
Dynamic Calibration Method of Sensor Drift Fault in HVAC System Based on Bayesian Inference

Abstract
:1. Introduction
2. Dynamic Calibration Process of Sensor Drift Fault in HVAC System Based on Bayesian Inference
2.1. Principles of Three Sensor Fault Detection Methods
2.1.1. Laida Criterion
2.1.2. Box-Plot
2.1.3. EWMA Control Diagram
2.2. Dynamic Calibration Method Based on Bayesian Inference
2.3. Lag Time and Calibration Time
3. Research Framework
- Data preparation
- Fault detection
- Fault calibration
- Influence factor
4. Case Description
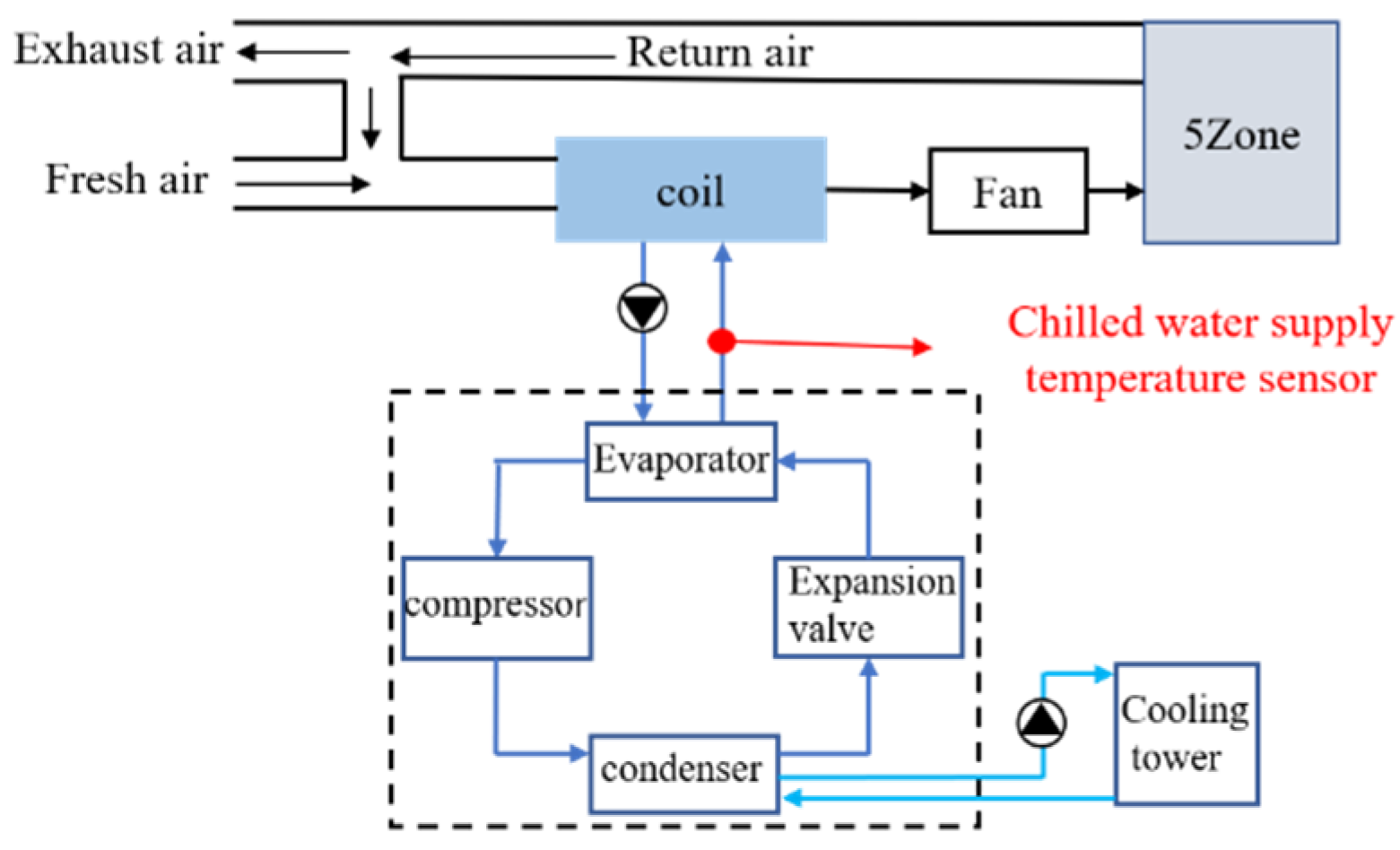
4.1. Case 1 Simulated Chiller System
4.2. Case 2 Actual Chiller System
5. Results and Discussion
5.1. Case 1
5.1.1. Discussion on Detection Methods
5.1.2. Fault Calibration
5.1.3. Relationship between Calibration Accuracy and Calibration Time
5.1.4. Discussion of Sensor Sampling Interval
5.2. Case 2
5.2.1. Discussion on Detection Methods
5.2.2. Influence of Modeling Data on Test Results
5.2.3. Fault Calibration
5.2.4. Relationship between Calibration Accuracy and Calibration Time
- Under the drift slope of 0.12 °C/h, with the increase in calibration time, the value and MAPE showed a trend of gradually increasing at first and then tending to be stable. The slope is stable at about 0.14 °C/h, and the MAPE value is stable at about 2%.
