
Study of Texture Indicators Applied to Pavement Wear Analysis Based on 3D Image Technology


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Data Acquisition
2.1. Data Standardisation (DS)
2.2. Slope Correction (SC)
2.3. Missing Value Processing (MP)
2.4. Outlier Processing (OP)
2.5. Envelope Processing (EP)
3. Methodology
3.1. Texture Indicators Calculation Methods
3.1.1. Texture Separation
3.1.2. Texture Power Spectrum Density
3.1.3. Grey Level Co-Occurrence Matrix
3.1.4. Fractal Theory
3.2. Indicators Evaluation Method
4. Results and Discussion
4.1. Texture Indicators Calculation Results
4.1.1. Texture Separation
4.1.2. Texture Power Spectrum Density
4.1.3. Grey Level Co-Occurrence Matrix (GLCM)
4.1.4. Fractal Theory
4.2. Comparative Analysis and Evaluation of Texture Indicators
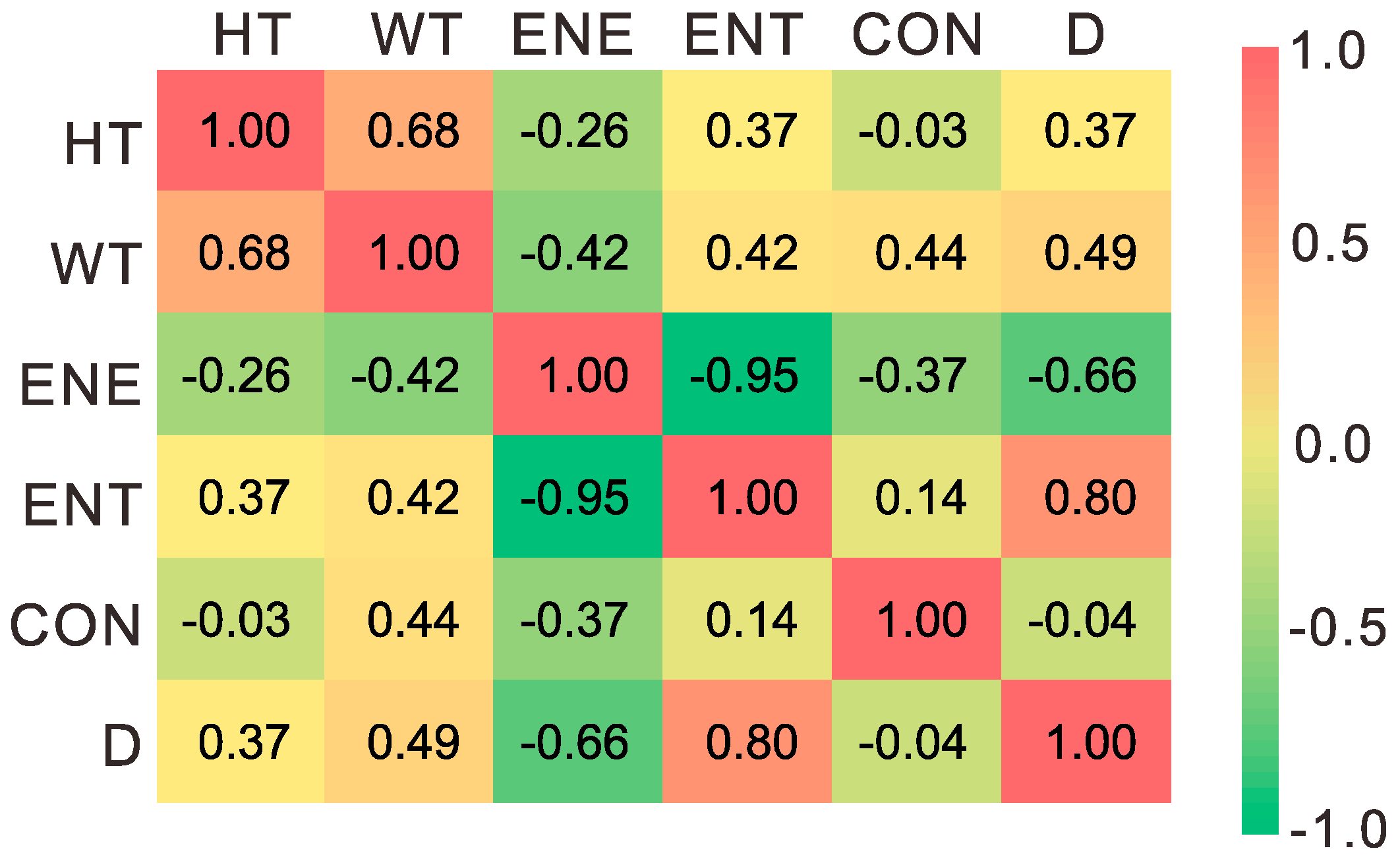
4.2.1. Pearson Correlation Coefficients Matrix
4.2.2. Distinction Vector
4.2.3. The Effect of the Texture Separation on These Indicators
5. Conclusions
- D, WT and ENT exhibit high degrees of numerical concentration for the same road sections. The three indicators may be more statistically helpful in distinguishing the characteristics of pavement performance decay. D reflects different information from all the other statistical variables. The specimens do not possess all the actual pavements’ statistical characteristics.
