
Joint Estimation Method of DOD and DOA of Bistatic Coprime Array MIMO Radar for Coherent Targets Based on Low-Rank Matrix Reconstruction


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
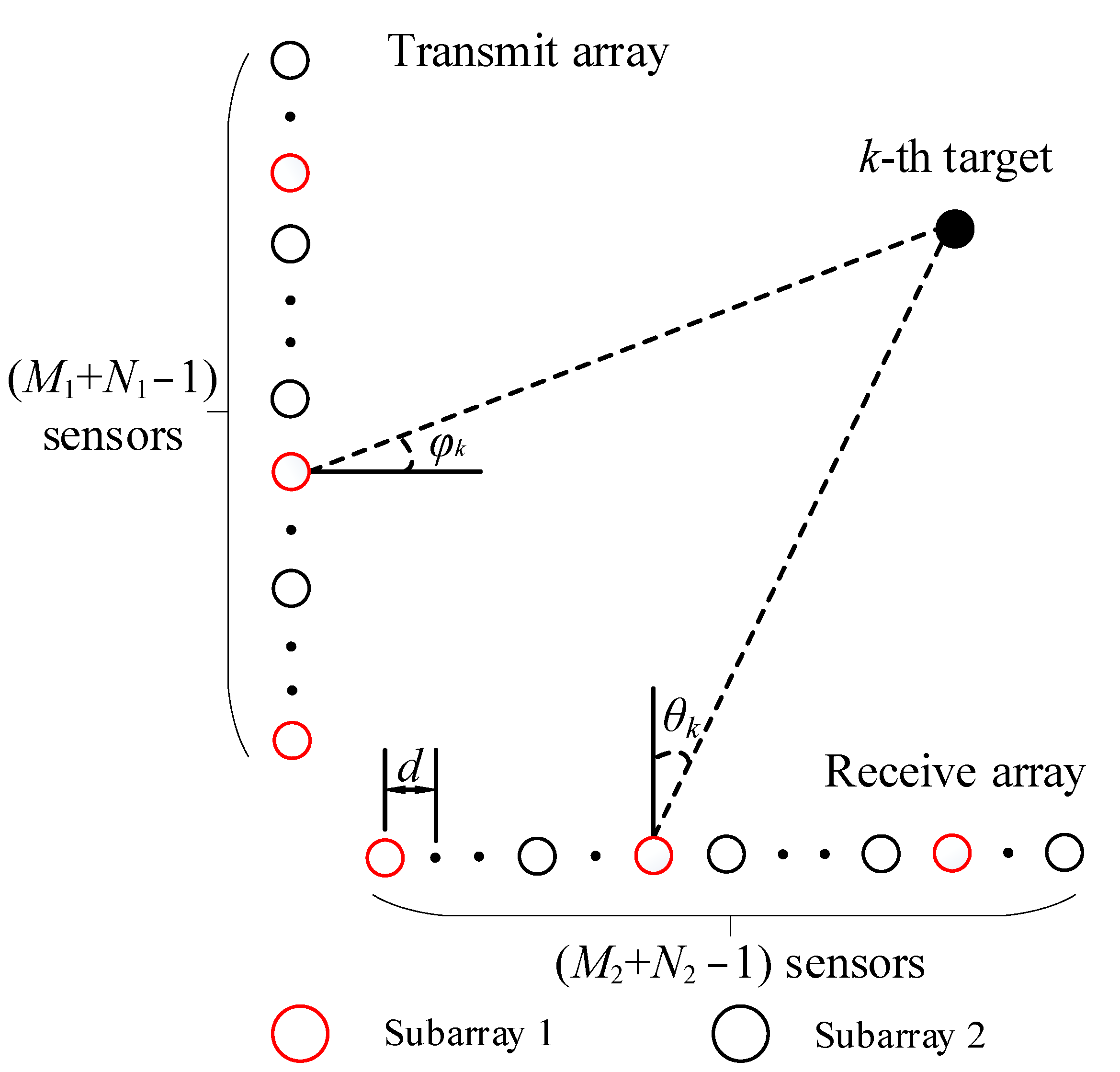
2. Signal Model of Coprime Array MIMO Radar
3. Joint DOD and DOA Estimation Algorithm of Coherent Signals Based on Low-Rank Matrix Reconstruction
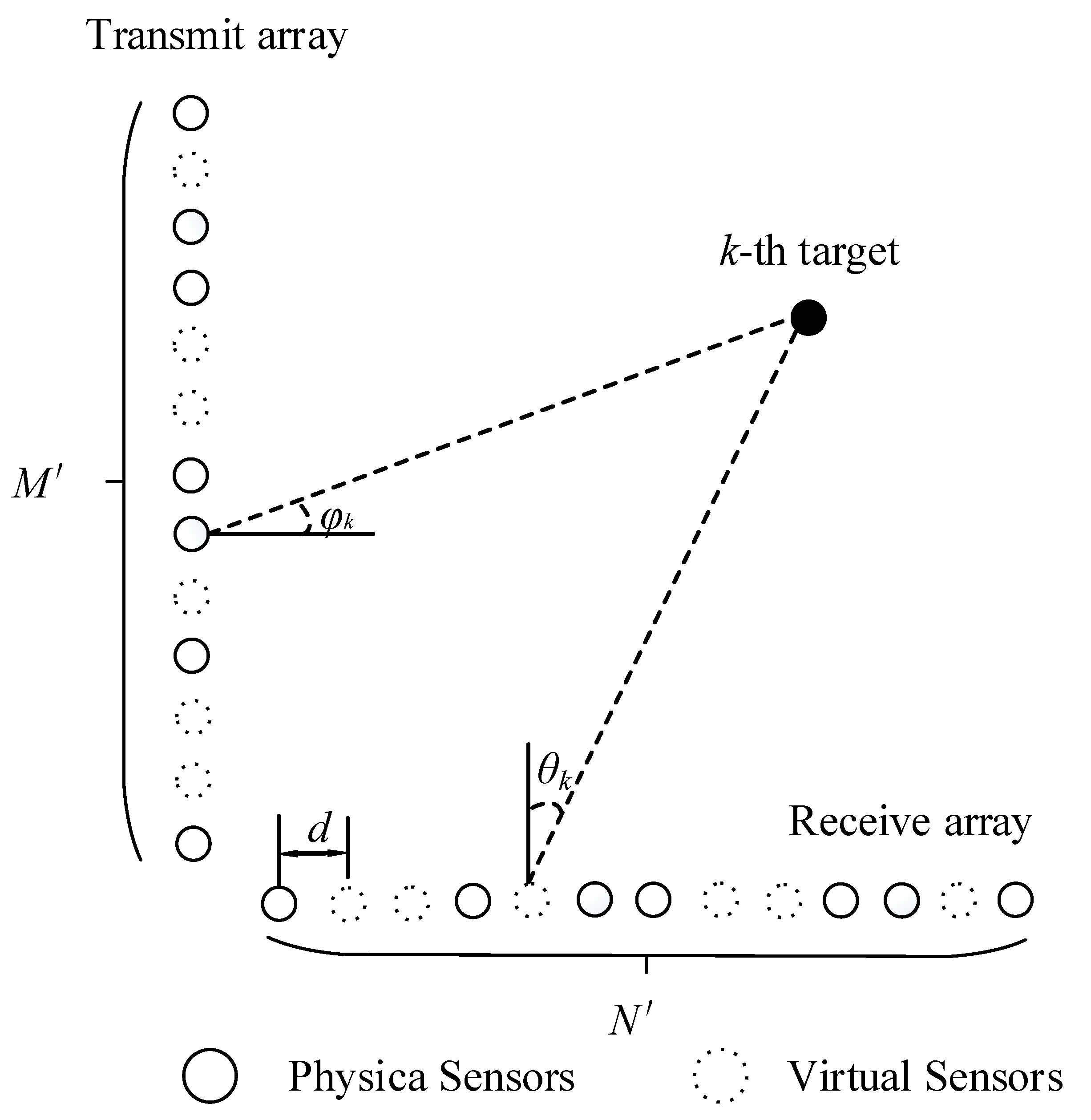
3.1. Reconstructed Toeplitz Matrix Algorithm Based on Virtual Sensor Interpolation
3.2. Joint DOD and DOA Estimation Algorithm Based on Convex Optimization to Recover Covariance Matrix
| Algorithm 1: The steps of algorithm are as follows: |
| Input: received signal: x(t), t = 1,2, …, L; |
| Output: ; |
| Step: |
| 1: Build the covariance matrix based on interpolating virtual sensors as in (16); |
| 2: Perform smooth reconstructions of the Toeplitz matrix for any row of to obtain matrix set ; |
| 3: Recover the zero elements in through convex optimization to obtain ideal matrix set as in (22); |
| 4: Smooth again to form a covariance matrix and perform average to obtain as in (23); |
