2.1. Manipulability Ellipsoid
The forward velocity kinematics of an
n degree-of-freedom serial robotic manipulator, which we consider to be operating in an
m-dimensional Euclidian operational space, describes the relation between the end-effector velocities
t, called twist, and joint velocities
:
where
is defined as a set of the linear velocity vector
and the angular velocity vector
;
is a Jacobian matrix of the manipulator, with components of
, where
i = 1…
m,
j = 1…
n, and
;
is the joint position vector, and
defines the joint velocity vector. We assume rotational joints without a significant loss of generality.
The most widely used kinematic performance measure, which is based on the Jacobian matrix, was introduced in [
21]. The velocity manipulability ellipsoid of a given configuration provides an intuitive graphical representation of how efficient the mapping of velocities is from the joint space to the task-space. The set of joint velocities with the unit Euclidian norm associated with a unit sphere in the joint velocity space:
maps into the velocity manipulability ellipsoid
in the task space:
Note that
is equal to the square of the Euclidian norm
of a vector
. The volume of
, however, may be used to define the quantitative measure of manipulability
:
which is often used, although it suffers from a few limitations related to the physical inconsistency of the Jacobian matrix [
19]. Furthermore, despite its popularity, the manipulability measure only gives a rough estimation of the robot’s movement capability and closeness to the singularity, and it is not accurate enough to determine how fast the robot can move in a certain direction. The manipulability ellipsoid principal axes—the direction of which coincides with the eigenvectors of the square matrix
, and whose lengths correspond to the singular values of
—represent the best and worst directions for the robot to perform a movement.
A robot’s movement capability in any other direction can be geometrically described as the distance from the center of the ellipsoid to the point where the line along the direction of interest intersects the ellipsoid surface. Let
denote the unit vector in the task velocity direction of interest, and
be the distance from the ellipsoid center to the intersection point on the ellipsoid surface in the direction along the vector
. Thus, one can write
, and in combination with (3), the following equation can be derived:
The scalar
is then the velocity transmission ratio in the direction of
introduced by Chiu [
24]:
The velocity transmission ratio (6), also known as the manipulator velocity ratio [
25] or directional manipulability measure [
42], can also be derived from the ratio of the task velocity vector norm to the joint velocity vector norm:
The value of this index defines how effectively the robot’s end-effector can move in the direction
to satisfy condition
in the joint space. The direction in which the velocity transmission ratio is at its maximum is the optimal task direction for affecting velocity, as the lowest robot overall kinematic effort is needed. However, since a natural norm does not exist in the space used to represent the twist [
29], which involves both linear and angular velocities, it leads to the physically non-consistent definition of the performance index with no clear physical meaning [
19].
2.3. Translational and Rotational Manipulability
Due to the physical inconsistency of the twist space manipulability ellipsoids and polytopes, the capabilities of translational and angular velocity should be handled individually. For this purpose, Yoshikawa [