- The value of 0.18 °C/h increases with time, and the value gradually drops to the setting slope. The MAPE value gradually rises to around 4%.
- The value of 0.24 °C/h rises first, then decreases, and finally tends to be near the set slope. MAPE first decreased, then increased, and finally stabilized at around 4.5%.
5.2.5. Discussion of Sensor Sampling Interval
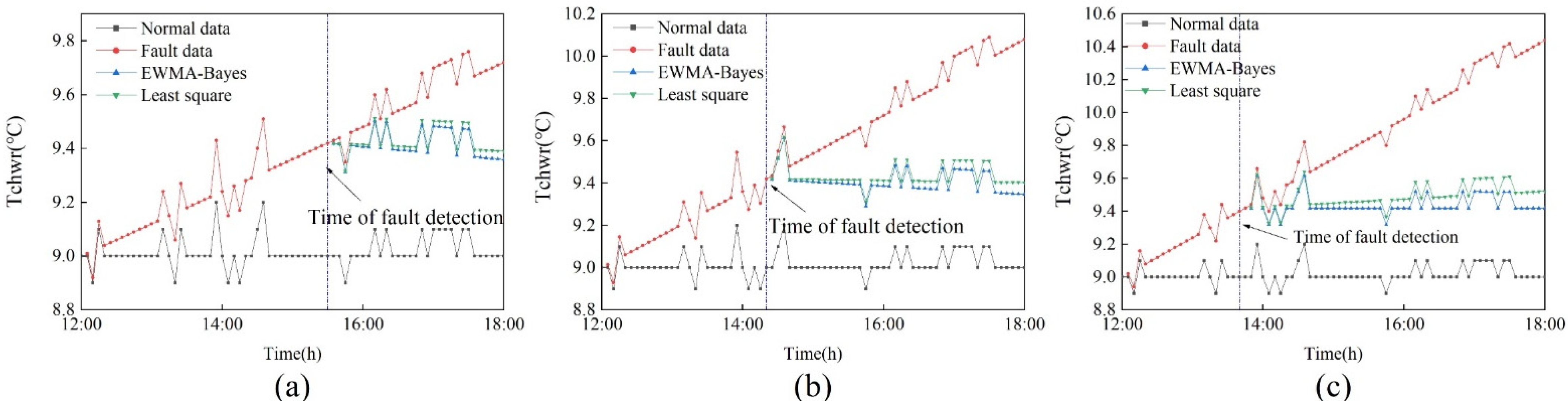
6. Comparison with Least Square Method
7. Conclusions
- (1)
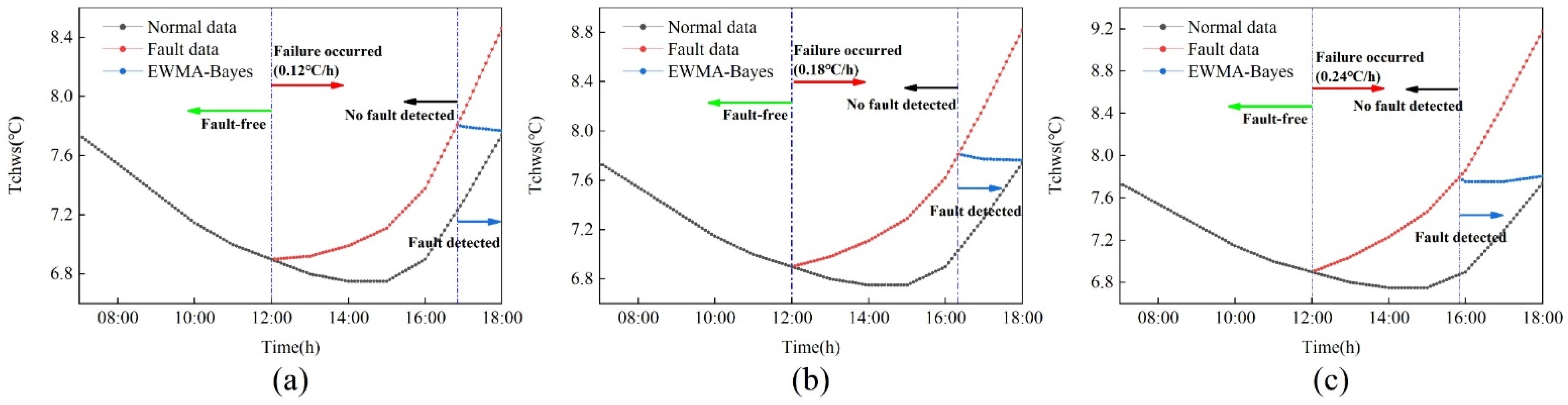
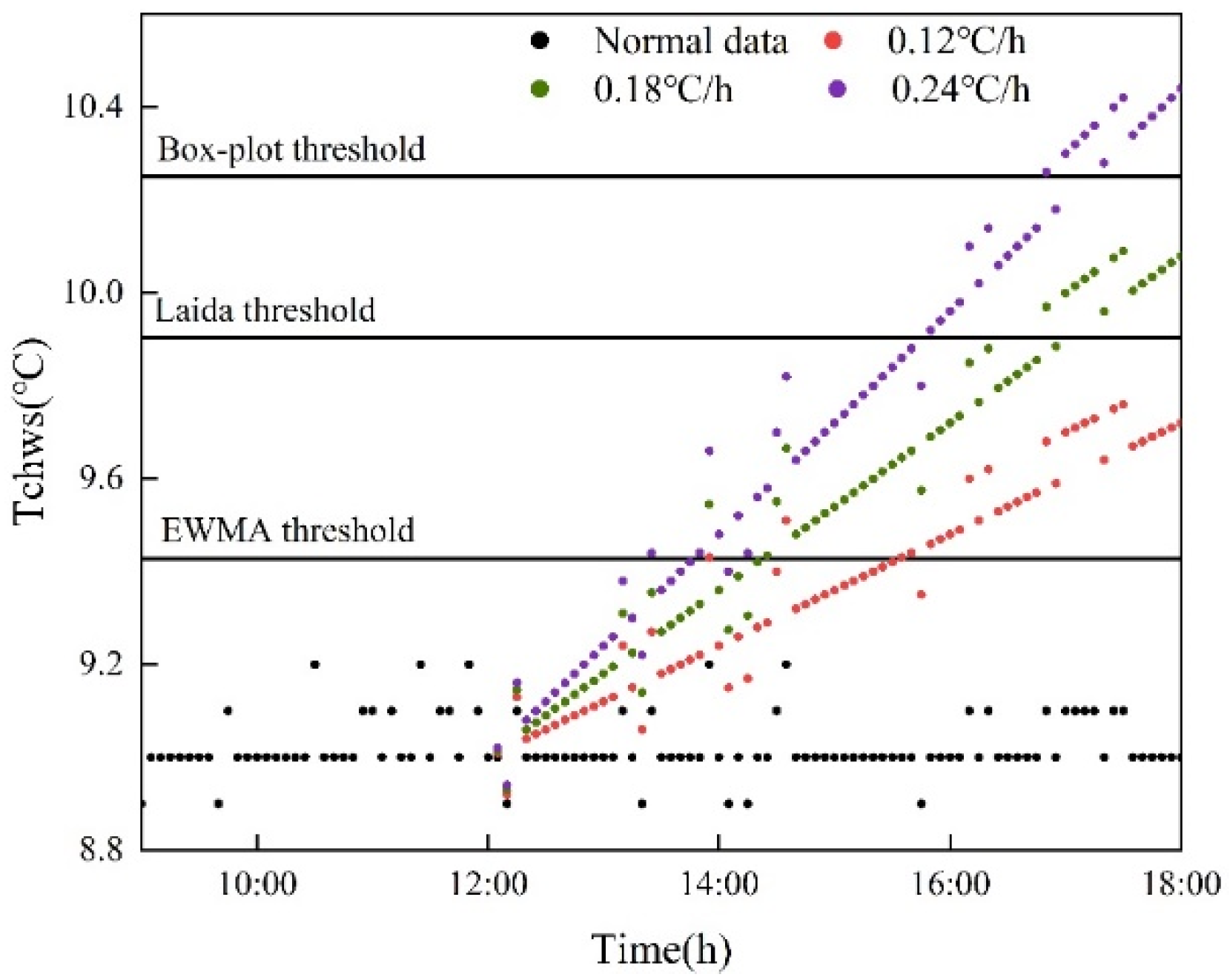
- Through the combination of the dynamic calibration method based on Bayesian inference and the fault detection method of the EWMA control chart, the detection accuracy method is better than the other two methods—Laida criterion and Box-plot—so as to shorten the lag time and improve the calibration accuracy.
- (2)
- After the dynamic calibration method based on Bayesian inference is used to calibrate various drift faults, the MAPE value between the calibrated data and the normal data under the actual data is less than 5%.
- (3)
- When the dynamic method based on Bayesian inference is used to calibrate the drift fault, the shorter the calibration time, the lower the calibration accuracy, and the greater the influence of the sensor sampling interval on the calibration accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bruton, K.; Raftery, P.; O’Donovan, P.; Aughney, N.; Keane, M.M.; O’Sullivan, D.T.J. Development and alpha testing of a cloud based automated fault detection and diagnosis tool for Air Handling Units. Autom. Constr. 2014, 39, 70–83. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, Z.; Wang, J.; Yue, C.; Yoon, S. A novel fault diagnosis and self-calibration method for air-handling units using Bayesian Inference and virtual sensing. Energy Build. 2021, 250, 111293. [Google Scholar] [CrossRef]
- Liu, T.; Xu, C.; Guo, Y.; Chen, H. A novel deep reinforcement learning based methodology for short-term HVAC system energy consumption prediction. Int. J. Refrig. 2019, 107, 39–51. [Google Scholar] [CrossRef]
