
Intelligent Reflecting Surfaces Assisted UAV Communications for Massive Networks: Current Trends, Challenges, and Research Directions

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
1.1. Advantages of IRS-Assisted UAV Communication
- ✓
- In case of absence of LoS links due to any blockage between UAV and ground users, virtual LoS links can be established through IRS. Therefore, communication quality can be enhanced, which further extends the wireless network coverage;
- ✓
- When IRS is installed on a moving UAV, a new degree of freedom can be obtained for IRS as UAV’s mobility and IRS’s position can be dynamically configured;
- ✓
- When IRS is installed on a moving UAV, a direct LoS link can be designed between transmitter and receiver. By installing IRS on a UAV, full-angle reflection can be obtained which further extends network coverage;
- ✓
- Both IRS and UAV can operate in mmWave and terahertz (THz) band, empowering high data rate and ultra-bandwidth. As mmWave and THz links are prone to blockage and high path loss, IRS’s reconfigurability and UAV’s mobility can effectively compensate these issues;
- ✓
- IRS-assisted UAV communication can significantly improve the achievable data rate signal-to-noise-ratio (SNR). A recent study considers ground-based IRS to improve ground-air UAV communication [27];
- ✓
- IRS-assisted UAV can effectively improve communication quality and data rate as IRS can be easily integrated with promising technologies, such as free-space optics (FSO) and non-orthogonal multiple access (NOMA);
- ✓
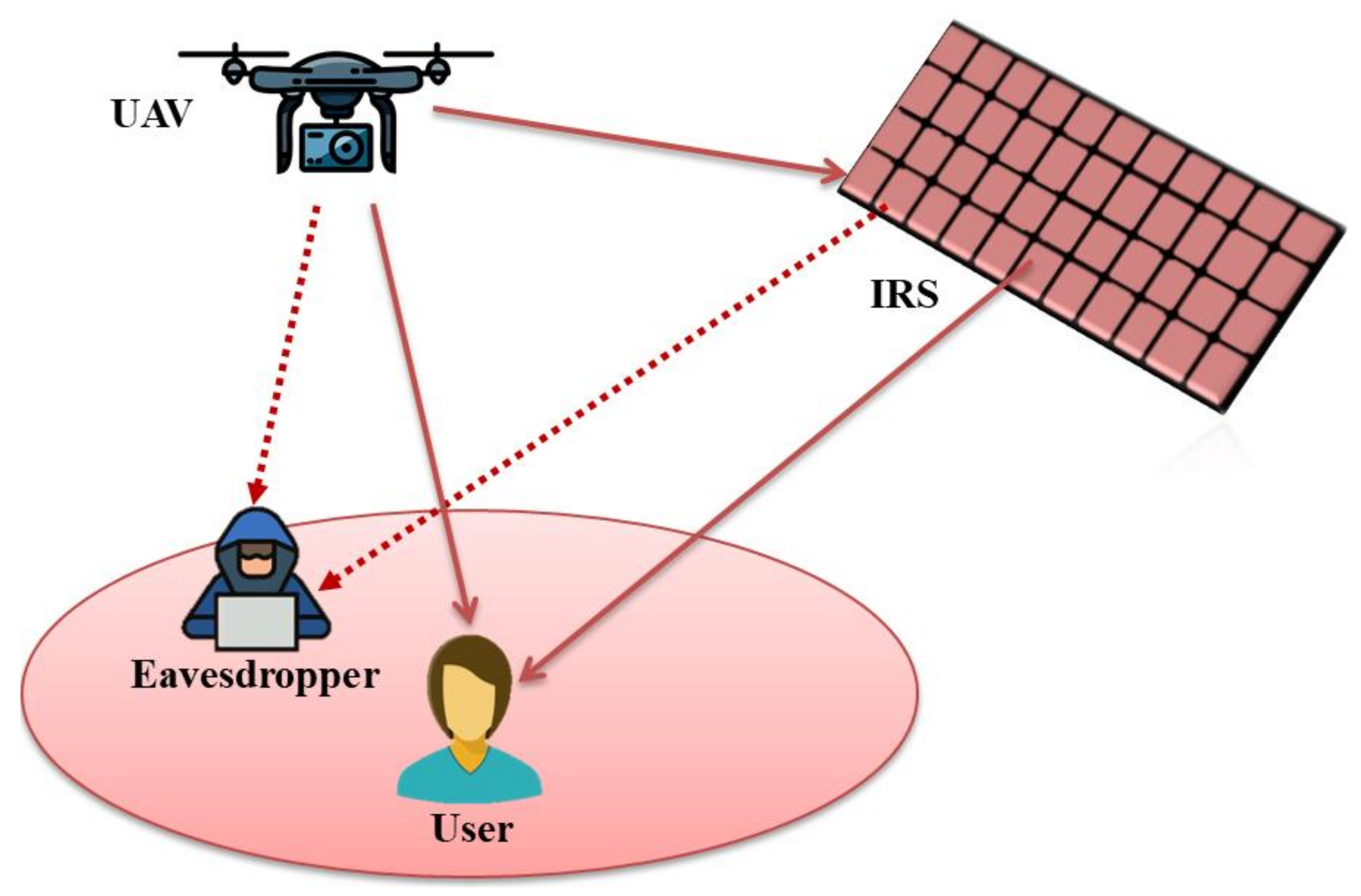
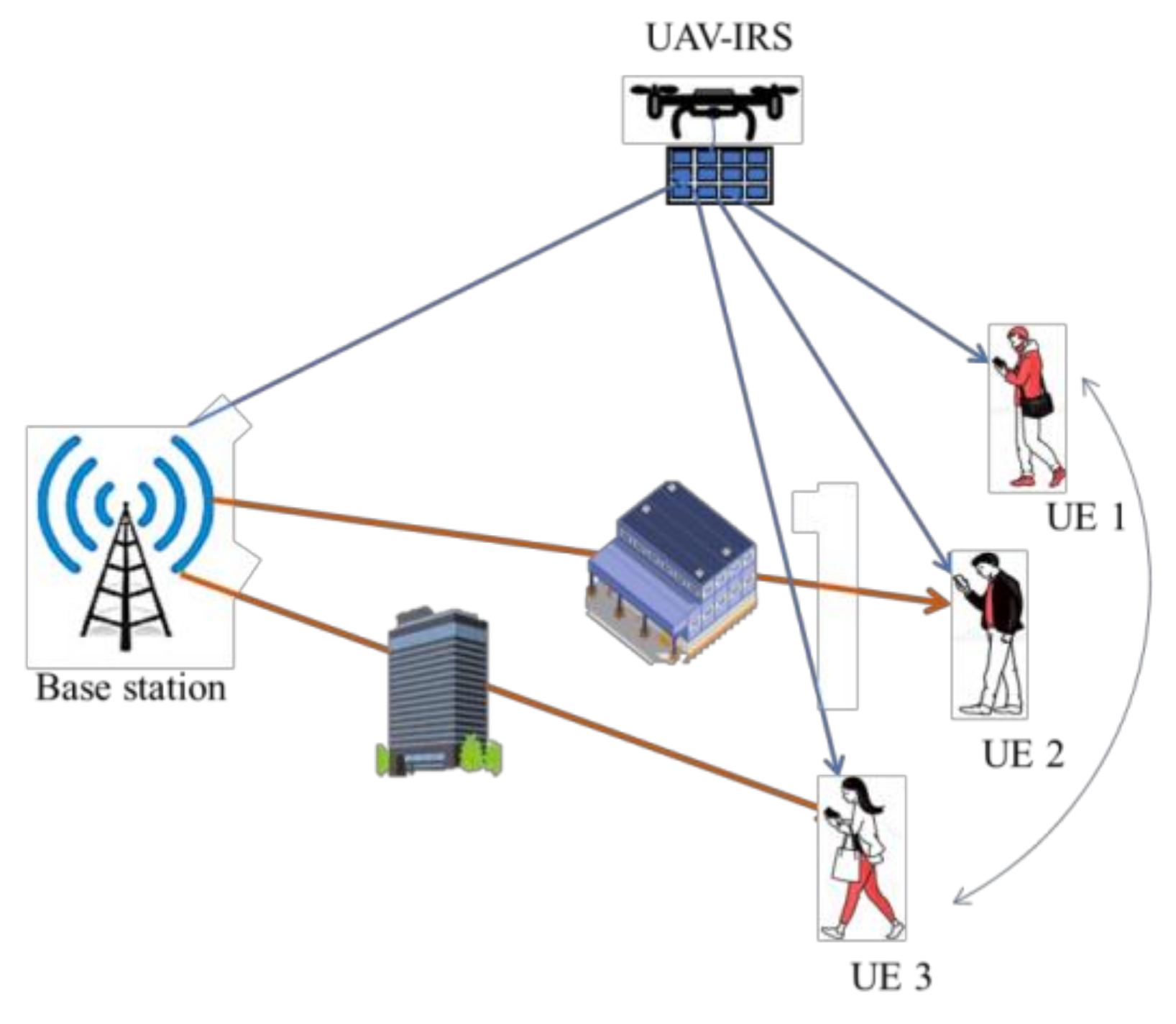
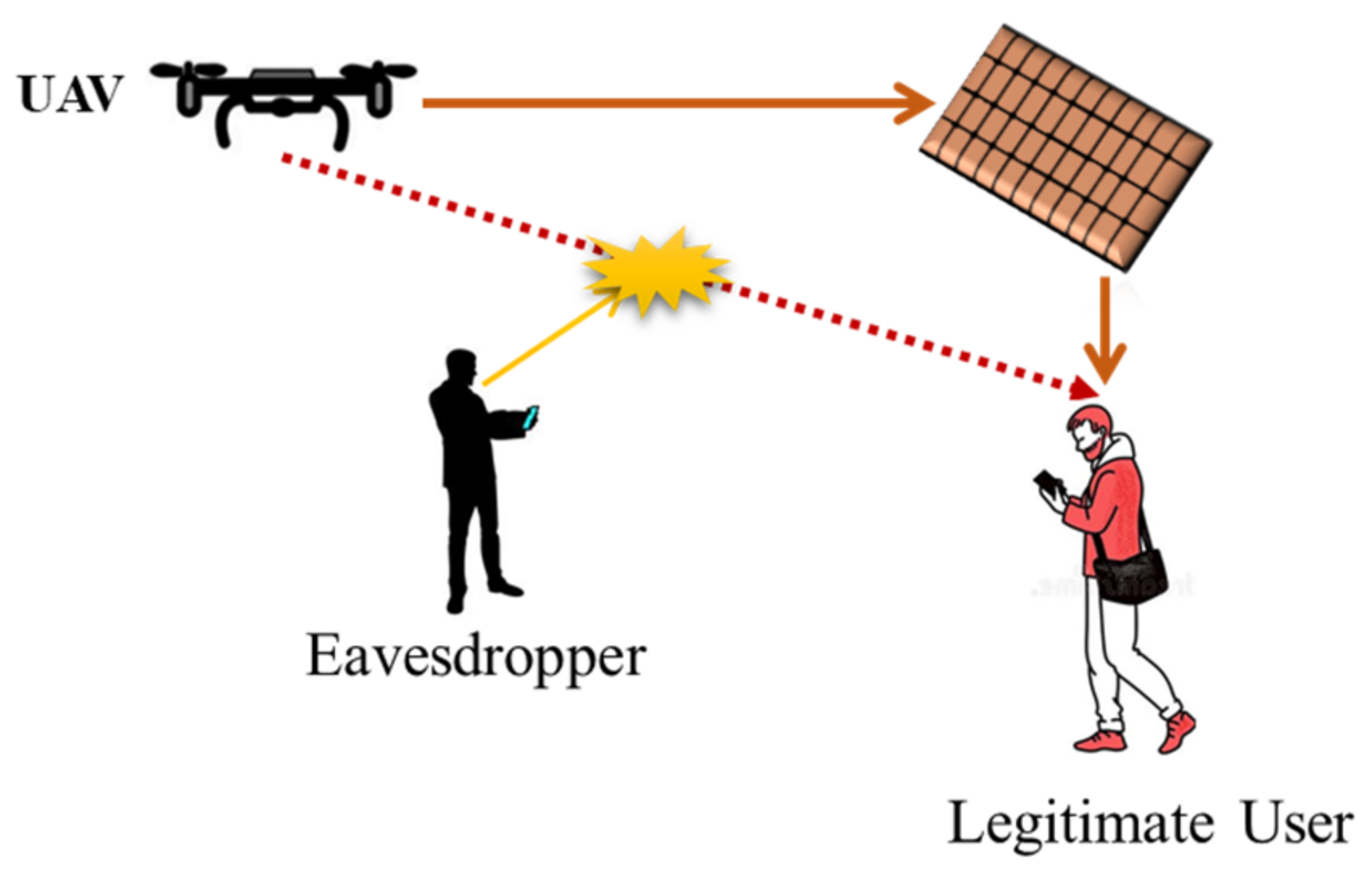
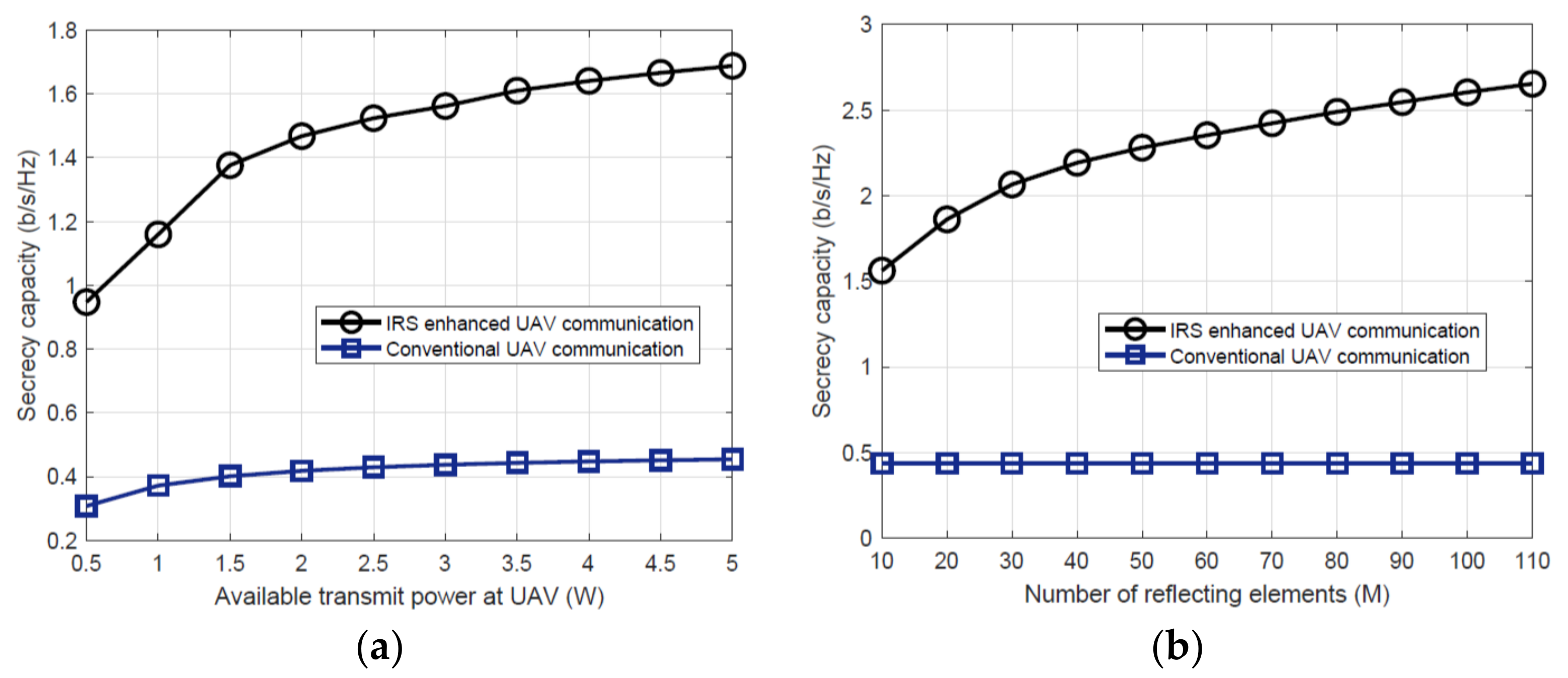