- ENE, ENT and D have a certain consistency, which means that these indicators have certain substitutability for each other. CON represents some unique texture statistical information.
- ENT and D have greater differentiation than other indicators on the micro-scale, and its macro-texture has a higher differentiation than the overall one. Their performance in wear characteristics seems to be more prominent.
- With high degrees of numerical concentration for the same road sections and differentiation degrees, D, PSD indicators, and ENT should be further studied based on more road sections or abraded specimens.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kokkalis, A.G.; Tsohos, G.H.; Panagouli, O.K. Consideration of fractals potential in pavement skid resistance evaluation. J. Transp. Eng. 2002, 128, 591–595. [Google Scholar] [CrossRef]
- Flintsch, G.W.; McGhee, K.K.; Izeppi, E.D.L.; Najafi, S. The Little Book of Tire Pavement Friction. Pavement Surf. Prop. Consort. 2012, 1, 1–22. [Google Scholar]
- Ueckermann, A.; Wang, D.; Oeser, M.; Steinauer, B. Calculation of skid resistance from texture measurements. J. Traffic Transp. Eng. Engl. Ed. 2015, 2, 3–16. [Google Scholar] [CrossRef] [Green Version]
- Chu, L.; Fwa, T.F. Incorporating Pavement Skid Resistance and Hydroplaning Risk Considerations in Asphalt Mix Design. J. Transp. Eng. 2016, 142, 04016039. [Google Scholar] [CrossRef]
- Anfosso-Lédée, F.; Do, M.-T. Geometric Descriptors of Road Surface Texture in Relation to Tire-Road Noise. Transp. Res. Rec. J. Transp. Res. Board 2002, 1806, 160–167. [Google Scholar] [CrossRef] [Green Version]
- Smit, A.; Trevino, M.; Garcia, N.Z.; Buddhavarapu, P.; Prozzi, J. Selection and Design of Quiet Pavement Surfaces (No. FHWA/TX-16/0-6819-1). 2016. Available online: https://library.ctr.utexas.edu/ctr-publications/0-6819-1.pdf (accessed on 5 May 2020).
- Ktari, R.; Fouchal, F.; Millien, A.; Petit, C. Surface roughness: A key parameter in pavement interface design. Eur. J. Environ. Civ. Eng. 2017, 21, 27–42. [Google Scholar] [CrossRef]
- Pratico, F.G.; Astolfi, A. A new and simplified approach to assess the pavement surface micro-and macrotexture. Constr. Build. Mater. 2017, 148, 476–483. [Google Scholar] [CrossRef]
- Zou, Y.; Yang, G.; Cao, M. Neural network-based prediction of sideway force coefficient for asphalt pavement using high-resolution 3D texture data. Int. J. Pavement Eng. 2021, 2021, 1884862. [Google Scholar] [CrossRef]
- Fwa, T.F. Skid resistance determination for pavement management and wet-weather road safety. Int. J. Transp. Sci. Technol. 2017, 6, 217–227. [Google Scholar] [CrossRef]
- Xiao, S.; Tan, T.; Xing, C.; Tan, Y. A contribution to texture analysis of pavements under simulated polishing: Some new findings. Int. J. Pavement Eng. 2020, 2021, 1855351. [Google Scholar] [CrossRef]
- Matlack, G.R.; Horn, A.; Aldo, A.; Walubita, L.F.; Naik, B.; Khoury, I. Measuring surface texture of in-service asphalt pavement: Evaluation of two proposed hand-portable methods. Road Mater. Pavement Des. 2021, 2021, 2009902. [Google Scholar] [CrossRef]
- Chen, D.; Sefidmazgi, N.R.; Bahia, H. Exploring the feasibility of evaluating asphalt pavement surface macro-texture using image-based texture analysis method. Road Mater. Pavement Des. 2015, 16, 405–420. [Google Scholar] [CrossRef]
- Puzzo, L.; Loprencipe, G.; Tozzo, C.; D’Andrea, A. Three-dimensional survey method of pavement texture using photographic equipment. Measurement 2017, 111, 146–157. [Google Scholar] [CrossRef]
- Xin, Q.; Qian, Z.; Miao, Y.; Meng, L.; Wang, L. Three-dimensional characterisation of asphalt pavement macrotexture using laser scanner and micro element. Road Mater. Pavement Des. 2017, 18, 190–199. [Google Scholar] [CrossRef]