| 5: Estimate with RD-MUSIC; |
4. Simulation Results and Analysis
4.1. Number of Estimated Targets
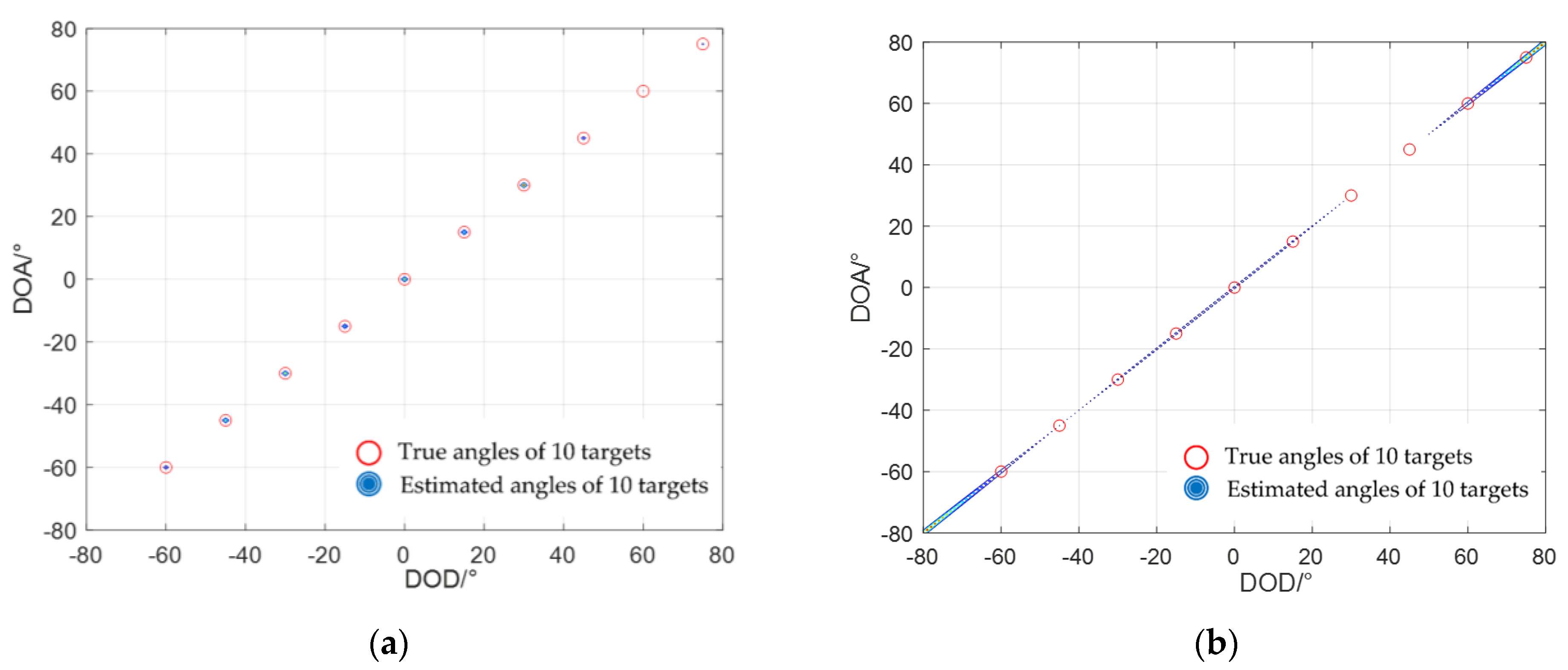
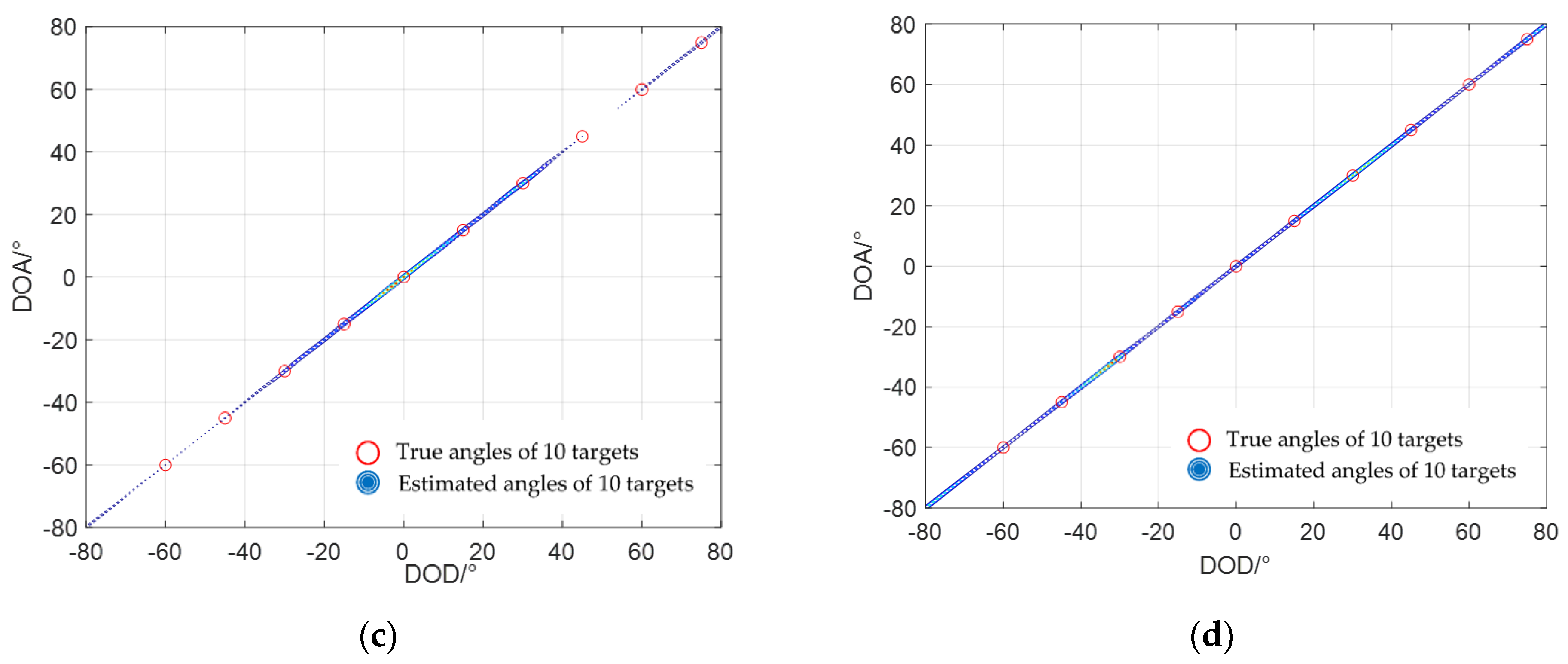
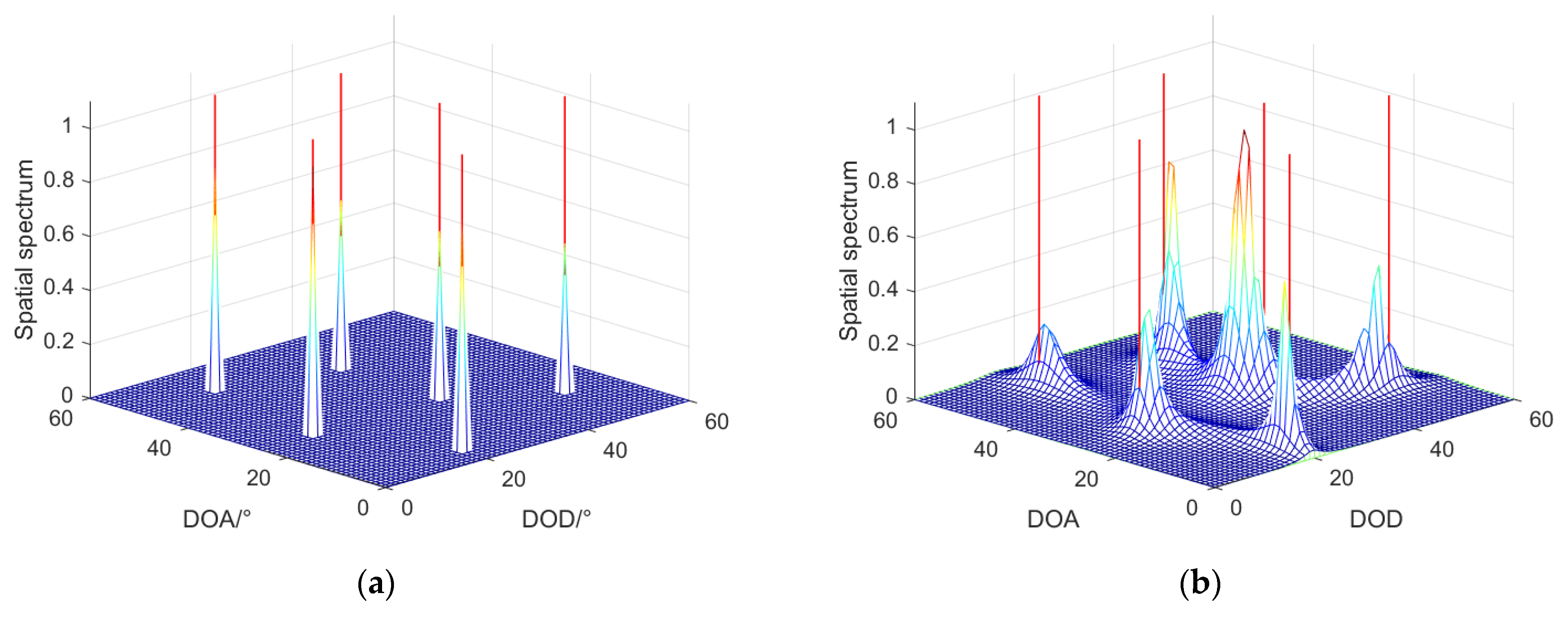
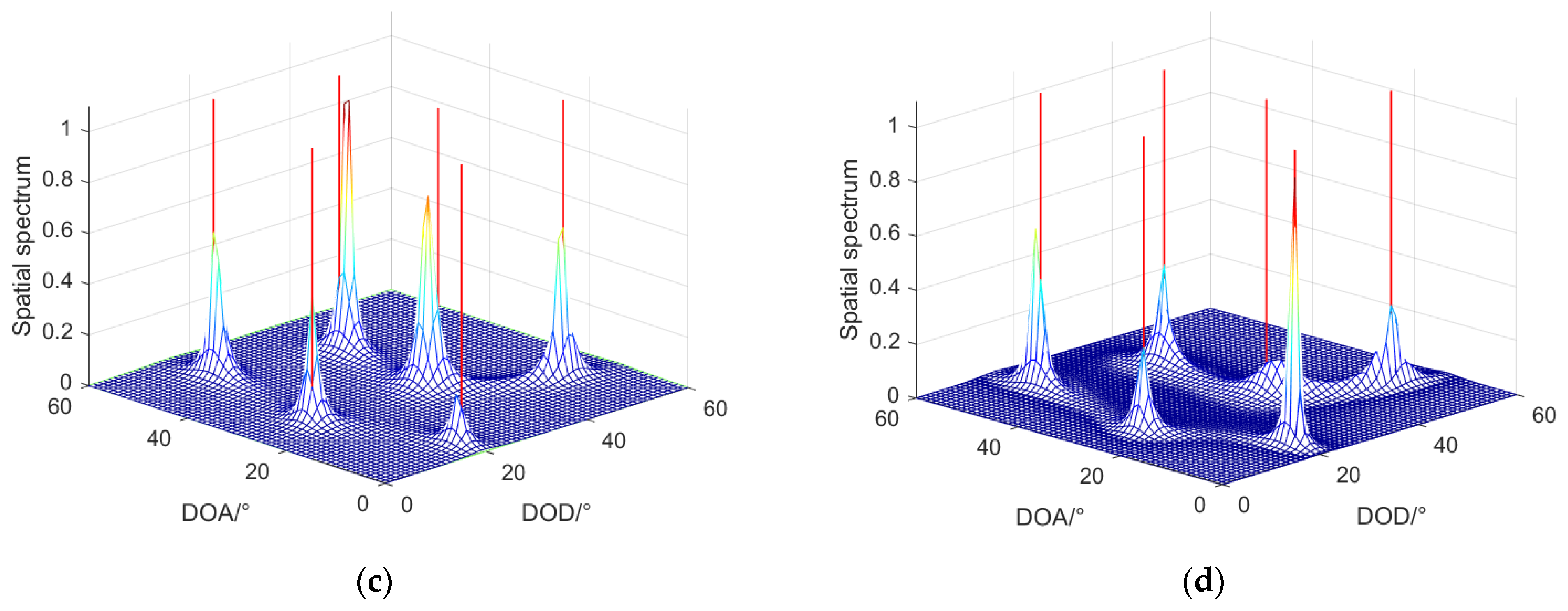
4.2. Spatial Spectrum Estimation
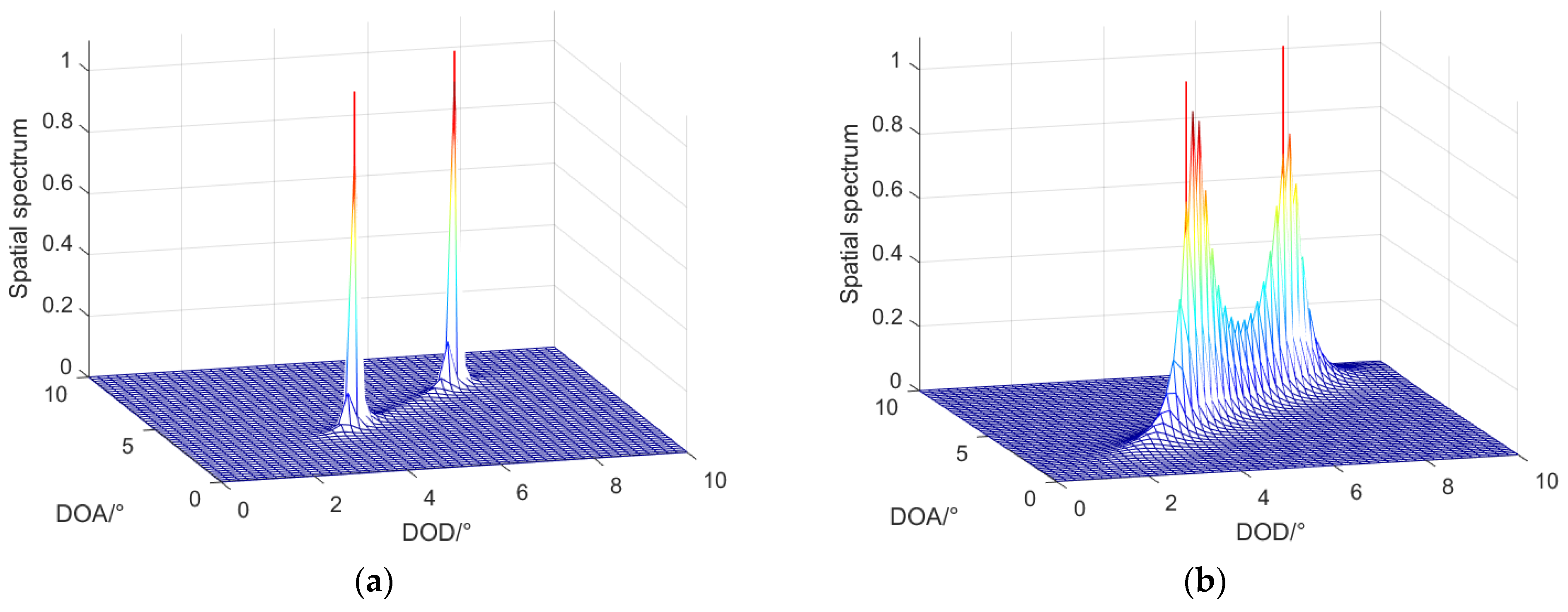
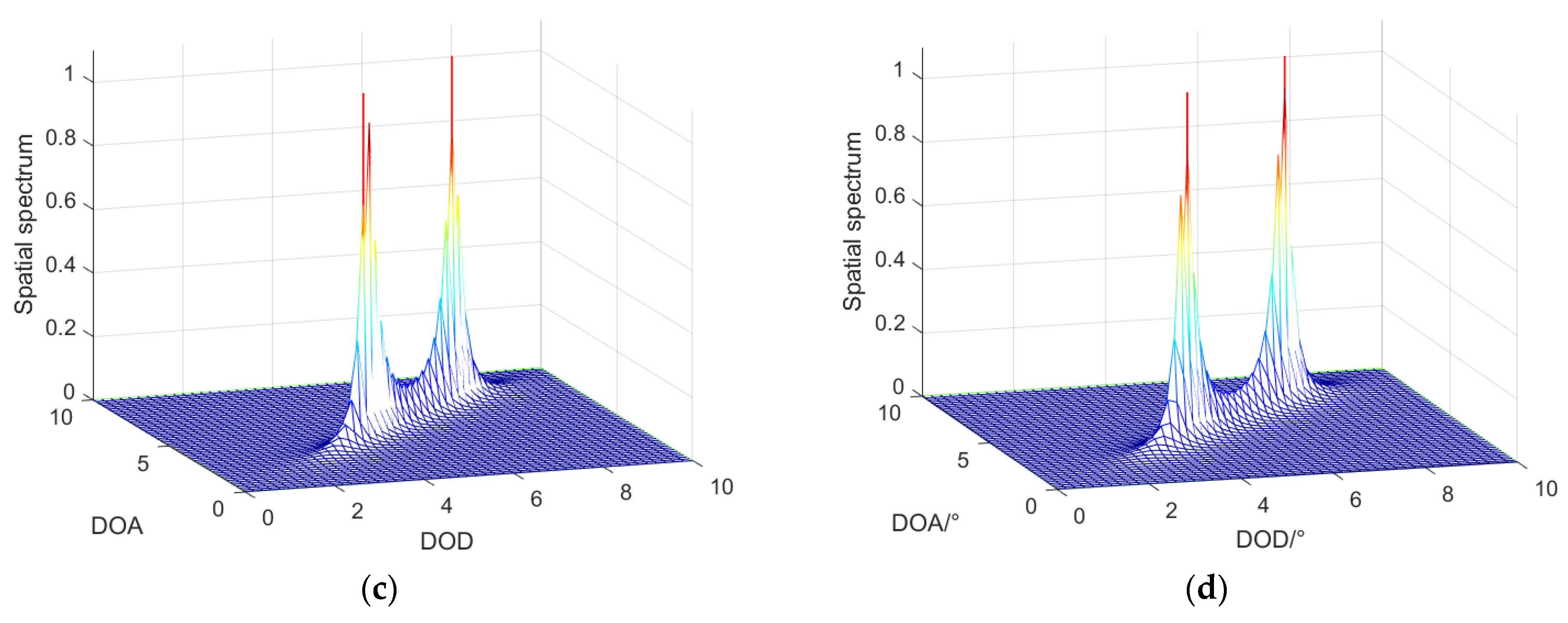
4.3. Angular Resolution
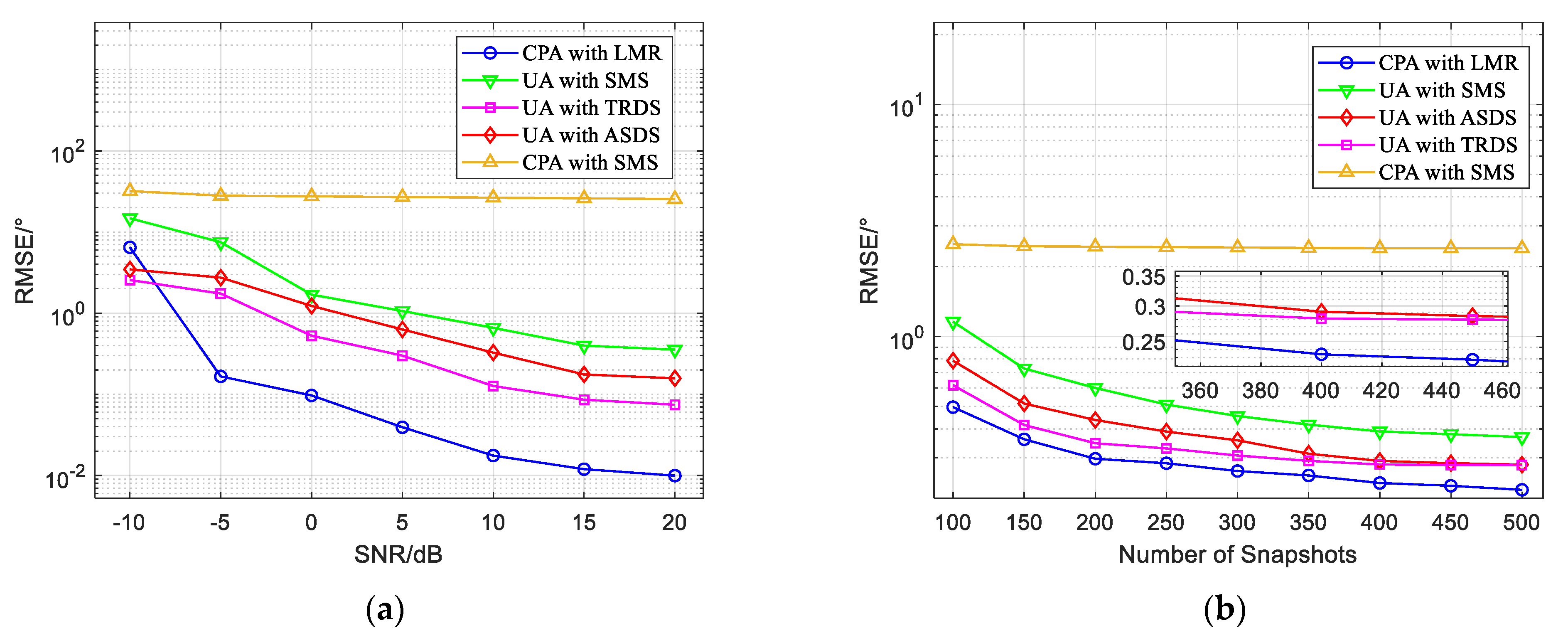
4.4. Root-Mean-Square Error (RMSE)
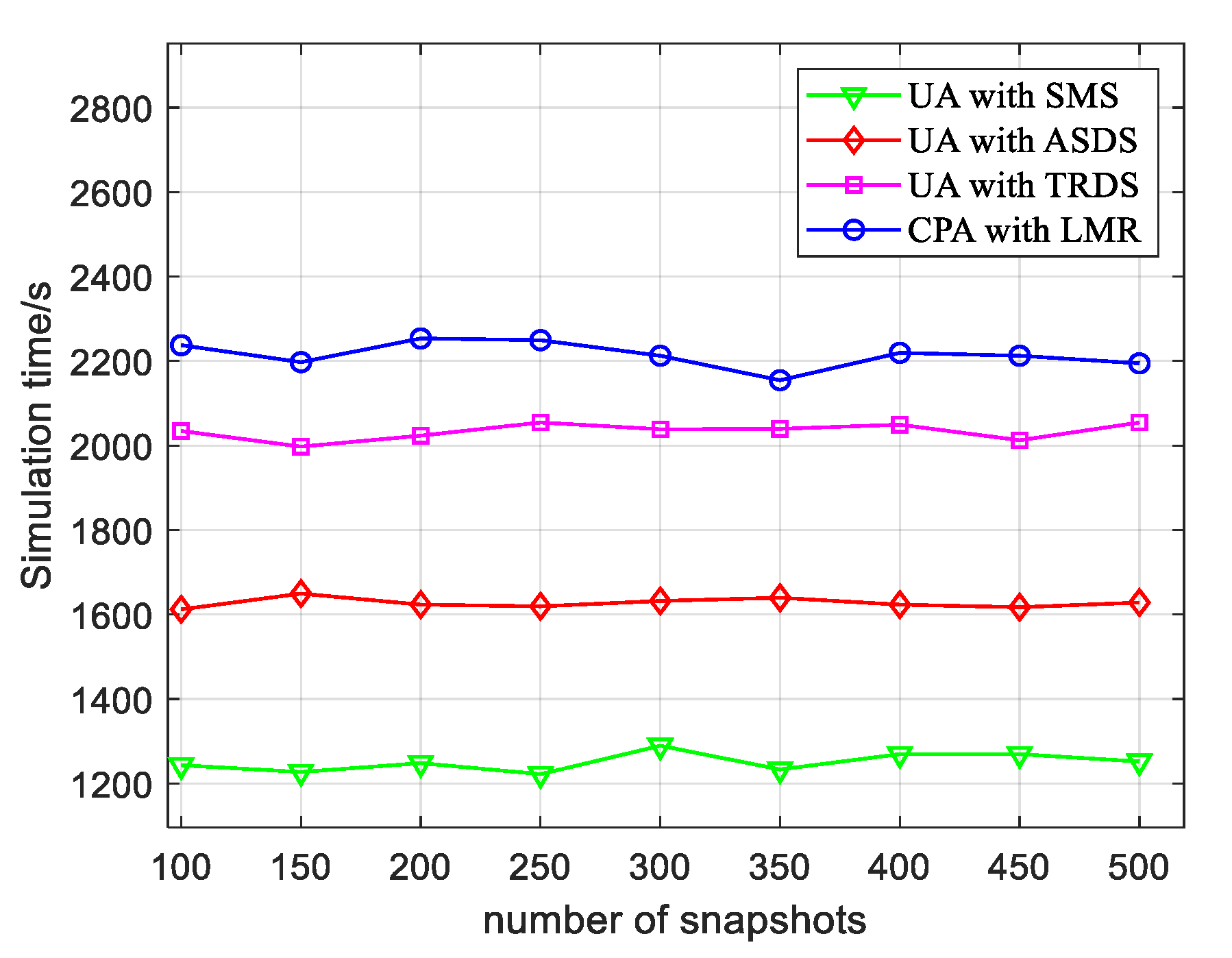
4.5. Time Complexity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rabideau, D.; Parker, P. Ubiquitous MIMO multifunction digital array radar. In Proceedings of the 37th Asilomar Conference on Signals, Systems and Computers, Pacific Groove, CA, USA, 8–12 November 2003; pp. 1058–1061. [Google Scholar]
- Luo, K.; Manikas, A. Superresolution Multitarget Parameter Estimation in MIMO Radar. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3683–3693. [Google Scholar] [CrossRef]
- Gong, P.; Shao, Z.; Tu, G. Transmit beampattern design based on optimization for MIMO radar systems. Signal Process. 2014, 94, 195–201. [Google Scholar] [CrossRef]