- The UAV communication links are always observable to potential eavesdroppers. Thus, reliability of communication links can be hampered by channel interference caused by these eavesdroppers. To compensate this issue, IRS can be involved to reduce external interference. In [28], the authors address IRS-assisted UAVs for two different applications in cellular networks: (i) to reduce the secrecy to avoid eavesdropping, and (ii) to maximize the average users’ achievable rate. Figure 3 shows IRS-assisted UAV communication in the presence of an eavesdropper. In this scenario, the potential eavesdropper can steal information of user and can cause other security concerns. Through IRS passive beamforming, it is possible to strengthen the reflected signals for the legitimate user as well as reduce the received SNR at the eavesdropper. Hence, we can improve the reliability and PLS for UAV communication. Similarly, airborne IRS can also offer a significant performance improvement for the intended user by optimizing UAV’s location and trajectory;
- ✓
- In UAV communication, energy consumption is a crucial factor due to limited payload and batteries. Some recent studies have addressed IRS-assisted UAV communication to tackle the energy consumption challenges. In [29,30], authors have focused on join optimization for UAV trajectory, power allocation and IRS phase shift in order to decrease the average energy consumption. Another study [31] introduces extended probabilistic LOS model to unlock the potentials of IRS-assisted UAV communication. In [32], authors consider a directional antenna on a cooperative UAV pointing towards IRS to reduce the energy consumption. We have summarized some existing studies on IRS-assisted UAV communications in Table 2.
1.2. Scope and Contributions
- We provide comprehensive review of advantages of this coexistence, and the use cases where this coexistence of UAVs and IRSs can be advantageous;
- We carry our extensive analysis to empower the use of this integration in several applications scenarios;
