
Transformer Feature Enhancement Network with Template Update for Object Tracking



Abstract
:1. Introduction
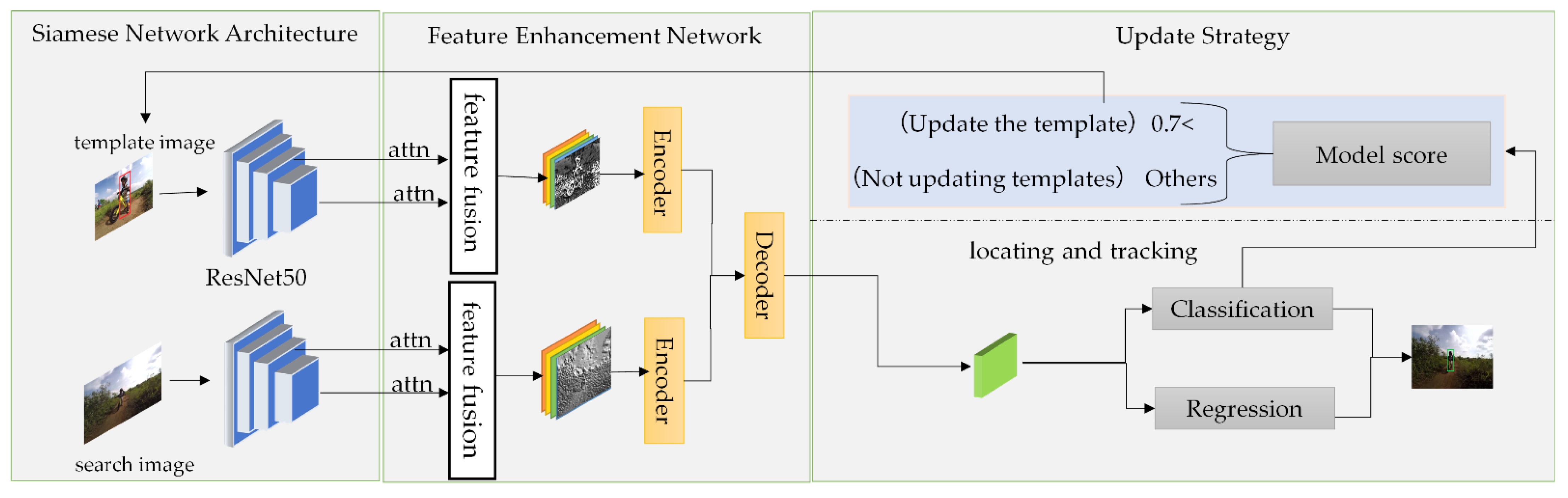
- In this paper, a feature enhancement module is designed to enhance the spatial–temporal and channel-wise saliency of the features extracted from the benchmark network, which can make the tracker automatically focus on the beneficial feature information and improve the feature characterization ability.
- In this paper, a template update strategy is introduced. By dynamically updating the target template, the impact of target appearance changes on the tracker is better mitigated.
- In this paper, the proposed tracking algorithm achieves state-of-the-art tracking performance on three challenging benchmarks, OTB100, LaSOT, and GOT-10k.
2. Problem Description
3. Transformer Feature Enhancement Network and Template Update for Object Tracking
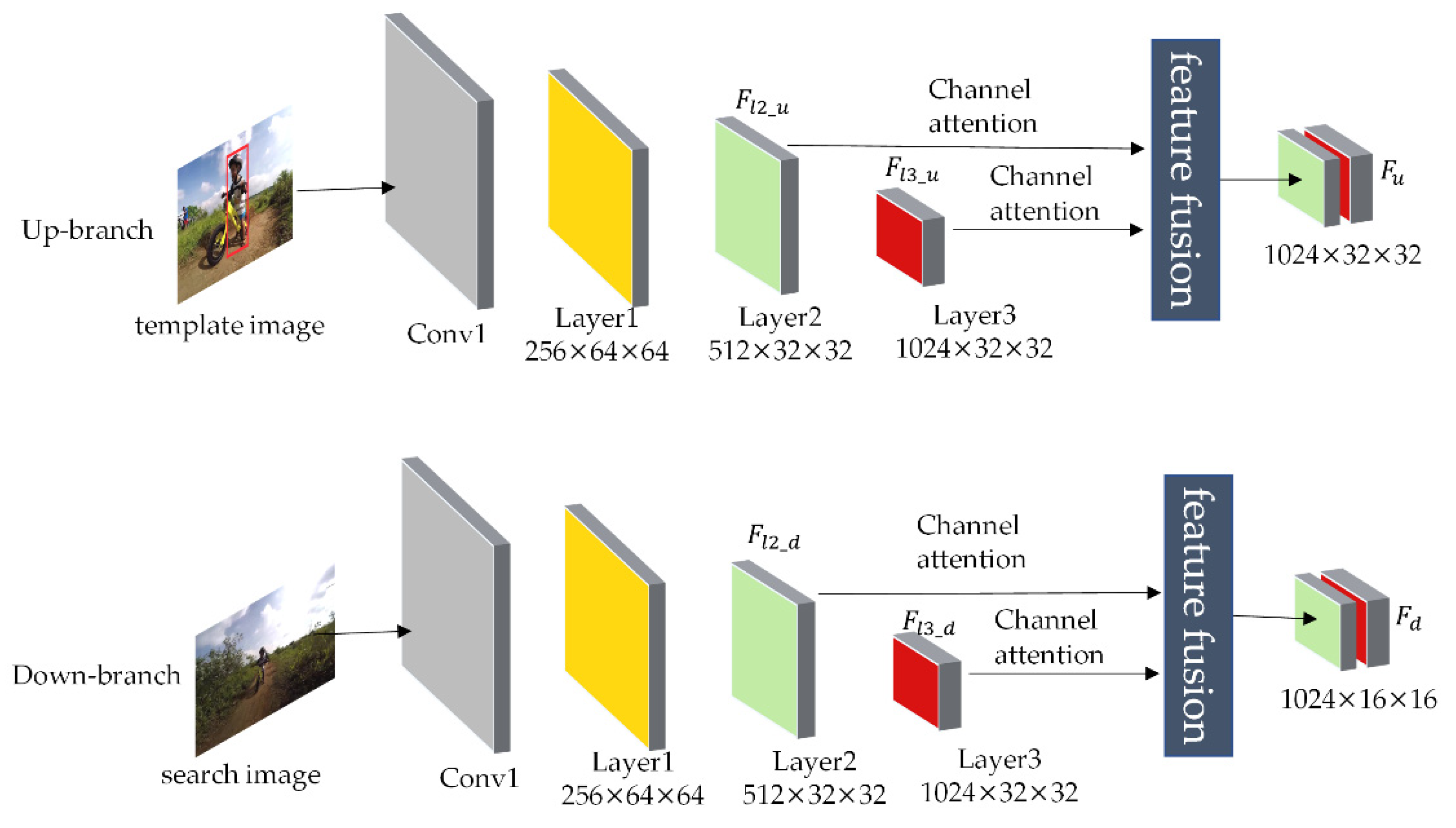
3.1. Input of The Benchmark Network
3.2. Feature Enhancement Process
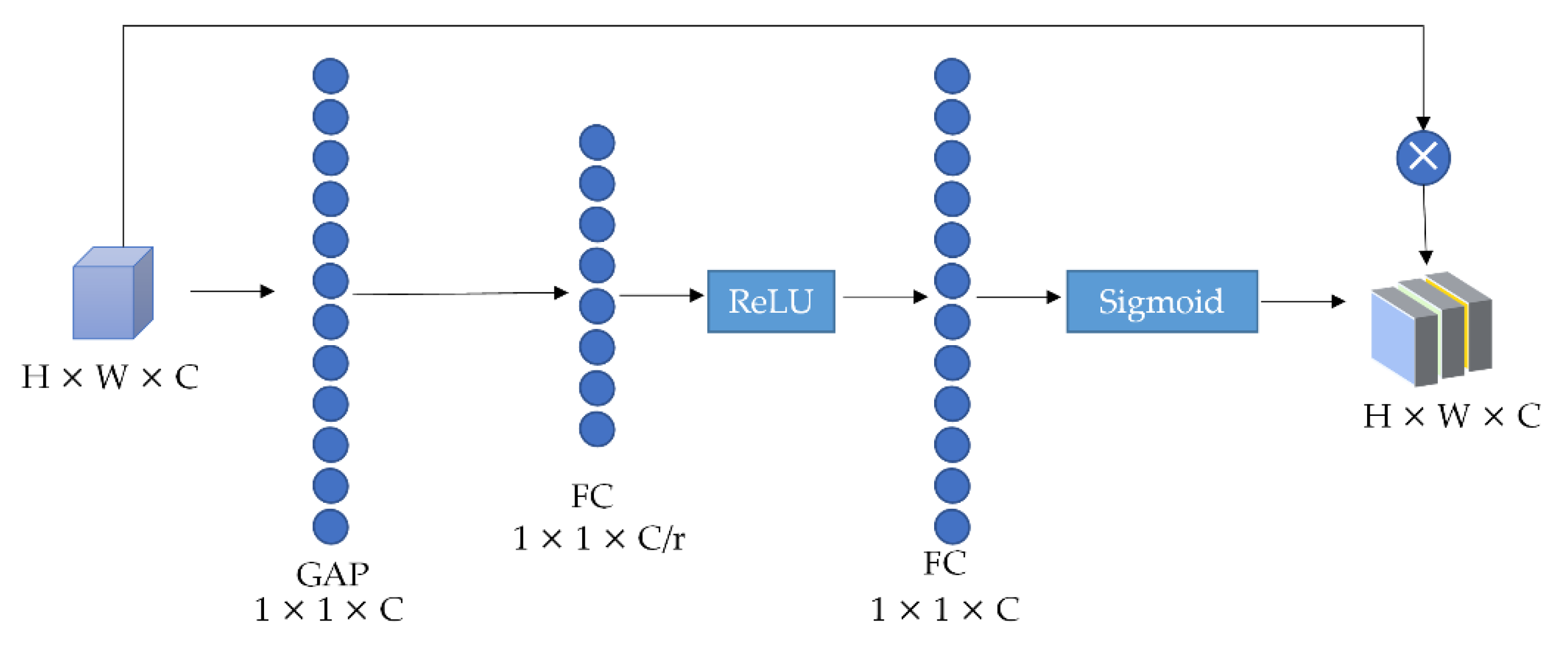
3.2.1. Feature Fusion Based on Channel Attention Mechanism
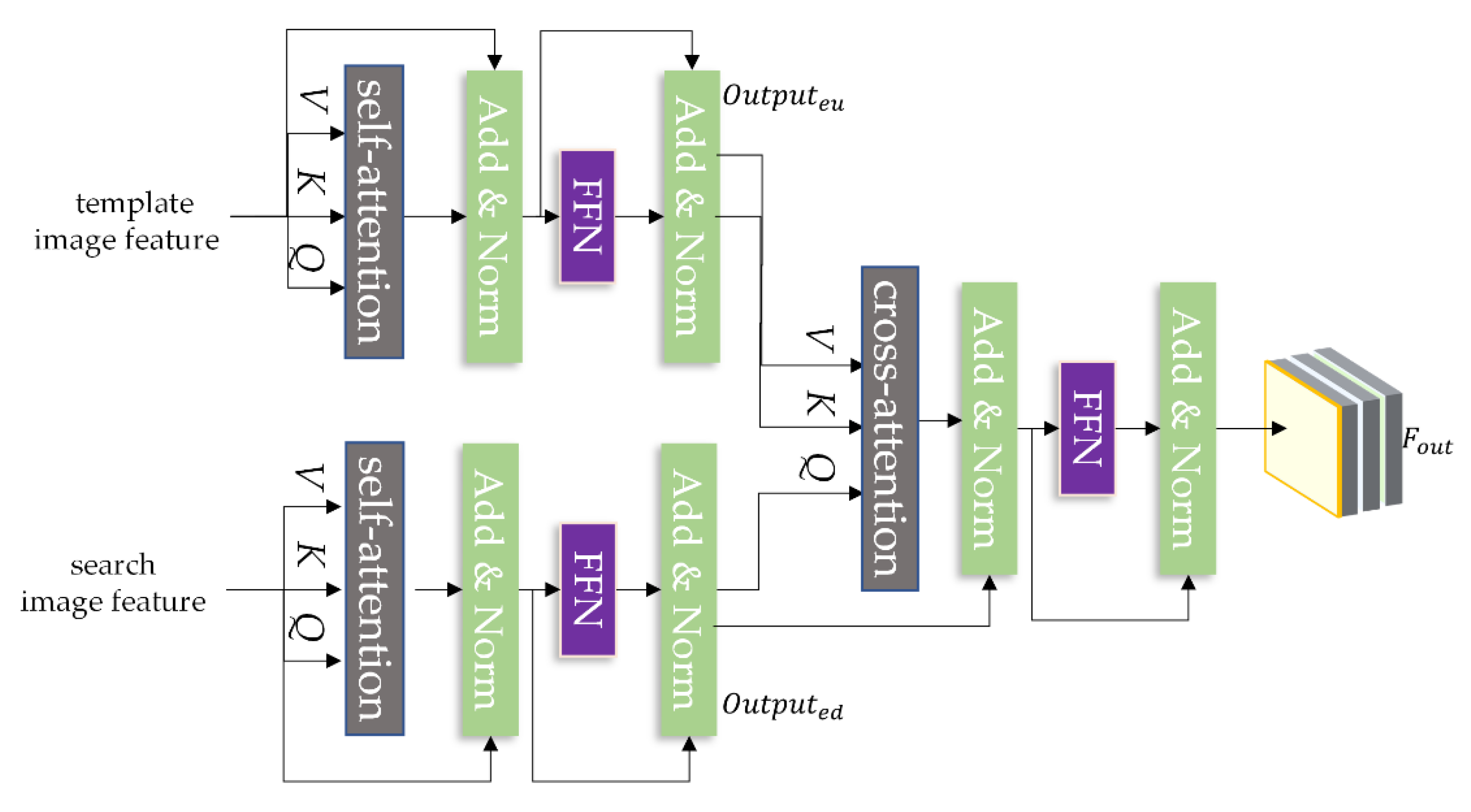
3.2.2. Transformer Long-Term Dependency Building Part
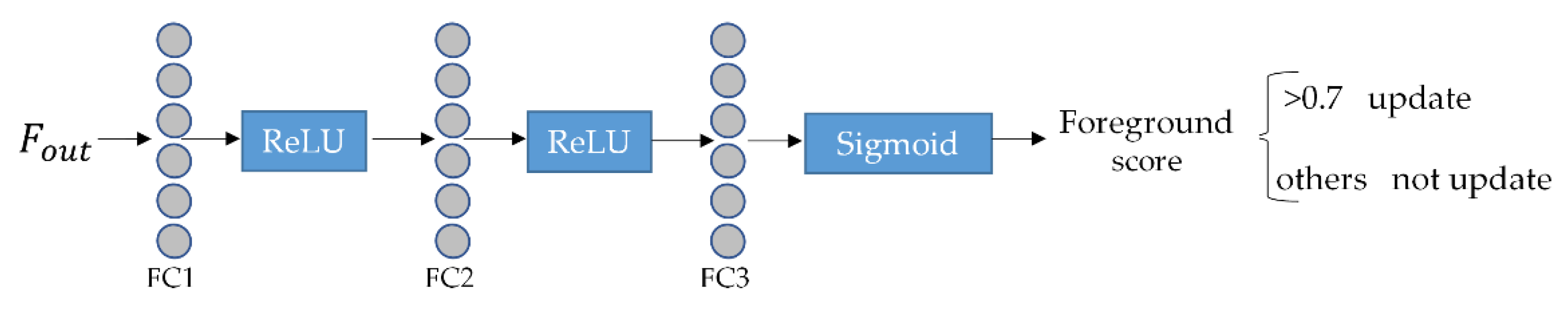
3.3. Design of Update Strategy
3.4. Algorithm Implementation
| Algorithm 1 Procedure of the proposed method |
|
4. Experimental Results and Analysis