- Fan, C.; Yan, D.; Xiao, F.; Li, A.; An, J.; Kang, X. Advanced data analytics for enhancing building performances: From data-driven to big data-driven approaches. Build. Simul. 2020, 14, 3–24. [Google Scholar] [CrossRef]
- Xu, X.; Xiao, F.; Wang, S. Enhanced chiller sensor fault detection, diagnosis and estimation using wavelet analysis and principal component analysis methods. Appl. Therm. Eng. 2008, 28, 226–237. [Google Scholar] [CrossRef]
- Li, G.; Zheng, Y.; Liu, J.; Zhou, Z.; Xu, C.; Fang, X.; Yao, Q. An improved stacking ensemble learning-based sensor fault detection method for building energy systems using fault-discrimination information. J. Build. Eng. 2021, 43, 102812. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Q.; Yu, Y.; Chen, X.; Yoon, S. Application of model-based control strategy to hybrid free cooling system with latent heat thermal energy storage for TBSs. Energy Build. 2018, 167, 89–105. [Google Scholar] [CrossRef]
- Li, G.; Hu, Y.; Chen, H.; Li, H.; Hu, M.; Guo, Y.; Shi, S.; Hu, W. A sensor fault detection and diagnosis strategy for screw chiller system using support vector data description-based D-statistic and DV-contribution plots. Energy. Build 2016, 133, 230–245. [Google Scholar] [CrossRef]
- Ng, K.H.; Yik, F.W.H.; Lee, P.; Lee, K.K.Y.; Chan, D.C.H. Bayesian method for HVAC plant sensor fault detection and diagnosis. Energy Build. 2020, 228, 110476. [Google Scholar] [CrossRef]
- Liu, J.; Hu, Y.; Chen, H.; Wang, J.; Li, G.; Hu, W. A refrigerant charge fault detection method for variable refrigerant flow (VRF) air-conditioning systems. Appl. Therm. Eng. 2016, 107, 284–293. [Google Scholar] [CrossRef]
- Chang, Z.; Zhang, Y.; Chen, W. Electricity price prediction based on hybrid model of adam optimized LSTM neural network and wavelet transform. Energy 2019, 187, 115804. [Google Scholar] [CrossRef]
- Zhao, L. Prediction model of ecological environmental water demand based on big data analysis. Environ. Technol. Innov. 2021, 21, 101196. [Google Scholar] [CrossRef]