- Chen, D. Evaluating asphalt pavement surface texture using 3D digital imaging. Int. J. Pavement Eng. 2020, 21, 416–427. [Google Scholar] [CrossRef]
- Medeiros, M., Jr.; Babadopulos, L.; Maia, R.; Castelo Branco, V. 3D pavement macrotexture parameters from close range photogrammetry. Int. J. Pavement Eng. 2021, 2021, 2020784. [Google Scholar] [CrossRef]
- Wei, D.; Li, B.; Zhang, Z.; Han, F.; Zhang, X.; Zhang, M.; Li, L.; Wang, Q. Influence of Surface Texture Characteristics on the Noise in Grooving Concrete Pavement. Appl. Sci. 2018, 8, 2141. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.J.; Zhan, Y.; Yang, G.; Wang, K.C.P. Pavement skid resistance as a function of pavement surface and aggregate texture properties. Int. J. Pavement Eng. 2020, 21, 1159–1169. [Google Scholar] [CrossRef]
- Nurunnabi, A.; Belton, D.; West, G. Robust statistical approaches for local planar surface fitting in 3D laser scanning data. Isprs J. Photogramm. Remote Sens. 2014, 96, 106–122. [Google Scholar] [CrossRef] [Green Version]
- Leys, C.; Ley, C.; Klein, O.; Bernard, P.; Licata, L. Detecting outliers: Do not use standard deviation around the mean, use absolute deviation around the median. J. Exp. Soc. Psychol. 2013, 49, 764–766. [Google Scholar] [CrossRef] [Green Version]
- Mathworks Inc. Signal Processing Toolbox User’s Guide; Mathworks Inc.: Natick, MA, USA, 2022. [Google Scholar]
- Unser, M. Sum and Difference Histograms for Texture Classification. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 118–125. [Google Scholar] [CrossRef] [PubMed]
- Marceau, D.J.; Howarth, P.J.; Dubois, J.M.; Gratton, D.J. Evaluation Of The Grey-level Co-occurrence Matrix Method For Land-cover Classification Using Spot Imagery. IEEE Trans. Geosci. Remote Sens. 1990, 28, 513–519. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Mandelbrot, B.B. The Fractal Geometry of Nature; W. H. Freeman and Company: New York, NY, USA, 1982; ISBN 978-0-7167-1186-5. [Google Scholar]
- Feder, J. Fractals; Springer: New York, NY, USA; London, UK, 1988; ISBN 978-1-4899-2126-0. [Google Scholar]
- Lam, A.D.K.T.; Li, Q. Fractal analysis and multifractal spectra for the images. In Proceedings of the 2010 International Symposium on Computer, Communication, Control and Automation (3CA), Tainan, Taiwan, 5–7 May 2010; Volume 2, pp. 530–533. [Google Scholar] [CrossRef]
- Cai, J.; Zhou, G. Study on Fractal Theory in Identifing Soil Fabric in Civil Engineering. In Proceedings of the 2011 Fourth International Workshop on Chaos-Fractals Theories and Applications (IWCFTA), Hangzhou, China, 19–22 October 2011; pp. 407–411. [Google Scholar] [CrossRef]
- Li, W.; Zhao, H.; Guo, J.; Wang, L.; Yu, J. A multi-scale fractal dimension based onboard ship saliency detection algorithm. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 628–633. [Google Scholar] [CrossRef]
- Sarkar, N.; Chaudhuri, B.B. An efficient differential box-counting approach to compute fractal dimension of image. IEEE Trans. Syst. Man Cybern. 1994, 24, 115–120. [Google Scholar] [CrossRef] [Green Version]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Qin, Y.; Wang, H.; Xu, S.; Li, S. Study of Texture Indicators Applied to Pavement Wear Analysis Based on 3D Image Technology. Sensors 2022, 22, 4955. https://doi.org/10.3390/s22134955
Li Y, Qin Y, Wang H, Xu S, Li S. Study of Texture Indicators Applied to Pavement Wear Analysis Based on 3D Image Technology. Sensors. 2022; 22(13):4955. https://doi.org/10.3390/s22134955
Chicago/Turabian StyleLi, Yutao, Yuanhan Qin, Hui Wang, Shaodong Xu, and Shenglin Li. 2022. "Study of Texture Indicators Applied to Pavement Wear Analysis Based on 3D Image Technology" Sensors 22, no. 13: 4955. https://doi.org/10.3390/s22134955