
Application of Initial Bias Estimation Method for Inertial Navigation System (INS)/Doppler Velocity Log (DVL) and INS/DVL/Gyrocompass Using Micro-Electro-Mechanical System Sensors



Abstract
:1. Introduction
2. System Using Initial Bias Estimation by Inversion of Inertial Navigation Calculations
2.1. Initial Bias Estimation
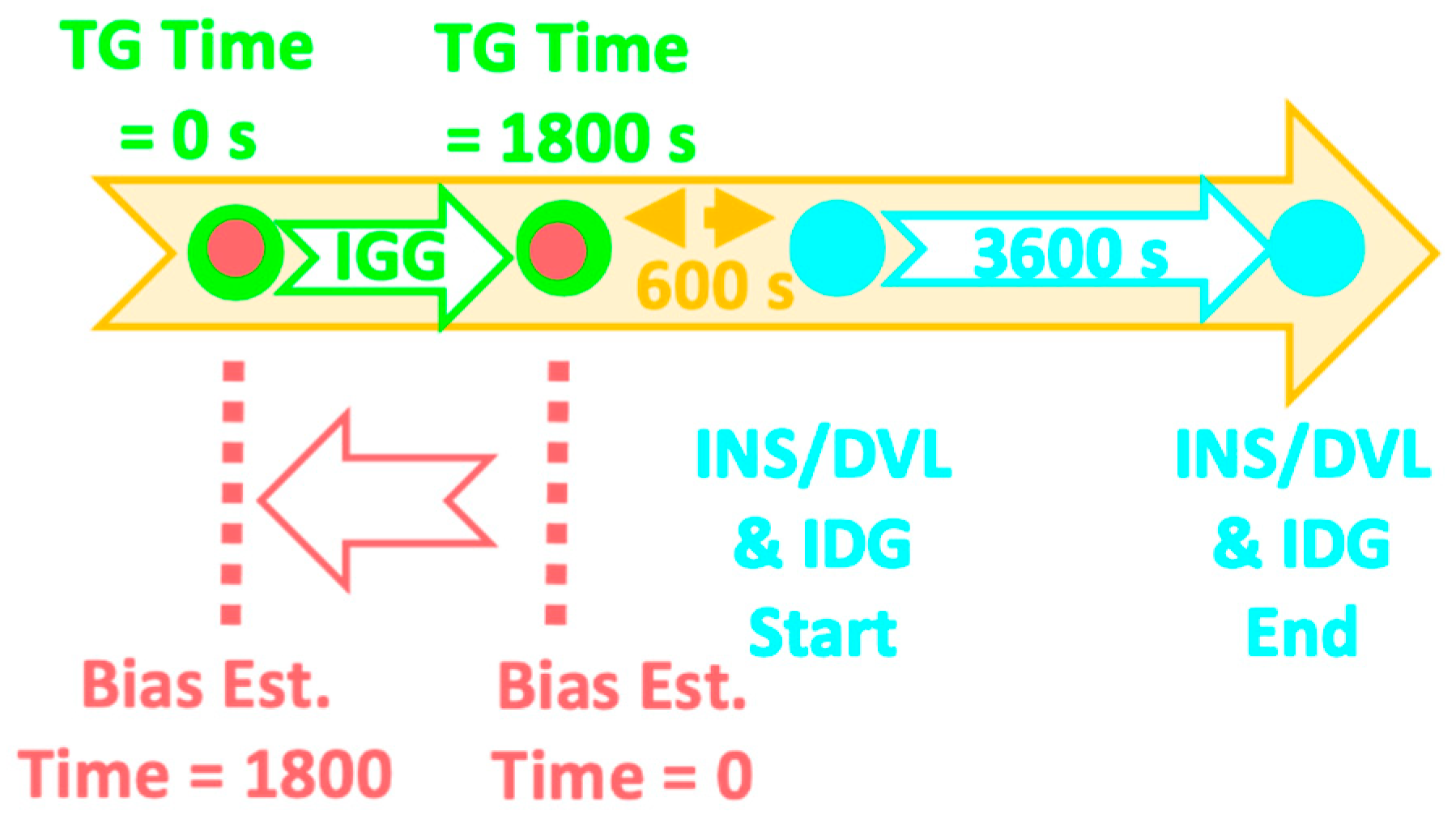
2.2. IGG and IDG Integration
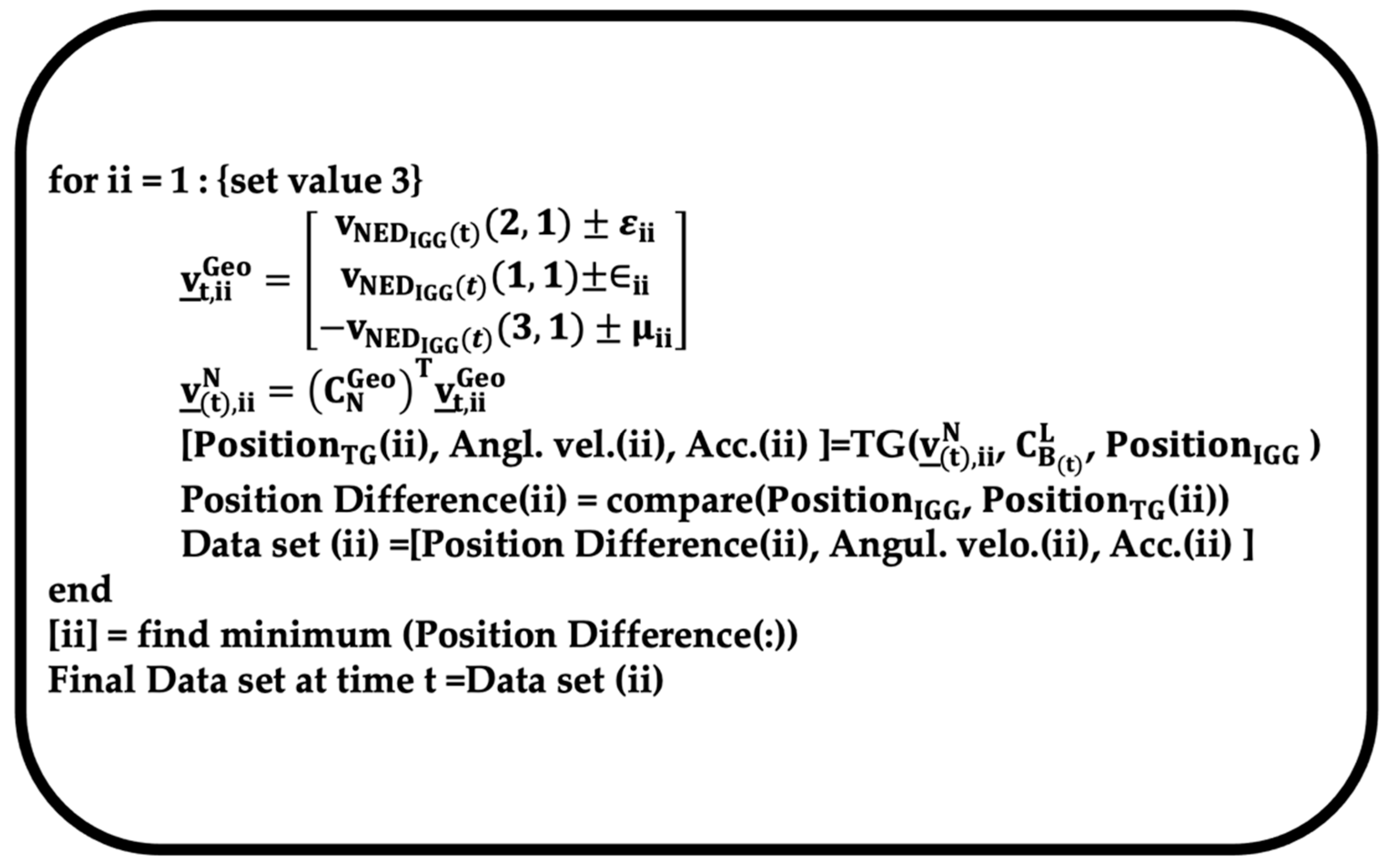
2.3. Acceleration and Angular Velocity Estimation Using Inverted Form of INS Calculation
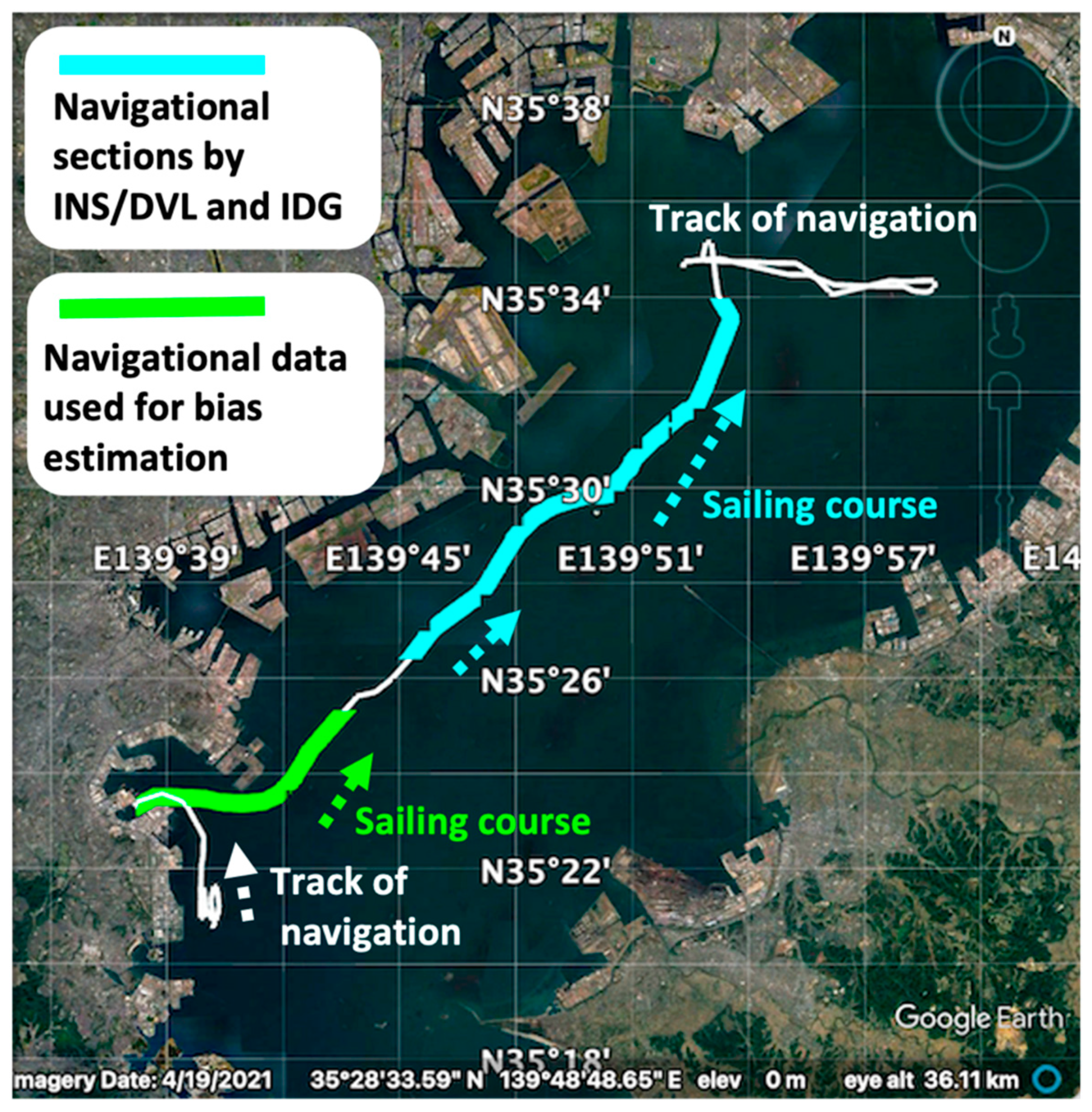
3. Experiment Outline and Results
3.1. Initial Bias Estimation
3.2. Estimation Results from Inverse Inertial Navigation Calculations
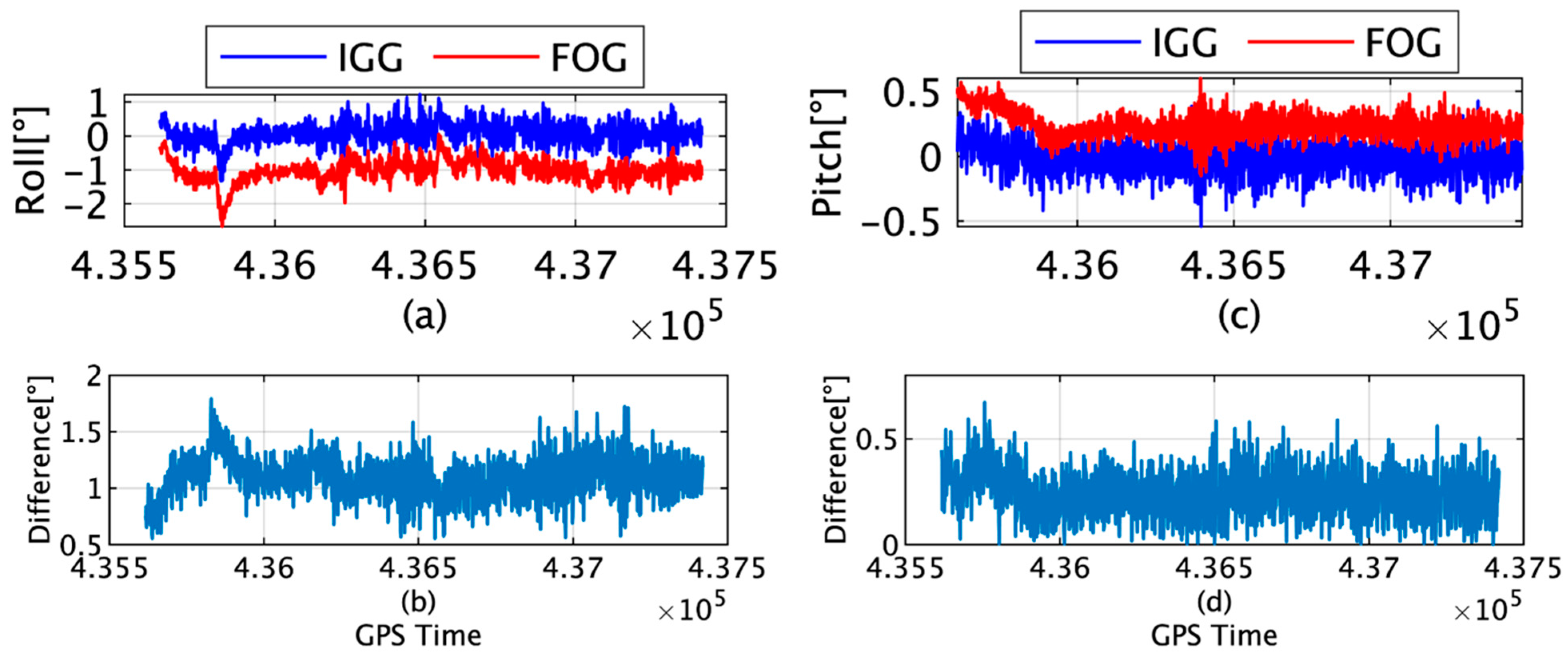
3.2.1. Comparison between IGG and Reference Estimations
3.2.2. Comparison of the TG and IGG Estimates
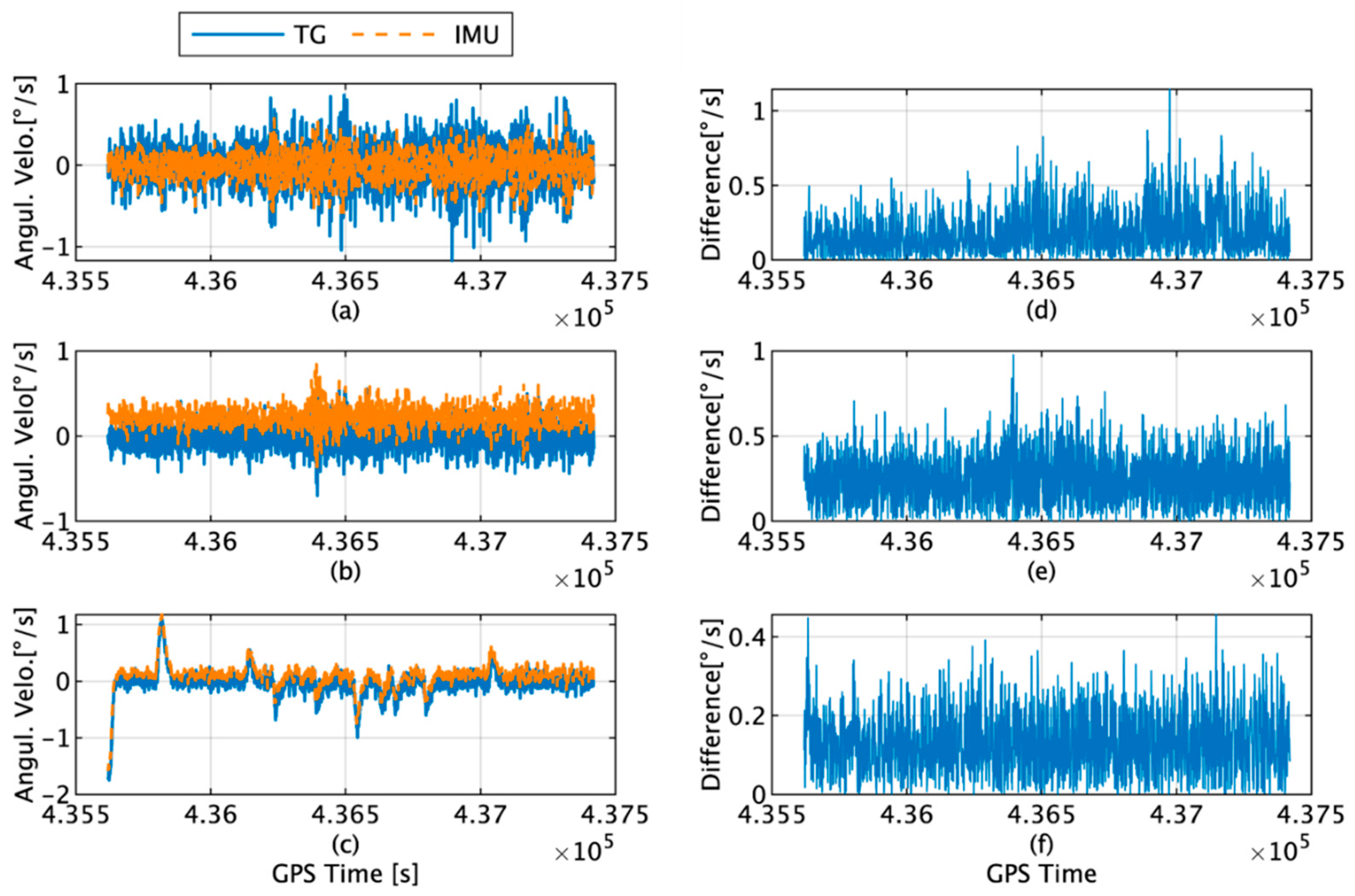
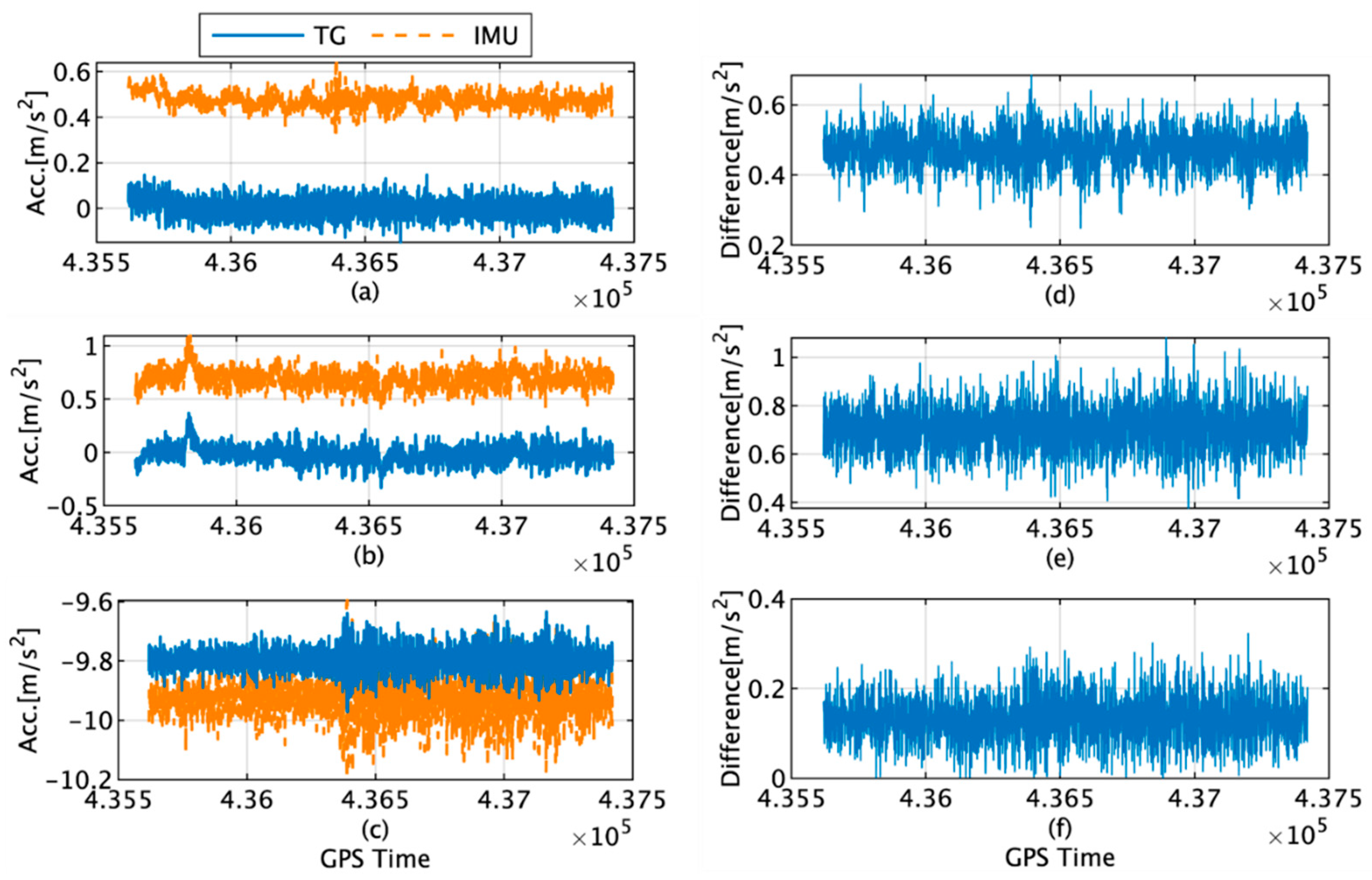
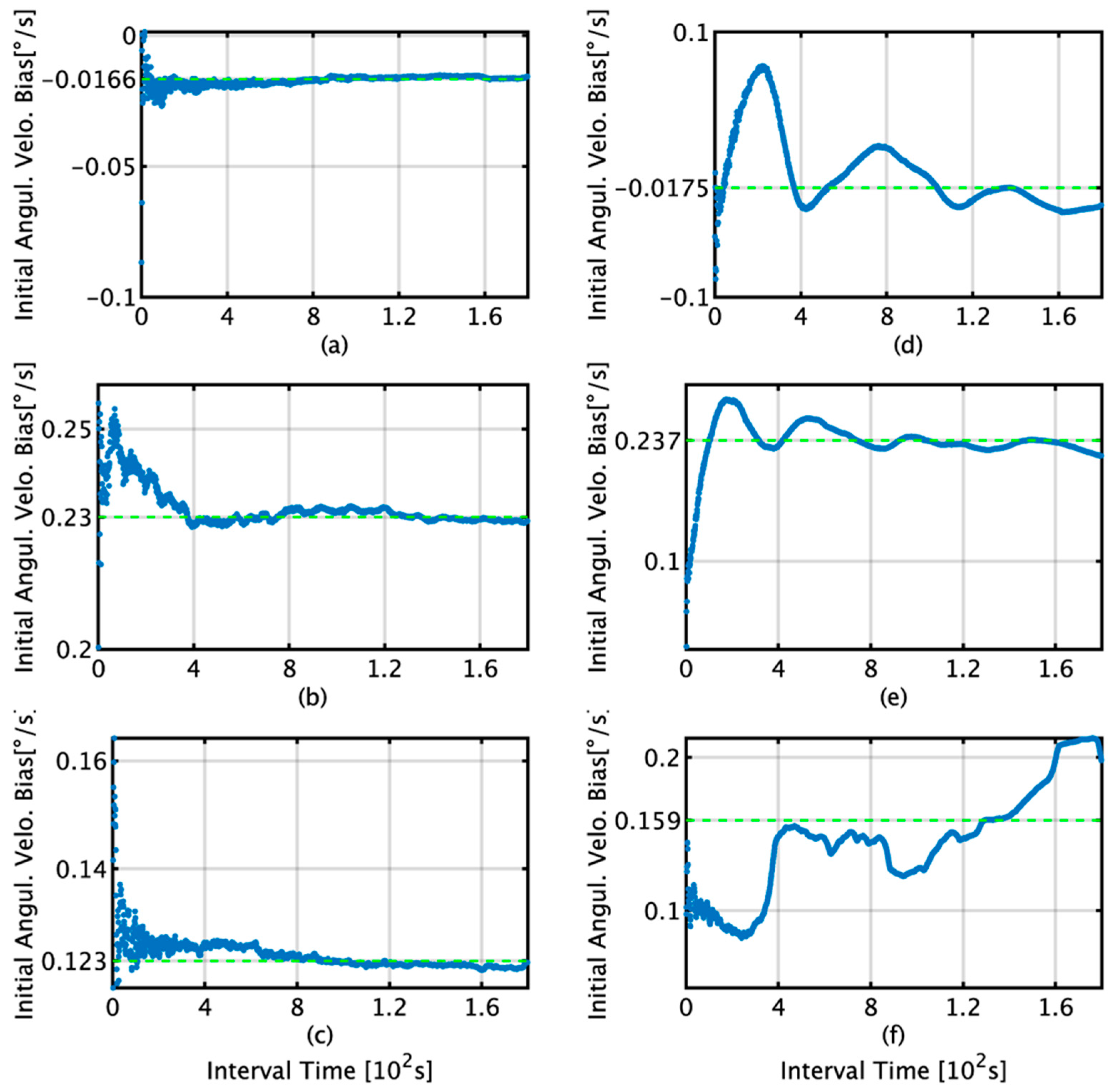
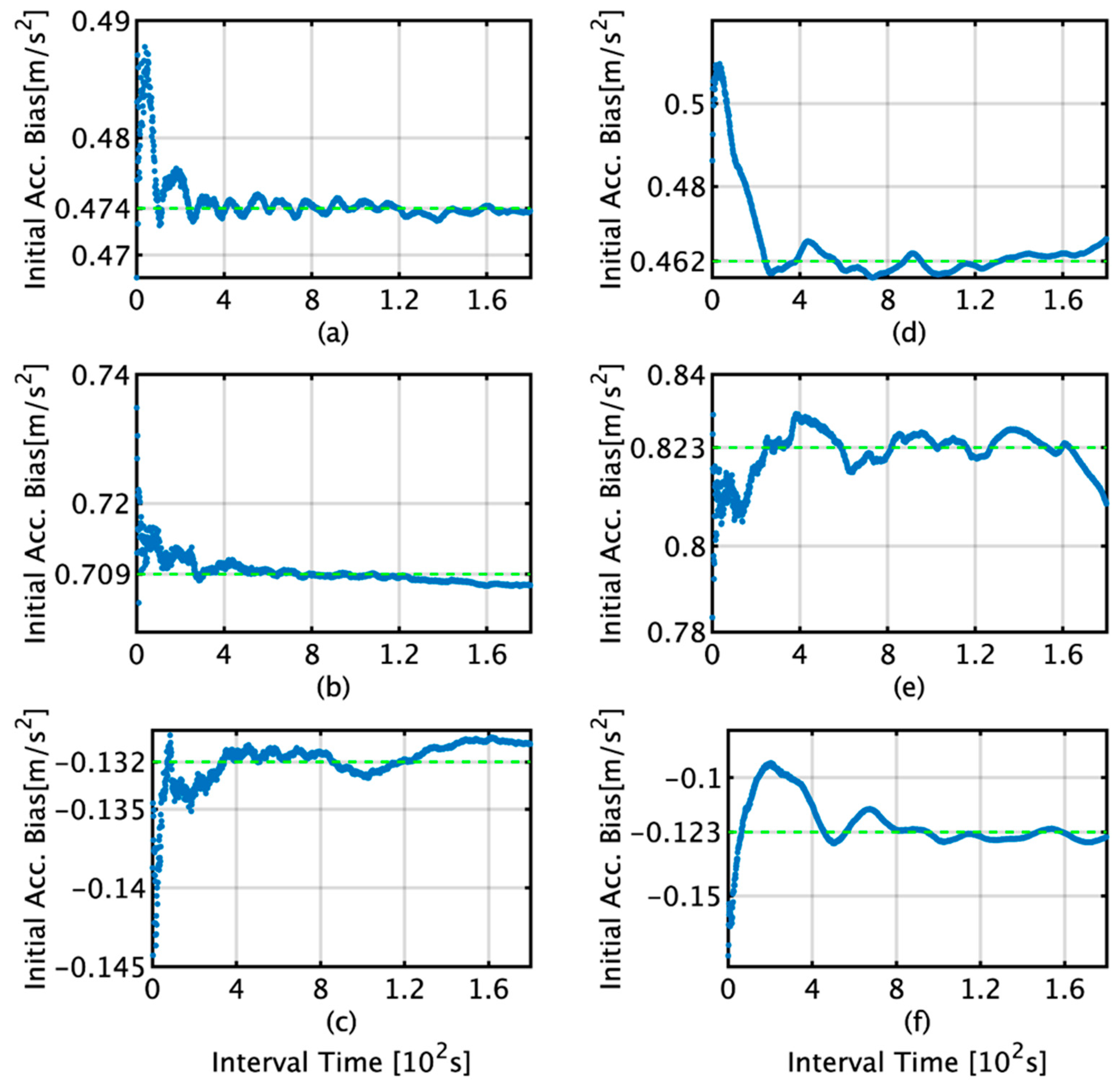
3.2.3. Estimates of Angular Velocity and Acceleration (Specific Force)
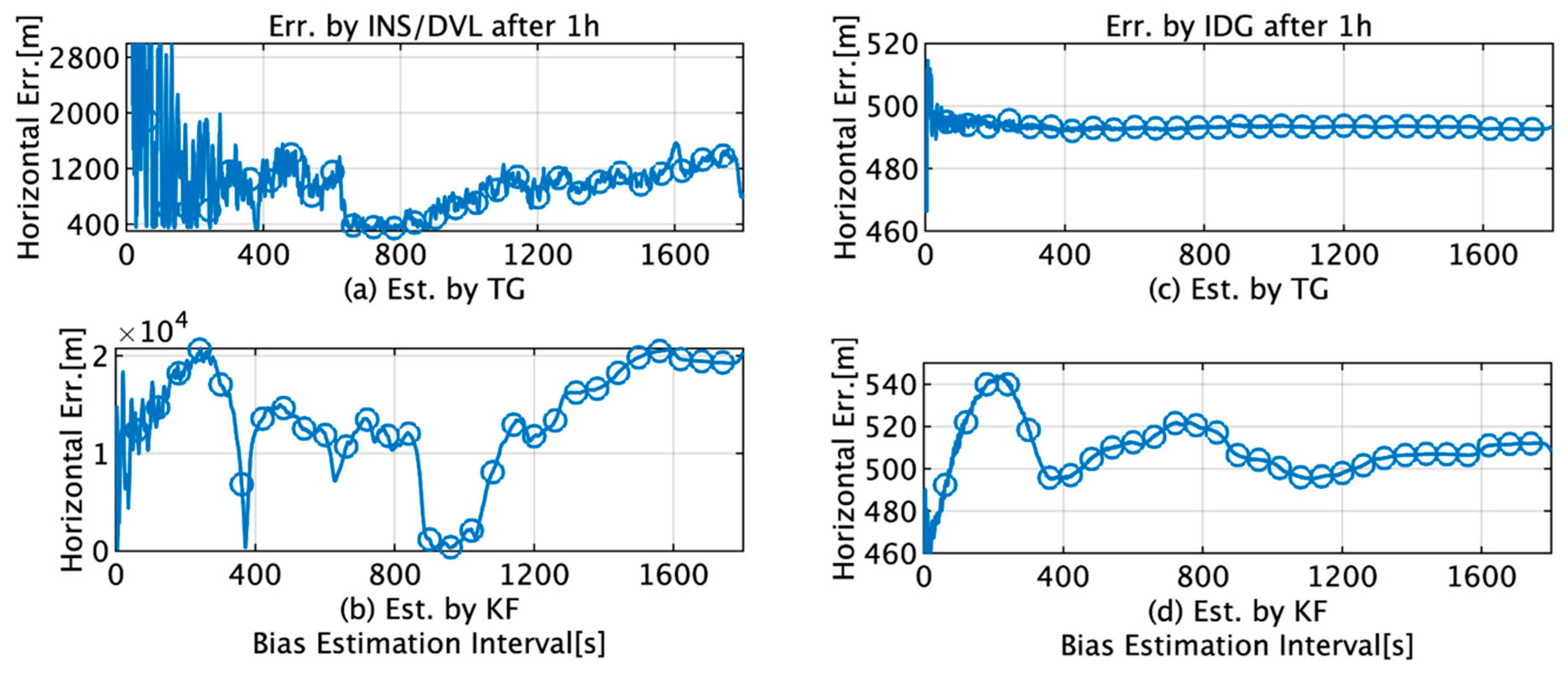
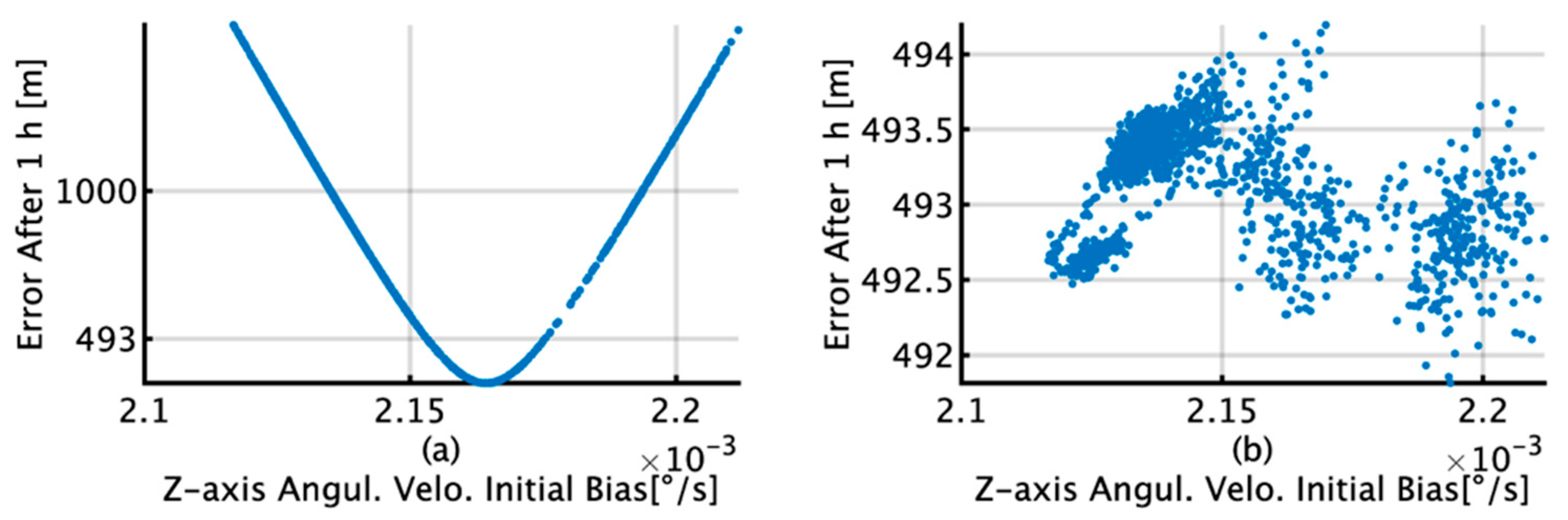
3.3. Comparison of Estimates Based on the Interval of Data Used to Estimate the Initial Bias