36] decomposed the task space into translational and rotational subspaces. He defined the translational (rotational) manipulability ellipsoid in the weak sense as a set of all translational velocities that are realizable under the constraint
. The translational (rotational) manipulability ellipsoid in the strong sense has an additional constraint, which requires the end-effector orientation to stay constant (angular velocity is zero,
).
Similarly to the Yoshikawa approach, in the case of a manipulability ellipsoid, the translational and rotational velocity capabilities were also handled separately for the polytope approach [
28]. Since the polytopes provide a more accurate estimation of the maximum achievable end-effector velocities compared to the ellipsoids, only decomposed manipulability polytopes will be considered in the following. In this case, the weak sense polytope may result in two different types, i.e., with the minimum
norm and with the least
norm solution of joint velocities, respectively.
The translational (rotational) velocity polytope
(
) in the
weak sense is defined as the set of all linear (angular) velocities that are realizable under the constraints (8) with the minimum infinity norm solution, if the joint velocity polytope is transformed to the task space via
(
):
where the Jacobian matrix is partitioned into translational and rotational (3x
n) submatrices:
Note that mapping
in (13) (
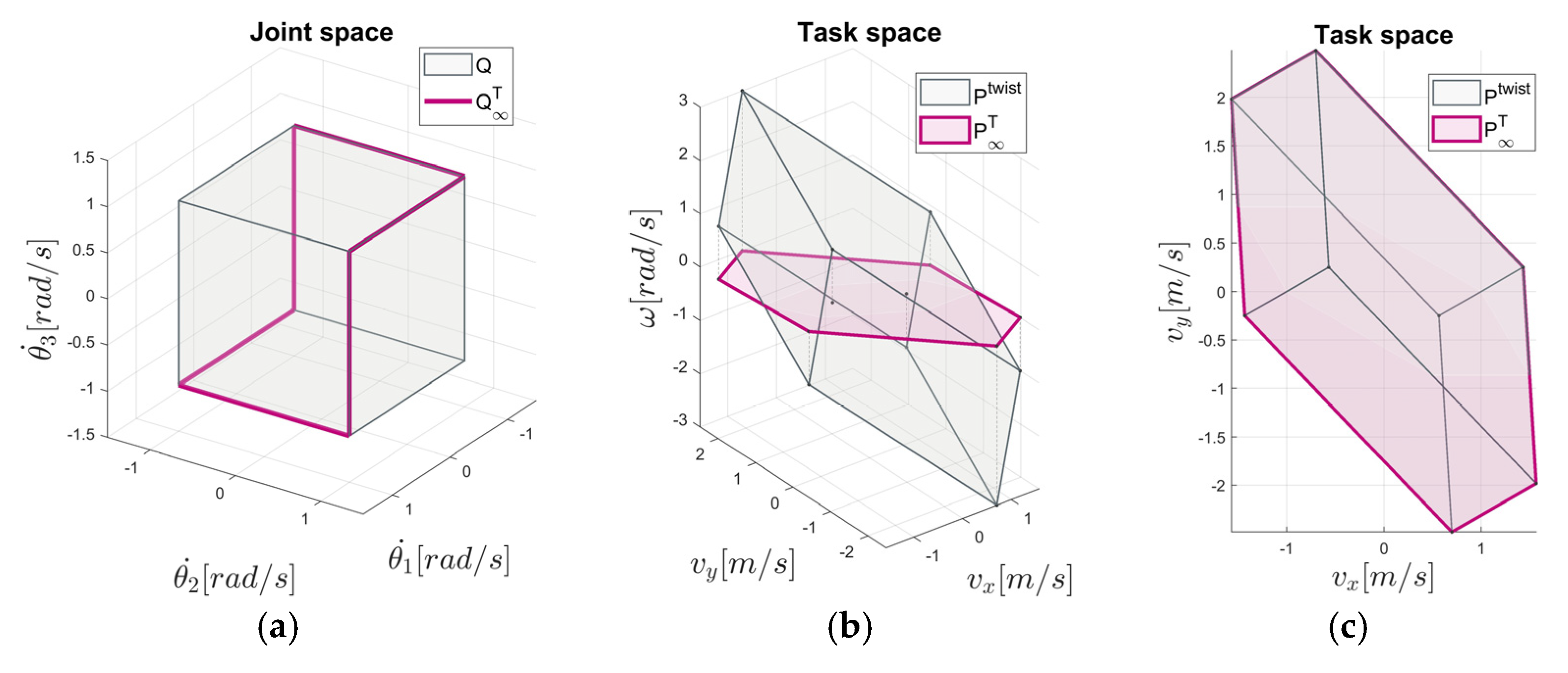
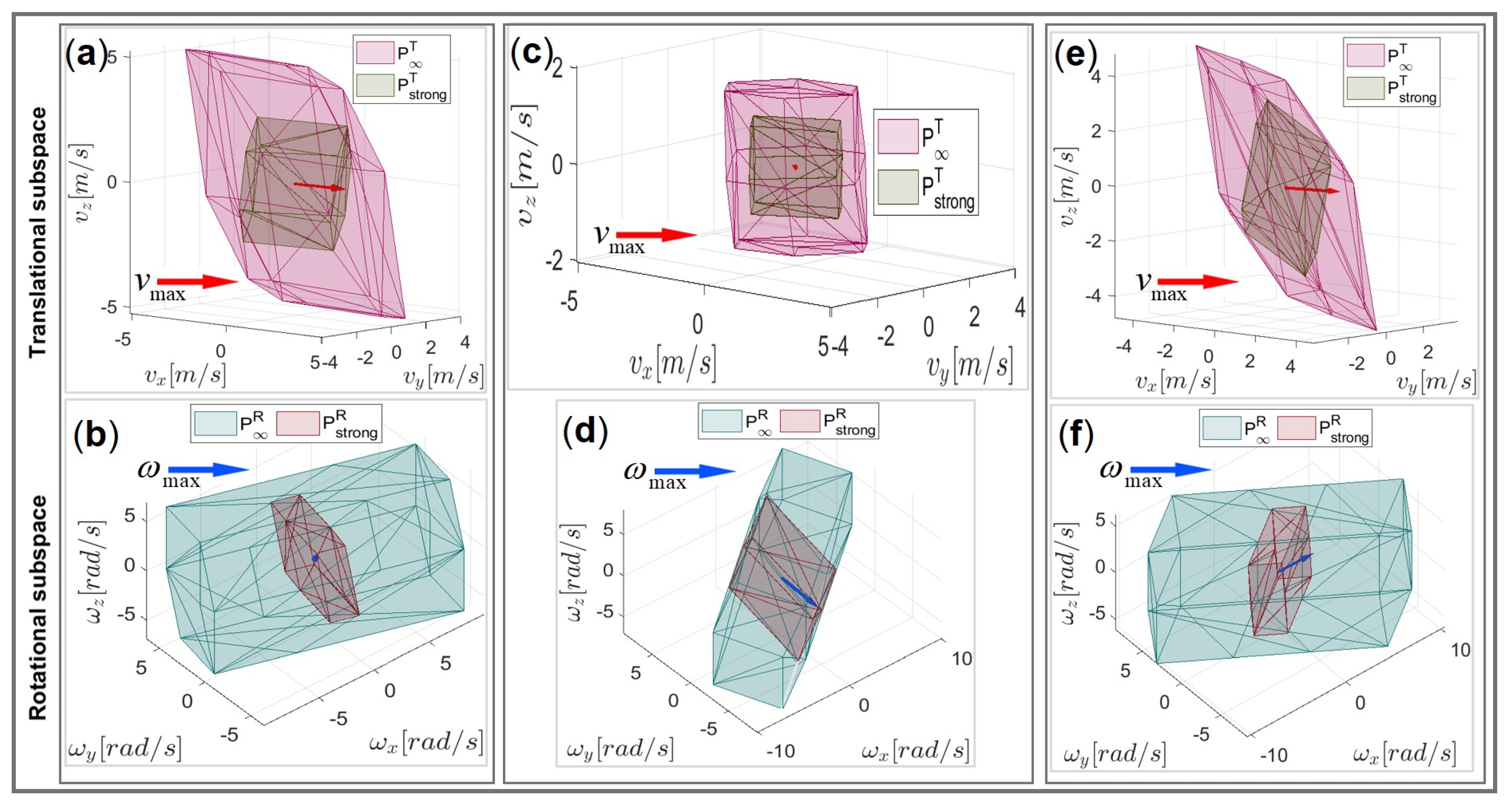
in (14)) describes the under-determined linear system. The translational polytope
is illustrated in
Figure 1.
In
Figure 1b,c, the example of a translational velocity polytope
in comparison to the twist polytope
is presented in two different views in the task space. From
Figure 1c, it can easily be seen that the translational velocity polytope
fits to the orthogonal projection of the twist manipulability polytope
in the translational subspace.
When an
n-dimensional polytope is mapped to a space of lower dimension (
k < n), some of the vertices of the original polytope are mapped into an internal region of the
k-dimensional polytope [
47]. For this kind of redundancy, part of the joint velocities may produce end-effector velocities with non-zero rotation (translation) components. The maximum feasible linear end-effector velocity (which could be denoted by
) in a certain translational direction
, or the maximum feasible angular end-effector velocity (which could be denoted by
) in the specific rotational direction
, can be determined by geometry-based methods [
43,
45,
48] as the vector length from the origin of the translational (rotational) velocity polytope
(
) to the intersection with its boundary in the specified direction.
One may select one of the subspace manipulability polytopes, depending on the task at hand. If the main concern of the task is maximal linear velocity, then the vector length of the translational velocity polytope will be considered, and vice versa. Since translational subspace is considered separately from rotational subspace, multiple solutions may exist in the joint space, which satisfies constraint (8). The minimum infinity norm solution, illustrated by
in
Figure 1a, can be found numerically based on the structured linear algebra algorithm [
46], which is rather computationally extensive. Alternatively, this problem can be expressed as a linear programming problem, where the optimal solution exists at the intersection of the explicitly given linear inequality constraints.