- In the end, we discuss several potential challenges and future research directions to further hones the research work dedicated to this promising integration of IRSs and UAVs.
1.3. Organization of the Paper
2. An Overview of IRS and UAV Technologies
2.1. IRS Technology
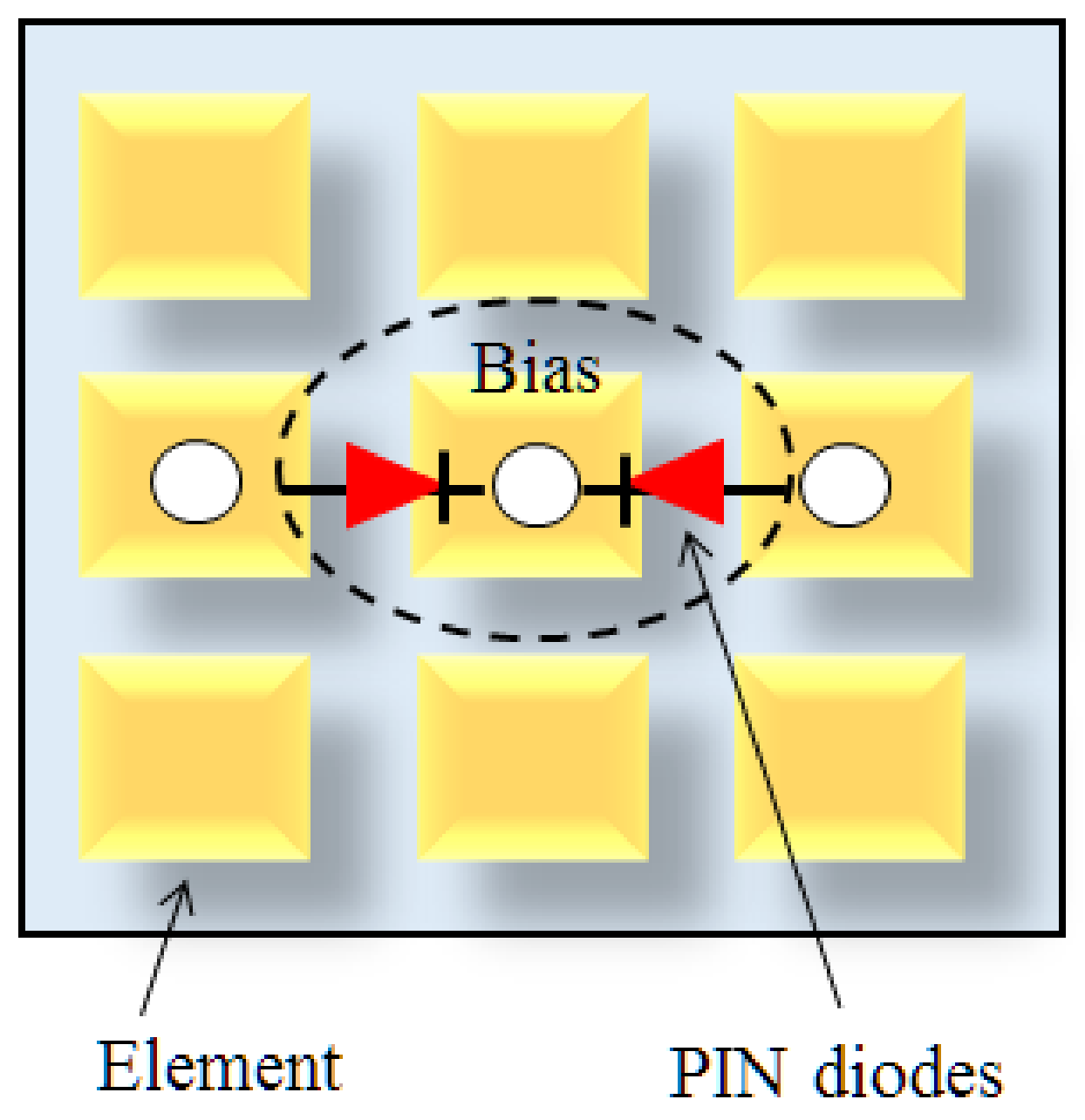
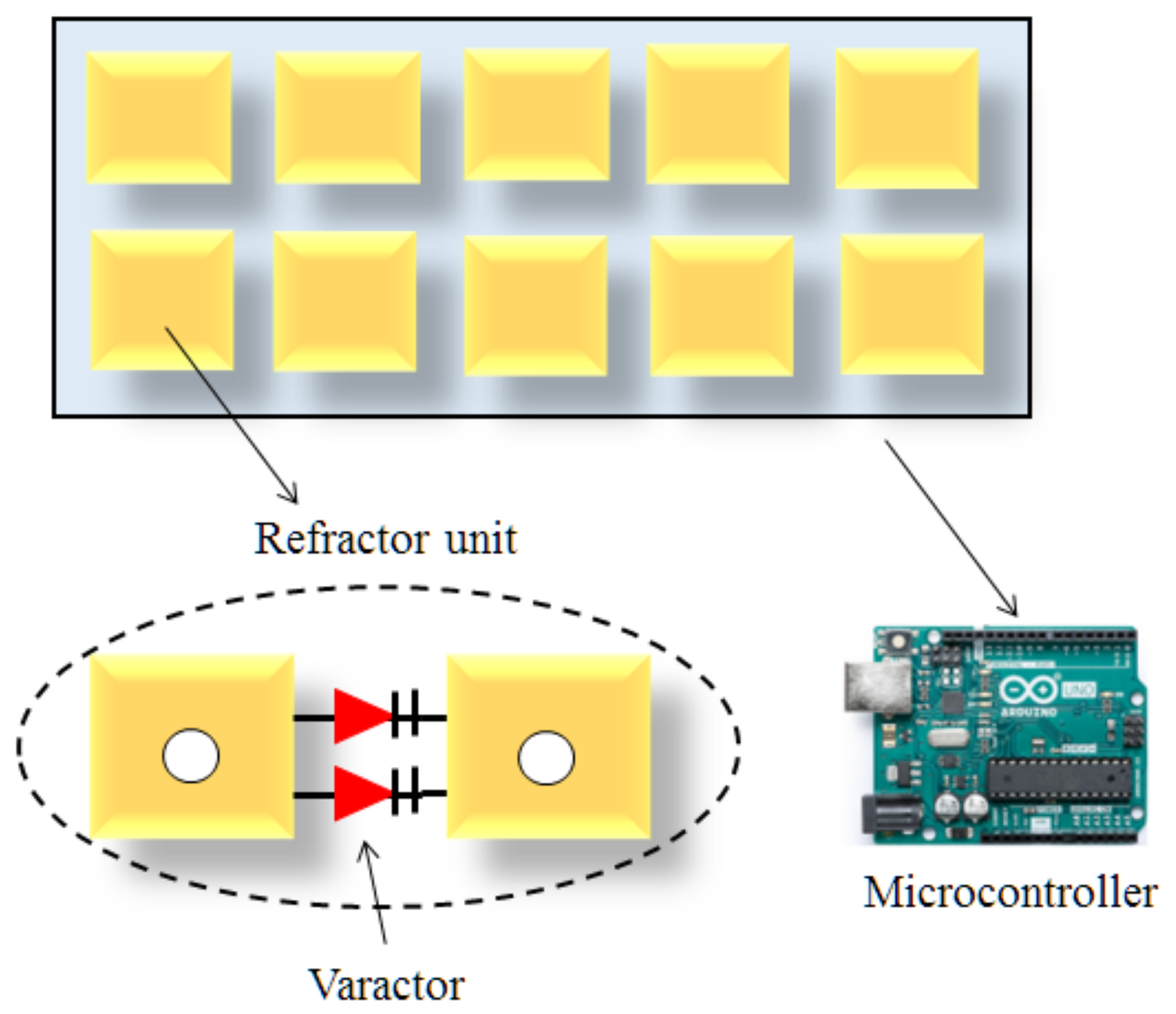
2.1.1. Basic Architecture of IRS
2.1.2. Working Principle
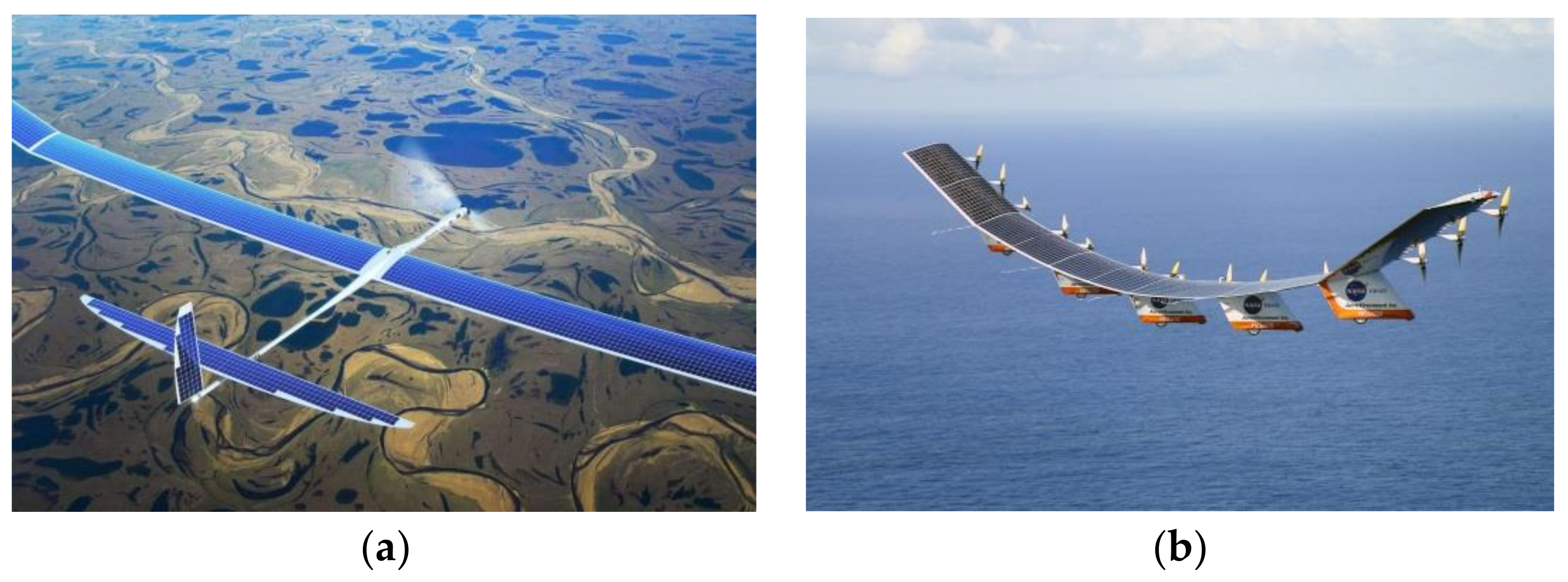
2.2. UAV Technology
3. Emerging Technologies
3.1. Machine Learning
Deep Learning
3.2. Mm-Wave and THz
3.3. Wireless Information and Power Transfer
3.4. Visible Light Communication (VLC)
3.5. Non-Orthogonal Multiple Access (NOMA)
- Firstly, NOMA ensures high flexibility and efficient resource allocation for IRS-assisted UAV communication as compared to traditional orthogonal multiple access (OMA). Thus, it can provide enhanced spectral efficiency as well as satisfying diversified communication demands of network users;
- Secondly, the traditional NOMA performs SIC decoding by considering strong and weak users on the basis of channel conditions. These channel conditions can be configured by controlling UAV’s mobility and IRS phase shift to empower a smart NOMA operation. This smart integration of technologies has been addressed in some recent studies. For instance, the authors [82] discuss NOMA to serve multiple users to attain a flexible and high coverage performance of a cellular network. This study analyzes optimal transmit power allocation between UAVs and two NOMA users to ensure flexible and ubiquitous NOMA transmission. In [83], the authors highlight the performance of IRS-assisted UAV NOMA system to serve multiple ground users. The authors discuss the potentials of integrating these three technologies to effectively improve the system performance.