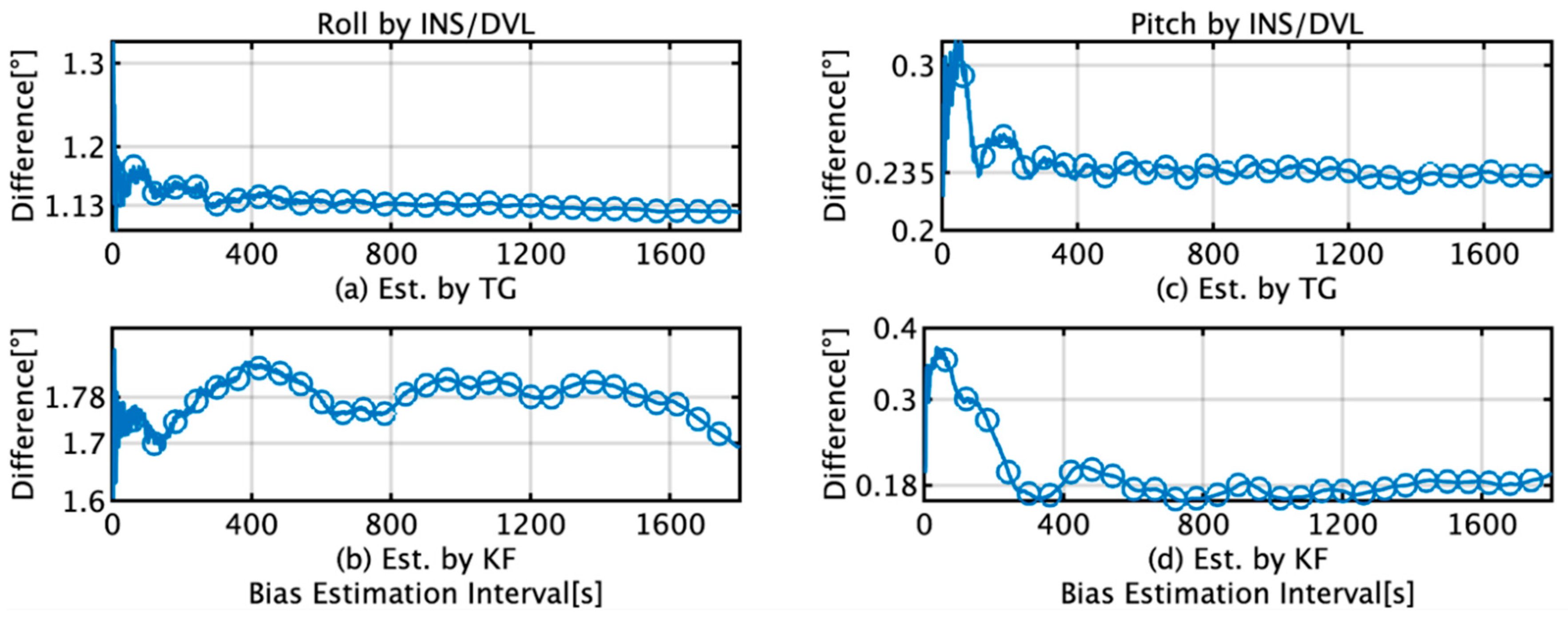
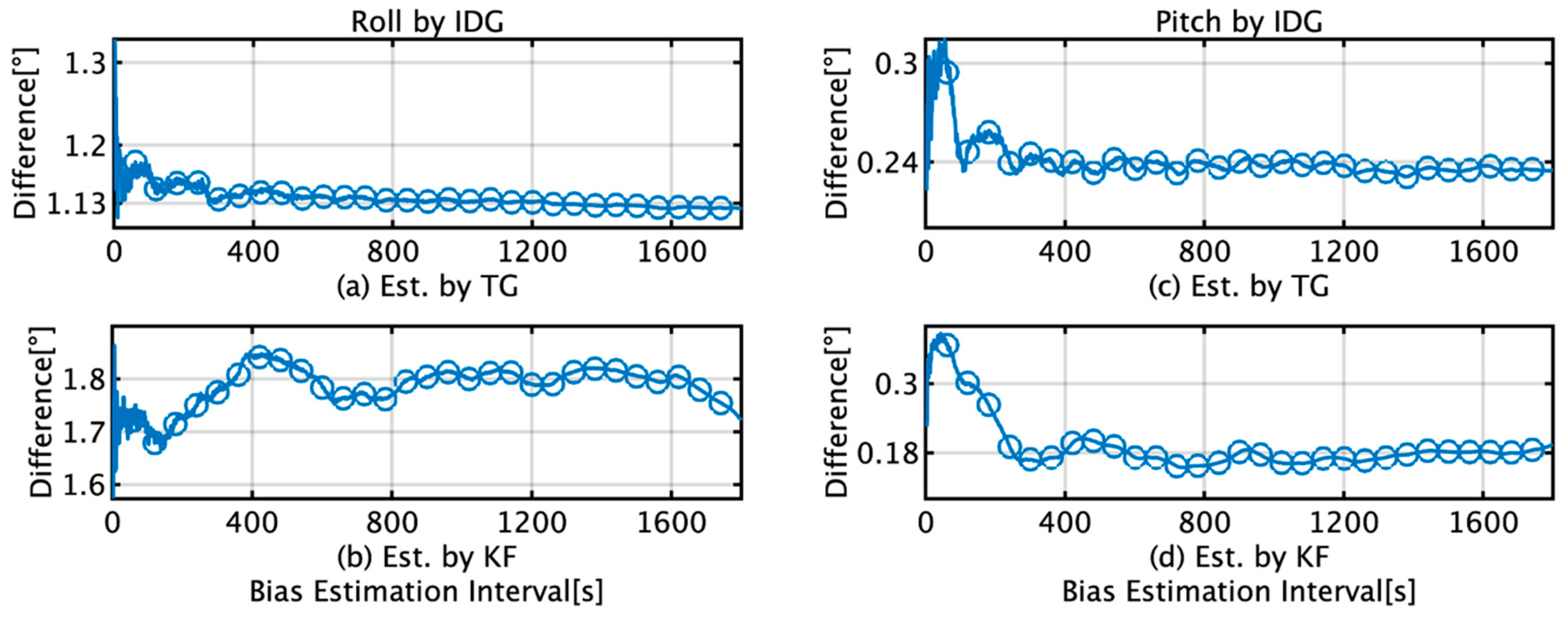
3.3.1. Comparison of Results with Initial Bias Estimation Using the TG and KF
3.3.2. Initial Bias Estimation and Position Estimation Results Using TG and KF
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References and Notes
- Center for Advanced Defense Studies (C4ADS). Above Us Only Stars: Exposing GPS Spoofing in Russia and Syria; Center for Advanced Defense Studies (C4ADS): Washington, DC, USA, 2019; Available online: https://static1.squarespace.com/static/566ef8b4d8af107232d5358a/t/5c99488beb39314c45e782da/1553549492554/Above+Us+Only+Stars.pdf (accessed on 10 May 2022).
- Gao, G.X.; Sgammini, M.; Lu, M.; Kubo, N. Protecting GNSS receivers from jamming and interference. Proc. IEEE 2016, 104, 1327–1338. [Google Scholar] [CrossRef]
- Kobayashi, K.; Kubo, N. Spoofing detection on ships using multipath monitoring and moving-baseline analysis. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2020), online, 21–25 September 2020; pp. 2383–3293. [Google Scholar] [CrossRef]
- Kobayashi, K.; Kubo, N.; Sakai, T. Research about GNSS spoofing detection by multipath monitoring. J. Jpn. Soc. Aeronaut. Space Sci. 2021, 69, 247–256. [Google Scholar] [CrossRef]
