
Agrobot Lala—An Autonomous Robotic System for Real-Time, In-Field Soil Sampling, and Analysis of Nitrates

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
- Cloud-based application for task management and generation of sample points on the plot based on a proprietary AI algorithm.
- Smartphone application for monitoring and customization of the task.
- Robotic system for acquiring and analysis of soil samples.
2.1. Cloud-Based Application
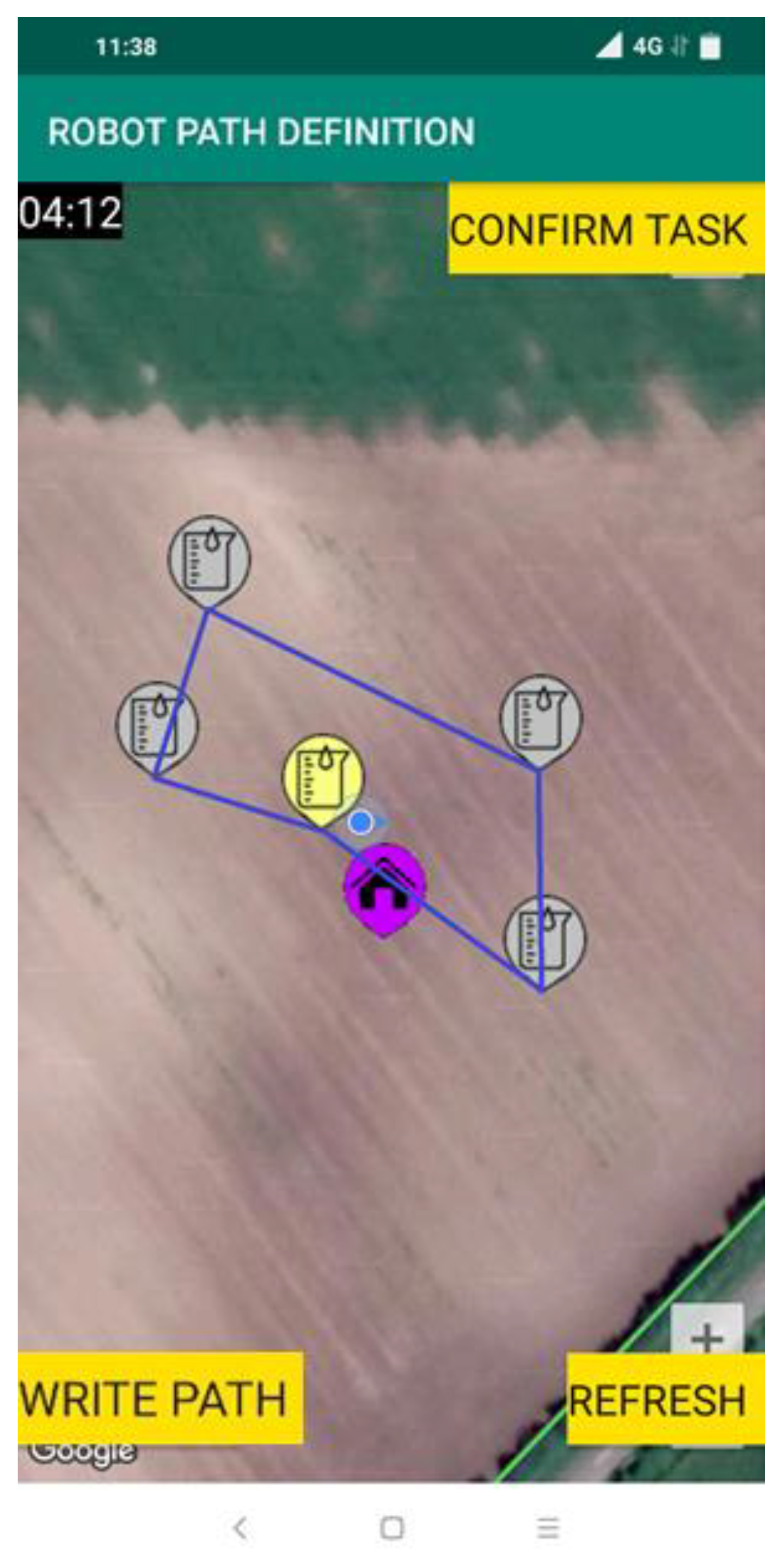
2.2. Smartphone Application
- A field for entering the email address of the user that defined the soil sampling and analysis task is needed for downloading the task.