3.6. Mobile Edge Computing (MEC)
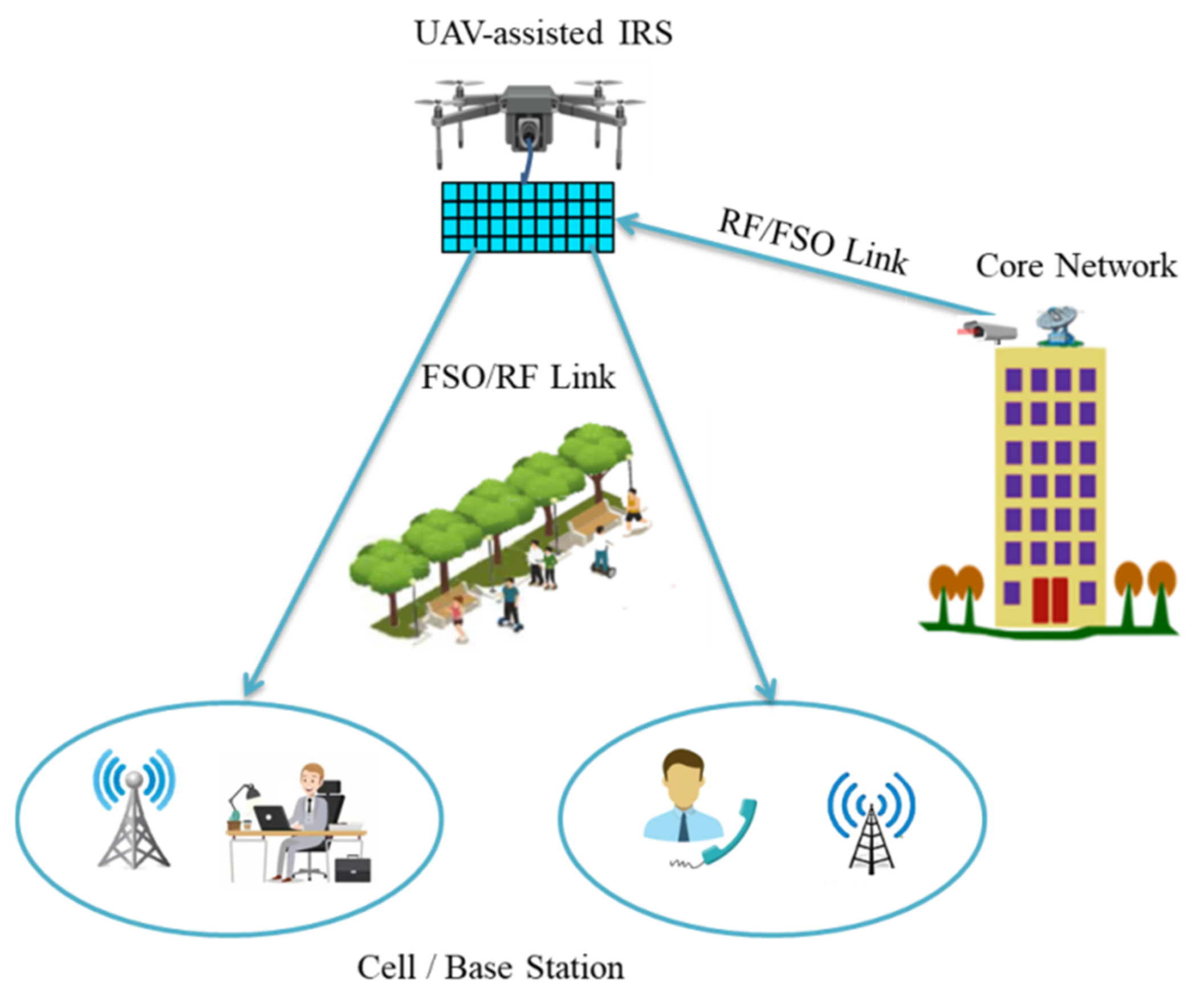
3.7. Free Space Optical (FSO) Communication
UAV-Based IRS-Assisted RF/FSO Communication
3.8. Internet of Things (IoT)
4. Applications of IRS-Assisted UAV Communication
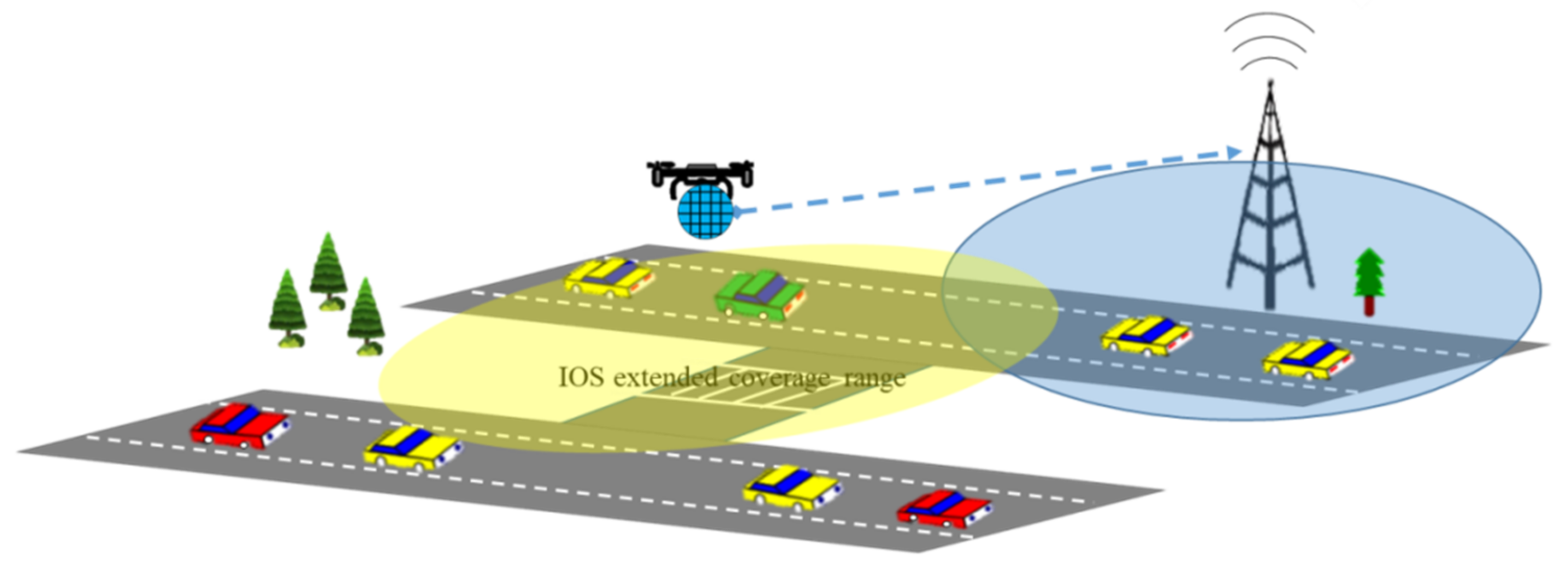
4.1. IRS-Assisted UAV Communications for Extended Coverage
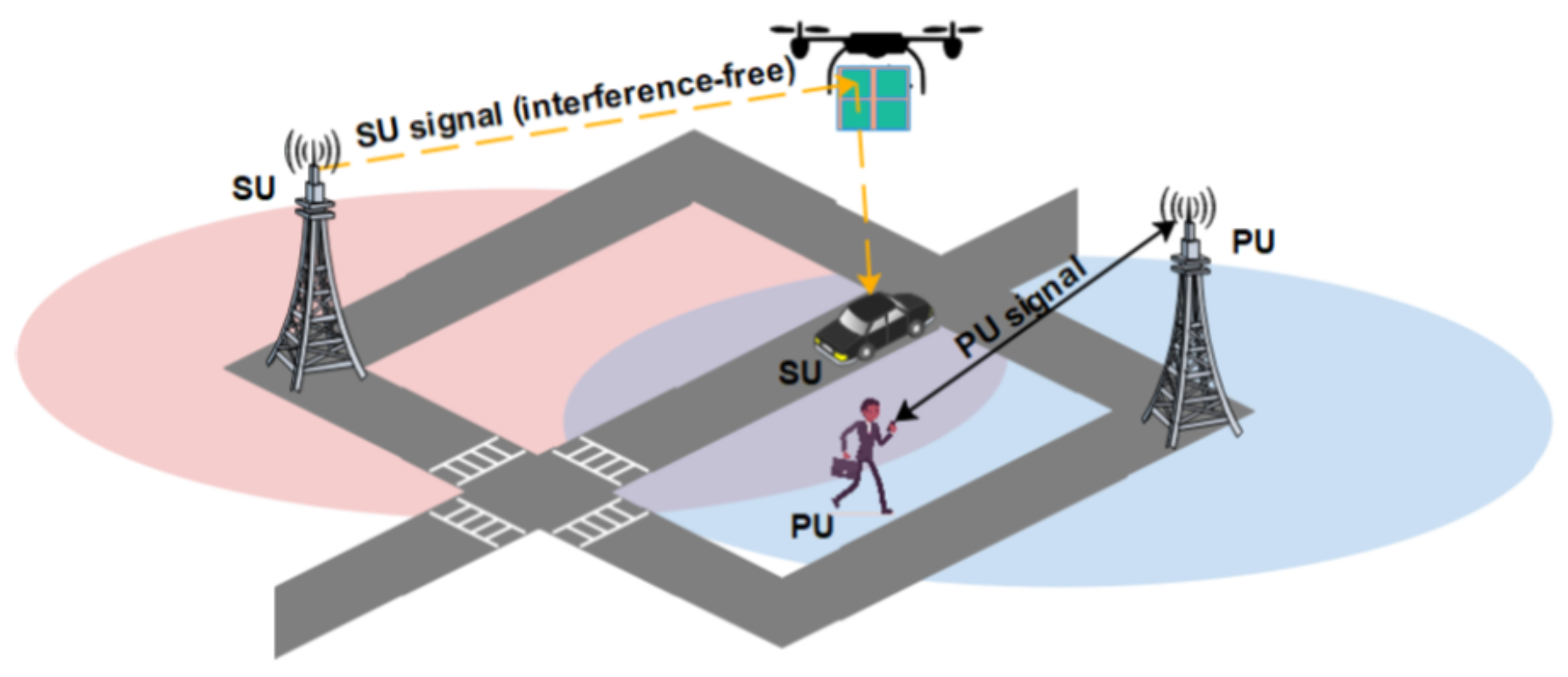
4.2. IRS-Assisted UAV Communications for Spectrum Sharing
4.3. IRS-Assisted UAV-Ground Wireless Networks
4.4. IRS Enhanced PLS for UAV Communications
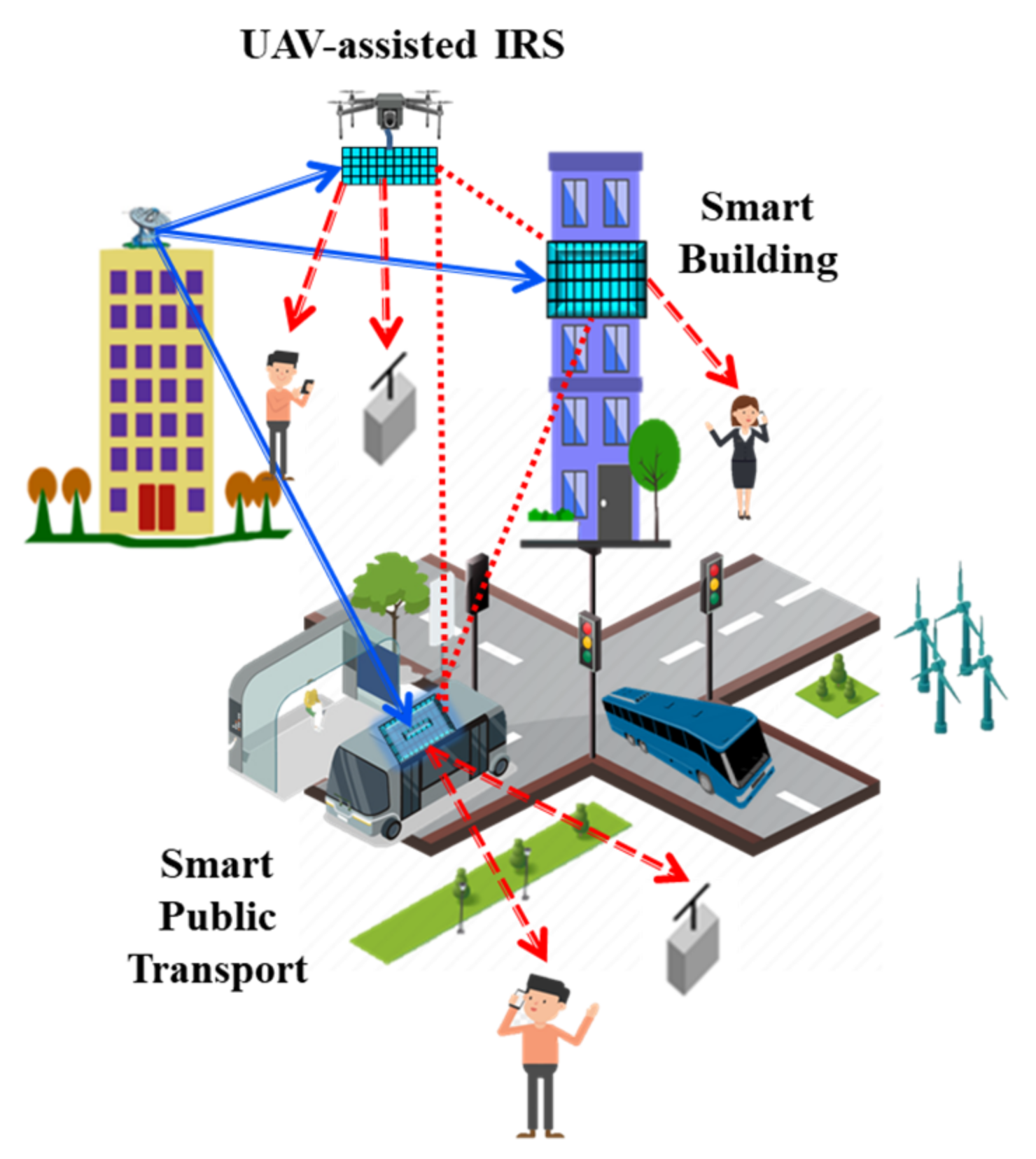
4.5. IRS-UAV Enabled Smart City
4.6. IRS-Assisted UAV Vehicular Communication
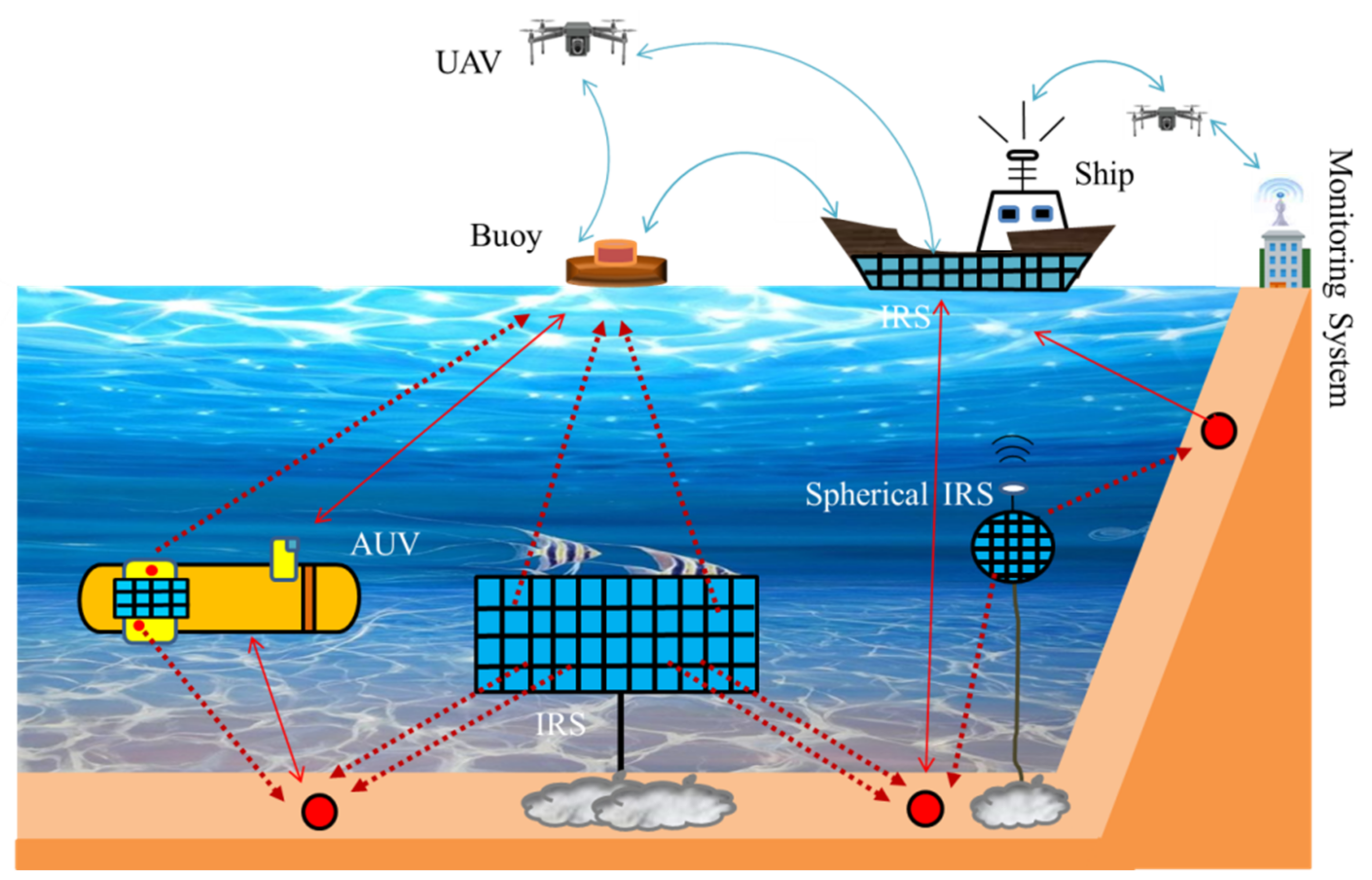
4.7. IRS-Assisted UAV Communication in IoUT
4.8. Cellular Connected UAVs
4.9. UAV Placement/Trajectory Optimization
4.10. IRS-Assisted UAV Communication in Underground Scenario
4.11. IRS-Assisted UAV Communication in Smart Industry
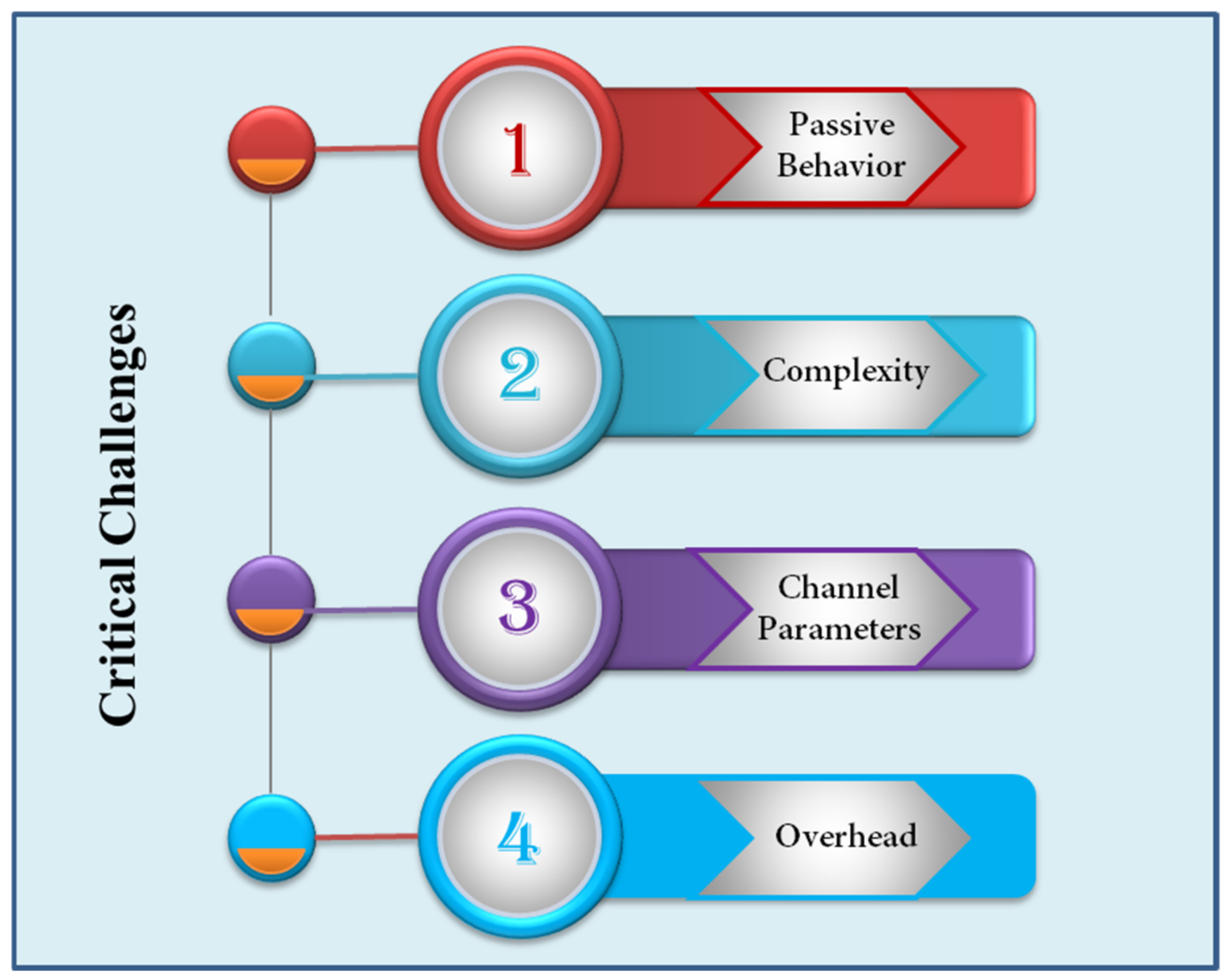
5. Open Challenges and Future Research Directions
5.1. Physics and EM Compliant Models
5.2. Channel Sensing and Estimation
5.3. Controller and Overhead of IRS
5.4. Power Consumption
5.5. Environmental Factors
5.6. Design of Suitable Security Measures
5.7. Machine Learning/Artificial Intelligence Techniques
5.8. Medium Access Control Layer
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Poor, H.V. Joint Optimization of IRS and UAV-Trajectory: For Supporting Statistical Delay and Error-Rate Bounded QoS Over mURLLC-Driven 6G Mobile Wireless Networks Using FBC. IEEE Veh. Technol. Mag. 2022, 17, 55–63. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV communication networks issues: A review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Vinogradov, E.; Sallouha, H.; De Bast, S.; Azari, M.M.; Pollin, S. Tutorial on UAVs: A Blue Sky View on Wireless Communication. arXiv 2019, arXiv:1901.02306. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. A Comprehensive Review of Micro UAV Charging Techniques. Micromachines 2022, 13, 977. [Google Scholar] [CrossRef]
- Yu, J.; Liu, X.; Gao, Y.; Zhang, C.; Zhang, W. Deep Learning for Channel Tracking in IRS-Assisted UAV Communication Systems. IEEE Trans. Wirel. Commun. 2022. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Intelligent Reflecting Surface Enhanced Wireless Network via Joint Active and Passive Beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2019, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Liang, Y.-C.; Pei, Y.; Guo, H. Intelligent Reflecting Surface: A Programmable Wireless Environment for Physical Layer Security. IEEE Access 2019, 7, 82599–82612. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, F.; Hu, R.Q.; Qian, Y. Energy Efficient Robust Beamforming and Cooperative Jamming Design for IRS-Assisted MISO Networks. IEEE Trans. Wirel. Commun. 2020, 20, 2592–2607. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.-C.; Di Renzo, M. Reconfigurable Intelligent Surface Assisted UAV Communication: Joint Trajectory Design and Passive Beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef] [Green Version]
- Ma, D.; Ding, M.; Hassan, M. Enhancing Cellular Communications for UAVs via Intelligent Reflective Surface. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Cai, Y.; Wei, Z.; Hu, S.; Ng, D.W.K.; Yuan, J. Resource allocation for power-efficient IRS-assisted UAV communications. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar]
- Hua, M.; Yang, L.; Wu, Q.; Pan, C.; Li, C.; Swindlehurst, A.L. UAV-Assisted Intelligent Reflecting Surface Symbiotic Radio System. IEEE Trans. Wirel. Commun. 2021, 20, 5769–5785. [Google Scholar] [CrossRef]
- Wu, Q.; Xu, J.; Zeng, Y.; Ng, D.W.K.; Al-Dhahir, N.; Schober, R.; Swindlehurst, A.L. A Comprehensive Overview on 5G-and-Beyond Networks with UAVs: From Communications to Sensing and Intelligence. IEEE J. Sel. Areas Commun. 2021, 39, 2912–2945. [Google Scholar] [CrossRef]