4.1. Quantitative Analysis
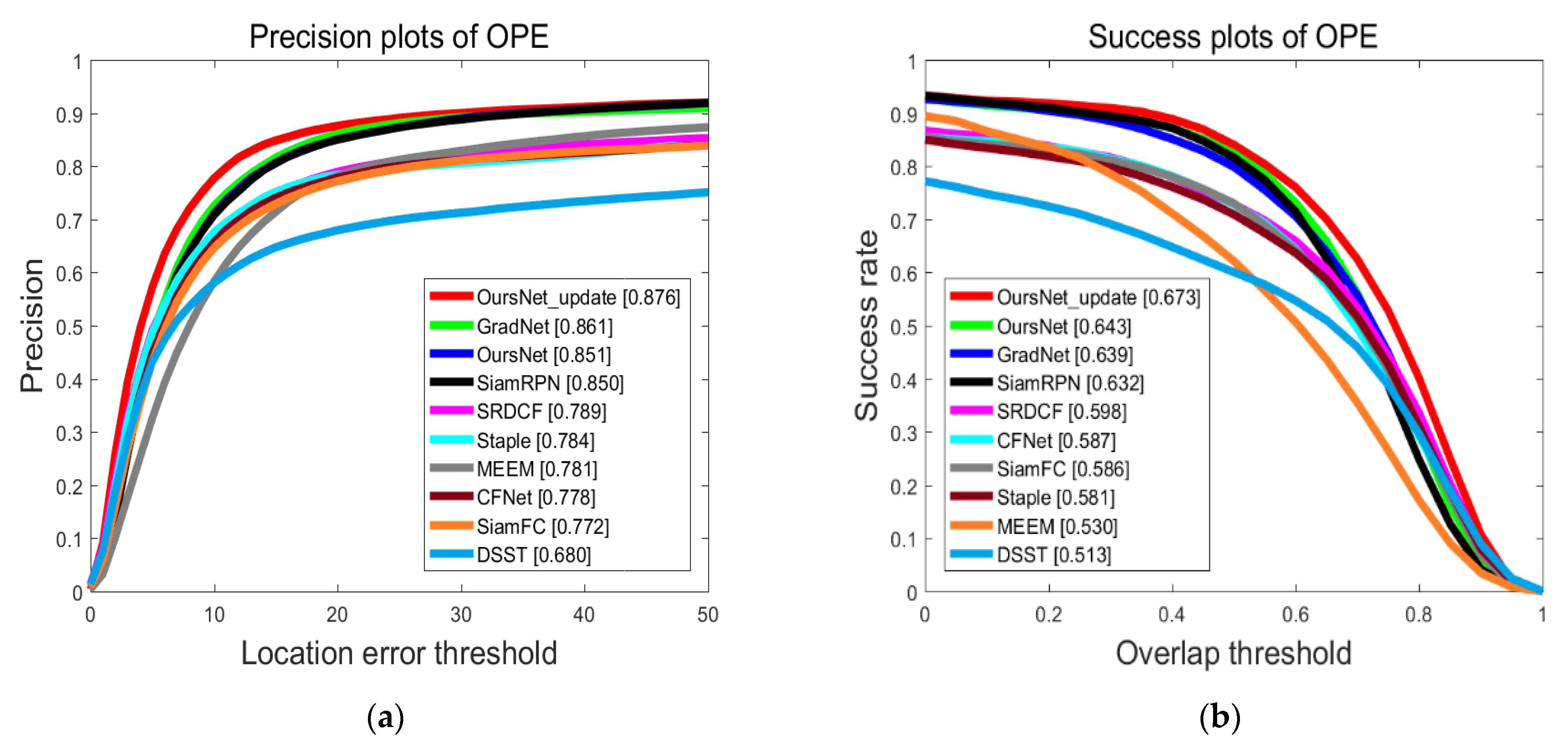
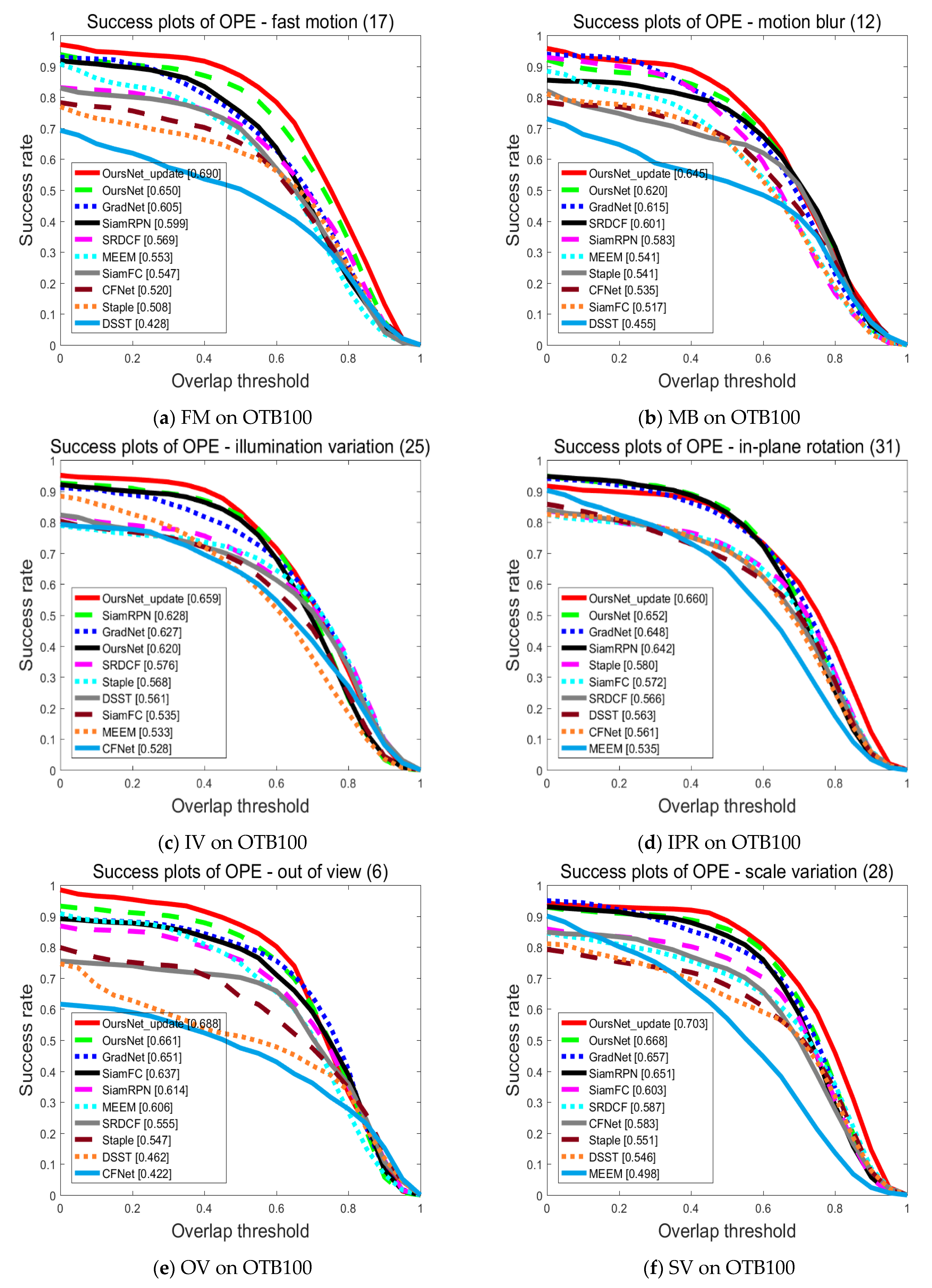
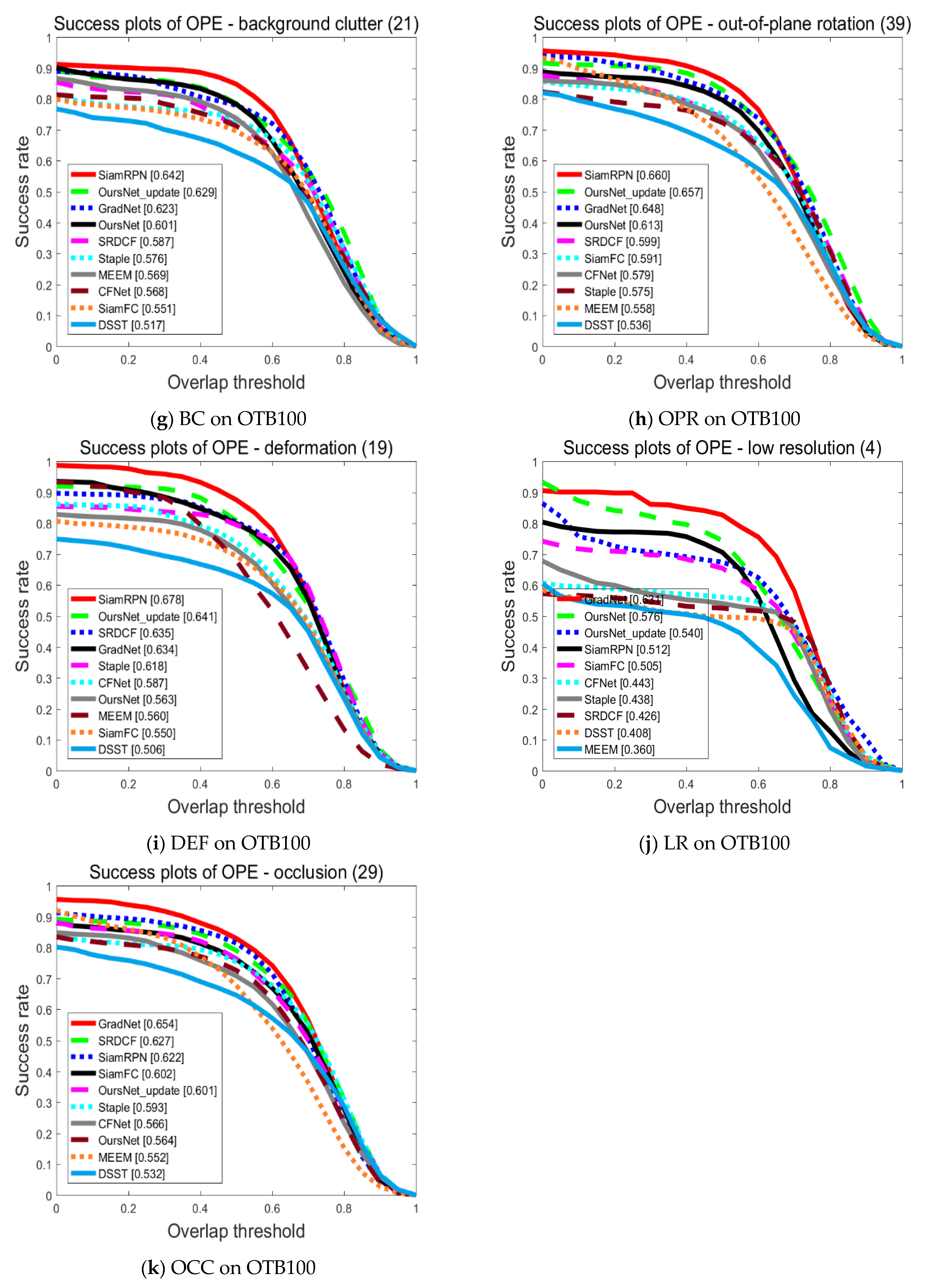
4.1.1. Comparative Analysis with Typical Tracking Algorithms on OTB100 Dataset
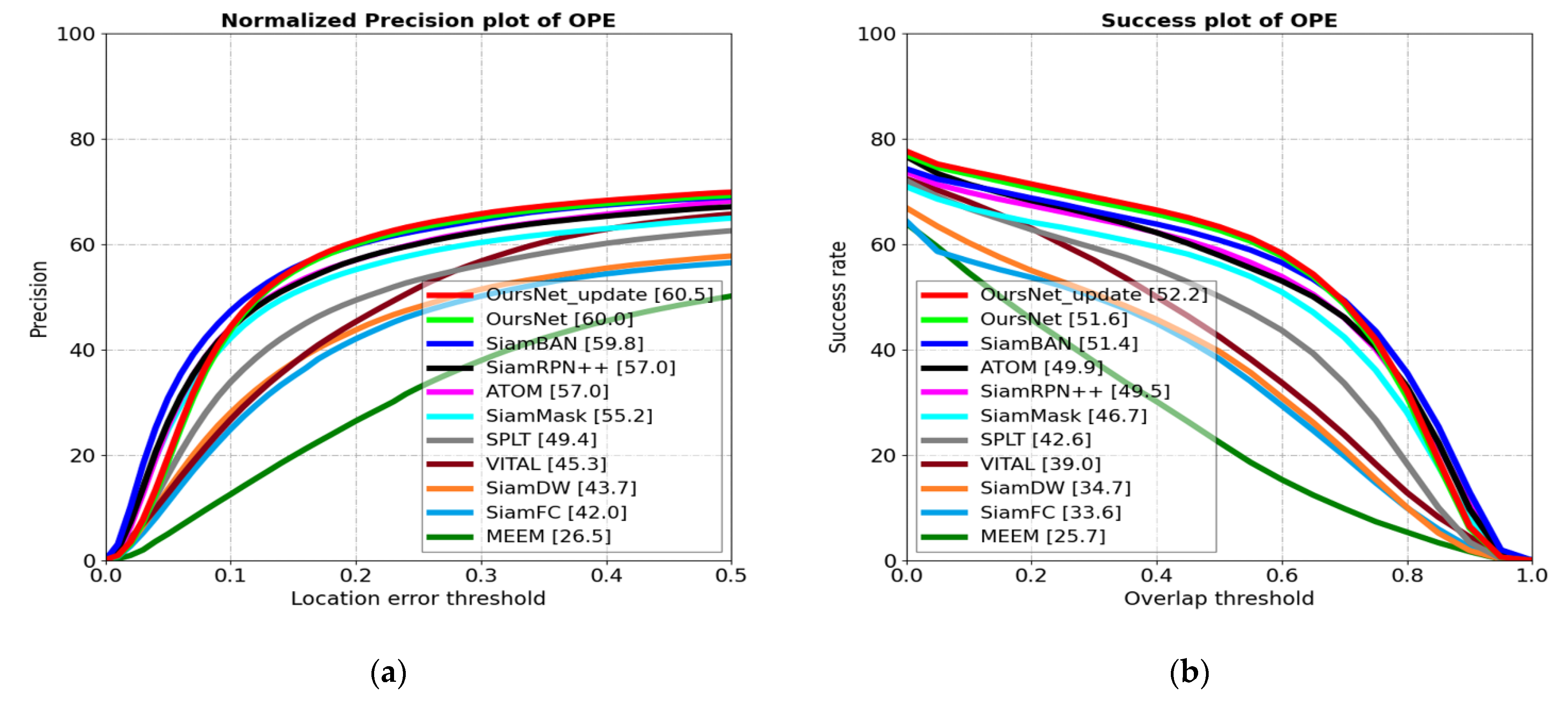
4.1.2. Comparative Analysis with Typical Tracking Algorithms on LaSOT Dataset
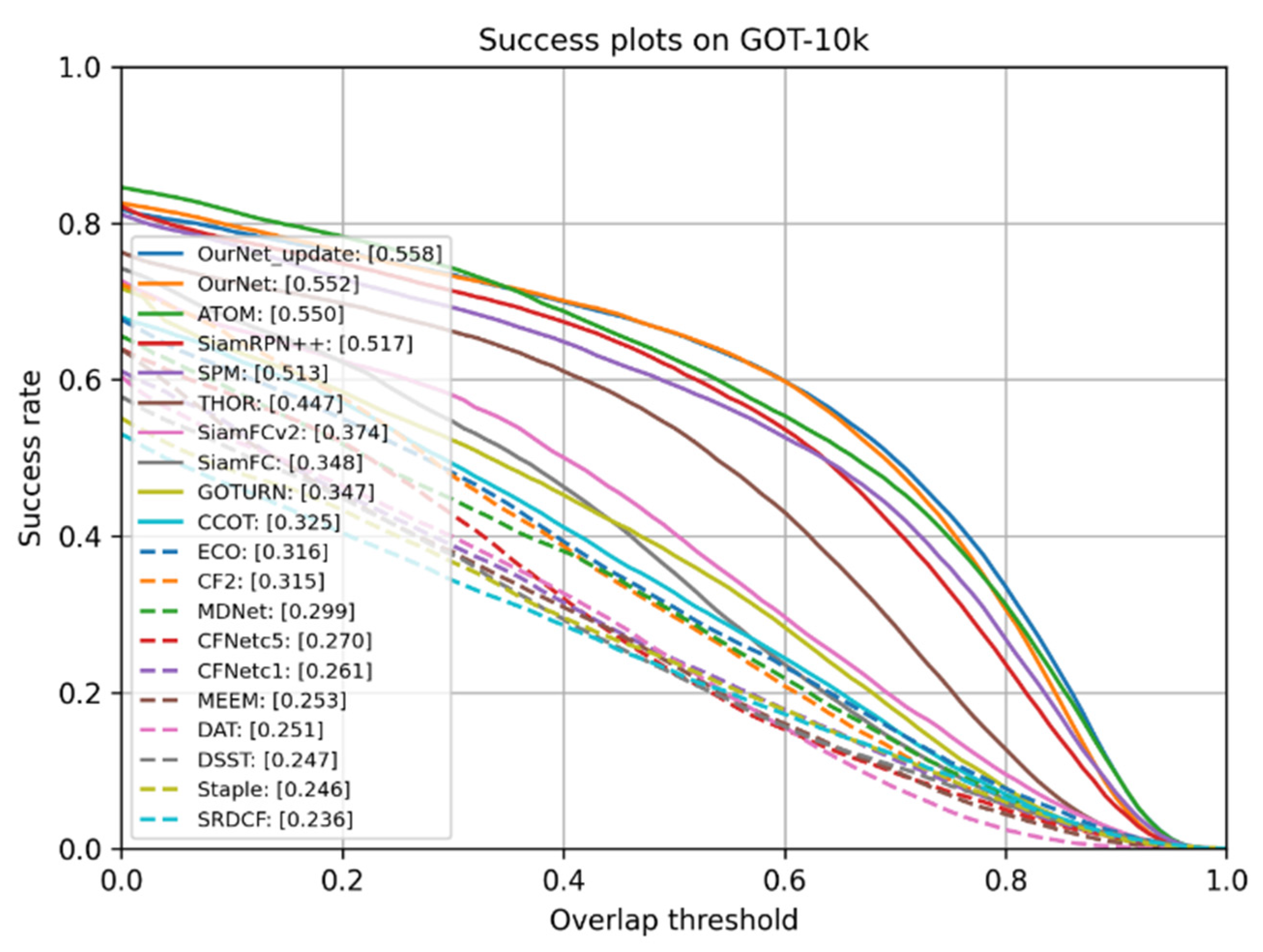
4.1.3. Comparative Analysis with Typical Tracking Algorithms on GOT-10k Dataset
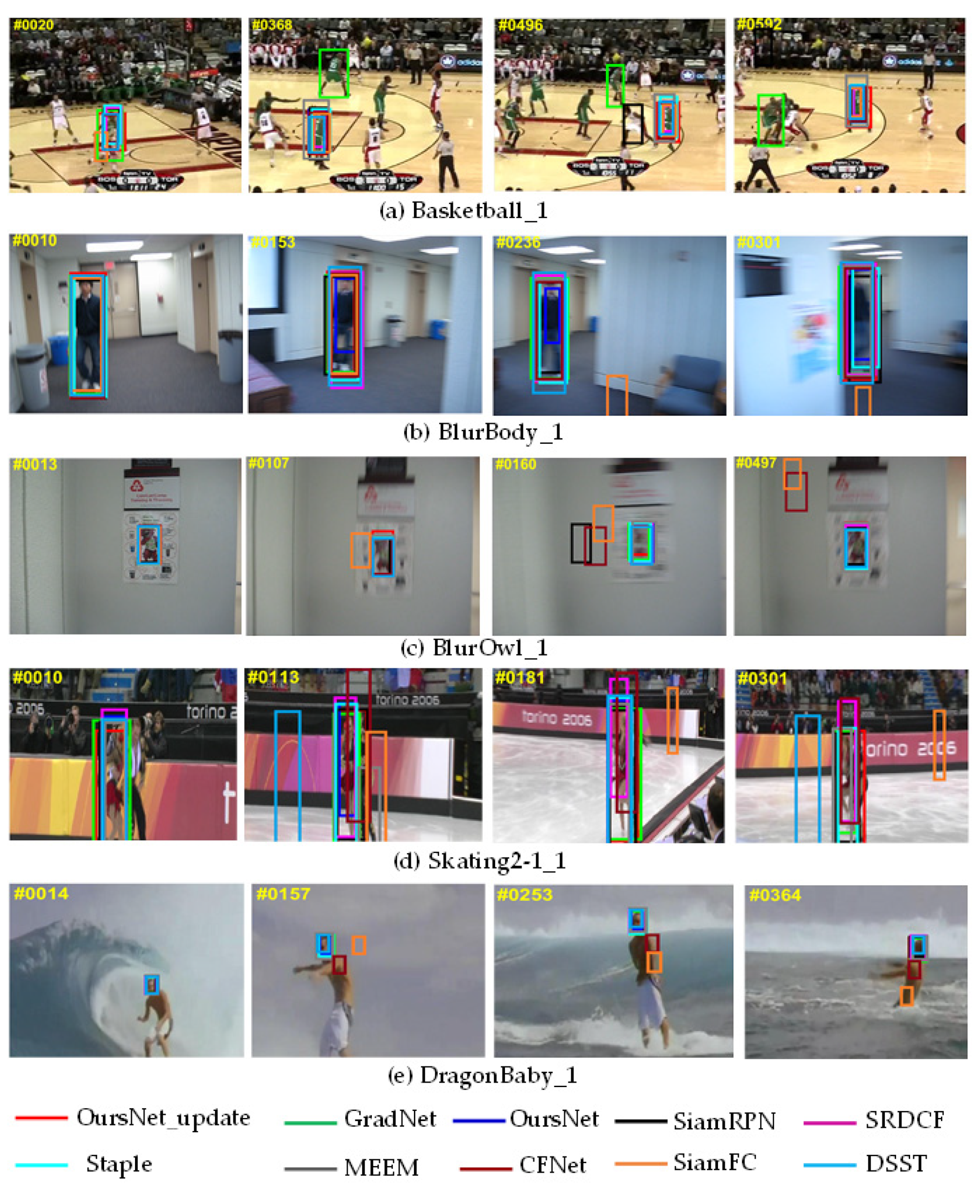
4.2. Qualitative Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Marvasti-Zadeh, S.M.; Cheng, L.; Ghanei-Yakhdan, H.; Kasaei, S. Deep learning for visual tracking: A comprehensive survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 23, 3943–3968. [Google Scholar] [CrossRef]
- Javed, S.; Danelljan, M.; Khan, F.S.; Khan, M.H.; Felsberg, M.; Matas, J. Visual Object Tracking with Discriminative Filters and Siamese Networks: A Survey and Outlook. arXiv 2021, arXiv:2112.02838. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H. Fully-convolutional siamese networks for object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 850–865. [Google Scholar]
- Chen, Z.; Zhong, B.; Li, G.; Zhang, S.; Ji, R. Siamese box adaptive network for visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 6668–6677. [Google Scholar]