- A button “DEFINING ROBOT PATH” is used to define a new robot path.
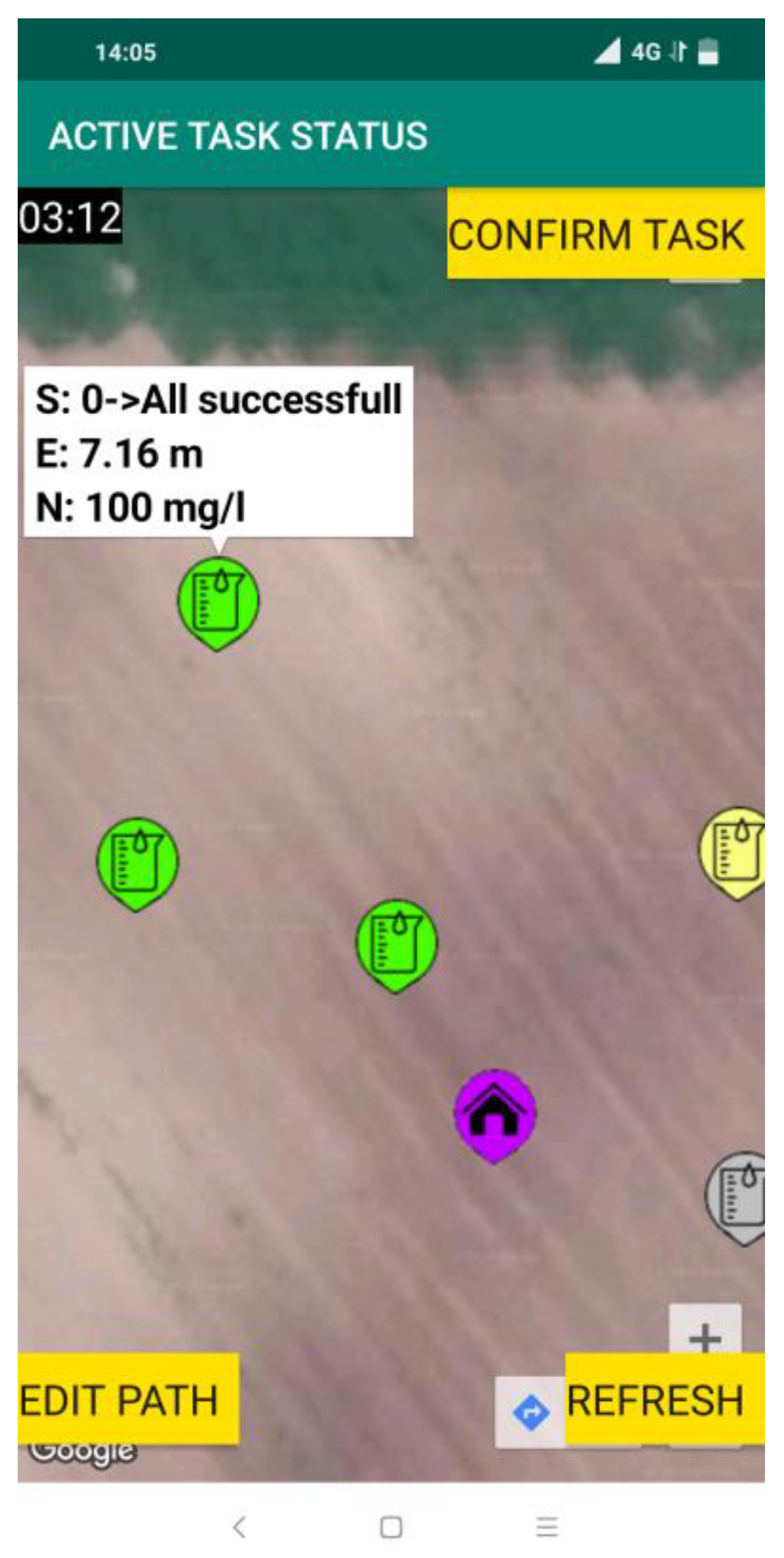
- A button “ACTIVE TASK STATUS” is used to display the status of the active robot task.
- A button “MEASUREMENT RESULTS” is used to quickly display currently measured nitrate values.