- Romanovas, M.; Ziebold, R.; Lança, L. A method for IMU/GNSS/Doppler velocity log integration in marine applications. In Proceedings of the 2015 International Association of Institutes of Navigation World Congress (IAIN), Prague, Czech Republic, 20–23 October 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Ambrosovskaya, E.; Romaev, D.; Proskurnikov, A.; Loginov, A.; Mordvintsev, A.; Miroshnikov, A.; Fedorov, I. Deep integration of INS and DP: From theory to Experiments. IFAC Pap. Online 2021, 54, 132–138. [Google Scholar] [CrossRef]
- Ziebold, R.; Medina, D.; Romanovas, M.; Laas, C.; Gewies, S. Performance characterization of GNSS/IMU/DVL integration under real maritime jamming conditions. Sensors 2018, 18, 2954. [Google Scholar] [CrossRef] [Green Version]
- Fukuda, G.; Hatta, D.; Guo, X.; Kubo, N. Performance evaluation of IMU and DVL integration in marine navigation. Sensors 2021, 21, 1056. [Google Scholar] [CrossRef] [PubMed]
- El-Diasty, M.; El-Rabbany, A.; Pagiatakis, S. Stochastic characteristics of temperature-dependent MEMS-based inertial sensor error. In Proceedings of the 2006 National Technical Meeting of the Institute of Navigation National Technical Meeting NTM 2006, Monterey, CA, USA, 18–20 January 2006; pp. 1017–1027. [Google Scholar] [CrossRef]