- Chang, C.-J.; Li, D.-C.; Huang, Y.-H.; Chen, C.-C. A novel gray forecasting model based on the box plot for small manufacturing data sets. Appl. Math. Comput. 2015, 265, 400–408. [Google Scholar] [CrossRef]
- Huang, Y.; Xu, Q. Electricity theft detection based on stacked sparse denoising autoencoder. Int. J. Elec. Power 2021, 125, 106448. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, S.; Xiao, F. A statistical fault detection and diagnosis method for centrifugal chillers based on exponentially-weighted moving average control charts and support vector regression. Appl. Therm. Eng. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Jo, J.-H.; Lim, J.-H.; Song, S.-Y.; Yeo, M.-S.; Kim, K.-W. Characteristics of pressure distribution and solution to the problems caused by stack effect in high-rise residential buildings. Build. Environ. 2007, 42, 263–277. [Google Scholar] [CrossRef]
- Zhengwei, L.; Gongsheng, H. Preventive approach to determine sensor importance and maintenance requirements. Autom. Constr. 2013, 31, 307–312. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H. Virtual in-situ calibration method in building systems. Autom. Constr. 2015, 59, 59–67. [Google Scholar] [CrossRef] [Green Version]
- Mokhtari, A.; Ghodrat, M.; Javadpoor Langroodi, P.; Shahrian, A. Wind speed sensor calibration in thermal power plant using Bayesian inference. Case. Stud. Therm. Eng. 2020, 19, 100621. [Google Scholar] [CrossRef]
- Yoon, S. In-situ sensor calibration in an operational air-handling unit coupling autoencoder and Bayesian inference. Energy Build. 2020, 221, 110026. [Google Scholar] [CrossRef]
- Wang, P.; Li, J.; Yoon, S.; Zhao, T.; Yu, Y. The detection and correction of various faulty sensors in a photovoltaic thermal heat pump system. Appl. Therm. Eng. 2020, 175, 115347. [Google Scholar] [CrossRef]
- Choi, Y.; Yoon, S. Virtual sensor-assisted in situ sensor calibration in operational HVAC systems. Build. Environ. 2020, 181, 107079. [Google Scholar] [CrossRef]