Besides polytope analysis, performance indices based on the vector expansion method [
49] offer a computationally faster solution compared to the polytopes approach, since only the robot’s capabilities are investigated in the direction of interest in the task space. The maximum achievable linear (angular) end-effector velocity in the
direction, based on the vector expansion method, can be estimated by the following:
The value
(
) matches the vector length of a manipulability polytope
(
) in the
weak sense, with the least Euclidian norm solution of joint velocities in the direction defined by
(
). The polytope
(
) is inscribed in the translational (rotational) manipulability polytope
(
) in the
weak sense, defined as follows:
which determines a set of joint velocities defined by the intersection
in the joint space, where
is the row space of the translational (rotational) Jacobian matrix.
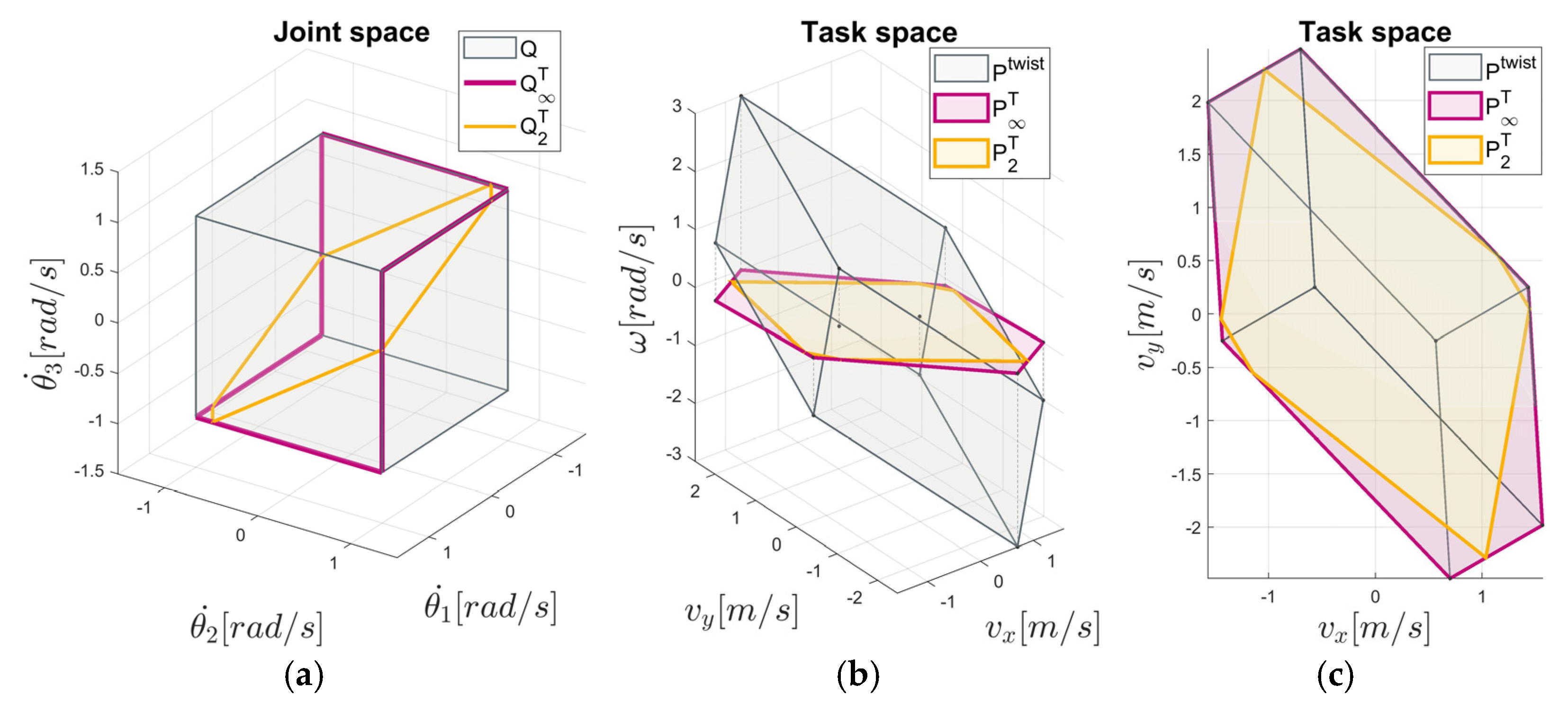
The polytope
is depicted in
Figure 2. In
Figure 2b,c, the polytope
in relation to the polytopes
and
is shown in two different views in the task space, where it can be seen that
is inscribed in the
. Unlike the polytope
, which defines the minimum
norm solution of the joint velocities, the polytope
represents the maximal linear velocities with the least
norm solution of the joint velocities under the constraint (8), i.e.,
, illustrated by
in
Figure 2a.
The polytope
is depicted by
Figure 2. In
Figure 2b,c, the polytope
in relation to the polytopes
and
is shown in two different views in the task space, where it can be seen that
is inscribed in the
. Unlike the polytope
, which defines the minimum
norm solution of the joint velocities, the polytope
represents the maximal linear velocities with the least
norm solution of the joint velocities under the constraint (8), i.e.,
, illustrated by
in
Figure 2a.
In terms of trajectory planning optimization, an analysis of the translational manipulability polytope in the
or
weak sense can offer a trajectory planning that reaches the goal pose faster [
28] or with lower kinematic effort, assuming that the orientation of the end-effector is not important. However, how can translational capabilities be managed separately from the rotational and also keep control over a rotational subspace?