- Basharat, S.; Khan, M.; Iqbal, M.; Hashmi, U.; Zaidi, S.A.R.; Robertson, I. Exploring Reconfigurable Intelligent Surfaces for 6G: State-of-the-Art and the Road Ahead. IET Commun. 2022. [Google Scholar] [CrossRef]
- Mohamed, Z.; Aissa, S. Leveraging UAVs with Intelligent Reflecting Surfaces for Energy-Efficient Communications with Cell-Edge Users. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Ge, L.; Dong, P.; Zhang, H.; Wang, J.B.; You, X. Joint Beamforming and Trajectory Optimization for Intelligent Reflecting Surfaces-Assisted UAV Communications. IEEE Access 2020, 8, 78702–78712. [Google Scholar] [CrossRef]
- Fang, S.; Chen, G.; Li, Y. Joint Optimization for Secure Intelligent Reflecting Surface Assisted UAV Networks. IEEE Wirel. Commun. Lett. 2021, 10, 276–280. [Google Scholar] [CrossRef]
- Jiao, S.; Fang, F.; Zhou, X.; Zhang, H. Joint Beamforming and Phase Shift Design in Downlink UAV Networks with IRS-Assisted NOMA. J. Commun. Inf. Netw. 2020, 5, 138–149. [Google Scholar] [CrossRef]
- Zhang, Q.; Saad, W.; Bennis, M. Reflections in the Sky: Millimeter Wave Communication with UAV-Carried Intelligent Reflectors. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Abdalla, A.S.; Rahman, T.F.; Marojevic, V. UAVs with reconfigurable intelligent surfaces: Applications, challenges, and opportunities. arXiv 2020, arXiv:2012.04775. [Google Scholar]
- Pang, X.; Sheng, M.; Zhao, N.; Tang, J.; Niyato, D.; Wong, K.-K. When UAV Meets IRS: Expanding Air-Ground Networks via Passive Reflection. IEEE Wirel. Commun. 2021, 28, 164–170. [Google Scholar] [CrossRef]
- You, C.; Kang, Z.; Zeng, Y.; Zhang, R. Enabling Smart Reflection in Integrated Air-Ground Wireless Network: IRS Meets UAV. IEEE Wirel. Commun. 2021, 28, 138–144. [Google Scholar] [CrossRef]
- Lu, H.; Zeng, Y.; Jin, S.; Zhang, R. Aerial Intelligent Reflecting Surface: Joint Placement and Passive Beamforming Design with 3D Beam Flattening. IEEE Trans. Wirel. Commun. 2021, 20, 4128–4143. [Google Scholar] [CrossRef]
- Yang, L.; Meng, F.; Zhang, J.; Hasna, M.O.; Di Renzo, M. On the performance of RIS-assisted dual-hop UAV communication systems. IEEE Trans. Veh. Technol. 2020, 69, 10385–10390. [Google Scholar] [CrossRef]
- Brighente, A.; Conti, M.; Idriss, H.; Tomasin, S. Unmanned Aerial Vehicles Meet Reflective Intelligent Surfaces to Improve Coverage and Secrecy. arXiv 2022, arXiv:2205.02506. [Google Scholar]
- Liu, X.; Liu, Y.; Chen, Y. Machine Learning Empowered Trajectory and Passive Beamforming Design in UAV-RIS Wireless Networks. IEEE J. Sel. Areas Commun. 2020, 39, 2042–2055. [Google Scholar] [CrossRef]
- Nguyen, K.K.; Khosravirad, S.; Da Costa, D.B.; Nguyen, L.D.; Duong, T.Q. Reconfigurable Intelligent Sur-face-assisted Multi-UAV Networks: Efficient Resource Allocation with Deep Reinforcement Learning. IEEE J. Sel. Top. Signal Process. 2021, 16, 358–368. [Google Scholar] [CrossRef]
- Cho, H.; Choi, J. IRS-Aided Energy Efficient UAV Communication. arXiv 2021, arXiv:2108.02406. [Google Scholar]
- Tyrovolas, D.; Tegos, S.A.; Diamantoulakis, P.D.; Karagiannidis, G.K. Performance analysis of synergetic UAV-RIS communication networks. arXiv 2021, arXiv:2106.10034. [Google Scholar]
- Jiang, L.; Jafarkhani, H. Reconfigurable Intelligent Surface Assisted mmWave UAV Wireless Cellular Networks. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Guo, X.; Chen, Y.; Wang, Y. Learning-Based Robust and Secure Transmission for Reconfigurable Intelligent Surface Aided Millimeter Wave UAV Communications. IEEE Wirel. Commun. Lett. 2021, 10, 1795–1799. [Google Scholar] [CrossRef]
- Ranjha, A.; Kaddoum, G. URLLC Facilitated by Mobile UAV Relay and RIS: A Joint Design of Passive Beamforming, Blocklength, and UAV Positioning. IEEE Internet Things J. 2020, 8, 4618–4627. [Google Scholar] [CrossRef]
- Wang, L.; Wang, K.; Pan, C.; Xu, W.; Aslam, N. Joint trajectory and passive beamforming design for intelligent reflecting surface-aided UAV communications: A deep reinforcement learning approach. arXiv 2020, arXiv:2007.08380. [Google Scholar]
