
A Vibration Fault Identification Framework for Shafting Systems of Hydropower Units: Nonlinear Modeling, Signal Processing, and Holographic Identification

Abstract
:1. Introduction
2. Nonlinear Mathematical Modeling
2.1. Multi-Vibration Sources of the Shafting
2.1.1. Rotor Stator Rubbing
2.1.2. UMP
2.1.3. Fluid Seal Excitation
2.1.4. Hydraulic Imbalance
2.1.5. Rotor Arcuate Whirled
2.1.6. Oil Film Force
2.1.7. Turbine Runner Vortex Eccentricity
2.2. Shafting System Vibration Modeling
2.3. Shafting System Vibration Nonlinear Dynamical Behavior
2.3.1. Dynamic Behavior Analysis of the Rated Condition
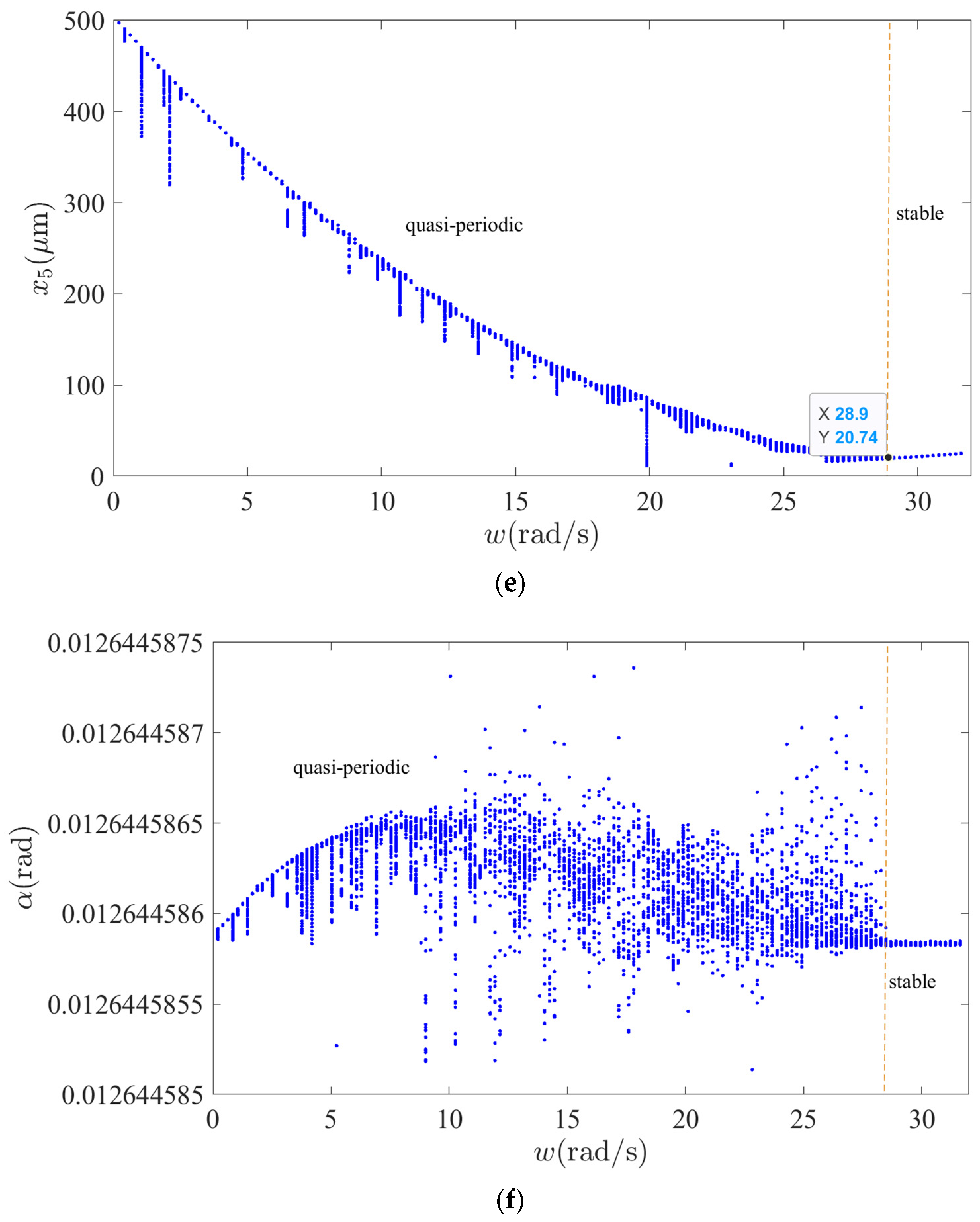
2.3.2. Nonlinear Dynamic Behavior Analysis of Shafting Vibration under Variable Speed
