1. Introduction
In recent years, piezoresistive pressure sensors based on microelectromechanical system (MEMS) have been employed in many industrial and commercial applications. Piezoresistive pressure sensors, manufactured utilizing the piezoresistive effect of semiconductor materials, have the benefits of excellent performance, a low price, small scale, and ease of preparation [
1,
2]. The diaphragm and piezoresistive elements are the essential parts of a piezoresistive pressure sensor, in which four piezoresistors are positioned in the high strain area of the diaphragm to form a full Wheatstone bridge. The diaphragm deforms to produce stress when external pressure is exerted, and the resulting change in the resistance of piezoresistors is transformed into an output voltage. Piezoresistive pressure sensors are now widely employed in aerospace [
3], automotive [
4], and biomedical [
5] applications because of their numerous advantages.
However, the performance of MEMS piezoresistive pressure sensors can degrade due to the trade-off between sensitivity and nonlinearity. Two key factors, the geometric design of the sensor and the selection of piezoresistive material, are focused on alleviating the conflict between sensitivity and nonlinearity. Therefore, many structures have been suggested, debated, and extensively researched during the last few decades. For instance, Nambisan et al. compared the sensitivity and nonlinearity of a piezoresistive pressure sensor with a typical diaphragm to a piezoresistive pressure sensor with a bossed design to enhance the device’s performance. The study also discovered a linear trend in sensitivity and nonlinearity as the size of the introduced boss increased [
6]. Tian et al. created a cross-beam-membrane (CBM) structure, with experimental findings indicating a sensitivity of 7.081 mV/kPa and a pretty low nonlinearity of 0.09% FSS, but the device was bulky [
7,
8]. Yu et al. presented a beam-membrane-quad-island (BMQI) structure with a comparatively high sensitivity of 17.795 μV/V/Pa but poor linearity and a reasonably massive device size [
9,
10]. Another pressure sensor with a peninsula structure situated on a diaphragm was proposed by Huang et al.; the sensitivity of this sensor was measured to be 18.4 mV/kPa, while the nonlinearity was 0.36% FSS and the device size was 3600 × 3600 μm
2 [
11]. Xu et al. suggested a novel diaphragm that combines a bossed design with a peninsula–island structure to decrease strain energy dissipation in locations other than the stress concentration. The sensitivity of this sensor was determined to be 0.066 mV/V/Pa, but its nonlinearity was 0.33% FSS, and its diaphragm size was 3500 × 3500 μm
2 [
12]. Meng et al. devised a piezoresistive pressure sensor with a beam-membrane-dual-island structure, with a sensitivity of 17.339 μV/V/Pa; however, the nonlinearity was relatively large, reaching 2.556% FSS, and the chip size was also huge at 7000 × 7000 μm
2 [
13]. A pressure sensor combining a four-grooved membrane with a rod beam was developed by Li et al., which has a sensitivity of up to 30.9 mV/V/psi and nonlinearity of 0.21% FSS [
14]. Tran et al. designed a piezoresistive pressure sensor with a great sensitivity of 34.67 mV/kPa and nonlinearity of 0.23% FSS by integrating a four-petal membrane, four narrow beams, and a central boss (PMNBCB) [
15]. Gao et al. suggested the development of a novel peninsula-shaped diaphragm piezoresistive differential pressure sensor. The sensitivity of this sensor was calculated to be 22.7 mV/kPa with a nonlinearity of 0.11% FSS [
16]. However, these sensors that mix beams and islands all have poor linearity, limiting the application of pressure sensors in various fields.