- Shen, Q.; Qiao, L.; Guo, J.; Li, P.; Li, X.; Li, B.; Feng, W.; Gan, W.; Wu, W.; Ouyang, W. Unsupervised learning of accurate siamese tracking. arXiv 2022, arXiv:2204.01475. [Google Scholar]
- Li, B.; Yan, J.; Wu, W.; Zhu, Z.; Hu, X. High performance visual tracking with siamese region proposal network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8971–8980. [Google Scholar]
- Li, B.; Wu, W.; Wang, Q.; Zhang, F.; Xing, J.; Yan, J. Siamrpn++: Evolution of siamese visual tracking with very deep networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 4282–4291. [Google Scholar]
- Fan, H.; Ling, H. Siamese cascaded region proposal networks for real-time visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 7944–7953. [Google Scholar]
- Zhu, Z.; Wang, Q.; Li, B.; Wu, W.; Yan, J.; Hu, W. Distractor-aware Siamese Networks for Visual Object Tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 101–117. [Google Scholar]
- Zhang, Z.; Peng, H. Deeper and wider siamese networks for real-time visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 4591–4600. [Google Scholar]
- Wang, Q.; Zhang, L.; Bertinetto, L.; Hu, W.; Torr, P.H. Fast online object tracking and segmentation: A unifying approach. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 1328–1338. [Google Scholar]
- He, A.; Luo, C.; Tian, X.; Zeng, W. A twofold siamese network for real-time object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 4834–4843. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7132–7141. [Google Scholar]