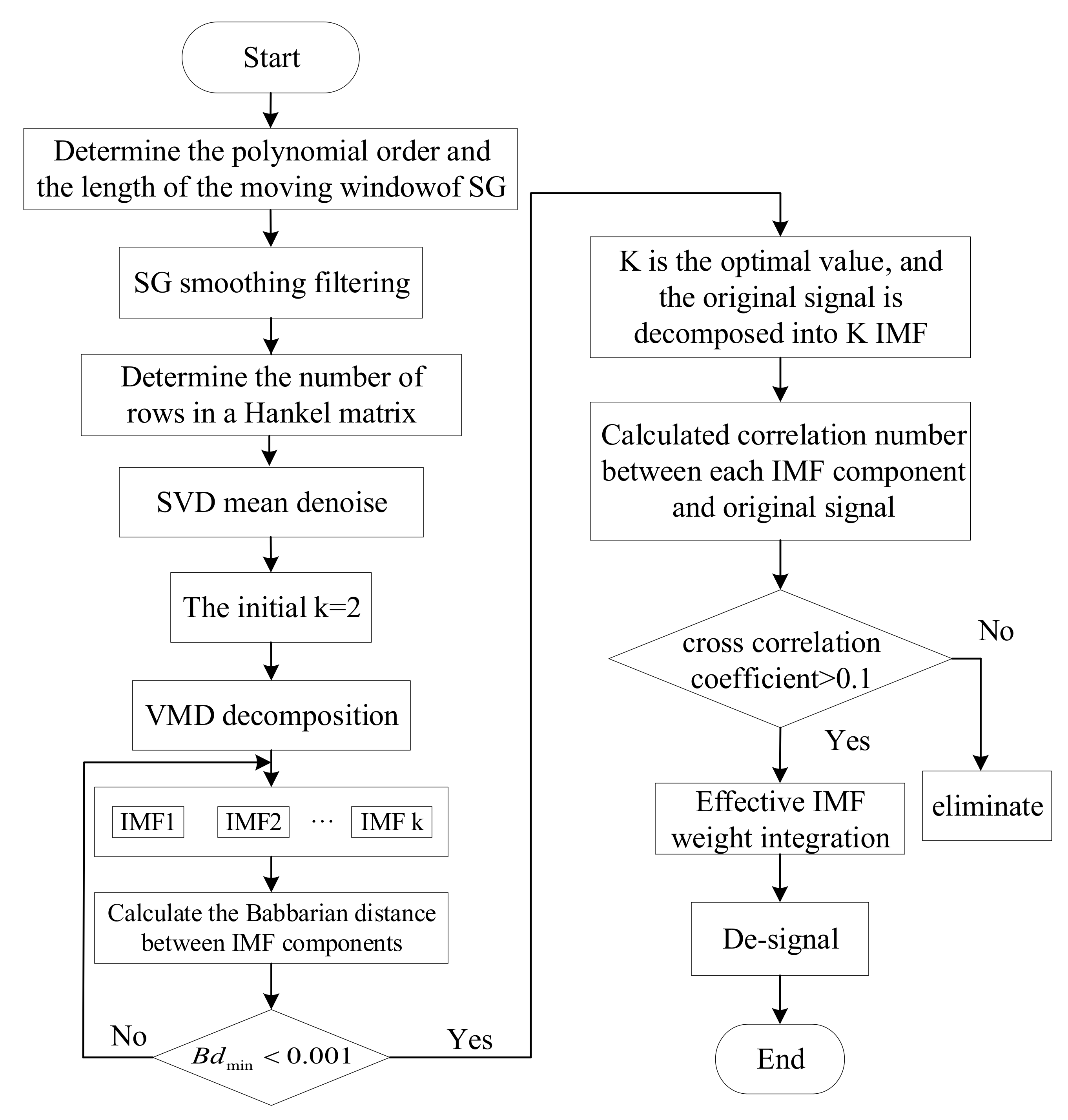
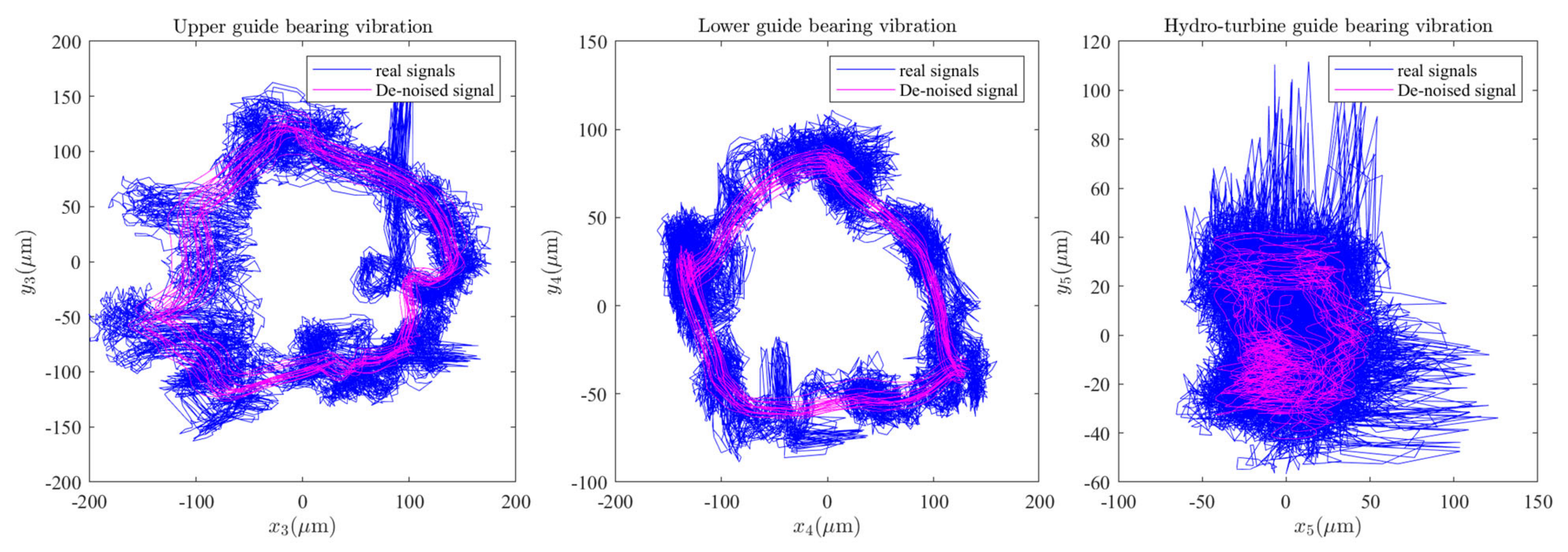
3. SG-SVD-VMD Fusion Signal Denoising
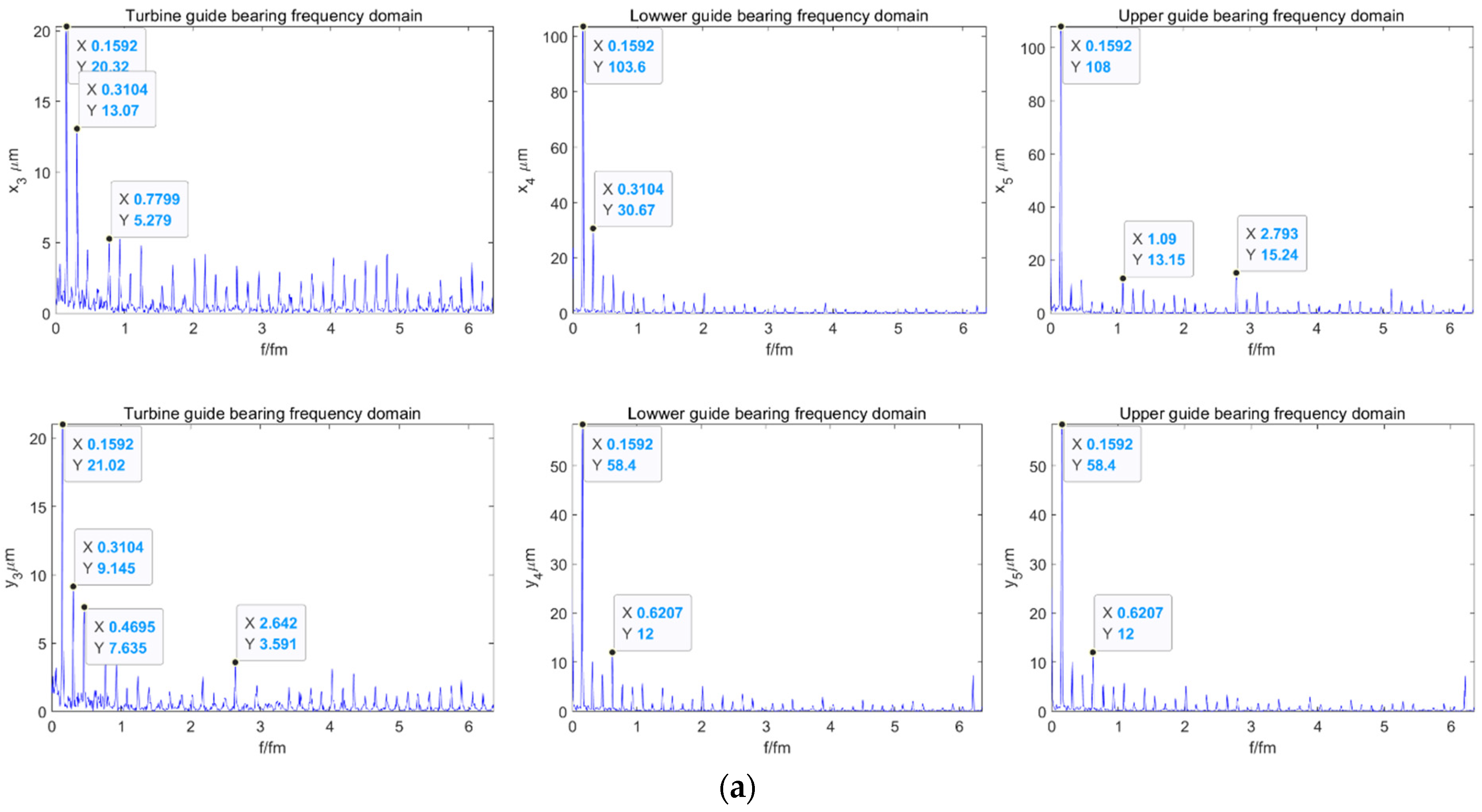
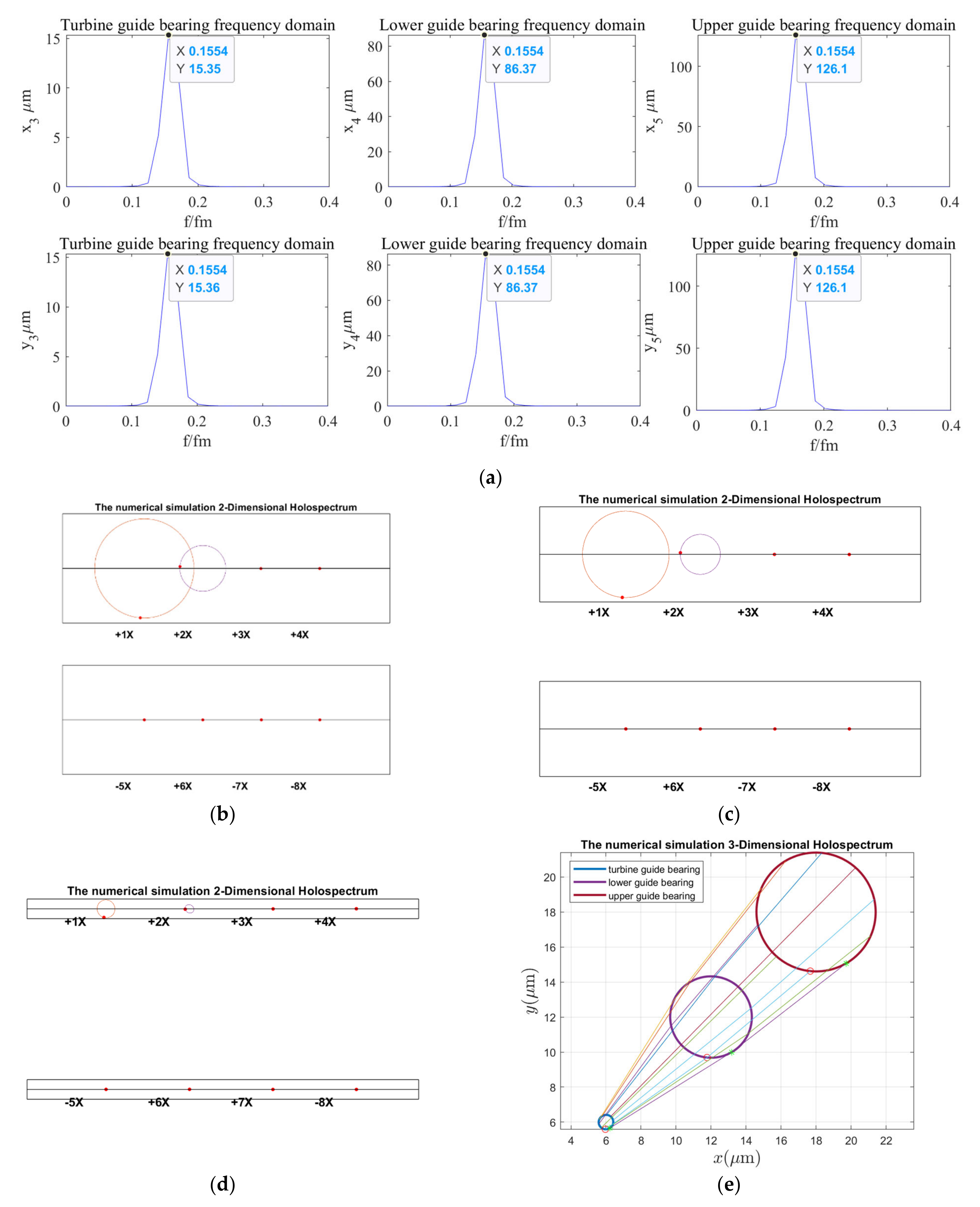
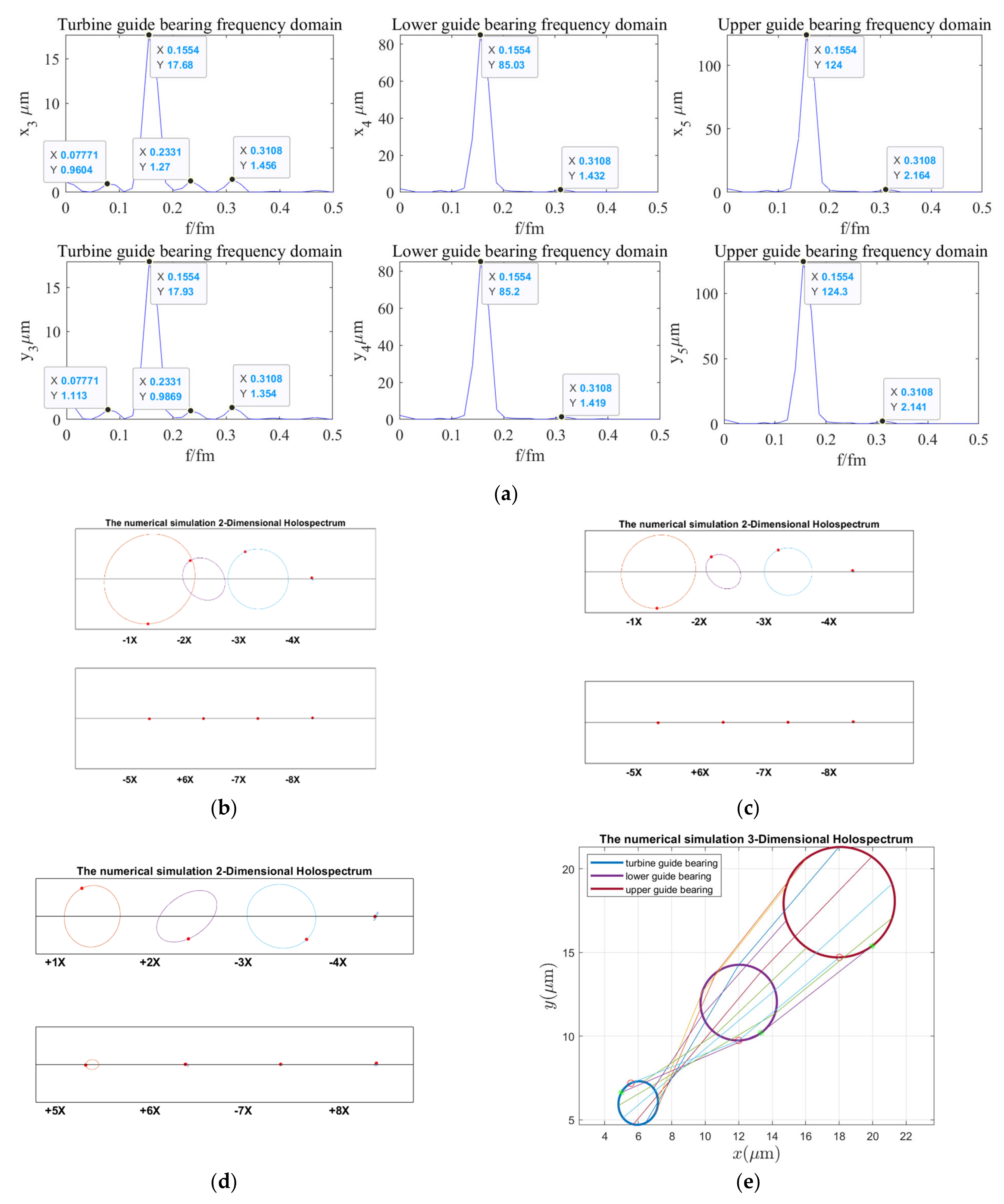
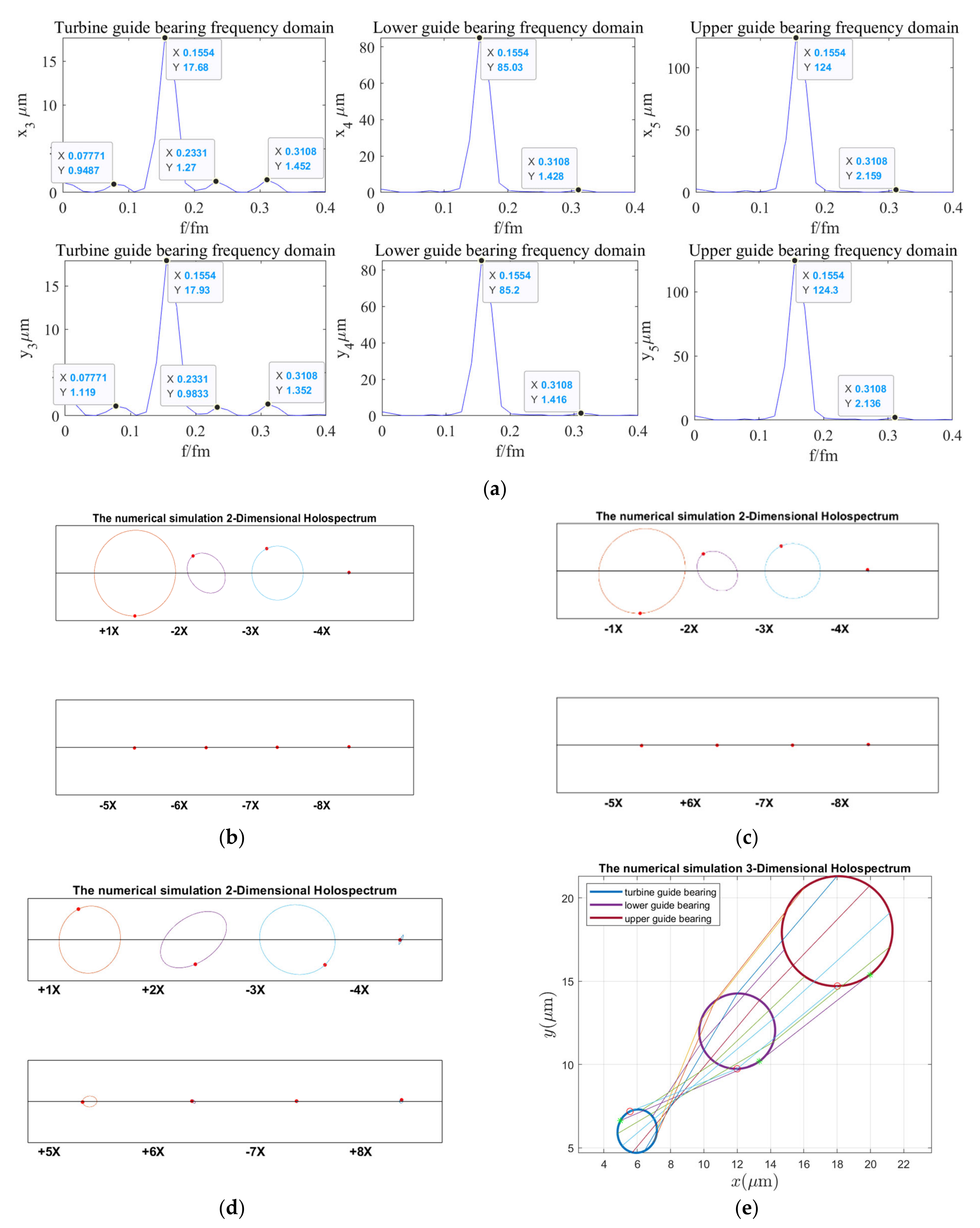
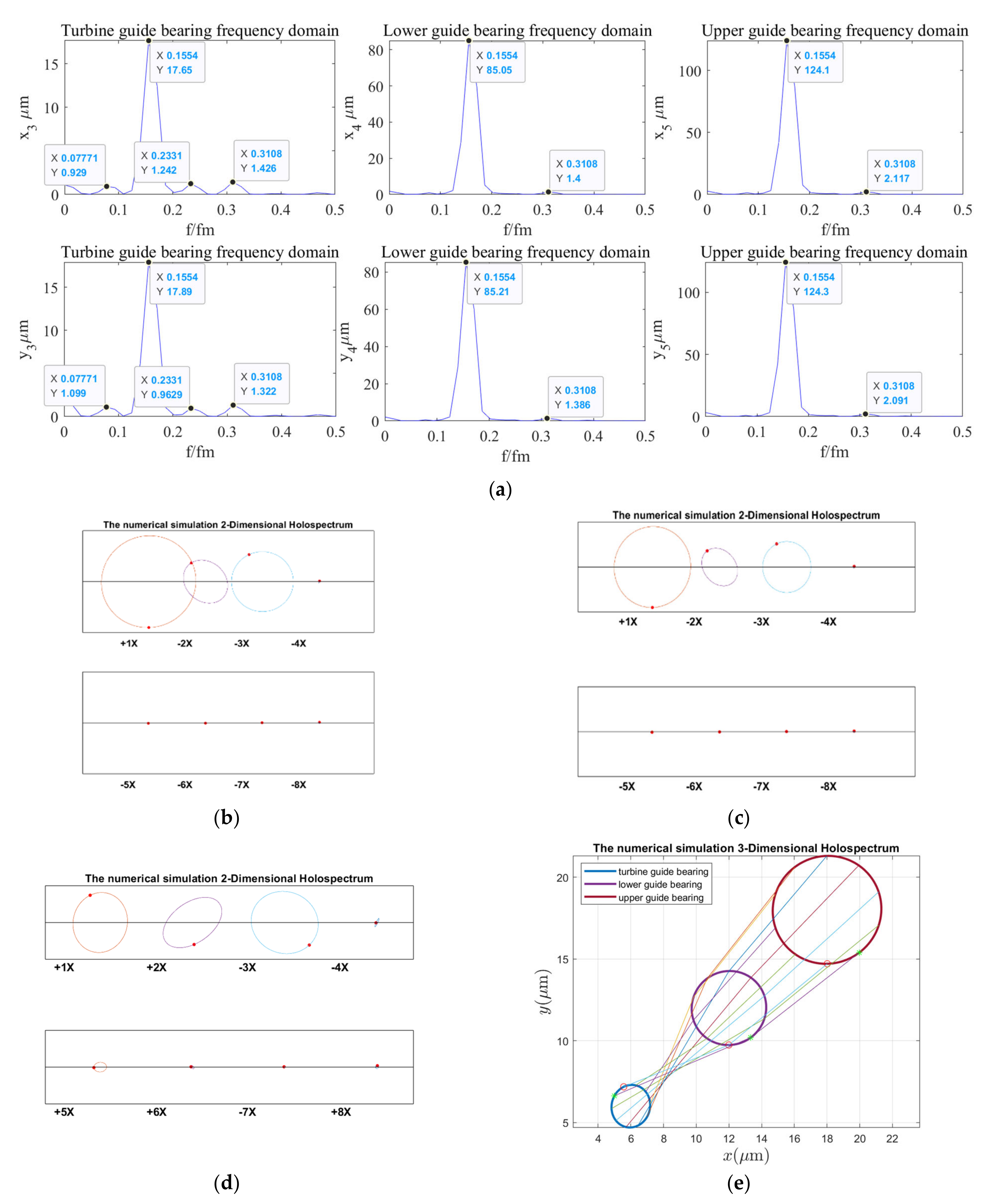
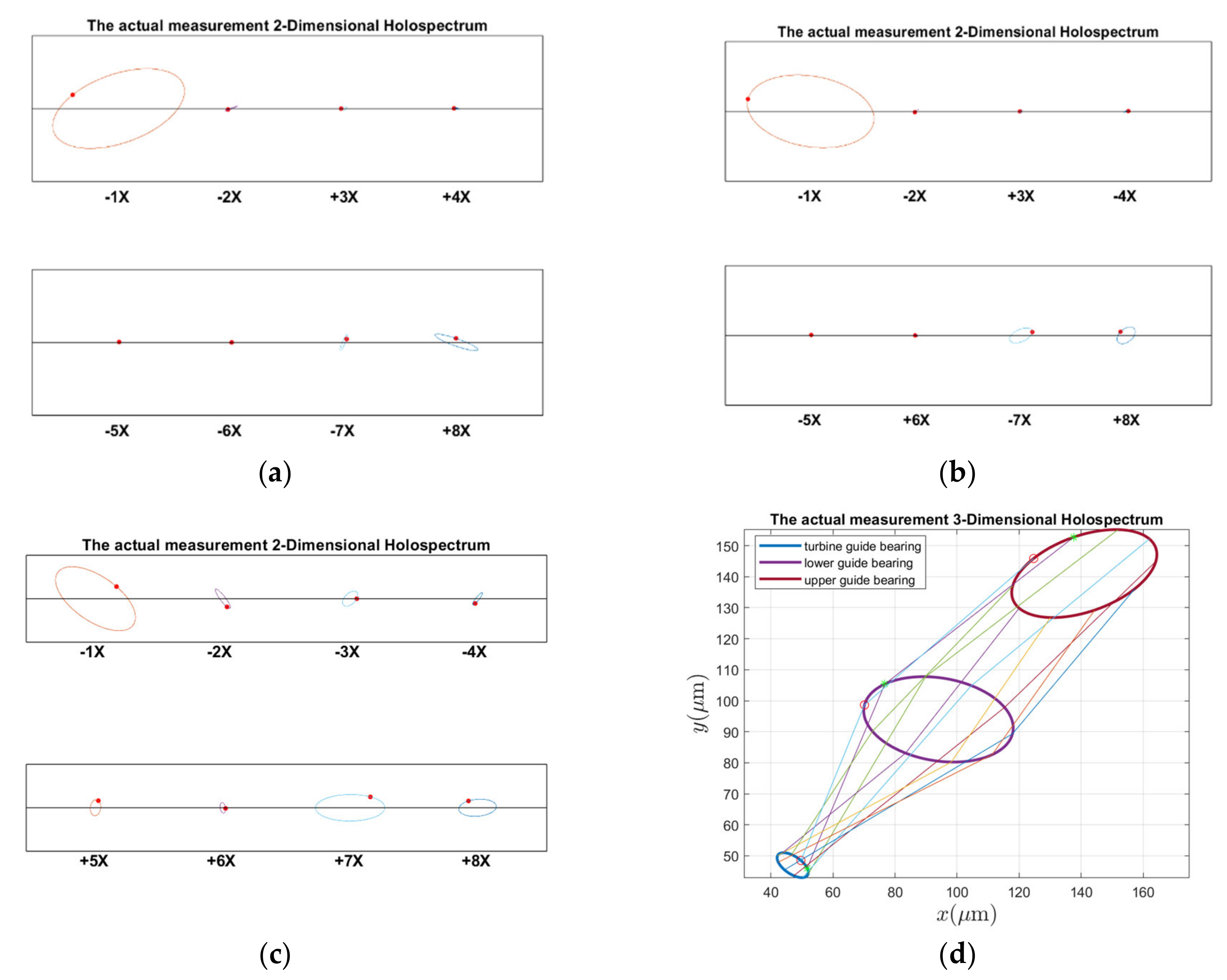