- Li, L. Cramer-Rao bound for parameter estimation in narrowband bistatic MIMO radar. In Applied Mechanics and Materials; Trans Tech Publications: Bach, Switzerland, 2014; pp. 556–562. [Google Scholar]
- He, J.; Shu, T.; Li, L. Mixed Near-Field and Far-Field Localization and Array Calibration with Partly Calibrated Arrays. IEEE Trans. Signal Process. 2022, 70, 2105–2118. [Google Scholar] [CrossRef]
- Li, J.; He, Y.; Zhang, X.; Wu, Q. Simultaneous Localization of Multiple Unknown Emitters Based on UAV Monitoring Big Data. IEEE Trans. Ind. Inform. 2021, 17, 6303–6313. [Google Scholar] [CrossRef]
- Shu, T.; He, J.; Dakulagi, V. 3-D Near-Field Source Localization Using a Spatially Spread Acoustic Vector Sensor. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 180–188. [Google Scholar] [CrossRef]
- Zhou, C.; Zhou, J. Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array. Sensors 2017, 17, 1779. [Google Scholar] [CrossRef] [Green Version]
- Sun, F.; Gao, B.; Chen, L. A Low-Complexity ESPRIT-Based DOA Estimation Method for Co-Prime Linear Arrays. Sensors 2016, 16, 1367. [Google Scholar] [CrossRef] [Green Version]