If we add another constraint that requires joint velocities to be projected onto the null space of
(
), the translational (rotational) manipulability polytope in the strong sense can be obtained, which enables the analysis of purely translational (rotational) motions. In order to graphically represent the translational (rotational) manipulability polytope in the strong sense, it is necessary to find the intersection between the joint velocity polytope
and the null space
, i.e.,
. The mapping of such joint velocities to the task space forms a translational (rotational) manipulability polytope in the strong sense
, with the shape depending on the dimension of the considered null space:
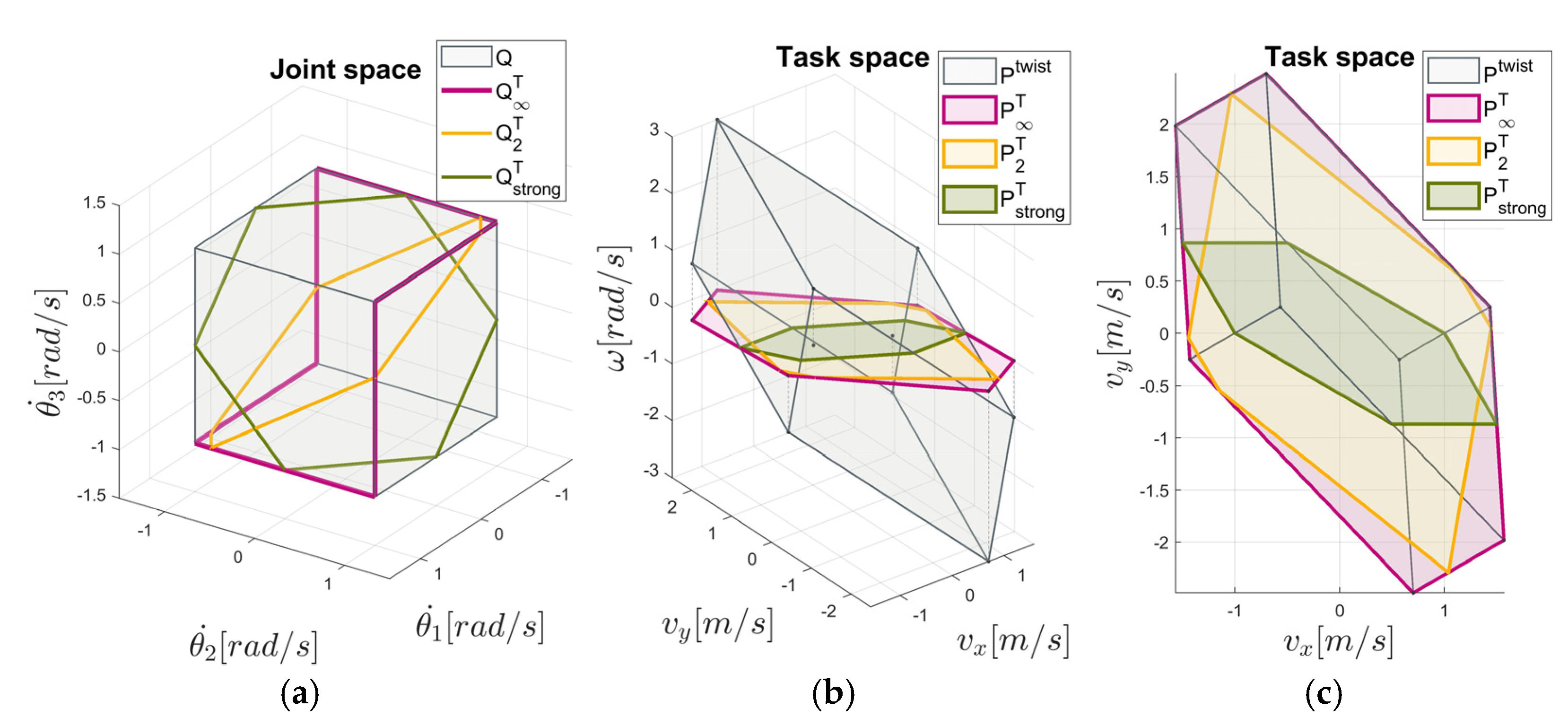
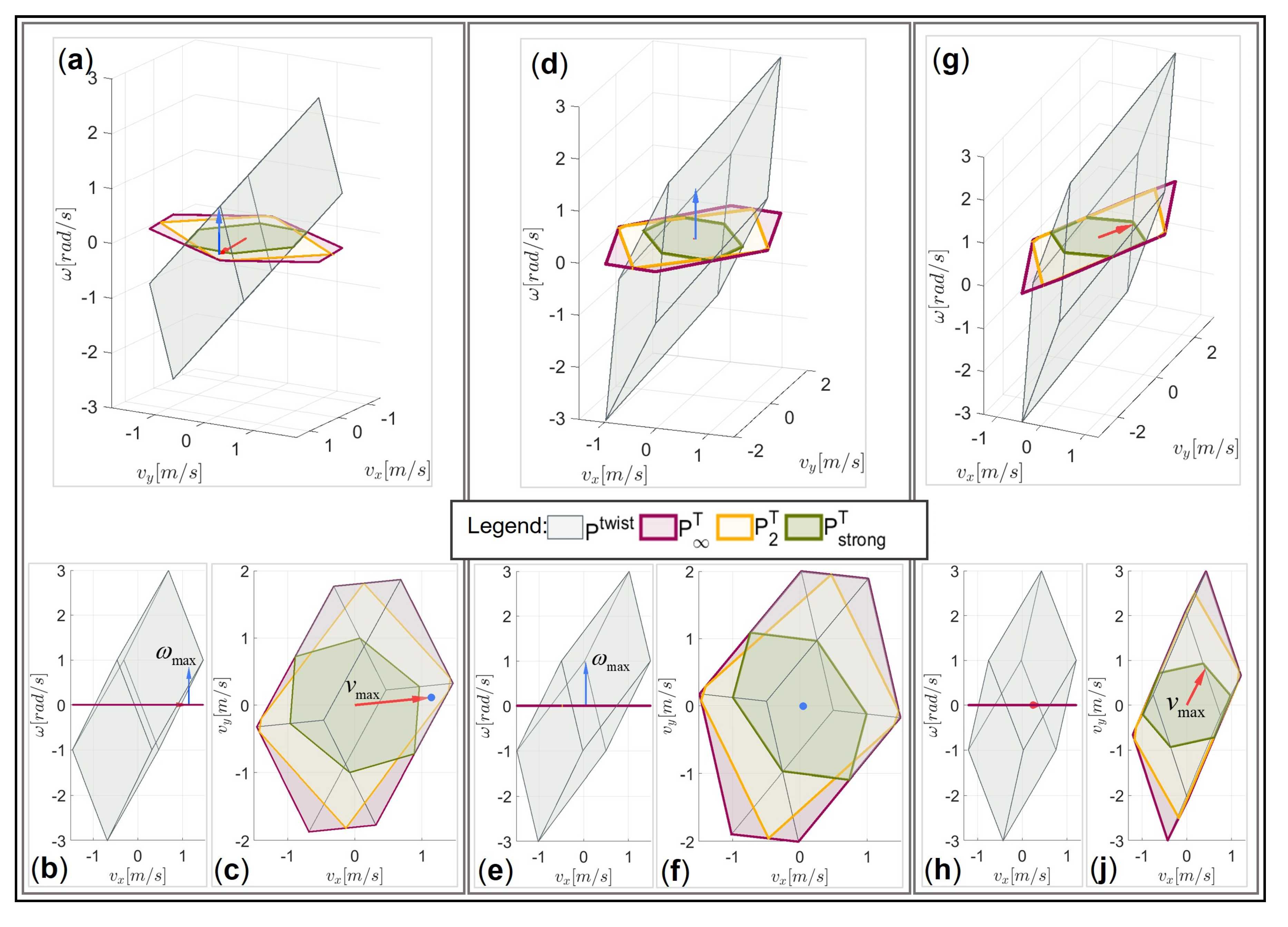
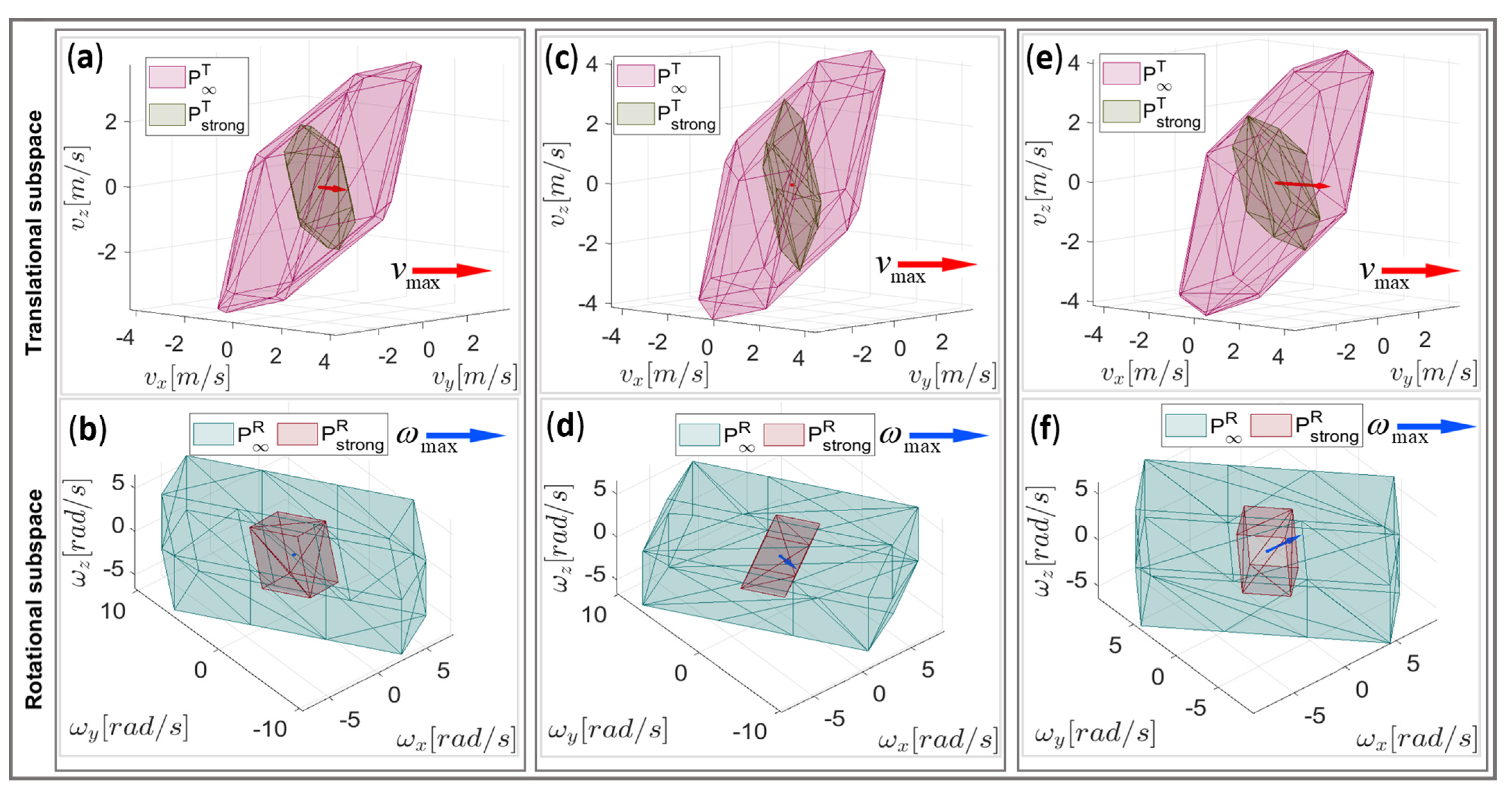
The translational manipulability polytope
is depicted in
Figure 3. A comparison with the polytopes
,
, and
is shown in
Figure 3b,c. The polytope
is quite reduced in comparison to the polytopes
and
. The joint velocity solution under the constraint
and (8), i.e.,
, is illustrated by
in
Figure 3a.
The translational (rotational) manipulability polytope in the strong sense allows for a complete separation of the translational and rotational capability analyses since only pure translational (rotational) movement is being considered at a time. What if a robot task requires a simultaneous motion with synchronized translational and rotational end-effector velocities, as in the case of robot surface machining? For this purpose, a solution will be derived in the following.
2.4. Proposed Method
The estimation of the maximum feasible linear and angular velocity for simultaneous linear and angular motion using the proposed DTF method will be explained in this section. The problem can be formulated as follows: We seek a maximum linear (angular) velocity in the desired direction, in a rotational (translational) motion synchronized with the specified direction, under joint velocity constraints (8). In the following, we assume an n degree-of-freedom, non-redundant, robotic serial-link manipulator in a non-singular configuration.