For many years, monocrystalline silicon materials have been commonly used as piezoresistive components in pressure sensors. However, to further develop piezoresistive sensors with increased sensitivity, a broad detection range, and intense pressure resistance, several researchers have begun to focus on the novel two-dimensional (2D) material graphene [
17]. Graphene has a Young’s modulus of up to 1 Tpa [
18], exceptionally high stiffness, outstanding electrical conductivity [
19], remarkable flexibility, and tensile strain of up to 18.7% [
20,
21]. Moreover, the resistivity of graphene changes linearly with strain [
20,
22]. As a result, graphene has become one of the most promising alternatives for piezoresistive materials. Using the contents of Singh et al.’s research on the size of piezoresistive pressure sensors [
23], Nag et al. compared the sensing performance of graphene and polysilicon when they were employed as piezoresistive materials. The simulation results indicated that the sensitivity of the graphene pressure sensor, albeit 0.17 mV/psi higher than the polysilicon pressure sensor, was relatively low at 3.98 mV/psi [
24]. Soon after, Nag et al. introduced rod beams placed beneath the film based on their previous study, which increased the sensitivity by 58%, but it was still low at 6.28 mV/psi [
25]. Chun et al. suggested employing two separated single-layer graphenes on a flexible substrate to create a graphene pressure sensor for tactile sensing. For low-pressure measurements, the sensitivity was −0.24 kPa
−1, and for high-pressure measurements, it was 0.039 kPa
−1 [
26]. Rinaldi et al. reported a multilayer graphene piezoresistive pressure sensor with a calculated sensitivity of 0.23 kPa
−1 and the ability to detect compressive stresses as low as 10 kPa at an applied pressure of 70 kPa [
27]. As observed, graphene is an excellent piezoresistive material for improving device performance.
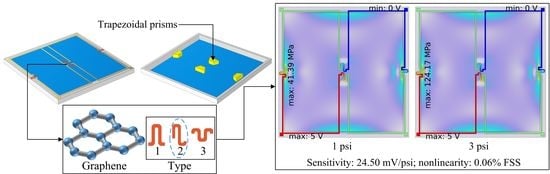
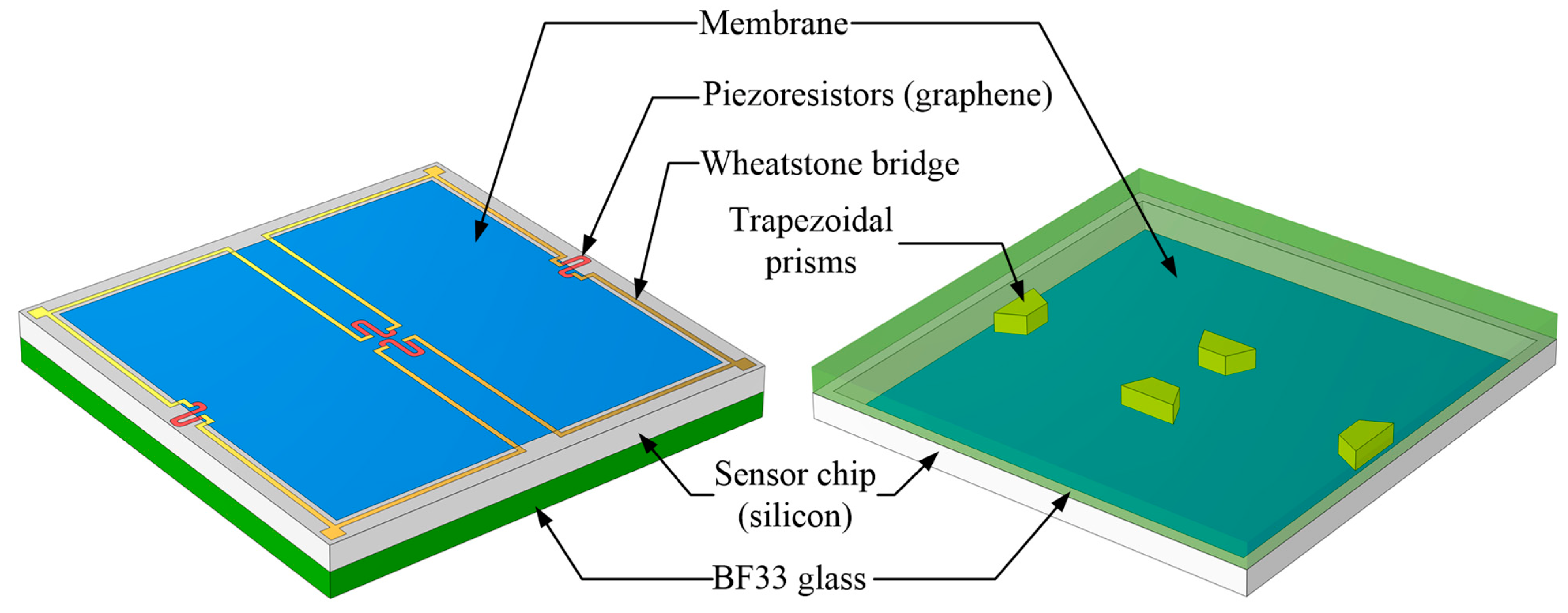
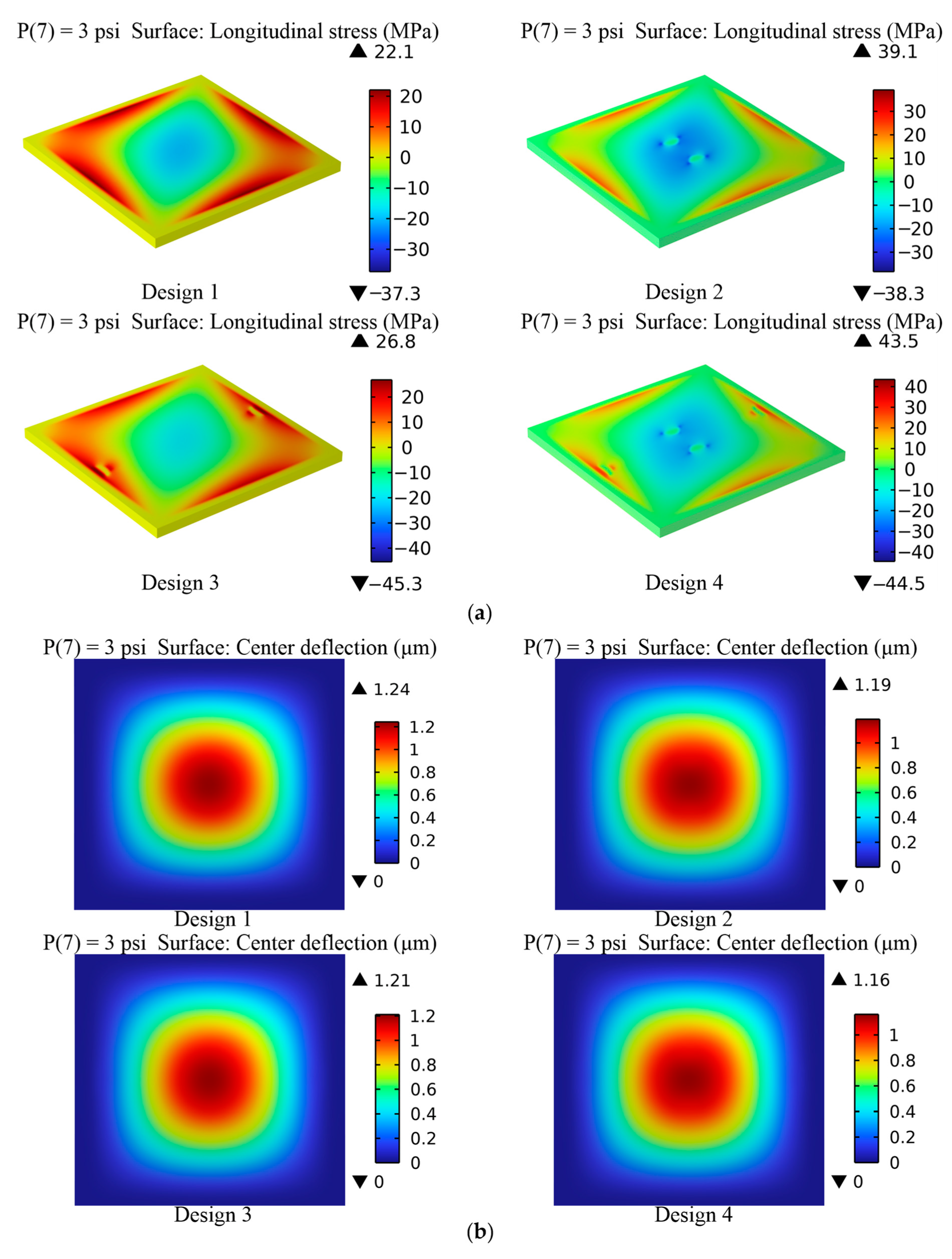
This paper presents a unique structure of a graphene piezoresistive pressure sensor combining a flat diaphragm with trapezoidal prisms for detecting low pressure (see
Figure 1). COMSOL Multiphysics software is used to conduct a finite element analysis (FEA) of the stress distribution and deflection for pressure sensors. The initial formulation and further optimization of the structural dimensions are then made using the curve fitting approach and Taguchi method. Moreover, the proposed structure is also compared to three other designs to demonstrate its superiority. Finally, three different serpentine-shaped graphene piezoresistors are explored to maximize sensor performance.