- Savage, P.G. Strapdown Analytics Second Edition Part 2; Strapdown Associates Inc.: Maple Plain, MN, USA, 2000. [Google Scholar]
- Zhang, Y.; Yang, X.; Xing, X.; Wang, Z.; Xiong, Y. The standing calibration method of mems gyro bias for autonomous pedestrian navigation system. J. Navig. 2016, 70, 607–617. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Xu, X. An IMM-aided ZUPT methodology for an INS/DVL integrated navigation system. Sensors 2017, 17, 2030. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karmozdi, A.; Hashemi, M.; Salarieh, H. Design and practical implementation of kinematic constraints in Inertial Navigation System-Doppler Velocity Lob (INS-DVL)-based navigation. J. Inst. Navig. 2018, 65, 629–642. [Google Scholar] [CrossRef]
- NovAtel, Inc. Inertial Explorer® User Guide, version 8.50; NovAtel Inc.: Calgary, AB, Canada, 2013. [Google Scholar]
- Fukuda, G.; Hatta, D.; Kubo, N. A study on estimation of acceleration and angular velocity from actual measurements by trajectory generator. J. Jpn. Inst. Navig. 2021, 144, 14–20. [Google Scholar] [CrossRef]
- Savage, P.G. Strapdown Analytics Second Edition Part 1; Strapdown Associates Inc.: Maple Plain, MN, USA, 2000. [Google Scholar]
- Gonzalez, R.; Catania, C.; Dabove, P.; Taffernaberry, C.; Piras, M. Model validation of an open-source framework for post-processing INS/GNSS systems. In Proceedings of the 3rd International Conference on Geographical Information Systems Theory. Applications and Management (GISTAM 2017), Porto, Portugal, 27–28 April 2017; pp. 201–208. [Google Scholar] [CrossRef]
- Gonzalez, R.; Dabove, P. Performance assessment of an ultra low-cost inertial measurement unit for ground vehicle navigation. Sensors 2019, 19, 3865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Savage, P.G. Strapdown Inertial Navigation Lecture Notes; Strapdown Associates Inc.: Maple Plain, MN, USA, 2010. [Google Scholar]
- González, R.; Giribet, J.I.; Patiño, H.D. An approach to benchmarking of loosely coupled low-cost navigation systems. Math. Comput. Modell. Dyn. Syst. 2015, 21, 272–287. [Google Scholar] [CrossRef]
- Gonzalez, R.; Giribet, J.I.; Patino, H.D. NaveGo: A simulation framework for low-cost integrated navigation systems. Control Eng. Appl. Inf. 2015, 17, 110–120. [Google Scholar]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering; John Wiley & Sons, Inc.: New York, NY, USA, 1992. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House on Demand: Norwood, MA, USA, 2013. [Google Scholar]