Unlike the majority of existing methods that take the translational (rotational) Jacobian submatrix
(
) into consideration, the derivation of the proposed DTF method is based on the Jacobian submatrices, which fulfils the additional restrictions with the null space projection [
36,
38]. Let
denote a 3x
n translational Jacobian submatrix:
where
is the identity matrix, and
is the projector to the rotational null subspace, with the operator
that stands for the Moore–Penrose pseudoinverse of a matrix. Similarly, the rotational Jacobian submatrix
can be obtained. If we assume a square Jacobian matrix, then it can be shown that the inverse of the Jacobian (15) can be represented by two parts, which can be derived from the pseudoinverse of
and
[
35,
36]:
such that the joint velocity vector can be decomposed correspondingly as:
where
and
. Note that in the latter equation, we assume that the joint velocity vector can be described in a form consisting of two parts related to translation and rotation. This can be rewritten as follows:
where the first part of (25) are the joint velocities
required solely by the translational end-effector displacement (i.e., with zero contribution to the rotational motion), while the second part are joint velocities
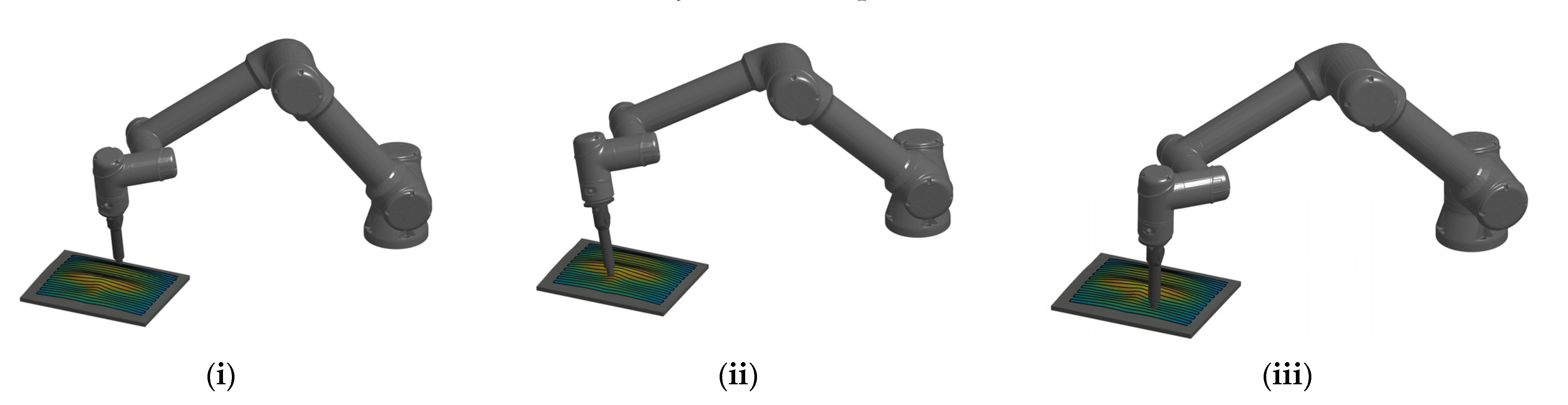
responsible solely for rotational end-effector displacement (i.e., with zero contribution to the translational motion). To find the maximal velocity capabilities in the task space, we need to analyze how well the task’s requirements fit the robot’s joint velocity constraints (8). A robot surface machining path consists of waypoints located along a curved surface. During the process, the robot needs to follow the prescribed path with a constant linear velocity while maintaining the end-effector orientation normal to the curved surface. Synchronization between the desired linear and angular velocity vectors within two neighboring waypoints can be determined by the curved surface geometry.
In contrast to the existing methods, where the desired motion synchronization cannot be controlled (the maximum kinematic capabilities can be evaluated only based on the desired linear/angular velocity direction), the proposed method also takes the desired motion synchronization into consideration. The ratio of these magnitudes denoted by
defines the relative importance of the synchronized translational and rotational motion independently of the velocity profile scaling:
where
is the magnitude of the linear velocity, and
is the magnitude of the angular velocity. The parameter
h is a task-dependent velocity ratio factor that reflects the synchronization of translational and rotational motion.
The linear velocity vector and the angular velocity vector can be represented by:
where
and
are the unit vectors in the desired direction of the linear and the angular velocities in the task space, respectively. When the end-effector maintains a constant orientation, there is no rotational motion required (
), thus the ratio
approaches infinity and the motion is purely linear. The maximum directional kinematic capabilities can be obtained by the translational manipulability polytope