2. Fundamentals and Methodology
A piezoresistive pressure sensor comprises a thin plate and a complete Wheatstone bridge structure of four piezoresistors.
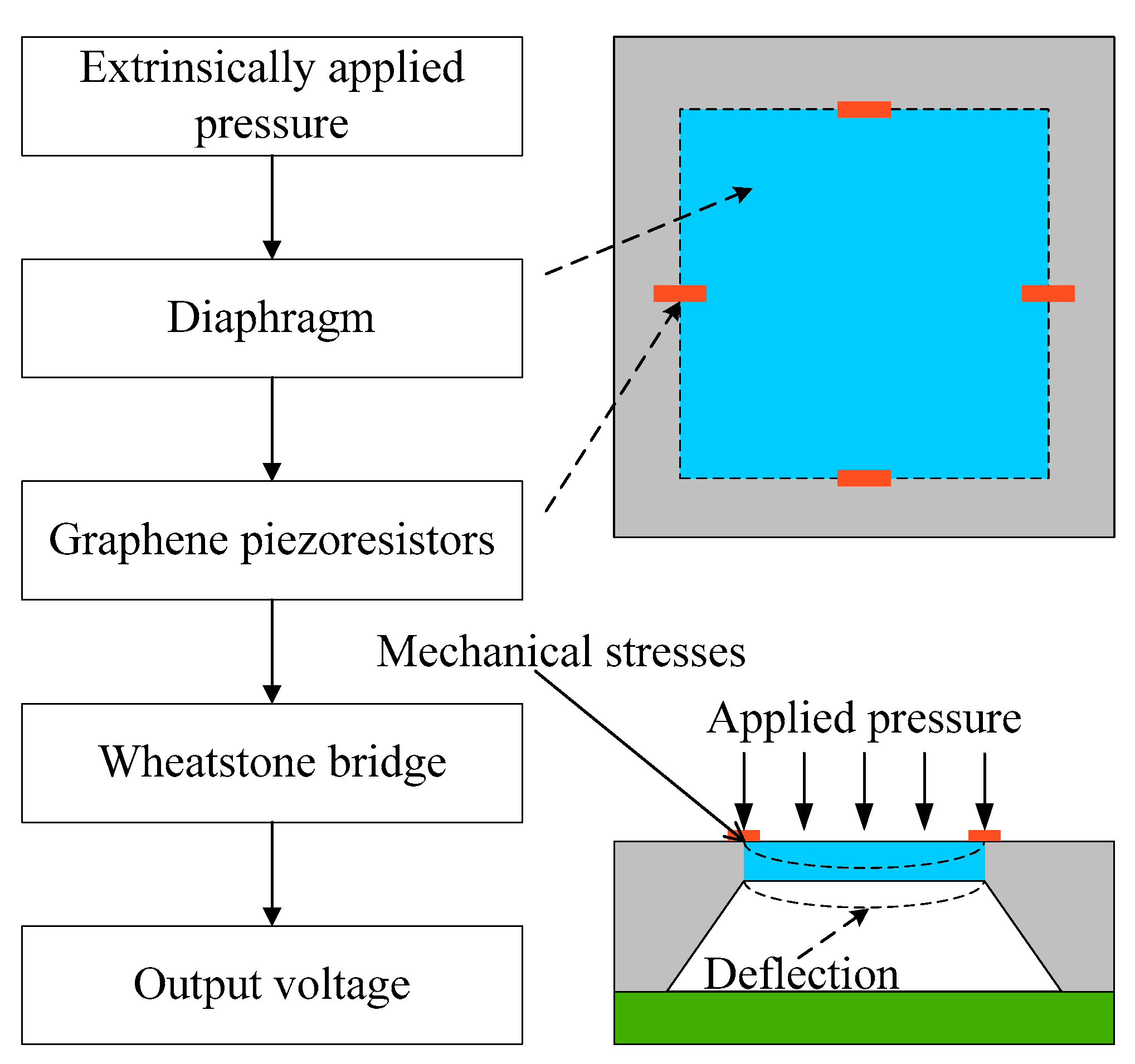
Figure 2 describes the primary working principle of a piezoresistive pressure sensor, which is based on generated stress and deflection under extrinsically applied pressure. Once force is exerted on the top of the diaphragm, the piezoresistors are subjected to induced stress, and their resistance values fluctuate due to the piezoresistive effect, resulting in a change in the output voltage of the Wheatstone bridge structure. It is worth noting that the sensing element of a piezoresistive pressure sensor is critical in translating applied pressure into resistance and output voltage fluctuation.
Since each piezoresistor is placed to cover the region of tensile or compressive stress, thus, two piezoresistors are put towards the central zone of the membrane, while the other two are positioned at the borders of the fixed diaphragm [
23].
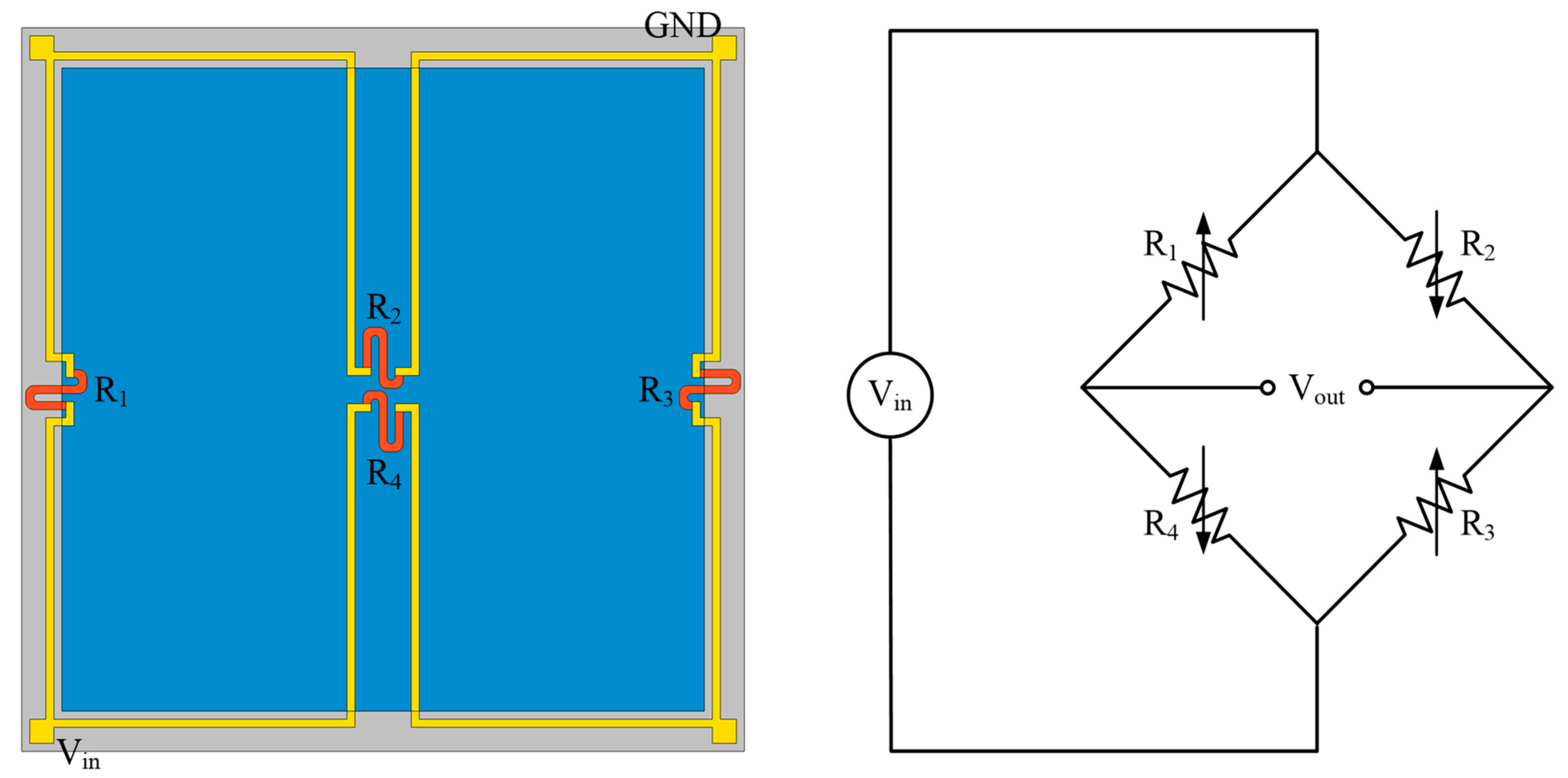
Figure 3 depicts the positioning of four piezoresistors coupled in a Wheatstone bridge construction, with
R1 and
R3 representing longitudinal piezoresistors and
R2 and
R4 representing transverse piezoresistors. In this work, the piezoresistors are manufactured by graphene and aligned along the (110)-direction on (100) n-type silicon to enhance the piezoresistive effect [