- Zhao, J. A survey of intelligent reflecting surfaces (IRSs): Towards 6G wireless communication networks with massive MIMO 2.0. arXiv 2019, arXiv:1907.04789. [Google Scholar]
- Tapio, V.; Hemadeh, I.; Mourad, A.; Shojaeifard, A.; Juntti, M. Survey on reconfigurable intelligent surfaces below 10 GHz. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 175. [Google Scholar] [CrossRef]
- Li, L.; Jun Cui, T.; Ji, W.; Liu, S.; Ding, J.; Wan, X.; Bo Li, Y.; Jiang, M.; Qiu, C.-W.; Zhang, S. Electromagnetic reprogrammable cod-ing-metasurface holograms. Nat. Commun. 2017, 8, 197. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, W.M.; Liu, A.Q.; Zhang, X.M.; Tsai, D.P.; Bourouina, T.; Teng, J.H.; Zhang, X.H.; Guo, H.C.; Tanoto, H.; Mei, T.; et al. Switchable Magnetic Metamaterials Using Micromachining Processes. Adv. Mater. 2011, 23, 1792–1796. [Google Scholar] [CrossRef] [PubMed]
- Driscoll, T.; Kim, H.T.; Chae, B.G.; Kim, B.J.; Lee, Y.W.; Jokerst, N.M.; Palit, S.; Smith, D.R.; Di Ventra, M.; Basov, D.N. Memory metamaterials. Science 2009, 325, 1518–1521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Komar, A.; Paniagua-Domínguez, R.; Miroshnichenko, A.E.; Yu, Y.F.; Kivshar, Y.S.; Kuznetsov, A.I.; Neshev, D.N. Dynamic Beam Switching by Liquid Crystal Tunable Dielectric Metasurfaces. ACS Photonics 2018, 5, 1742–1748. [Google Scholar] [CrossRef] [Green Version]
- Miao, Z.; Wu, Q.; Li, X.; He, Q.; Ding, K.; An, Z.; Zhang, Y.; Zhou, L. Widely Tunable Terahertz Phase Modulation with Gate-Controlled Graphene Metasurfaces. Phys. Rev. X 2015, 5, 041027. [Google Scholar] [CrossRef] [Green Version]
- Shcherbakov, M.R.; Liu, S.; Zubyuk, V.V.; Vaskin, A.; Vabishchevich, P.P.; Keeler, G.; Pertsch, T.; Dolgova, T.V.; Staude, I.; Brener, I.; et al. Ultrafast all-optical tuning of direct-gap semiconductor metasurfaces. Nat. Commun. 2017, 8, 17. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Intelligent Reflecting Surface Enhanced Wireless Network: Joint Active and Passive Beamforming Design. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Bjornson, E.; Ozdogan, O.; Larsson, E.G. Intelligent Reflecting Surface Versus Decode-and-Forward: How Large Surfaces are Needed to Beat Relaying? IEEE Wirel. Commun. Lett. 2019, 9, 244–248. [Google Scholar] [CrossRef] [Green Version]
- Alghamdi, R.; Alhadrami, R.; Alhothali, D.; Almorad, H.; Faisal, A.; Helal, S.; Shalabi, R.; Asfour, R.; Hammad, N.; Shams, A.; et al. Intelligent Surfaces for 6G Wireless Networks: A Survey of Optimization and Performance Analysis Techniques. IEEE Access 2020, 8, 202795–202818. [Google Scholar] [CrossRef]
- VisoSurf. Available online: https://www.visorsurf.eu/ (accessed on 8 April 2022).
- Chen, K.; Feng, Y.; Monticone, F.; Zhao, J.; Zhu, B.; Jiang, T.; Zhang, L.; Kim, Y.; Ding, X.; Zhang, S.; et al. A Reconfigurable Active Huygens’ Metalens. Adv. Mater. 2017, 29, 1606422. [Google Scholar] [CrossRef] [Green Version]
- NTT DOCOMO and Metawave Announce Successful Demonstration of 28GHz-Band 5G Using World’s First Meta-Structure Technology. Available online: https://www.businesswire.com/news/home/20181204005253/en/NTT-DOCOMO-and-Metawave-Announce-Successful-Demonstration-of-28GHz-Band-5G-Using-Worlds-First-Meta-Structure-Technology (accessed on 8 April 2022).
- Tech Explorist. Available online: https://www.techexplorist.com/mit-inexpensive-rforce-amplify-wi-fi-signal-ten-times/29708/ (accessed on 8 April 2022).
- Tang, W.; Dai, J.Y.; Chen, M.Z.; Wong, K.-K.; Li, X.; Zhao, X.; Jin, S.; Cheng, Q.; Cui, T.J. MIMO Transmission through Reconfigurable Intelligent Surface: System Design, Analysis, and Implementation. IEEE J. Sel. Areas Commun. 2020, 38, 2683–2699. [Google Scholar] [CrossRef]
- Reconfigurable Intelligent Surface (RIS)-Assisted Wireless Networks. Available online: https://spcc.committees.comsoc.org/files/2021/06/RIS-YC-SPCE-SIG-2021-06-2.pdf (accessed on 8 April 2022).