4. Holospectrum Diagnostic Technology
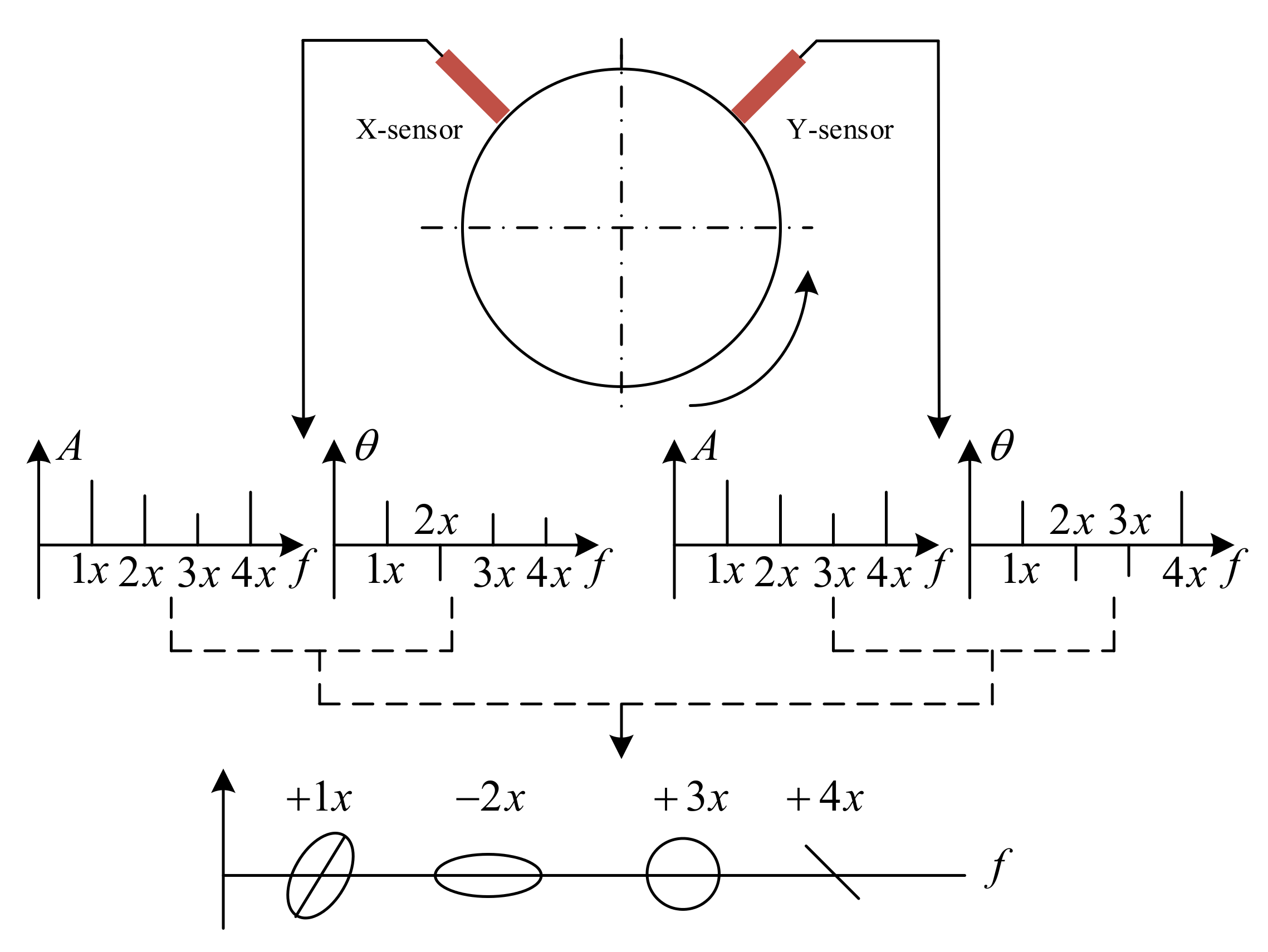
4.1. The 2D Holospectrum
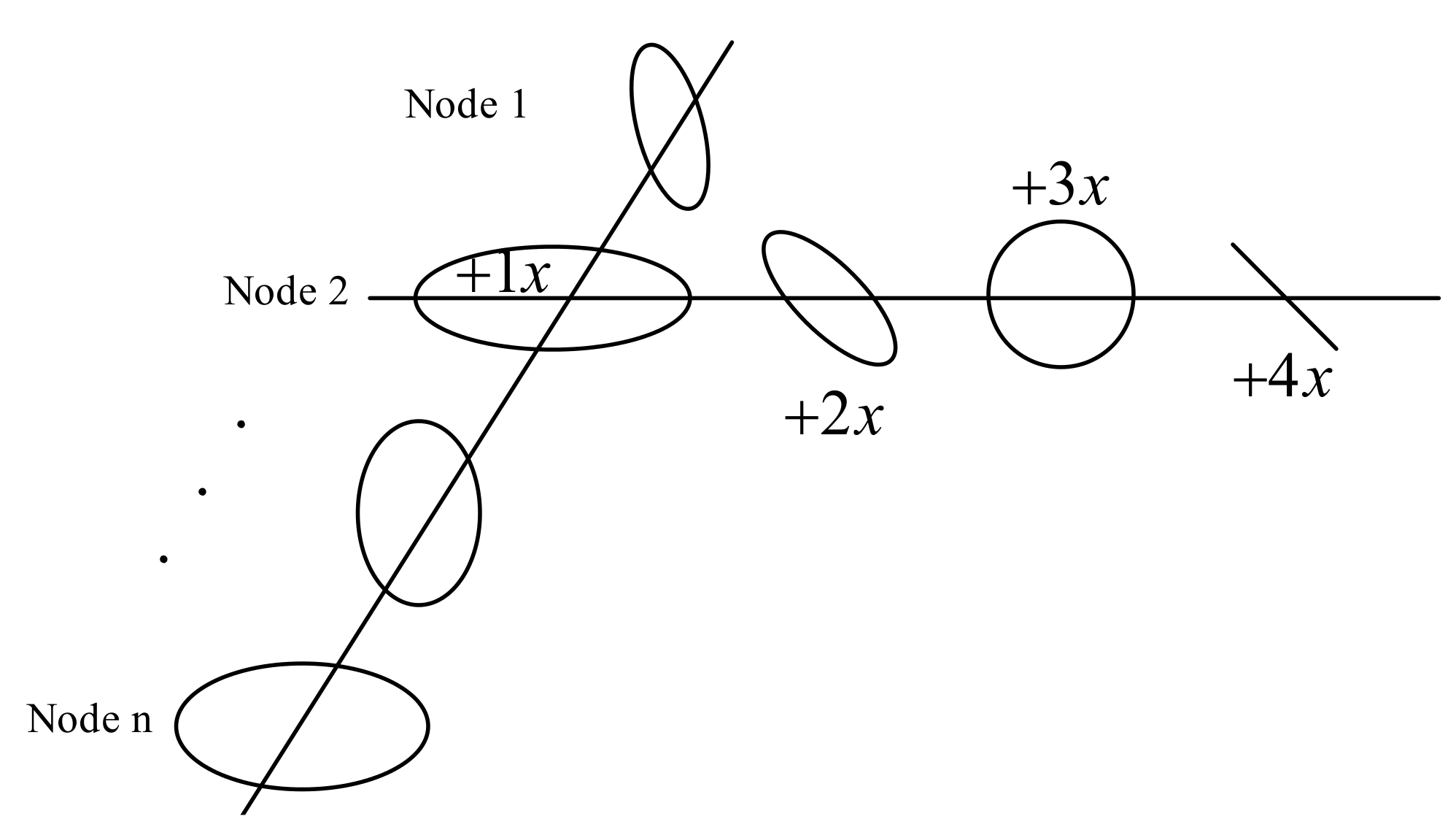
4.2. The 3D Holospectrum
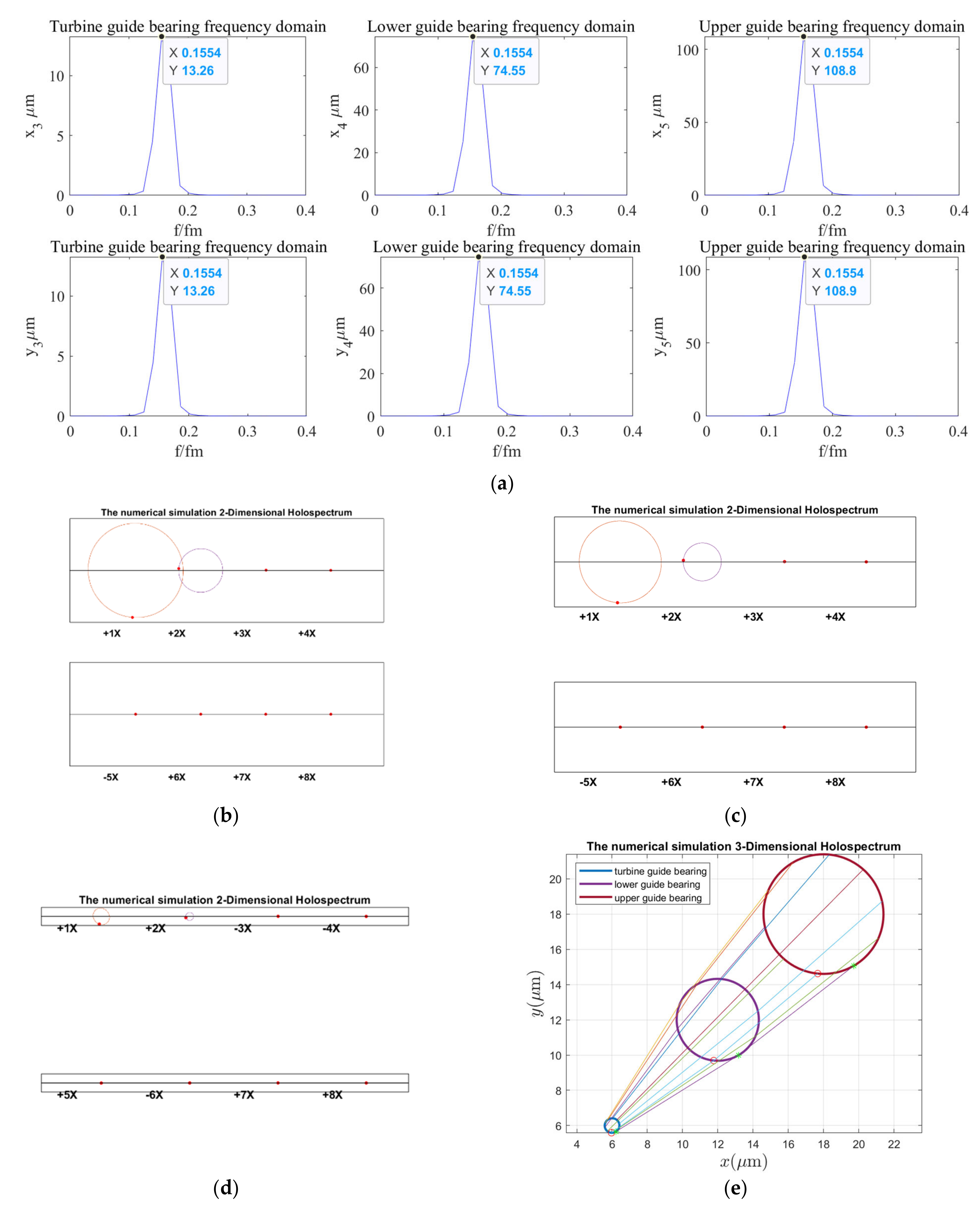
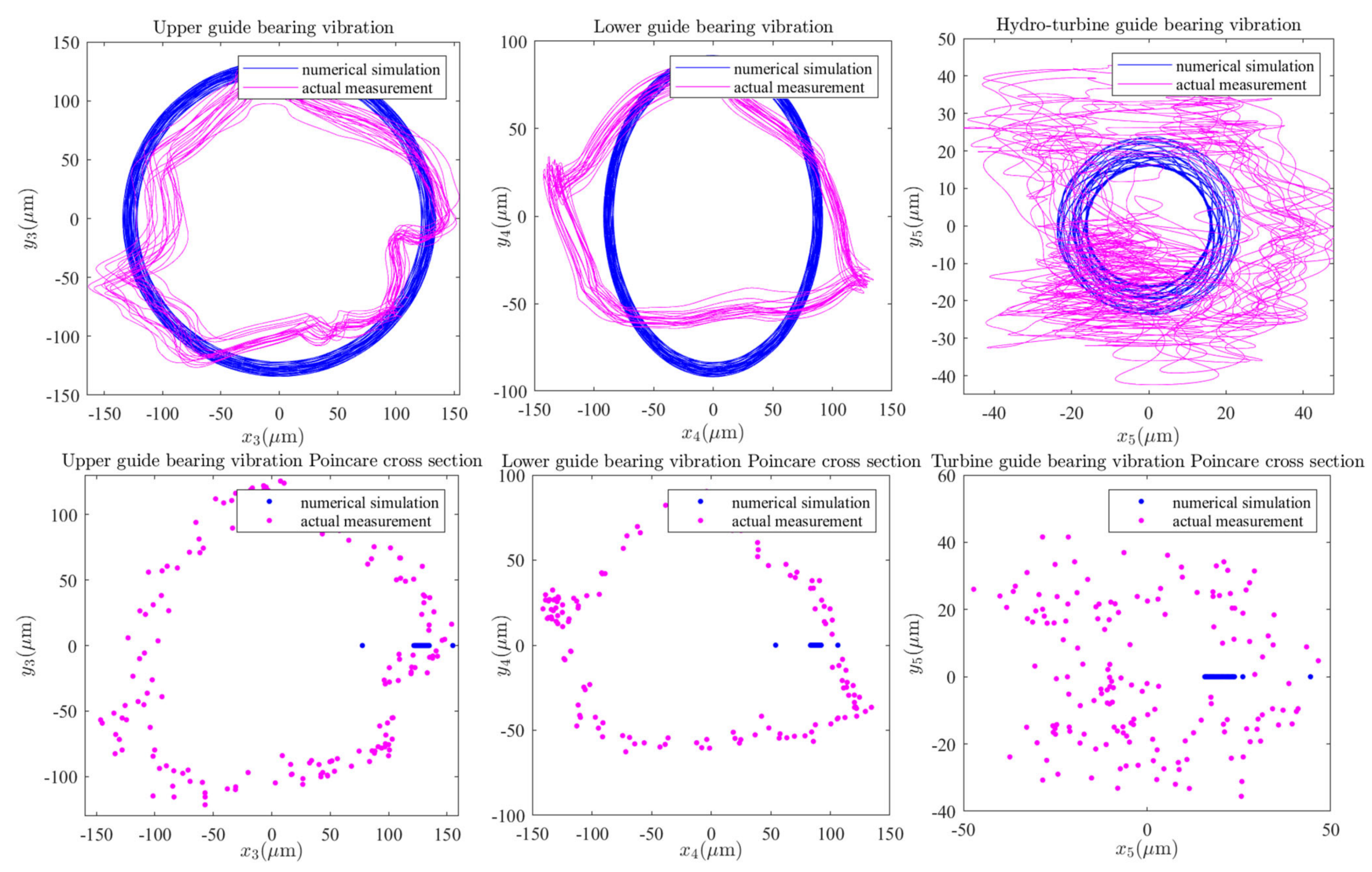
4.3. Shafting Vibration Fault Identification
5. Discussion
6. Conclusions
- (1)
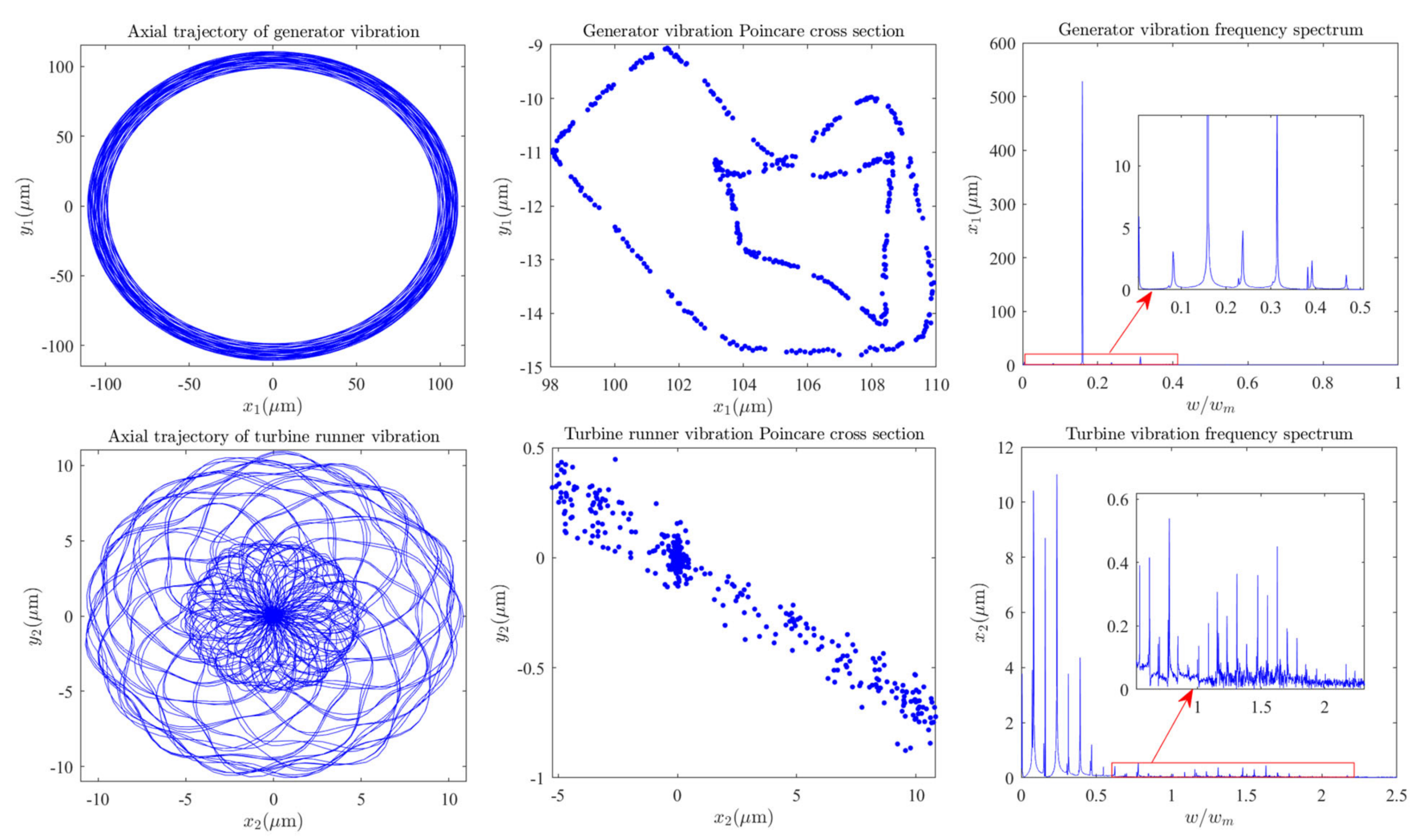