28]. The deformation of the sensing element changes the potential distribution, which influences carrier mobility and, ultimately, the element resistance. The resistivity is determined by the sensor tensor and the 6 × 6 piezoresistive coefficient matrix. Due to the crystalline form of graphene, the piezoresistive coefficient matrix only has three non-zero independent components (
π11,
π12, and
π44), as illustrated below
The piezoresistive coefficients of the graphene material utilized in this work are referenced from a similar investigation by Nag et al. [
24]. For resistance fluctuations in a piezoresistor, the simplified formula can be represented by
where ∆
R represents the change in resistance after applying pressure, and
R indicates the resistance value when no force is applied [
29].
πl and
πt denote the longitudinal and transverse piezoresistive coefficients, respectively.
σl and
σt are the longitudinal and transverse stresses, respectively. Depending on the orientation of the piezoresistors placed on the diaphragm,
πl and
πt can be displayed by Equation (3) [
30].
Unlike silicon materials, the components π
11 and π
12 in the piezoresistive coefficient tensor of graphene are significant. As a result, the connection between structural stresses and relative resistance change for (110)-oriented piezoresistors in
Figure 3 is provided by
where
σi1 means the average longitudinal stress on
R1 and
R3,
σj1 means the average transverse stress on
R1 and
R3;
σi2 denotes the average longitudinal stress on
R2 and
R4, and
σj2 represents the average transverse stress on