- Zeng, L.; Zhang, G.; Han, C. A Priori-Based Subarray Selection Algorithm for DOA Estimation. Sensors 2020, 20, 4626. [Google Scholar] [CrossRef]
- Shi, J.; Yang, Z.; Liu, Y. On Parameter Identifiability of Diversity-Smoothing-Based MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 1660–1675. [Google Scholar] [CrossRef]
- Wen, F.; Shi, J.; Zhang, Z. Generalized spatial smoothing in bistatic EMVS-MIMO radar. Signal Process. 2022, 193, 108406. [Google Scholar] [CrossRef]
- Zheng, G.; Song, Y.; Chen, C. Height Measurement with Meter Wave Polarimetric MIMO Radar: Signal Model and MUSIC-like Algorithm. Signal Process. 2022, 190, 108344. [Google Scholar] [CrossRef]
- Zheng, G.; Song, Y. Signal Model and Method for Joint Angle and Range Estimation of Low-Elevation Target in Meter-Wave FDA-MIMO Radar. IEEE Commun. Lett. 2022, 26, 449–453. [Google Scholar] [CrossRef]
- Duofang, C.; Baixiao, C.; Guodong, Q. Angle estimation using ESPRIT in MIMO radar. Electron. Lett. 2008, 44, 770–771. [Google Scholar] [CrossRef]