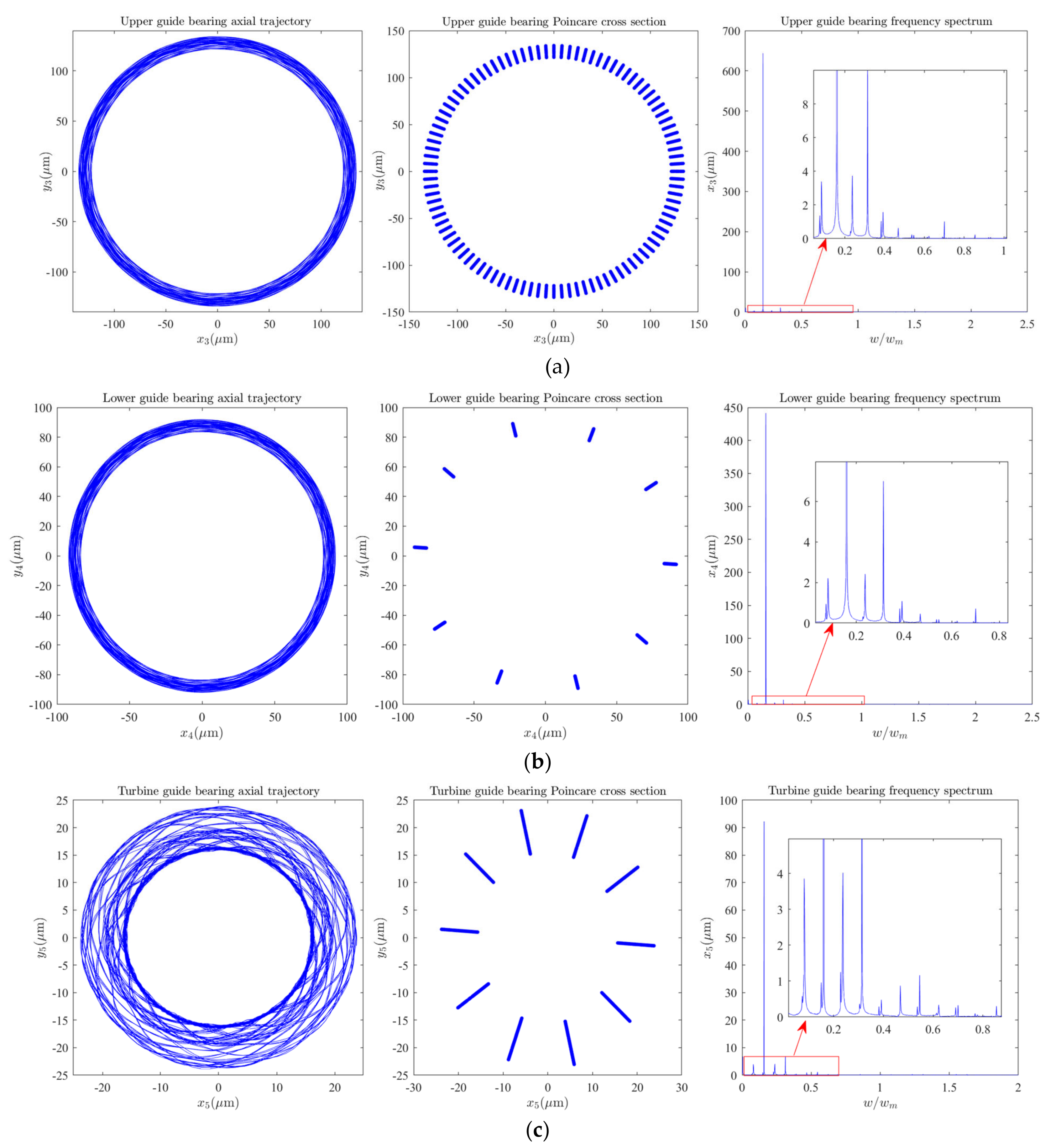
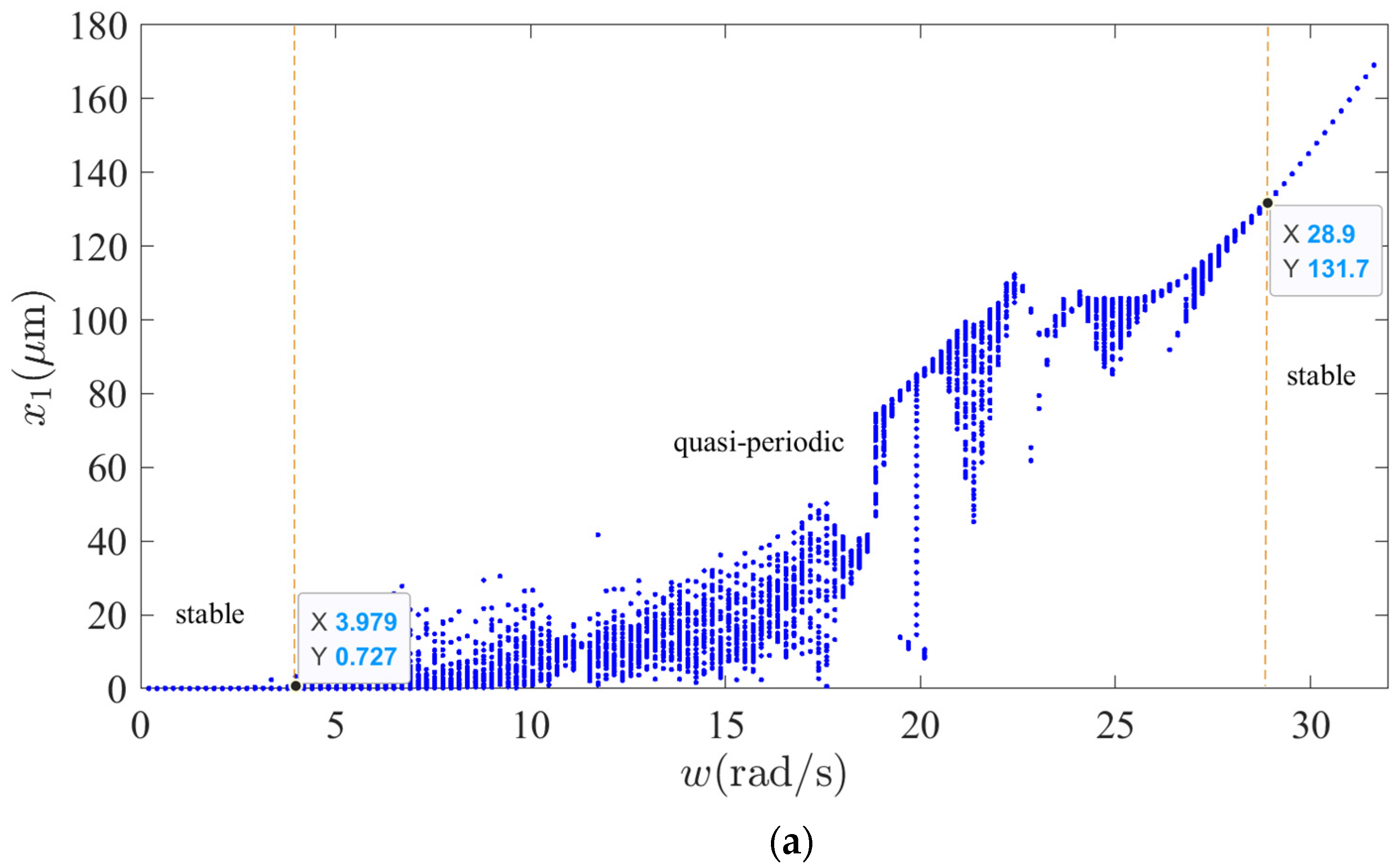
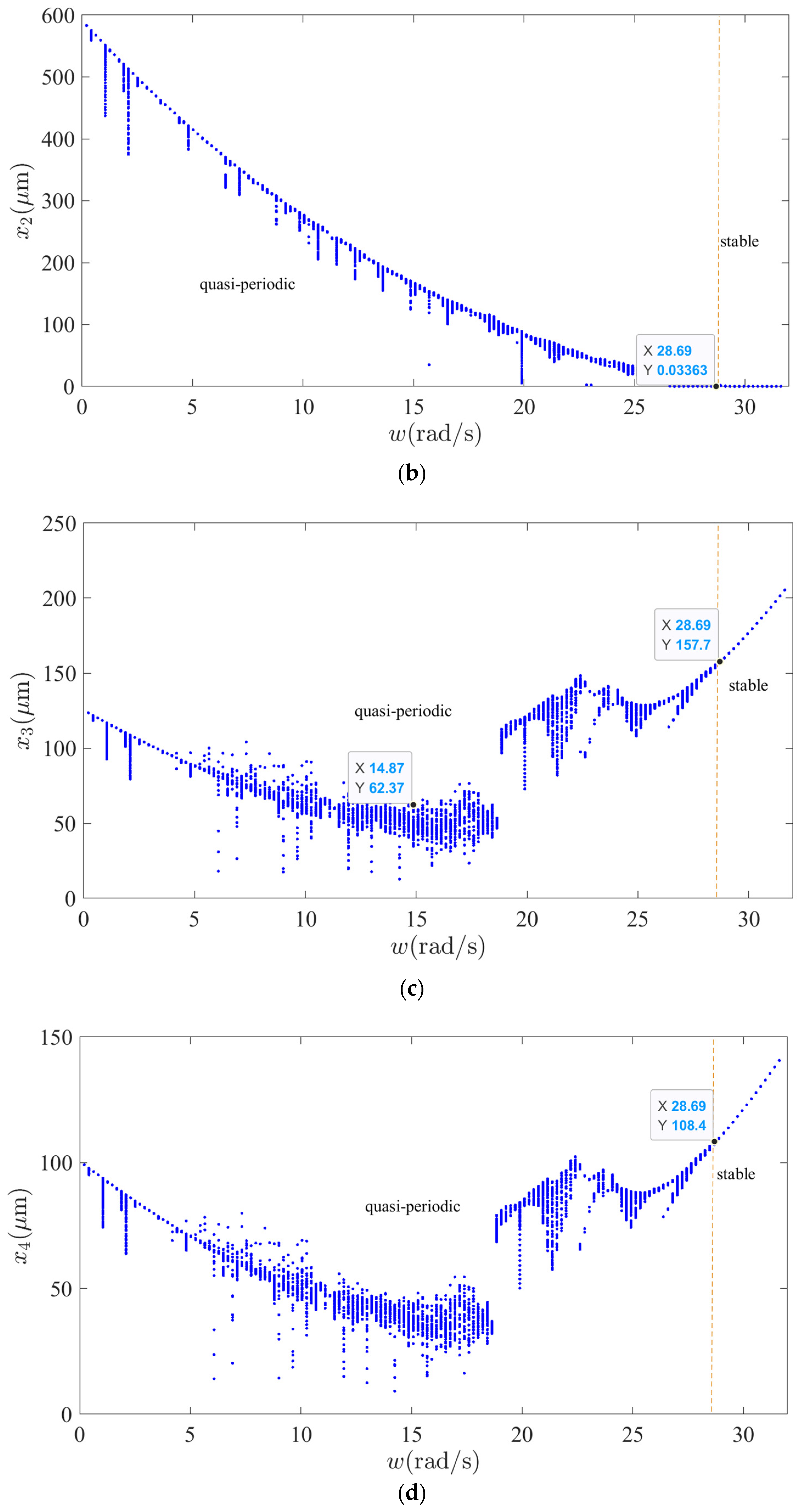
- In the low-speed region, the shafting vibrations that are excited by multiple vibration sources are complex and quasi-periodic, which show obvious vibration, strong sensitivity, and accompany some frequency components.