R2 and
R4 [
31]. The relationship between the input and output voltages of the bridge can be described as
According to Equation (4), Equation (5) can be written as
where
σij1 and
σij2 signify the total of longitudinal and transverse stresses (
,
), respectively, and
σij3 and
σij4 represent the difference between longitudinal and transverse stresses (
,
) separately [
15,
32]. Furthermore, considering the piezoresistive coefficient of graphene is impacted by temperature and doping concentration, all of the designs in this work are created at ambient temperature (25 °C) with a graphene doping concentration of 1 × 10
−13 cm
−3 [
33,
34,
35]. The sensor’s output voltage depends on the various stresses, as stated in Equation (6); therefore, ∆
σij may be considered a crucial element in designing the sensor construction. Additionally, the two most essential indices of sensor performance are sensitivity (
S) and nonlinearity (
NLr), which are represented by
where
Pmax,
Pmin, and
Pr denote the maximum, minimum, and randomly tested loading pressures respectively;
Vout(
Pmax),
Vout(
Pmin), and
Vout(
Pr) represent the output voltages measured for
Pmax,
Pmin, and
Pr, respectively; and ∆
Vf, ∆
Pf, and
NLr are the full-scale output voltage, full-scale applied pressure, and nonlinearity, respectively. It is also worth noting that nonlinearity may be positive or negative based on the tested points, and the maximum value determined is referred to as the nonlinearity of the sensor, which is commonly stated in % FSS.