- Wang, Q.; Teng, Z.; Xing, J.; Gao, J.; Hu, W.; Maybank, S. Learning attentions: Residual attentional siamese network for high performance online visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4854–4863. [Google Scholar]
- Yu, Y.; Xiong, Y.; Huang, W.; Scott, M.R. Deformable Siamese attention networks for visual object tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 6728–6737. [Google Scholar]
- Zhao, M.; Okada, K.; Inaba, M. TrTr: Visual tracking with transformer. arXiv 2021, arXiv:2105.03817. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 12 June 2017; pp. 5998–6008. [Google Scholar]
- Chen, X.; Yan, B.; Zhu, J.; Wang, D.; Yang, X.; Lu, H. Transformer Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Virtual, 20–25 June 2021; pp. 8122–8131. [Google Scholar]
- Ma, F.; Shou, M.Z.; Zhu, L.; Fan, H.; Xu, Y.; Yang, Y.; Yan, Z. Unified Transformer Tracker for Object Tracking. arXiv 2022, arXiv:2203.15175. [Google Scholar]
- Yan, B.; Peng, H.; Fu, J.; Wang, D.; Lu, H. Learning Spatio-Temporal Transformer for Visual Tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 10428–10437. [Google Scholar]
- Xu, Y.; Ban, Y.; Delorme, G.; Gan, C.; Rus, D.; Alameda-Pineda, X. Transcenter: Transformers with dense queries for multiple-object tracking. arXiv 2021, arXiv:2103.15145. [Google Scholar]