- Wang, H.; Kaveh, M. On the performance of signal-subspace processing–Part II: Coherent wide-band systems. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1583–1591. [Google Scholar] [CrossRef]
- Chen, Y.; Lee, J. Bearing estimation without calibration for randomly perturbed arrays. IEEE Trans. Signal Process. 1991, 39, 94–197. [Google Scholar] [CrossRef]
- Shan, T.; Kailath, T. Adaptive beamforming for coherent signals and interference. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 527–536. [Google Scholar] [CrossRef] [Green Version]
- Lei, H.; So, H.C. Source Enumeration Via MDL Criterion Based on Linear Shrinkage Estimation of Noise Subspace Covariance Matrix. IEEE Trans. Signal Process. 2013, 61, 4806–4821. [Google Scholar]
- Pal, P.; Vaidyanathan, P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef] [Green Version]
- You, Z.; Hu, G.; Zheng, G.; Zhou, H. Joint DOD and DOA Estimation of Bistatic MIMO Radar for Coprime Array Based on Array Elements Interpolation. Math. Probl. Eng. 2022, 2022, 3483778. [Google Scholar] [CrossRef]
- Liu, K.; Zhu, Z.; Ma, J. Reference sensor relocation-based thinned coprime array design for DOA estimation. Digit. Signal Process. 2021, 118, 103217. [Google Scholar] [CrossRef]