4. Serpentine-Shaped Piezoresistor Design
This section presents three different serpentine-shaped piezoresistors, as shown in
Figure 12. The performance of the three serpentine-shaped piezoresistors is compared, and it is worth noting that the length of these piezoresistors is the same. Therefore, the length and width of all three piezoresistors are set to 150 μm and 10 μm, respectively. The comparison of these three types of piezoresistors is performed in order to select a type that can withstand more stress and enable the sensor to possess excellent sensitivity while maintaining high linearity.
Figure 13 depicts the influence of three distinct serpentine-shaped piezoresistors on sensitivity and nonlinearity and compares the piezoresistive properties between two sensing materials (graphene and silicon). The particular values of these sensitivities and nonlinearities are listed in
Table 8. When graphene is used as the piezoresistive material, Type 2 has the highest sensitivity, almost 21% and 33% greater than Type 1 and Type 3, respectively, while Type 1 has the least nonlinearity. Similarly, when using silicon as the piezoresistive material, Type 2 still has the maximum sensitivity, approximately 53% higher than Type 1 and more than twice as high as Type 3, while Type 1 still has the lowest nonlinearity. Furthermore, regardless of whether graphene or silicon is used, all nonlinearities calculated by simulation are small, whereas sensitivity differences are substantial, making Type 2 more suitable for the proposed sensor.
Figure 13 also illustrates that graphene outperforms silicon in sensitivity and nonlinearity, making it a better candidate for piezoresistive materials. Interestingly, the Type 2 piezoresistor made of silicon exhibits similar sensitivity to the Type 1 piezoresistor made of graphene, highlighting the superiority of Type 2.