- Li, W.; Zhang, L.; Sun, F.; Yang, L.; Chen, M.; Li, Y. Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation. Optik 2015, 126, 3872–3876. [Google Scholar] [CrossRef]
- TOKYO AIRCRAFT INSTRUMENT CO., LTD. CSM-MG100 Specification. 2021. Available online: https://www.gnas.jp/en/imu/products/csm-mg100/ (accessed on 10 May 2022).
- Japan Aviation Electronics Industry, Ltd. JCS7402-A Specification. 2021. Available online: https://www.jae.com/files/user/doc/JCS7402-A.pdf (accessed on 10 May 2022).
- TOKYO KEIKI. GYRO COMPASS TG-5000. Catalog Copy Obtained from TOKYO KEIKI (Received 22 December 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Full Term |
|---|---|
| TG | Trajectory Generator |
| INS | Inertial Navigation System |
| DVL | Doppler Velocity Log |
| IDG | INS/DVL/Gyrocompass |
| IGG | INS/GPS/Gyrocompass |
| KF | Kalman Filter |
| GNSS | IMU | DVL | FOG | |||
|---|---|---|---|---|---|---|
| Name | Trimble SPS855 | CSM-MG100 | ATLAS DOLOG SYSTEM | JCS7402-A | ||
| Freq. | 5 Hz | 100 Hz | 1 Hz | 1 Hz | ||
| Accuracy | Position | Gyro | Acc. | Position | Speed | Roll and Pitch |