- (2)
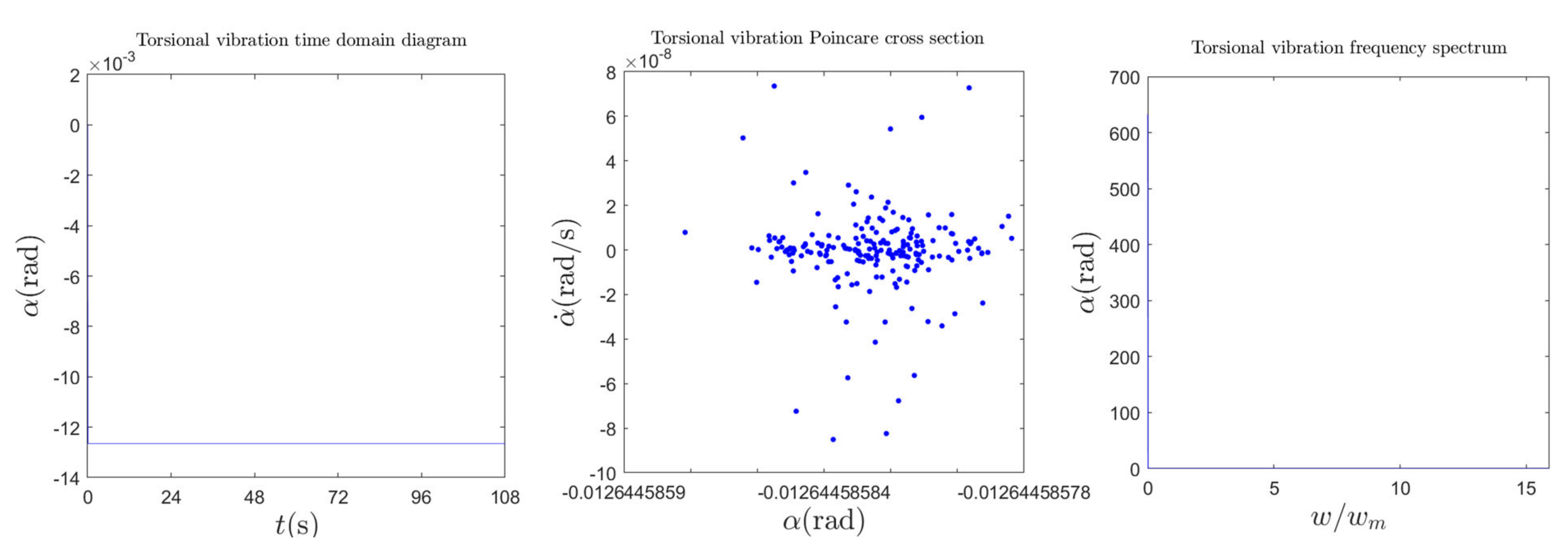
- The rotor unbalances, RAW, and turbine runner vortex eccentricity have the greatest influence on shafting vibrations. The influence of rotor imbalance and RAW are mainly reflected in the increasing vibration amplitude, and the influence of turbine runner vortex eccentricity is mainly reflected in the increasing vibration frequency components and by exciting the torque imbalance.
- (3)
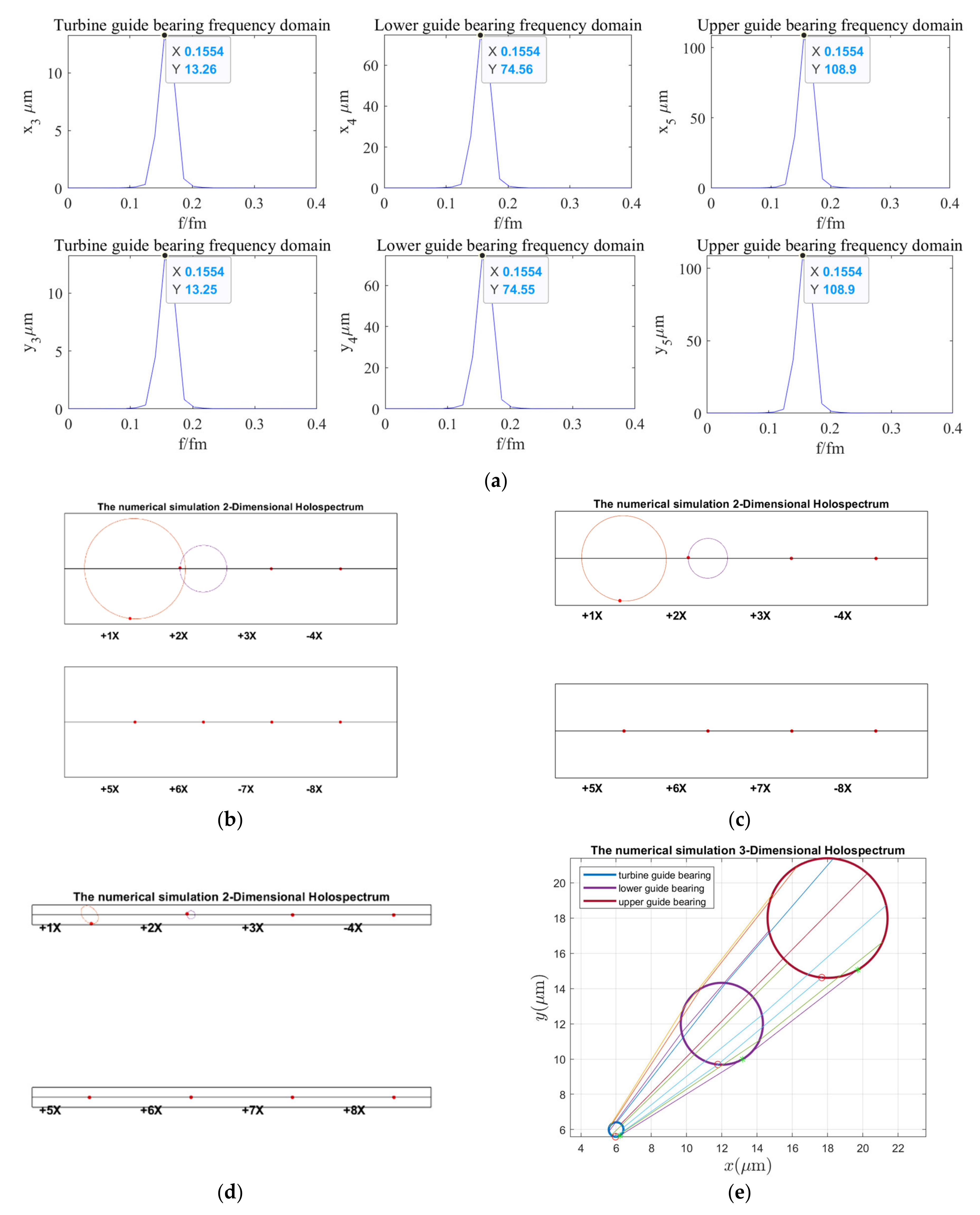
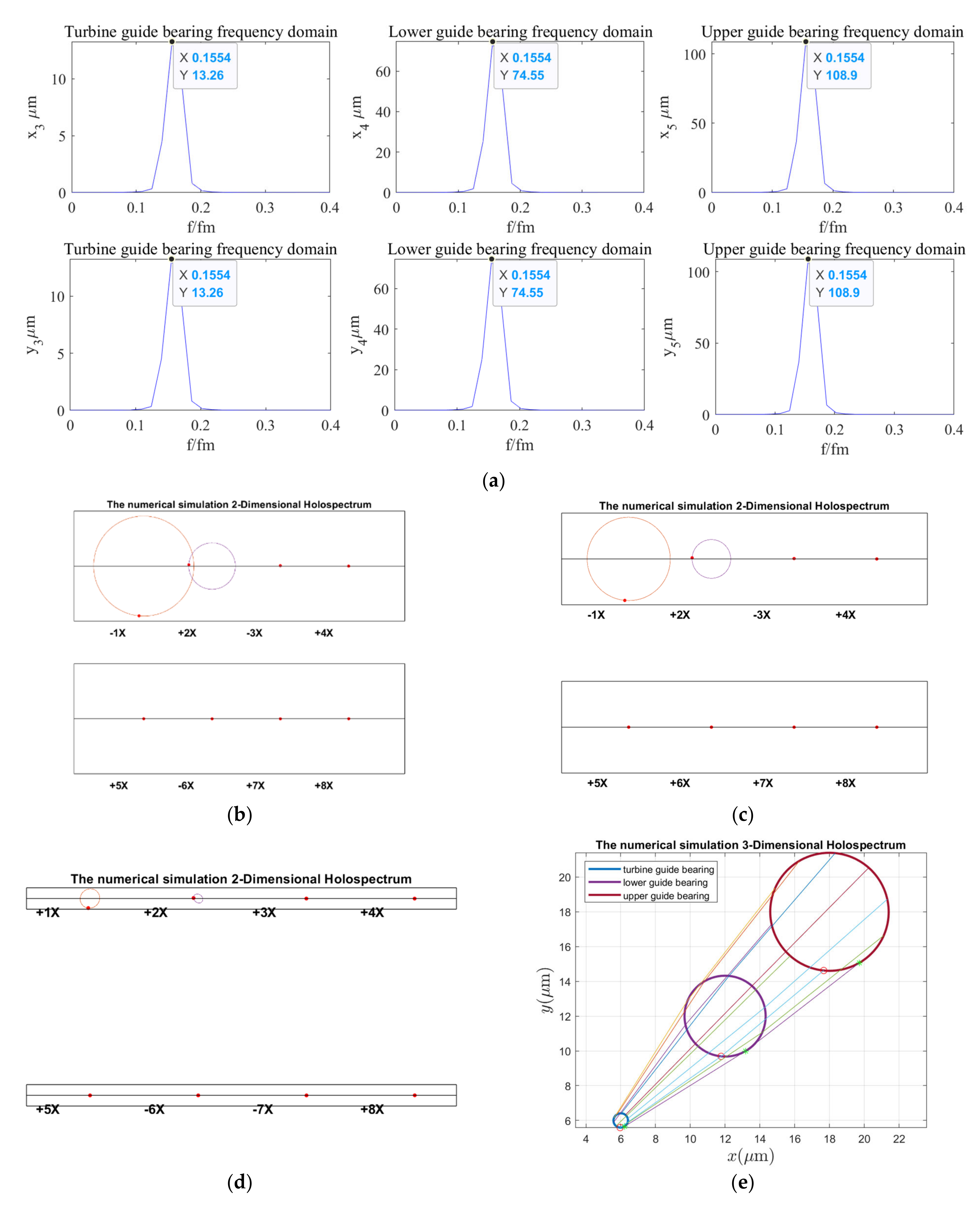
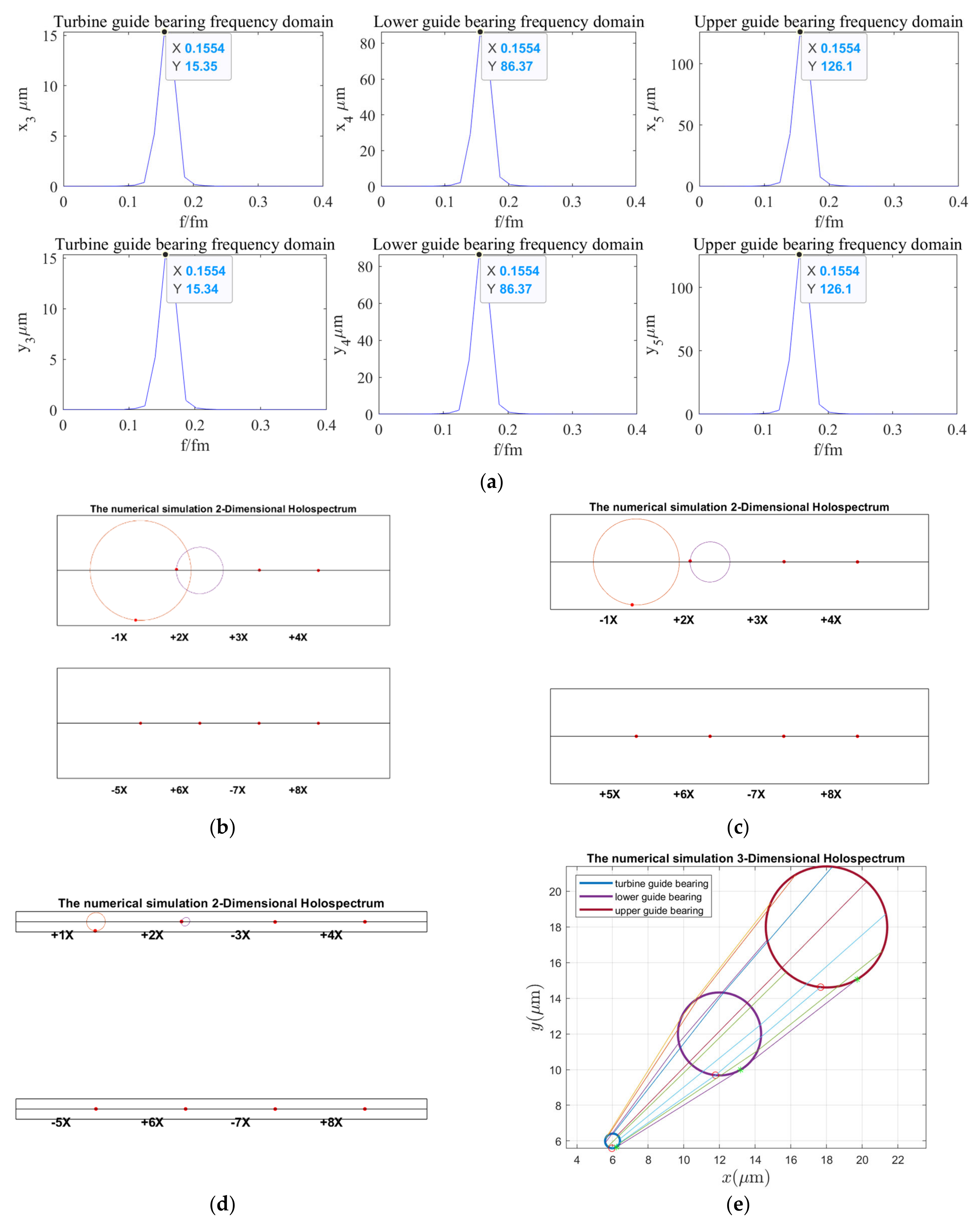
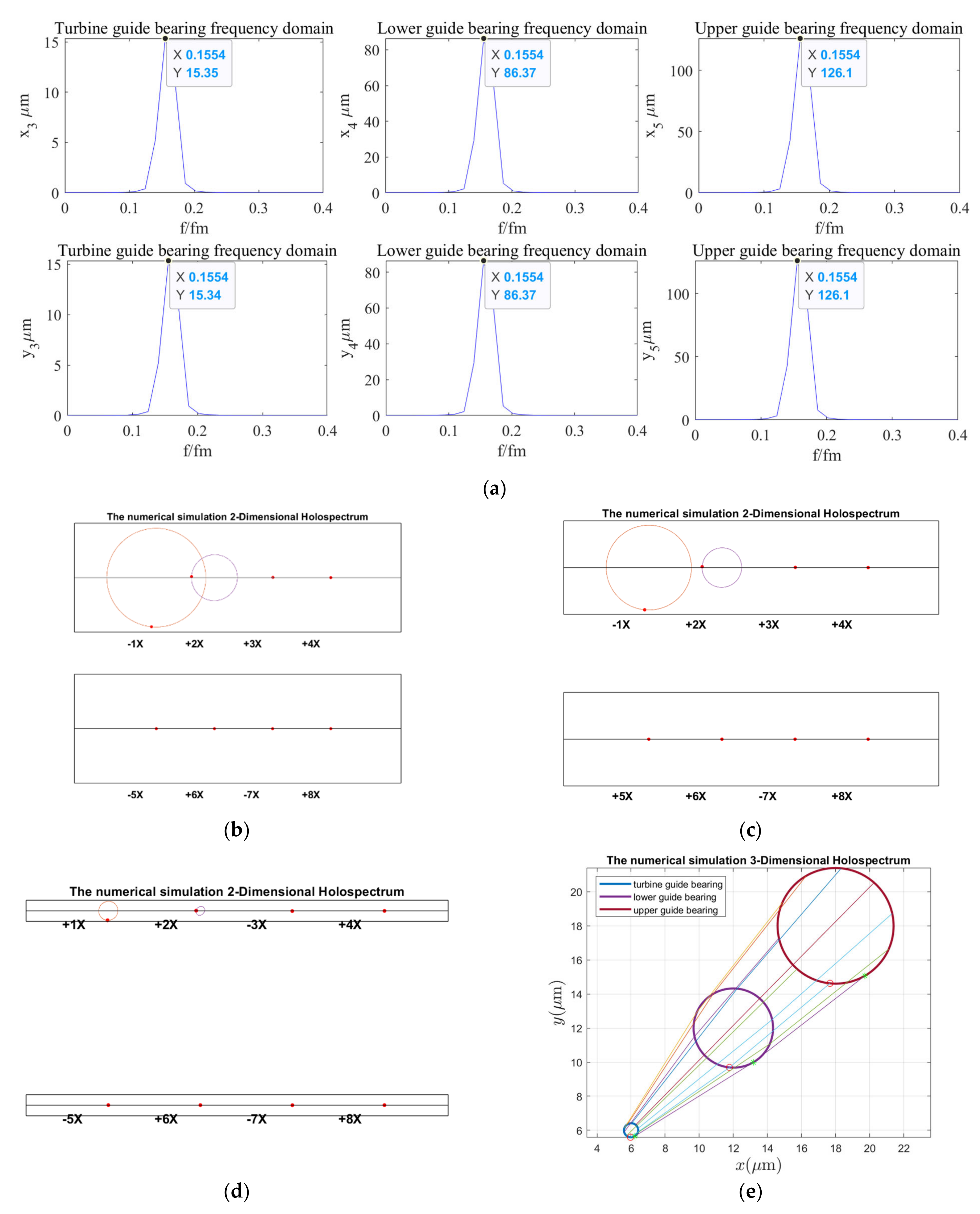
- The rotor unbalances, turbine runner vortex eccentricity, and couple unbalance vibration faults in a real operating unit were identified by comparing the measured signal holospectrum with the simulation signal holospectrum.
- (4)
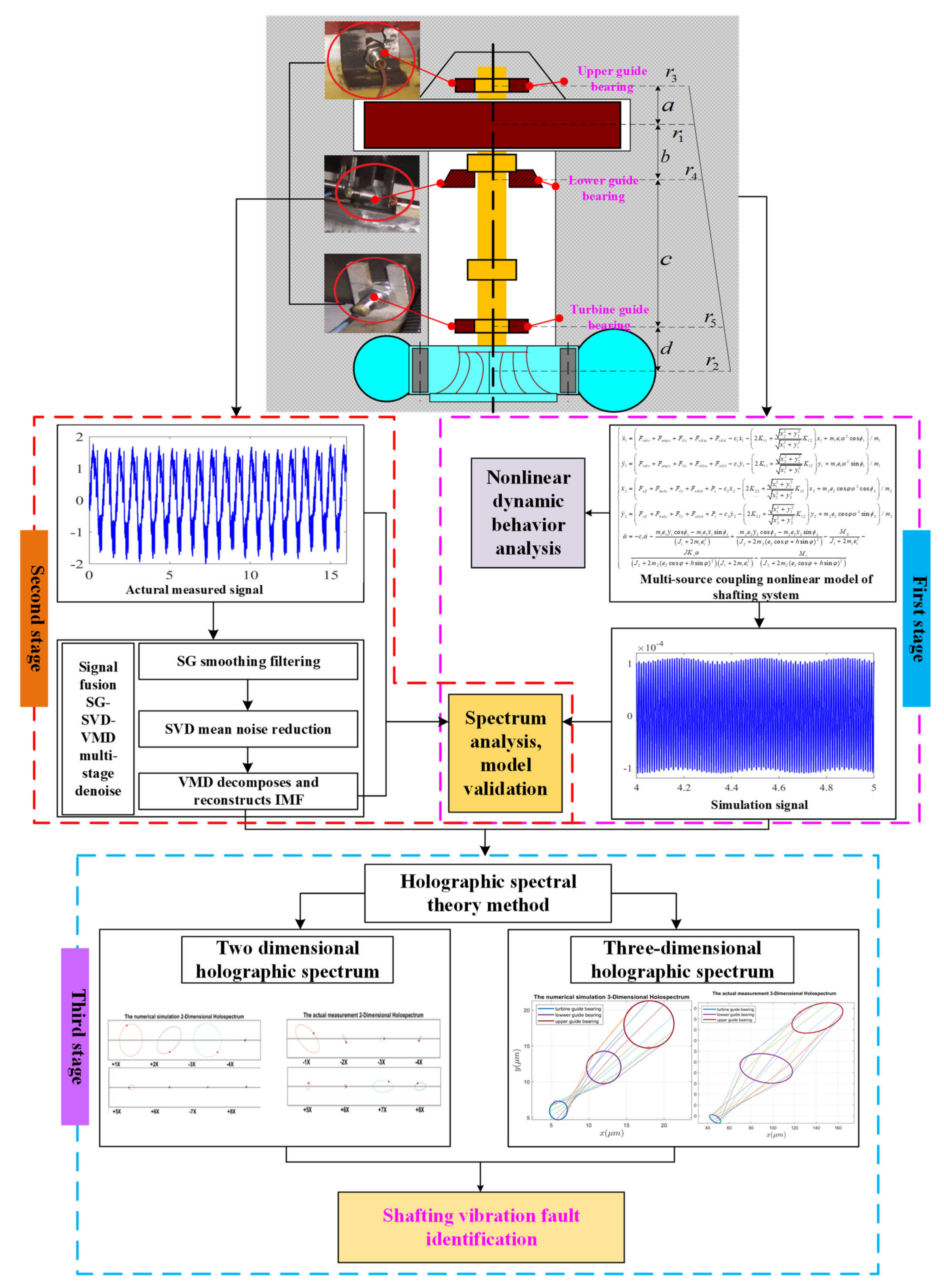
- The shafting vibration fault identification framework verified that the nonlinear mathematical model of shafting vibration is effective, and it can obtain results near that of the real dynamic behavior of shafting vibration and realize signal noise reduction. More importantly, the shafting vibration faults were quickly and effectively identified by the holospectrum, which lays a theoretical foundation for the safe and stable operation of the hydropower units.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Hu, S.; Xiang, Y.; Liu, J.; Li, J.; Liu, C. A Two-Stage Dispatching Method for Wind-Hydropower-Pumped Storage Integrated Power Systems. Front. Energy Res. 2021, 9, 65. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Y.; Hao, J.; Pan, H.; Ni, Y.; Di, J.; Ge, Z.; Chen, Q.; Guo, M. Modeling and operation optimization of an integrated ground source heat pump and solar PVT system based on heat current method. Sol. Energy 2021, 218, 492–502. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, L.; Ma, Z. A model establishment and numerical simulation of dynamic coupled hydraulic–mechanical–electric–structural system for hydropower station. Nonlinear Dyn. 2017, 87, 459–474. [Google Scholar] [CrossRef]
- Shi, Y.; Zhou, J.; Lai, X.; Xu, Y.; Guo, W.; Liu, B. Stability and sensitivity analysis of the bending-torsional coupled vibration with the arcuate whirl of hydro-turbine generator unit. Mech. Syst. Signal Process. 2021, 149, 107306. [Google Scholar] [CrossRef]
- He, X.; Zhou, X.; Yu, W.; Hou, Y.; Mechefske, C.K. Adaptive variational mode decomposition and its application to multi-fault detection using mechanical vibration signals—ScienceDirect. ISA Trans. 2020, 111, 360–375. [Google Scholar] [CrossRef]
- Kumar, P.; Tiwari, R. Finite element modelling, analysis and identification using novel trial misalignment approach in an unbalanced and misaligned flexible rotor system levitated by active magnetic bearings. Mech. Syst. Signal Processing 2020, 152, 107454. [Google Scholar] [CrossRef]
- Khorsheed, R.M.; Bekce, M.F. An integrated machine learning: Utility theory framework for real-time predictive maintenance in pumping systems. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2020, 235, 887–901. [Google Scholar] [CrossRef]
- Deenadayalan, V.; Vaishnavi, P. Improvised deep learning techniques for the reliability analysis and future power generation forecast by fault identification and remediation. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 1–9. [Google Scholar] [CrossRef]
- Li, J.; Chen, D.; Liu, G.; Gao, X.; Miao, K.; Li, Y.; Xu, B. Analysis of the gyroscopic effect on the hydro-turbine generator unit. Mech. Syst. Signal Process. 2019, 132, 138–152. [Google Scholar] [CrossRef]
- An, X.; Zhou, J.; Liu, L. Lateral Vibration Characteristics Analysis of the Hydro generator Unit, Lubricat. Seal 2008, 33, 40–44. [Google Scholar]
- Song, Z.; Liu, Y.; Guo, P.; Feng, J. Torsional Vibration Analysis of Hydro-Generator Set Considered Electromagnetic and Hydraulic Vibration Resources Coupling. Int. J. Precis. Eng. Manuf. 2018, 19, 939–945. [Google Scholar] [CrossRef]
- An, X.; Zhou, J.; Xiang, X.; Li, C.; Luo, Z. Dynamic response of a rub-impact rotor system under axial thrust. Arch. Appl. Mech. 2009, 79, 1009–1018. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, B.; Wang, Y. Incipient winding fault detection and diagnosis for squirrel-cage induction motors equipped on CRH trains. ISA Trans. 2019, 99, 488–495. [Google Scholar] [CrossRef] [PubMed]