- Tang, C.; Qin, P.; Zhang, J. Robust template adjustment siamese network for Object Tracking. Sensors 2021, 21, 1466. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Feng, W.; Zhou, C.; Huang, R.; Wan, L.; Wang, S. Learning dynamic siamese network for visual object tracking. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1763–1771. [Google Scholar]
- Li, P.; Chen, B.; Ouyang, W.; Wang, D.; Yang, X.; Lu, H. Gradnet: Gradient-guided network for visual object tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 6162–6171. [Google Scholar]
- Yang, T.; Chan, A.B. Learning dynamic memory networks for object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 20 March 2018; pp. 152–167. [Google Scholar]
- Fan, H.; Lin, L.; Yang, F.; Chu, P.; Deng, G.; Yu, S.; Bai, H.; Xu, Y.; Liao, C.; Ling, H. LaSOT: A high-quality benchmark for large-scale single object tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Bean, CA, USA, 16–20 June 2019; pp. 5374–5383. [Google Scholar]
- Huang, L.; Zhao, X.; Huang, K. Got-10k: A large high-diversity benchmark for generic object tracking in the wild. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1562–1577. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Loshchilov, I.; Hutter, F. Decoupled weight decay regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.-H. Object tracking benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valmadre, J.; Bertinetto, L.; Henriques, J.; Vedaldi, A.; Torr, P.H. End-to-end representation learning for correlation filter based tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2805–2813. [Google Scholar]
- Danelljan, M.; Hager, G.; Shahbaz Khan, F.; Felsberg, M. Learning spatially regularized correlation filters for visual tracking. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 11–18 December 2015; pp. 4310–4318. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Golodetz, S.; Miksik, O.; Torr, P.H. Staple: Complementary learners for real-time tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1401–1409. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.; Felsberg, M. Accurate scale estimation for robust visual tracking. In Proceedings of the British Machine Vision Conference (BMVC), Nottingham, UK, 1–5 September 2014; pp. 1–11. [Google Scholar]
- Zhang, J.; Ma, S.; Sclaroff, S. MEEM: Robust tracking via multiple experts using entropy minimization. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 5–12 September 2014; pp. 188–203. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. Atom: Accurate tracking by overlap maximization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 4660–4669. [Google Scholar]
- Song, Y.; Ma, C.; Wu, X.; Gong, L.; Bao, L.; Zuo, W.; Shen, C.; Lau, R.W.; Yang, M.H. Vital: Visual tracking via adversarial learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8990–8999. [Google Scholar]