| <0.1 [m] | ±0.00175 [rad/s] | ±0.01 [m/s2] | 3.0 m RMS or Less | 0.01 [knot] or 0.2% of the measured value | ≤±0.15° at input ≤±10° ≤±(0.2° + 1% of input) at input = ±10°–45° | |
| Setting Time | Within 2 h | Accuracy on Scorsby Table | ≤±0.5° |
| Setting Point Error | ≤±0.3° | Repeatability of Setting Point | ≤±0.2° |
| RMS Value | ≤0.1° | Accuracy Under Environmental Variation | ≤±0.5° |
| Roll by ISN/DVL (°) | Pitch by INS/DVL (°) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Total | Over 400 s | Total | Over 400 s | |||||||
| Max. | Min. | Max. | Min. | Ave. | Max. | Min. | Max. | Min. | Ave. | |
| By TG | 1.33 | 1.10 | 1.15 | 1.12 | 1.13 | 0.31 | 0.22 | 0.24 | 0.23 | 0.24 |
| By KF | 1.86 | 1.60 | 1.83 | 1.69 | 1.78 | 0.37 | 0.16 | 0.20 | 0.16 | 0.18 |
| Roll by IDG (Degree) | Pitch by IDG (Degree) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Total | Over 400 s | Total | Over 400 s | |||||||
| Max. | Min. | Max. | Min. | Ave. | Max. | Min. | Max. | Min. | Ave. | |
| By TG | 1.33 | 1.11 | 1.14 | 1.12 | 1.13 | 0.31 | 0.23 | 0.24 | 0.23 | 0.23 |
| By KF | 1.86 | 1.57 | 1.85 | 1.72 | 1.80 | 0.39 | 0.15 | 0.20 | 0.15 | 0.18 |