- Xu, B.; Chen, D.; Zhang, H.; Li, C.; Zhou, J. Shaft mis-alignment induced vibration of a hydraulic turbine generating system considering parametric uncertainties. J. Sound Vib. 2018, 435, 74–90. [Google Scholar] [CrossRef]
- Zhuang, K.; Gao, C.; Li, Z.; Yan, D.; Fu, X. Dynamic Analyses of the Hydro-Turbine Generator Shafting System Considering the Hydraulic Instability. Energies 2018, 11, 2862. [Google Scholar] [CrossRef] [Green Version]
- Childs, D.W. Dynamic Analysis of Turbulent Annular Seals Based On Hirs’ Lubrication Equation. J. Lubr. Technol. 1982, 105, 429–436. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, X.; Huang, H.; Xiang, J. A hybrid of FEM simulations and generative adversarial networks to classify faults in rotor-bearing systems. ISA Trans. 2020, 108, 356–366. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, Q.; Ma, Z.; Wang, X. Transient vibration analysis of unit-plant structure for hydropower station in sudden load increasing process. Mech. Syst. Signal Process. 2019, 120, 486–504. [Google Scholar] [CrossRef]
- Jia, Y.; Li, G.; Dong, X.; He, K. A novel denoising method for vibration signal of hob spindle based on EEMD and grey theory. Measurement 2021, 169, 108490. [Google Scholar] [CrossRef]
- Das, I.; Arif, M.T.; Oo, A.M.T.; Subhani, M. An Improved Hilbert-Huang Transform for Vibration-Based Damage Detection of Utility Timber Poles. Appl. Sci. 2021, 11, 2974. [Google Scholar] [CrossRef]
- Zhao, Y.; Shan, R.L.; Wang, H.L. Research on vibration effect of tunnel blasting based on an improved Hilbert–Huang transform. Environ. Earth Sci. 2021, 80, 206. [Google Scholar] [CrossRef]
- Zhong, J.; Bi, X.; Shu, Q.; Chen, M.; Zhou, D.; Zhang, D. Partial Discharge Signal Denoising Based on Singular Value Decomposition and Empirical Wavelet Transform. IEEE Trans. Instrum. Meas. 2020, 69, 8866–8873. [Google Scholar] [CrossRef]
- Shao, Y.; Du, S.; Tang, H. An extended bi-dimensional empirical wavelet transform based filtering approach for engineering surface separation using high definition metrology. Measurement 2021, 178, 109259. [Google Scholar] [CrossRef]
- Li, J.; Yao, X.; Wang, H.; Zhang, J. Periodic impulses extraction based on improved adaptive VMD and sparse code shrinkage denoising and its application in rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2019, 126, 568–589. [Google Scholar] [CrossRef]
- Zhu, W.; Zhou, J.; Xia, X.; Li, C.; Xiao, J.; Xiao, H.; Zhang, X. A novel KICA–PCA fault detection model for condition process of hydroelectric generating unit. Measurement 2014, 58, 197–206. [Google Scholar] [CrossRef]
- Zhang, Y.; Lian, Z.; Fu, W.; Chen, X. An ESR Quasi-Online Identification Method for the Fractional-Order Capacitor of Forward Converters Based on Variational Mode Decomposition. IEEE Trans. Power Electron. 2021, 37, 3685–3690. [Google Scholar] [CrossRef]
- Tochev, E.; Rengasamy, D.; Pfifer, H.; Ratchev, S. System condition monitoring through Bayesian change point detection using pump vibrations. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 667–672. [Google Scholar]
- Selak, L.; Butala, P.; Sluga, A. Condition monitoring and fault diagnostics for hydropower plants. Comput. Ind. 2014, 65, 924–936. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, M.; Li, Y.; Xu, Z.; Wang, J.; Fang, X. A Multi-Input and Multi-Task Convolutional Neural Network for Fault Diagnosis based on Bearing Vibration Signal. IEEE Sens. J. 2021, 21, 10946–10956. [Google Scholar] [CrossRef]
- Qin, N.; Liang, K.; Huang, D.; Ma, L.; Kemp, A.H. Multiple Convolutional Recurrent Neural Networks for Fault Identification and Performance Degradation Evaluation of High-Speed Train Bogie. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5363–5376. [Google Scholar] [CrossRef]