in the strong sense. If the velocity ratio factor
is zero, the motion is pure rotation. The maximum directional kinematic capabilities can be determined by the rotational manipulability polytope
in the strong sense. Combining the task requirements and the robot’s velocity capabilities leads to the following:
The maximum linear and angular velocity can be found by scaling under the constraints (8), considering (26). This yields the following equations:
where we consider that the linear velocity is synchronized with the angular velocity, thus
and
. In contrast to the existing methods, the proposed DTF method gives us the physically meaningful and accurate information about how fast the robot can move when a simultaneous translational and rotational motion is needed in directions
and
, respectively. The maximum linear (angular) velocity vector, considering the desired angular (linear) motion constraint, can be obtained as follows:
which can be combined further into the maximum feasible twist vector
for the given base task parameters (
,
,
) and under the constraints (8).
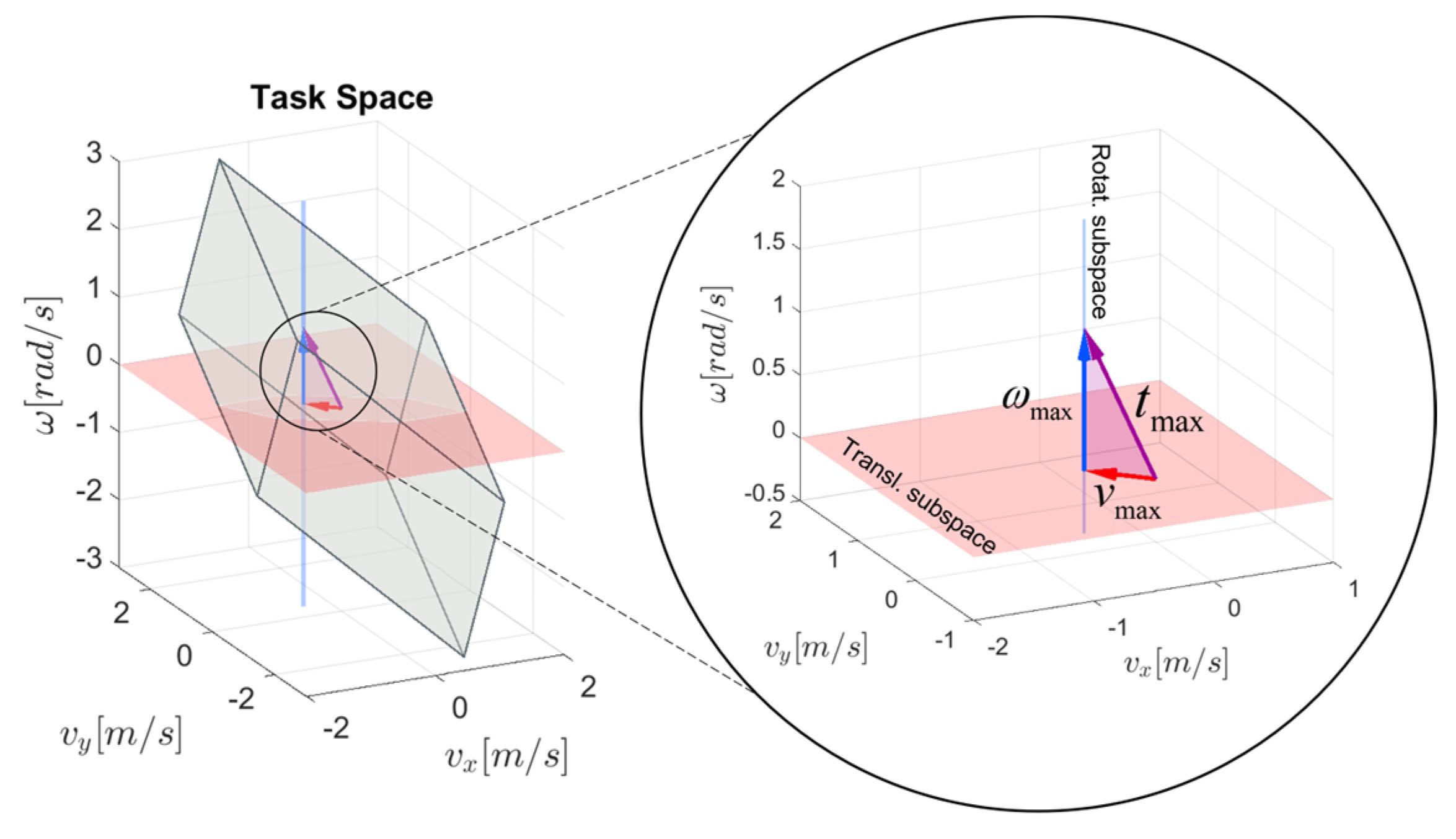
To provide an intuitive understanding of the proposed DTF method, the maximum linear and angular velocity vectors (
and
) are shown graphically by the twist manipulability polytope in
Figure 4. In the case of the 3 DOF planar robotic mechanism, the twist manipulability polytope lies in the 3-dimensional space, which consists of the 2-dimensional translational subspace (the
plane) and the 1-dimensional rotational subspace (
-axis). The maximum linear velocity capability is illustrated as a vector
in red, with the direction
and the magnitude
, which lie in the
plane, and it can be interpreted as the orthogonal projection of the twist vector onto the translational subspace. The maximum angular velocity capability is shown as a vector
in blue in the
-axis, with the direction
and the magnitude
. The tip of the resultant twist vector
in purple is touching the surface of the twist manipulability polytope.
Unlike the existing methods [
32,
49] that separately evaluate maximal end-effector capabilities based on the desired velocity direction for the translational and the rotational subspaces, the proposed DTF method, although based on twist decomposition, links both individual subspace constraints by the inclusion of the specific robot task requirements with the velocity ratio factor
h. In terms of the robot machining of the workpiece with complex surface geometric properties, the task requirements depend on the variation in the surface curvature and the defined tool path, which is then reflected in the velocity ratio factor
h. Thus, for a given translational direction
, rotational direction
, and velocity ratio factor
h, we seek the maximum linear
and rotational velocity
that could be achieved. To provide an illustrative and intuitive demonstration of the proposed DTF method with respect to different task requirements, the maximal linear and angular end-effector velocities are illustrated graphically by the task-space twist polytope in
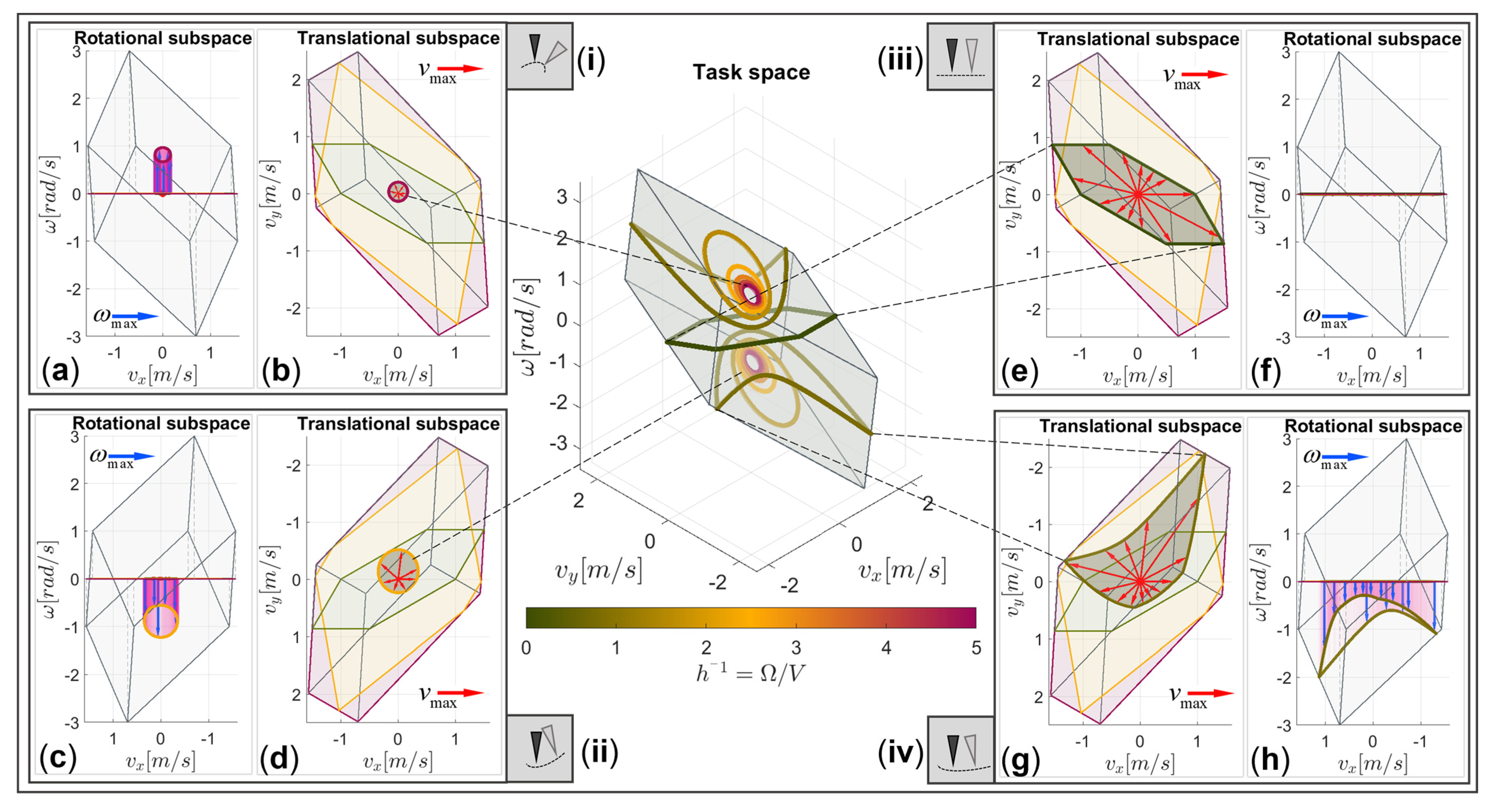
Figure 5.