- Yan, B.; Zhao, H.; Wang, D.; Lu, H.; Yang, X. ‘Skimming-Perusal’ Tracking: A framework for real-time and robust long-term tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 2385–2393. [Google Scholar]
- Zhang, L.; Gonzalez-Garcia, A.; van de Weijer, J.; Danelljan, M.; Khan, F.S. Learning the model update for siamese trackers. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 4010–4019. [Google Scholar]
- Danelljan, M.; Bhat, G.; Shahbaz Khan, F.; Felsberg, M. Eco: Efficient convolution operators for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6638–6646. [Google Scholar]
- Nam, H.; Han, B. Learning multi-domain convolutional neural networks for visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4293–4302. [Google Scholar]
- Sauer, A.; Aljalbout, E.; Haddadin, S. Tracking Holistic Object Representations. arXiv 2019, arXiv:1907.12920. [Google Scholar]
- Wang, G.; Luo, C.; Xiong, Z.; Zeng, W. Spm-tracker: Series-parallel matching for real-time visual object tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 3643–3652. [Google Scholar]
- Held, D.; Thrun, S.; Savarese, S. Learning to track at 100 fps with deep regression networks. In Proceedings of the European Conference Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 749–765. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | AUC | |
|---|---|---|
| OurNet_update | 52.2 | 60.5 |
| OurNet | 51.6 | 60.0 |
| TrTr-online | 55.1 | - |
| TrTr-offline | 46.3 | - |
| UpdateNet-DaSiamPRN | 47.5 | 56.0 |
| UpdateNet-SiamFC | 34.9 | 43.7 |
| DSiam | 30.3 | 40.5 |
| ECO | 32.4 | 33.8 |
| Methods | AO | ||
|---|---|---|---|
| OurNet-update | 55.8 | 66 | 42.7 |
| OurNet | 55.2 | 66 | 40.8 |
| ATOM | 55.0 | 63.4 | 40.2 |
| SiamRPN++ | 51.7 | 61.6 | 32.5 |
| SPM | 51.3 | 59.3 | 35.9 |
| SiamRPN | 46.3 | 54.9 | 25.3 |
| THOR | 44.7 | 53.8 | 20.4 |
| SiamFCv2 | 37.4 | 40.4 | 14.4 |
| SiamFC | 34.8 | 35.3 | 9.8 |
| GOTURN | 34.7 | 37.5 | 12.4 |
| ECO | 31.6 | 30.9 | 11.1 |
| MDNet | 29.9 | 30.3 | 9.9 |
| Staple | 24.6 | 23.9 | 8.9 |
| SRDCF | 23.6 | 22.7 | 9.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Liu, H.; Hui, Y.; Wu, X.; Zhao, J. Transformer Feature Enhancement Network with Template Update for Object Tracking. Sensors 2022, 22, 5219. https://doi.org/10.3390/s22145219
Hu X, Liu H, Hui Y, Wu X, Zhao J. Transformer Feature Enhancement Network with Template Update for Object Tracking. Sensors. 2022; 22(14):5219. https://doi.org/10.3390/s22145219
Chicago/Turabian StyleHu, Xiuhua, Huan Liu, Yan Hui, Xi Wu, and Jing Zhao. 2022. "Transformer Feature Enhancement Network with Template Update for Object Tracking" Sensors 22, no. 14: 5219. https://doi.org/10.3390/s22145219