- Zhao, T.; Li, J.; Wang, P.; Yoon, S.; Wang, J. Improvement of virtual in-situ calibration in air handling unit using data preprocessing based on Gaussian mixture model. Energy Build. 2022, 256, 111735. [Google Scholar] [CrossRef]
- Liu, T.; Jin, L.; Zhong, C.; Xue, F. Study of thermal sensation prediction model based on support vector classification (SVC) algorithm with data preprocessing. J. Build. Eng. 2022, 48, 103919. [Google Scholar] [CrossRef]
- Kim, H.-J.; Cho, Y.-H.; Lee, S.-H. A study on the sensor calibration method using data-driven prediction in VAV terminal unit. Energy Build. 2022, 258, 111449. [Google Scholar] [CrossRef]
- Jana, D.; Patil, J.; Herkal, S.; Nagarajaiah, S.; Duenas-Osorio, L. CNN and Convolutional Autoencoder (CAE) based real-time sensor fault detection, localization, and correction. Mech. Syst. Signal. Process. 2022, 169, 108723. [Google Scholar] [CrossRef]
- Wang, J.-S.; Yang, G.-H. Data-driven compensation method for sensor drift faults in digital PID systems with unknown dynamics. J. Process. Control. 2018, 65, 15–33. [Google Scholar] [CrossRef]
- Yu, Y.; Peng, M.-J.; Wang, H.; Ma, Z.-G.; Li, W. Improved PCA model for multiple fault detection, isolation and reconstruction of sensors in nuclear power plant. Ann. Nucl. Energy 2020, 148, 107662. [Google Scholar] [CrossRef]
- Lucas, J.M.; Saccucci, M.S. Exponentially Weighted Moving Average Control Schemes: Properties and Enhancements. Technometrics 1990, 32, 1–12. [Google Scholar] [CrossRef]
- Li, Q.; Yang, J.; Huang, S.; Zhao, Y. Generally weighted moving average control chart for monitoring two-parameter exponential distribution with measurement errors. Comput. Ind. Eng. 2022, 165, 107902. [Google Scholar] [CrossRef]
- Bai, H.; Wen, L.; Ma, Y.; Jia, X. Compression Reconstruction and Fault Diagnosis of Diesel Engine Vibration Signal Based on Optimizing Block Sparse Bayesian Learning. Sensors 2022, 22, 3884. [Google Scholar] [CrossRef] [PubMed]