To summarize, the Type 2 serpentine-shaped piezoresistor made of graphene is chosen to maximize the performance of the pressure sensor.
5. Manufacturing Process
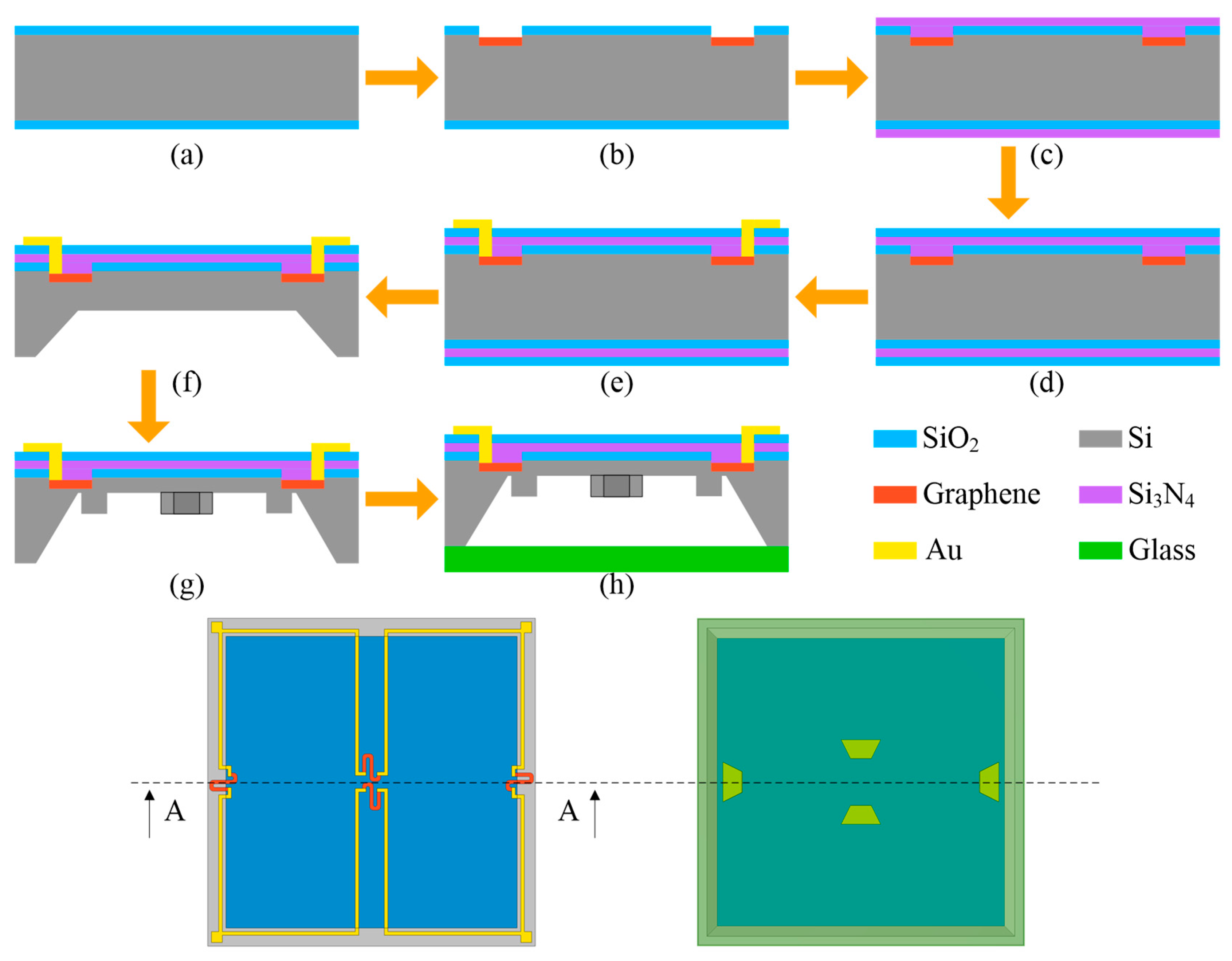
A conventional n-type (100) silicon wafer with a thickness of 400 μm can be processed using bulk micromachining to create the sensor chip suggested in this work.
Figure 14 illustrates the primary manufacturing procedure. Firstly, the selected silicon wafer is thermally oxidized to form thin layers of SiO
2 on both of its surfaces (
Figure 14a). Then, photolithography is used to process the placement region of the piezoresistors on the front side of the wafer to effectively transfer graphene. The piezoresistors are patterned by exposing the graphene layer with electron beams after applying the pattern mask (
Figure 14b). Next, passivation layers of Si
3N
4 are generated using low-pressure chemical vapor deposition (LPCVD) to shield the piezoresistors (
Figure 14c). Following that, SiO
2 layers are deposited through the employment of the plasma-enhanced chemical vapor deposition (PECVD) technique to serve as electrical insulation (
Figure 14d). Subsequently, reactive ion etching (RIE) and metallization processes are required to construct the connections between the piezoresistors so that Au can be effectively sputtered. As a result, the Wheatstone bridge circuit for the sensor chip is successfully fabricated (
Figure 14e). Afterward, the backside of the wafer is handled with KOH etching to make an initial cavity (
Figure 14f). To manufacture the proposed unique membrane structure with trapezoidal prisms, the backside of the wafer is once more processed utilizing the RIE technique (
Figure 14g). Finally, BF33 glass is joined to the bottom of the sensor chip using an anodic bonding procedure, which increases the stability of the sensor by applying the glass as a stress buffer (
Figure 14h).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}