- Lin, N.; Fu, L.; Zhao, L.; Min, G.; Al-Dubai, A.; Gacanin, H. A Novel Multimodal Collaborative Drone-Assisted VANET Networking Model. IEEE Trans. Wirel. Commun. 2020, 19, 4919–4933. [Google Scholar] [CrossRef]
- Lin, N.; Liu, Y.; Zhao, L.; Wu, D.O.; Wang, Y. An Adaptive UAV Deployment Scheme for Emergency Net-working. IEEE Trans. Wirel. Commun. 2021, 21, 2383–2398. [Google Scholar] [CrossRef]
- Shin, M.; Kim, J.; Levorato, M. Auction-Based Charging Scheduling with Deep Learning Framework for Multi-Drone Networks. IEEE Trans. Veh. Technol. 2019, 68, 4235–4248. [Google Scholar] [CrossRef] [Green Version]
- Ullah, Z.; Al-Turjman, F.; Mostarda, L. Cognition in UAV-Aided 5G and Beyond Communications: A Survey. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 872–891. [Google Scholar] [CrossRef]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and Privacy Issues of UAV: A Survey. Mob. Netw. Appl. 2020, 25, 95–101. [Google Scholar] [CrossRef]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021, in press. [Google Scholar] [CrossRef]
- Song, Q.; Zeng, Y.; Xu, J.; Jin, S. A survey of prototype and experiment for UAV communications. Sci. China Inf. Sci. 2021, 64, 140301. [Google Scholar] [CrossRef]
- Srivastava, S.; Narayan, S.; Mittal, S. A survey of deep learning techniques for vehicle detection from UAV images. J. Syst. Archit. 2021, 117, 102152. [Google Scholar] [CrossRef]
- Haider, S.K.; Nauman, A.; Jamshed, M.A.; Jiang, A.; Batool, S.; Kim, S.W. Internet of Drones: Routing Algorithms, Techniques and Challenges. Mathematics 2022, 10, 1488. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Task assignment algorithms for unmanned aerial vehicle networks: A comprehensive survey. Veh. Commun. 2022, 35, 100469. [Google Scholar] [CrossRef]
- Solar Tribune. Available online: https://solartribune.com/solar-powered-drones/ (accessed on 8 April 2022).
- Feng, K.; Wang, Q.; Li, X.; Wen, C.-K. Deep Reinforcement Learning Based Intelligent Reflecting Surface Optimization for MISO Communication Systems. IEEE Wirel. Commun. Lett. 2020, 9, 745–749. [Google Scholar] [CrossRef]
- Nguyen, K.K.; Vien, N.A.; Nguyen, L.D.; Le, M.-T.; Hanzo, L.; Duong, T.Q. Real-Time Energy Harvesting Aided Scheduling in UAV-Assisted D2D Networks Relying on Deep Reinforcement Learning. IEEE Access 2021, 9, 3638–3648. [Google Scholar] [CrossRef]
- Huang, C.; Mo, R.; Yuen, C. Reconfigurable intelligent surface assisted multiuser MISO systems exploiting deep reinforcement learning. IEEE J. Select. Areas Commun. 2020, 38, 1839–1850. [Google Scholar] [CrossRef]
- Shokry, M.; Elhattab, M.; Assi, C.; Sharafeddine, S.; Ghrayeb, A. Optimizing age of information through aerial reconfig-urable intelligent surfaces: A deep reinforcement learning approach. IEEE Trans. Veh. Technol. 2021, 70, 3978–3983. [Google Scholar]
- Mei, H.; Yang, K.; Liu, Q.; Wang, K. 3D-Trajectory and Phase-Shift Design for RIS-Assisted UAV Systems Using Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2022, 71, 3020–3029. [Google Scholar] [CrossRef]
- Cao, X.; Yang, B.; Huang, C.; Yuen, C.; Di Renzo, M.; Niyato, D.; Han, Z. Reconfigurable Intelligent Surface-Assisted Aerial-Terrestrial Communications via Multi-Task Learning. IEEE J. Sel. Areas Commun. 2021, 39, 3035–3050. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Han, C.; Nie, S. Combating the Distance Problem in the Millimeter Wave and Terahertz Frequency Bands. IEEE Commun. Mag. 2018, 56, 102–108. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.; Wang, K.; Pan, C.; Zhu, H.; Wang, J. Sum-Rate Maximization for Intelligent Reflecting Surface Assisted Terahertz Communications. IEEE Trans. Veh. Technol. 2022, 71, 3320–3325. [Google Scholar] [CrossRef]
- Chaccour, C.; Soorki, M.N.; Saad, W.; Bennis, M.; Popovski, P. Risk-Based Optimization of Virtual Reality over Terahertz Reconfigurable Intelligent Surfaces. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020. [Google Scholar] [CrossRef]
- Pan, Y.; Wang, K.; Pan, C.; Zhu, H.; Wang, J. UAV-Assisted and Intelligent Reflecting Surfaces-Supported Terahertz Communications. IEEE Wirel. Commun. Lett. 2021, 10, 1256–1260. [Google Scholar] [CrossRef]
- Sun, G.; Tao, X.; Li, N.; Xu, J. Intelligent Reflecting Surface and UAV Assisted Secrecy Communication in Millimeter-Wave Networks. IEEE Trans. Veh. Technol. 2021, 70, 11949–11961. [Google Scholar] [CrossRef]
- Guo, K.; Wang, C.; Li, Z.; Ng, D.W.K.; Wong, K.-K. Multiple UAV-Borne IRS-Aided Millimeter Wave Multicast Communications: A Joint Optimization Framework. IEEE Commun. Lett. 2021, 25, 3674–3678. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, X.; Jia, L.; Wu, Y.; Shu, F.; Wang, J. Enhanced Secure Wireless Information and Power Transfer via Intelligent Reflecting Surface. IEEE Commun. Lett. 2020, 25, 1084–1088. [Google Scholar] [CrossRef]
- Liu, Y.; Han, F.; Zhao, S. Flexible and Reliable Multiuser SWIPT IoT Network Enhanced by UAV-Mounted Intelligent Reflecting Surface. IEEE Trans. Reliab. 2022, 71, 1092–1103. [Google Scholar] [CrossRef]
- Li, Z.; Chen, W.; Cao, H.; Tang, H.; Wang, K.; Li, J. Intelligent Reflecting Surface Empowered UAV SWIPT Networks. arXiv 2021, arXiv:2107.11016. [Google Scholar]
- Yu, K.; Yu, X.; Cai, J. UAVs Assisted Intelligent Reflecting Surfaces SWIPT System with Statistical CSI. IEEE J. Sel. Top. Signal Process. 2021, 15, 1095–1109. [Google Scholar] [CrossRef]
- Liu, C.-H.; Syed, A.; Wei, L. Toward Ubiquitous and Flexible Coverage of UAV-IRS-Assisted NOMA Networks. arXiv 2021, arXiv:2110.04699. [Google Scholar]
- Solanki, S.; Park, J.; Lee, I. On the Performance of IRS-Aided UAV Networks with NOMA. IEEE Trans. Veh. Technol. 2022. [Google Scholar] [CrossRef]
- Dai, L.; Wang, B.; Wang, M.; Yang, X.; Tan, J.; Bi, S.; Xu, S.; Yang, F.; Chen, Z.; Di Renzo, M.; et al. Reconfigurable Intelligent Surface-Based Wireless Communications: Antenna Design, Prototyping, and Experimental Results. IEEE Access 2020, 8, 45913–45923. [Google Scholar] [CrossRef]
- Jiang, T.; Shi, Y. Over-the-Air Computation via Intelligent Reflecting Surfaces. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Hua, S.; Shi, Y. Reconfigurable Intelligent Surface for Green Edge Inference in Machine Learning. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Hua, S.; Zhou, Y.; Yang, K.; Shi, Y.; Wang, K. Reconfigurable Intelligent Surface for Green Edge Inference. IEEE Trans. Green Commun. Netw. 2021, 5, 964–979. [Google Scholar] [CrossRef]
- He, C.; Xiao, J. Joint Optimization in Intelligent Reflecting Surface-Aided UAV Communication for Multiaccess Edge Computing. Wirel. Commun. Mob. Comput. 2022, 2022, 5415562. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, X. IRS/UAV-Based Edge-Computing/Traffic-Offloading Over RF-Powered 6G Mobile Wireless Networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1272–1277. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Mazinani, A.; Sadiq, H.B.; Amjad, H. A survey of optical wireless technologies: Practical considerations, impairments, security issues and future research directions. Opt. Quantum Electron. 2022, 54, 1–57. [Google Scholar] [CrossRef]
- Jia, H.; Zhong, J.; Janardhanan, M.N.; Chen, G. Ergodic Capacity Analysis for FSO Communications with UAV-Equipped IRS in the Presence of Pointing Error. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 949–954. [Google Scholar] [CrossRef]
- Malik, S.; Saxena, P.; Chung, Y.H. Performance analysis of a UAV-based IRS-assisted hybrid RF/FSO link with pointing and phase shift errors. J. Opt. Commun. Netw. 2022, 14, 303–315. [Google Scholar] [CrossRef]
- Xu, J.; Kang, X.; Zhang, R.; Liang, Y.C. Joint Power and Trajectory Optimization for IRS-aided Master-Auxiliary-UAV-powered IoT Networks. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Mahmoud, A.; Muhaidat, S.; Sofotasios, P.C.; Abualhaol, I.; Dobre, O.A.; Yanikomeroglu, H. Intelligent Reflecting Surfaces Assisted UAV Communications for IoT Networks: Performance Analysis. IEEE Trans. Green Commun. Netw. 2021, 5, 1029–1040. [Google Scholar] [CrossRef]
- Tan, X.; Sun, Z.; Jornet, J.M.; Pados, D. Increasing indoor spectrum sharing capacity using smart reflect-array. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Khan, W.U.; Lagunas, E.; Ali, Z.; Javed, M.A.; Ahmed, M.; Chatzinotas, S.; Ottersten, B.; Popovski, P. Opportunities for Physical Layer Security in UAV Communication Enhanced with Intelligent Reflective Surfaces. arXiv 2022, arXiv:2203.16907. [Google Scholar]
- Wang, W.; Tian, H.; Ni, W.; Hua, M. Intelligent reflecting surface aided secure UAV communications. arXiv 2020, arXiv:2011.04339. [Google Scholar]
- Long, H.; Chen, M.; Yang, Z.; Li, Z.; Wang, B.; Yun, X.; Shikh-Bahaei, M. Joint Trajectory and Passive Beamforming Design for Secure UAV Networks with RIS. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Di Renzo, M.; Tao, M.; Yuan, X. Robust Secure UAV Communications With the Aid of Reconfigurable Intelligent Surfaces. IEEE Trans. Wirel. Commun. 2021, 20, 6402–6417. [Google Scholar] [CrossRef]
- Fang, J.; Yang, Z.; Anjum, N.; Hu, Y.; Asgari, H.; Shikh-Bahaei, M. Secure Intelligent Reflecting Surface Assisted UAV Communication Networks. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Di Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.-S.; Yuen, C.; de Rosny, J.; Tretyakov, S. Smart Radio Environments Empowered by Reconfigurable Intelligent Surfaces: How It Works, State of Research, and The Road Ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Kisseleff, S.; Martins, W.A.; Al-Hraishawi, H.; Chatzinotas, S.; Ottersten, B. Reconfigurable Intelligent Surfaces for Smart Cities: Research Challenges and Opportunities. IEEE Open J. Commun. Soc. 2020, 1, 1781–1797. [Google Scholar] [CrossRef]