In the middle of
Figure 5, we show the twist polytope with the curves on its surface, described by the tips of the resultant twist velocity vectors at different values of the velocity ratio factor
h, while the translational direction vector interpolates as
,
. Note that the different values of the velocity ratio factor
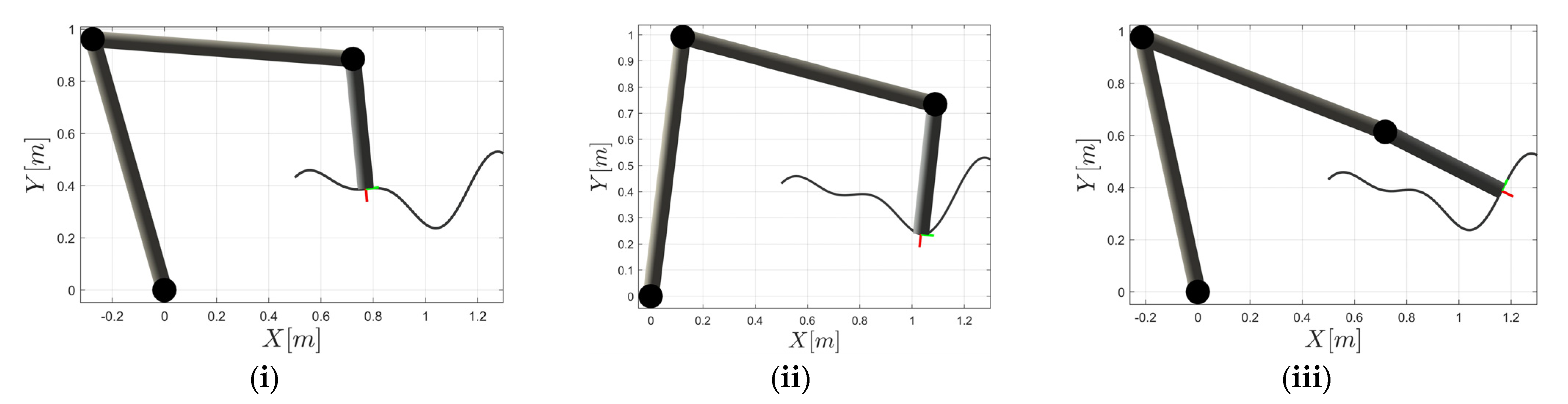
h are related to different task requirements, which, in our case, are chosen as: (i) Concave path segment with
h = 0.21, (ii) Convex path segment with
h = 0.42, (iii) Flat path segment with
h = 1000, (iv) Flat convex path segment with
h=1.25. Each of the polytope iso-curves is related to the evaluation of the twist vector tips with the same task requirements at the specific value of the synchronization parameter
h (also see the colorbar for the selected value). It can be noted that each iso-curve lies entirely on the surface of the manipulability polytope, thus satisfying the constraint given by (8). If the reverse direction of angular velocity is considered, the set of resultant tips are mirrored to the opposite side of the twist manipulability polytope.
The maximum linear and angular velocity vectors of each example (i)–(iv) is additionally shown in detail by two different projection views, i.e., the plane and the plane, respectively. In the plane, the maximum feasible linear velocity vectors (plotted in red) can be obtained if the unit direction vector is interpolated as described above. Note that this projection view also depicts the translational polytopes , , and in reddish, greenish, and yellowish colors, respectively. The corresponding angular velocity vectors are plotted in blue in the plane for the directions or . The maximum feasible magnitude of the linear and angular velocity vectors for the same combination of and obviously depends on the value of the synchronization parameter .
The example (i) represents the case where the curvature of the path is high, and the change in the end-effector orientation is much bigger than the change in position (the highest value of
). Since the example path curve is of a concave function shape, the direction of angular velocity is
, and the tips of the resultant vectors are located on the upper part of the twist manipulability polytope
(see
Figure 5a)). The set of maximum feasible linear velocity vectors form a circle; thus, the maximum directional kinematic capabilities are the same in all directions (see
Figure 5b). Since almost only angular motion is needed in this case, the maximum feasible linear velocities based on the proposed DTF method (
) are quite low. Note that in the case of the translational manipulability polytope
(reddish) or
(yellowish), the maximum linear velocity vector would end on the surface of each polytope (see
Figure 5b) since the analysis of linear velocity capabilities are evaluated separately from the rotational subspace in this case.
An example of the path segment with a convex function shape (
) is demonstrated in the case (ii). The tips of the resultant vectors are located at the bottom of the manipulability polytope (see
Figure 5c) in this case. The desired combination of linear and angular motion can be performed faster in the
direction than in the
direction if the same direction of angular velocity is considered (see
Figure 5d). The magnitude of the maximum feasible linear velocity based on the manipulability polytope
(reddish) is the same as in
Figure 5b; an even more flattened path segment is considered in this case, and different synchronization between the linear and angular velocities is needed (more linear motion).
In the example (iii), almost only translational motion is considered. The magnitudes of the linear velocity vectors are equal to the vector lengths of the translational manipulability polytope in the strong sense
(see
Figure 5e). The resultant vectors lie in the
plane since there is no rotational motion (see
Figure 5f). Although the results based on the manipulability polytope
(greenish) can give the same solution as the proposed method, the analysis of this polytope is not suitable for other cases, where synchronization between the linear and angular motion is needed.
In contrast to (iii), example (iv) represents a more flattened path segment. The magnitudes of the feasible linear velocity vectors are larger than the magnitudes of the angular velocity vectors. Especially in
Figure 5g,h, it can clearly be seen that the maximal directional kinematic capabilities are strongly dependent on the direction of the linear velocity vector
, considering that the velocity ratio factor
h and the direction of angular velocity
for all directions are the same. As it can be seen from
Figure 5g, the geometry obtained by the proposed DTF method touches the translational manipulability polytope
(reddish) only in two directions, which means that only for those directions, the same solution can be obtained based on the translational manipulability polytope in the weak sense. For all other directions, the linear velocity evaluated by
can be feasible only if suitable synchronization to rotational motion is considered, as can be seen in
Figure 5h. The angular velocity vector should not exceed the dimension of the twist manipulability polytope.
Note that
Figure 5b,d,e,g beside the weak and the strong translational polytopes show regions of feasible linear velocities under the constraint of the task-dependent velocity ratio factor
h, which are introduced as subregions within the
weak polytopes.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}