| Err. by INS/DVL after 1 h (m) | Err. by IDG after 1 h (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Total | Over 400 s | Total | Over 400 s | |||||||
| Max. | Min. | Max. | Min. | Ave. | Max. | Min. | Max. | Min. | Ave. | |
| By TG | 1.76 × 104 | 340 | 1569 | 340 | 921 | 515 | 466 | 494 | 492 | 493 |
| By KF | 2.08 × 104 | 217 | 2.06 × 104 | 345 | 1.31 × 104 | 544 | 442 | 522.00 | 495 | 507 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fukuda, G.; Kubo, N. Application of Initial Bias Estimation Method for Inertial Navigation System (INS)/Doppler Velocity Log (DVL) and INS/DVL/Gyrocompass Using Micro-Electro-Mechanical System Sensors. Sensors 2022, 22, 5334. https://doi.org/10.3390/s22145334
Fukuda G, Kubo N. Application of Initial Bias Estimation Method for Inertial Navigation System (INS)/Doppler Velocity Log (DVL) and INS/DVL/Gyrocompass Using Micro-Electro-Mechanical System Sensors. Sensors. 2022; 22(14):5334. https://doi.org/10.3390/s22145334
Chicago/Turabian StyleFukuda, Gen, and Nobuaki Kubo. 2022. "Application of Initial Bias Estimation Method for Inertial Navigation System (INS)/Doppler Velocity Log (DVL) and INS/DVL/Gyrocompass Using Micro-Electro-Mechanical System Sensors" Sensors 22, no. 14: 5334. https://doi.org/10.3390/s22145334