- Choi, J.; Va, V.; Gonzalez-Prelcic, N.; Daniels, R.; Bhat, C.R.; Heath, R.W. Millimeter-Wave Vehicular Communication to Support Massive Automotive Sensing. IEEE Commun. Mag. 2016, 54, 160–167. [Google Scholar] [CrossRef] [Green Version]
- Makarfi, A.U.; Rabie, K.M.; Kaiwartya, O.; Adhikari, K.; Li, X.; Quiroz-Castellanos, M.; Kharel, R. Reconfigurable intelligent surfaces-enabled vehicular networks: A physical layer security perspective. arXiv 2020, arXiv:2004.11288. [Google Scholar]
- Wang, J.; Zhang, W.; Bao, X.; Song, T.; Pan, C. Outage Analysis for Intelligent Reflecting Surface Assisted Vehicular Communication Networks. arXiv 2020, arXiv:2004.08063. [Google Scholar]
- Mohsan, S.A.H.; Mazinani, A.; Othman, N.Q.H.; Amjad, H. Towards the internet of underwater things: A comprehensive survey. Earth Sci. Inform. 2022, 15, 735–764. [Google Scholar] [CrossRef]
- Kisseleff, S.; Chatzinotas, S.; Ottersten, B. Reconfigurable intelligent surfaces in challenging environments: Underwater, underground, industrial and disaster. IEEE Access 2021, 9, 150214–150233. [Google Scholar] [CrossRef]
- Pang, X.; Mei, W.; Zhao, N.; Zhang, R. Intelligent Reflecting Surface Assisted Interference Mitigation for Cellular-Connected UAV. IEEE Wirel. Commun. Lett. 2022. [Google Scholar] [CrossRef]
- Hrovat, A.; Kandus, G.; Javornik, T. A Survey of Radio Propagation Modeling for Tunnels. IEEE Commun. Surv. Tutor. 2013, 16, 658–669. [Google Scholar] [CrossRef]
- Chen, C.; Pan, C. Blocking Probability in Obstructed Tunnels with Reconfigurable Intelligent Surface. IEEE Commun. Lett. 2021, 26, 458–462. [Google Scholar] [CrossRef]
- Rahim, N.A.; Firyaguna, F.; John, J.; Khyam, M.O.; Armstrong, D.P.E.; Claussen, H.; Poor, H.V. Towards Industry 5.0: Intelligent Reflecting Surface (IRS) in Smart Manufacturing. arXiv 2022, arXiv:2201.02214. [Google Scholar]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.S.; Zhang, R. Wireless communications through re-configurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Aim | Optimization Variable | UAV Mobility | IRS Installation |
|---|---|---|---|---|
| [12] | To maximize the average achievable rate | UAV trajectory, IRS passive beamforming, | Mobile | At the building |
| [15] | To maximize the IRS data transmission | IRS scheduling, IRS phase shift, UAV trajectory | Mobile | At the building |
| [19] | To maximize the received power | IRS passive beamforming, beamforming and trajectory of UAV | Mobile | At the building |
| [20] | To maximize the secrecy rate | IRS phase shift, power control of UAV, trajectory | Mobile | At the building |
| [21] | To maximize the rate of strong user | Location, phase shift and beamforming of IRS-UAV | Static | At the UAV |
| [22] | To maximize the transmission capacity | Reflection and location parameters of IRS-UAV | Static | At the UAV |
| Reference | System Components | Channel Model | Design Characteristics | Metric |
|---|---|---|---|---|
| [13] | UAV, IRS, user | Line-of-sight | UAV trajectory and velocity, IRS phase shift | Average total power consumption |
| [15] | UAV, IRS, BS | Rician | UAV trajectory, IRS scheduling, IRS phase shift matrix | weighted sum BER minimization |
| [19] | UAV, IRS, user | Rician, Raleigh, LOS | UAV trajectory, IRS phase shift, linear precoding | Signal-to-noise-ratio (SNR) |
| [20] | UAV, IRS, user | Rayleigh, free-space pathloss | UAV trajectory, IRS phase shift, linear precoding | Average capacity, average BER, Outage probability |
| [29] | UAV, IRS, mobile users | 3GPP | UAV trajectory, IRS phase shift, precoding | Energy consumption minimization |
| [31] | UAV, IRS, user | Rician | UAV trajectory, IRS phase shift | Average energy consumption |
| [33] | UAV, IRS, user | Multipath channel | UAV trajectory, IRS phase shift, precoding, analogue beamforming, user scheduling | Sum rate |
| [34] | UAV, IRS, user | mmWave channel | UAV trajectory, IRS phase shift, precoding | Sum secrecy rate |
| [35] | UAV, IRS, user | Rician, LOS | UAV trajectory, IRS phase shift | Bit-error-rate (BER) |
| [36] | UAV, IRS, user | mmWave channel | UAV trajectory, IRS phase shift | Weighted data rate and geographical fairness |
| Reference | Tuning Technique | Material | Characteristics | Spectrum | Modulation Range/Speed |
|---|---|---|---|---|---|
| [39] | Capacitance | PIN diode/varactor | Reprogrammable Hologram/Tunable lens | MHz-GHz | NA/100 KHz |
| [40] | Mechanics | NEMS/MEMS | Modulator | GHz-visible | 31%/1 KHz |
| [41] | Phase transition | VO2 | Modulator | THz-visible | 20%/NA |
| [42] | Phase transition | Liquid crystals | Color filter/beam deflector/modulator | GHz-visible | 12°/NA |
| [43] | Carrier doping | Graphene | Absorber/polarizer | THz-NIR | 243°/NA |
| [44] | Carrier doping | Semiconductors | Modulator | THz-visible | 90%/NA |
| Year & Reference | Research Project | Aim/Objective | Product |
|---|---|---|---|
| 2017 [48] | VisorSurf | It aims to develop a hardware architecture for software-driven metasurface |  |
| 2017 [49] | Reconfigureable active Hygen’s metalens | To achieve efficient manipulation of the impinging wavefront |  |
| 2018 [50] | NTT DOCOMO and Metawave | To support 5G data transmission of 28 GHz-band using metasurfaces reflectarray |  |
| 2020 [51] | Rfocus | Largest number of antennas used for for a single link communication |  |
| 2020 [52] | RIS-based MIMO QAM | To demonstrate an RIS framework to attain amplitude-and-phase-varying modulation, which supports the architecture of MIMO quadrature amplitude modulation (QAM) transmission. |  |
| 2020 [53] | NTT DOCOMO and AGC Inc. | It aims to design first ever prototype of transparent dynamic metasurface for 5G. |  |
| Reference | Year | Research Focus |
|---|---|---|
| [57] | 2020 | This study focuses on UAV applications, challenges, regulations, and future research aspects. Specifically, it highlights issues regarding trajectory, energy harvesting, security, interference and collision avoidance. |
| [58] | 2020 | This study is focused on UAVs for three different perspectives including swarms, sensors and communications. |
| [59] | 2020 | This study focuses on several application scenarios of multi-UAV systems. Additionally, it highlights nomenclature taxonomy, architecture, current trends and potential challenges. |
| [60] | 2021 | This article comprehensively surveys green UAV communications, energy consumption models, applications, common trends and research challenges. |
| [61] | 2021 | This article focuses on UAV prototype, experimental demonstration, channel models and energy consumption models. Moreover, it also outlines various future research directions for UAVs. |
| [62] | 2021 | This work is based on deep learning tools to detect vehicles using UAV aerial images. It addresses optimization methods, reduction of computation overhead and accuracy enhancement. This work provides guidelines for researchers in artificial intelligence and traffic surveillance domains. |
| [63] | 2022 | This study focuses on optimization algorithms e.g., Chicken Swarm Optimization Clustering, bee optimization algorithm, and genetic algorithm which are the gateway to better reliability, performance and accuracy. It also addresses protocols, routing schemes and associated challenges. |
| [64] | 2022 | This study surveys various task assignment algorithms in the context of main ideas, benefits, drawbacks and operational features. These algorithms are compared on the basis of performance factors and characteristics. This study also discusses challenges, open issues, and possible future research directions. |
| PLS Aspect | UAV Aspect | IRS Aspect | Scenario | Results |
|---|---|---|---|---|
| Maximize secrecy rate [20] | Power control, trajectory control | Phase shift control | Single eavesdropper, UAV to single receiver | Enhanced secrecy rate |
| Maximize secrecy rate [76] | Position design, Beamforming design | Position design, beamforming design | Single eavesdropper, UAV BS to receiver | Enhanced secrecy rate |
| Maximize secrecy rate [97] | Position design, power control | Phase shift control | Single eavesdropper, UAV to ground user | Enhanced secrecy rate |
| Maximize secure EE [98] | Trajectory design, power control | User association, phase shift control | Single eavesdropper, IRS equipped UAV, BS to users | Enhanced secure EE |
| Maximize secrecy rate [99] | Trajectory design | Beamforming design | Single eavesdropper, UAV to ground user | Enhanced secrecy rate |
| Maximize secrecy rate [100] | Position design | Phase shift control | Single eavesdropper, BS to users | Enhanced secrecy rate |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohsan, S.A.H.; Khan, M.A.; Alsharif, M.H.; Uthansakul, P.; Solyman, A.A.A. Intelligent Reflecting Surfaces Assisted UAV Communications for Massive Networks: Current Trends, Challenges, and Research Directions. Sensors 2022, 22, 5278. https://doi.org/10.3390/s22145278
Mohsan SAH, Khan MA, Alsharif MH, Uthansakul P, Solyman AAA. Intelligent Reflecting Surfaces Assisted UAV Communications for Massive Networks: Current Trends, Challenges, and Research Directions. Sensors. 2022; 22(14):5278. https://doi.org/10.3390/s22145278
Chicago/Turabian StyleMohsan, Syed Agha Hassnain, Muhammad Asghar Khan, Mohammed H. Alsharif, Peerapong Uthansakul, and Ahmed A. A. Solyman. 2022. "Intelligent Reflecting Surfaces Assisted UAV Communications for Massive Networks: Current Trends, Challenges, and Research Directions" Sensors 22, no. 14: 5278. https://doi.org/10.3390/s22145278