- Ademujimi, T.; Prabhu, V. Fusion-Learning of Bayesian Network Models for Fault Diagnostics. Sensors 2021, 21, 7633. [Google Scholar] [CrossRef] [PubMed]
- Gao, T.; Li, Y.; Huang, X.; Wang, C. Data-Driven Method for Predicting Remaining Useful Life of Bearing Based on Bayesian Theory. Sensors 2020, 21, 182. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.-J.; Wang, Z.-C.; Chen, G.; Ren, W.-X.; Xin, Y. Markov Chain Monte Carlo-based Bayesian method for nonlinear stochastic model updating. J. Sound. Vib. 2022, 520, 116595. [Google Scholar] [CrossRef]
- Paul, S.; Sharma, R.; Tathireddy, P.; Gutierrez-Osuna, R. On-line drift compensation for continuous monitoring with arrays of cross-sensitive chemical sensors. Sens. Actuators B Chem. 2022, 368, 132080. [Google Scholar] [CrossRef]
- Piazzo, L.; Panuzzo, P.; Pestalozzi, M. Drift removal by means of alternating least squares with application to Herschel data. Signal. Processing 2015, 108, 430–439. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set Slope | Calculate Slope k | MAPE |
|---|---|---|
| 0.12 °C/h | 0.593 | 3.8% |
| 0.18 °C/h | 0.635 | 5.3% |
| 0.24 °C/h | 0.635 | 6.66 |
| Set Slope | Calculated Slope k | MAPE |
|---|---|---|
| 0.12 °C/h | 0.144 | 1.93% |
| 0.18 °C/h | 0.199 | 4.2% |
| 0.24 °C/h | 0.24 | 4.6% |
| Set Slope | EWMA-Bayes | Least Squares |
|---|---|---|
| 0.12 °C/h | 1.93% | 4.2% |
| 0.18 °C/h | 4.2% | 4.56% |
| 0.24 °C/h | 4.6% | 5.87% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Hu, H.; Gao, J.; Fang, X. Dynamic Calibration Method of Sensor Drift Fault in HVAC System Based on Bayesian Inference. Sensors 2022, 22, 5348. https://doi.org/10.3390/s22145348
Li G, Hu H, Gao J, Fang X. Dynamic Calibration Method of Sensor Drift Fault in HVAC System Based on Bayesian Inference. Sensors. 2022; 22(14):5348. https://doi.org/10.3390/s22145348
Chicago/Turabian StyleLi, Guannan, Haonan Hu, Jiajia Gao, and Xi Fang. 2022. "Dynamic Calibration Method of Sensor Drift Fault in HVAC System Based on Bayesian Inference" Sensors 22, no. 14: 5348. https://doi.org/10.3390/s22145348