- Xu, B.; Yan, D.; Chen, D.; Gao, X.; Wu, C. Sensitivity analysis of a Pelton hydropower station based on a novel approach of turbine torque. Energy Convers. Manag. 2017, 148, 785–800. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, L.; Guo, Y.; Qian, J.; Zhang, C. The generalized Hamiltonian model for the shafting transient analysis of the hydro turbine generating sets. Nonlinear Dyn. 2014, 76, 1921–1933. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Zhou, J. Stability and sensitivity analyses and multi-objective optimization control of the hydro-turbine generator unit. Nonlinear Dyn. 2022, 107, 2245–2273. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Lu, Q. Applying segmentation and classification to improve performance of smoothing. Digit. Signal Process. 2021, 109, 102913. [Google Scholar] [CrossRef]
- Shi, Y.; Zhou, J. Multistage noise reduction processing for vibration signal of hydropower units. J. Phys. Conf. Ser. 2021, 2108, 012008. [Google Scholar] [CrossRef]
- Qu, L.; Liu, X.; Peyronne, G.; Chen, Y. The Holospectrum: A new method for rotor surveillance and diagnosis. Mech. Syst. Signal Process. 1989, 3, 255–267. [Google Scholar] [CrossRef]
- Ming, T.F.; Zhang, X.H. 2Dimensional Holospectrum Based Fault Detection of Rotor. Adv. Mater. Res. 2012, 346, 797–803. [Google Scholar] [CrossRef]
- Qiu, H. A Genetic Algorithm Based Balancing Framework for Flexible Rotors. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 12–16 September 1999; Volume 19777, pp. 1161–1167. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 565,432 | kg | 2.54 | m | ||
| 11,700 | kg | 2.04 | m | ||
| N·s/m | 8.19 | m | |||
| N·s/m | 1.765 | m | |||
| 1000 | N·s/rad | 0.0005 | m | ||
| N/m | 0.0005 | m | |||
| N/m | 1.15 | m | |||
| N/m | 0.3 | m | |||
| kg·m2 | 7.44 | m | |||
| kg·m2 | 2.927 | m | |||
| Pa | 7.44 | m | |||
| 176.1 | m3/s | 0.0021 | m | ||
| 0.12 | 0.0035 | m | |||
| 6,100,000 | N/m | 10.3 | m | ||
| 9.81 | m/s−2 | 6.045 | m | ||
| 0.11 | 0.994 | m | |||
| 0.6 | 250 | r/min | |||
| Pa | 306 | MW | |||
| 0.8 | 16.1 | ° | |||
| 2703 | cm | 14.2 | ° | ||
| −0.25 | 0.23 | ||||
| 3.5 | 5.34 | m | |||
| 0.0657 | 1 | T | |||
| 1.86 | m | 0.5 | |||
| 2.67 | m | 0.066 |
| Methods | Index | X3 | Y3 | X4 | Y4 | X5 | Y5 |
|---|---|---|---|---|---|---|---|
| VMD | SNR | 17.6353 | 16.0648 | 19.7347 | 16.3642 | 5.9473 | 4.8077 |
| RMSE | 0.0818 | 0.0810 | 0.0570 | 0.0863 | 0.1828 | 0.2108 | |
| SG-VMD | SNR | 16.0114 | 14.1497 | 15.2229 | 14.1068 | 5.5645 | 4.8988 |
| RMSE | 0.0987 | 0.1010 | 0.0956 | 0.1118 | 0.1911 | 0.2086 | |
| SVD-VMD | SNR | 17.5892 | 16.0299 | 16.8659 | 16.3438 | 8.5060 | 4.8702 |
| RMSE | 0.0823 | 0.0813 | 0.0791 | 0.0864 | 0.1362 | 0.2093 | |
| SVD-SG-VMD | SNR | 16.0286 | 13.7879 | 13.2089 | 14.0245 | 5.5583 | 4.9030 |
| RMSE | 0.0985 | 0.1053 | 0.1205 | 0.1129 | 0.1912 | 0.2087 | |
| VMD-SG | SNR | 17.6333 | 16.0305 | 19.7115 | 16.3774 | 5.8921 | 4.7716 |
| RMSE | 0.0819 | 0.0813 | 0.0571 | 0.0861 | 0.1840 | 0.2117 | |
| VMD-SVD | SNR | 17.5842 | 16.0022 | 19.6979 | 16.3266 | 5.8383 | 4.7849 |
| RMSE | 0.0823 | 0.0816 | 0.0572 | 0.0866 | 0.1851 | 0. 2114 | |
| VMD-SVD-SG | SNR | 17.6131 | 15.9934 | 19.7435 | 16.3497 | 5.8492 | 4.7694 |
| RMSE | 0.0821 | 0.0817 | 0.0569 | 0.0864 | 0.1849 | 0.2118 | |
| VMD-SG-SVD | SNR | 17.5872 | 15.9790 | 19.6888 | 16.3201 | 5.8118 | 4.7769 |
| RMSE | 0.0823 | 0.0818 | 0.0572 | 0.0867 | 0.1857 | 0.2116 | |
| SG-SVD-VMD | SNR | 18.7629 | 16.7913 | 19.7437 | 16.3663 | 6.2178 | 4.9064 |
| RMSE | 0.0719 | 0.0745 | 0.0568 | 0.0862 | 0.1772 | 0.2085 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Zhou, J.; Huang, J.; Xu, Y.; Liu, B. A Vibration Fault Identification Framework for Shafting Systems of Hydropower Units: Nonlinear Modeling, Signal Processing, and Holographic Identification. Sensors 2022, 22, 4266. https://doi.org/10.3390/s22114266
Shi Y, Zhou J, Huang J, Xu Y, Liu B. A Vibration Fault Identification Framework for Shafting Systems of Hydropower Units: Nonlinear Modeling, Signal Processing, and Holographic Identification. Sensors. 2022; 22(11):4266. https://doi.org/10.3390/s22114266
Chicago/Turabian StyleShi, Yousong, Jianzhong Zhou, Jie Huang, Yanhe Xu, and Baonan Liu. 2022. "A Vibration Fault Identification Framework for Shafting Systems of Hydropower Units: Nonlinear Modeling, Signal Processing, and Holographic Identification" Sensors 22, no. 11: 4266. https://doi.org/10.3390/s22114266