- Candes, E.; Plan, Y. Matrix completion with noise. Proc. IEEE 2010, 98, 925–936. [Google Scholar] [CrossRef] [Green Version]
- Candes, E.; Recht, B. Exact matrix completion via convex optimization. Found. Comput. Math. 2009, 9, 717–722. [Google Scholar] [CrossRef] [Green Version]
- Pal, P.; Vaidyanathan, P. A grid-less approach to underdetermined direction of arrival estimation via low rank matrix denoising. IEEE Signal Process. Lett. 2014, 21, 737–741. [Google Scholar] [CrossRef]
- Liu, C.; Vaidyanathan, P.; Pal, P. Coprime coarray interpolation for DOA estimation via nuclearnorm minimization. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016; pp. 2639–2642. [Google Scholar]
- Chen, T.; Guo, L. A direct coarray interpolation approach for direction finding. Sensors 2017, 17, 2149. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Gu, Y.; Fan, X. Direction-of-arrival estimation for coprime array via virtual array interpolation. IEEE Trans. Signal Process. 2018, 66, 5956–5971. [Google Scholar] [CrossRef]
- Zhen, Z.; Huang, Y.; Wang, W. Direction-of-Arrival Estimation of Coherent Signals via Coprime Array Interpolation. IEEE Signal Process. Lett. 2020, 27, 585–589. [Google Scholar] [CrossRef]
- Qiao, H.; Pal, P. Unified analysis of co-array interpolation for direction-of-arrival estimation. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 3056–3060. [Google Scholar]
- Hosseini, S.; Sebt, M. Array interpolation using covariance matrix completion of minimumsize virtual array. IEEE Signal Process. Lett. 2017, 24, 1063–1067. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, L.; Xu, L. Direction of departure (DOD) and direction of arrival (DOA) estimation in MIMO radar with reduced-dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1160–1163. [Google Scholar] [CrossRef]
- Bencheikh, M.; Wang, Y. Joint DOD-DOA estimation using combined ESPRIT-MUSIC approach in MIMO radar. Electron. Lett. 2013, 46, 1081–1083. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, W.; Wang, J. Joint Transmission and Reception Diversity Smoothing for Direction Finding of Coherent Targets in MIMO Radar. IEEE J. Sel. Top. Signal Process. 2014, 8, 115–124. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Hu, G.; Zhang, X.; Jin, S. Smoothing matrix set-based MIMO radar coherent source localisation. Int. J. Electron. 2018, 105, 1345–1357. [Google Scholar] [CrossRef]
- Hong, S.; Wan, X.; Ke, H. Spatial difference smoothing for coherent sources location in MIMO radar. Signal Process. 2015, 109, 69–83. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, Z.; Hu, G.; Zhou, H.; Zheng, G. Joint Estimation Method of DOD and DOA of Bistatic Coprime Array MIMO Radar for Coherent Targets Based on Low-Rank Matrix Reconstruction. Sensors 2022, 22, 4625. https://doi.org/10.3390/s22124625
You Z, Hu G, Zhou H, Zheng G. Joint Estimation Method of DOD and DOA of Bistatic Coprime Array MIMO Radar for Coherent Targets Based on Low-Rank Matrix Reconstruction. Sensors. 2022; 22(12):4625. https://doi.org/10.3390/s22124625
Chicago/Turabian StyleYou, Zhiyuan, Guoping Hu, Hao Zhou, and Guimei Zheng. 2022. "Joint Estimation Method of DOD and DOA of Bistatic Coprime Array MIMO Radar for Coherent Targets Based on Low-Rank Matrix Reconstruction" Sensors 22, no. 12: 4625. https://doi.org/10.3390/s22124625