- A button “ROBOT STATUS” is used to display robot status (battery level, water level, and system errors).
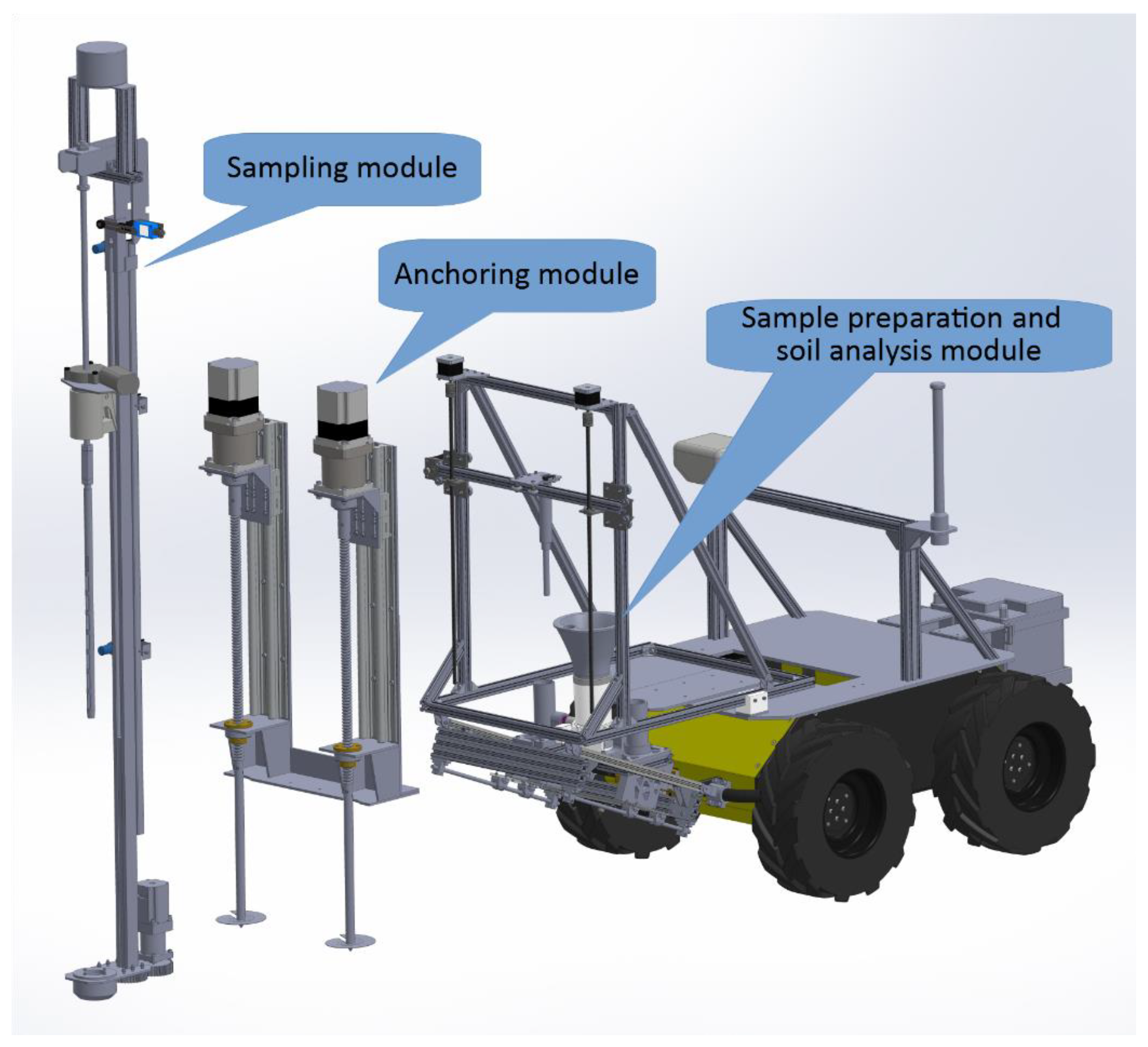
2.3. Robotic System
- Anchoring module.
- Sampling module.
- Sample preparation module.
- Module for soil analysis.
- UGV Husky platform, with software based on ROS (Robot Operating System) running on Linux.
- Custom electronics based on ATMega MEGA 2560, with firmware based on C++.
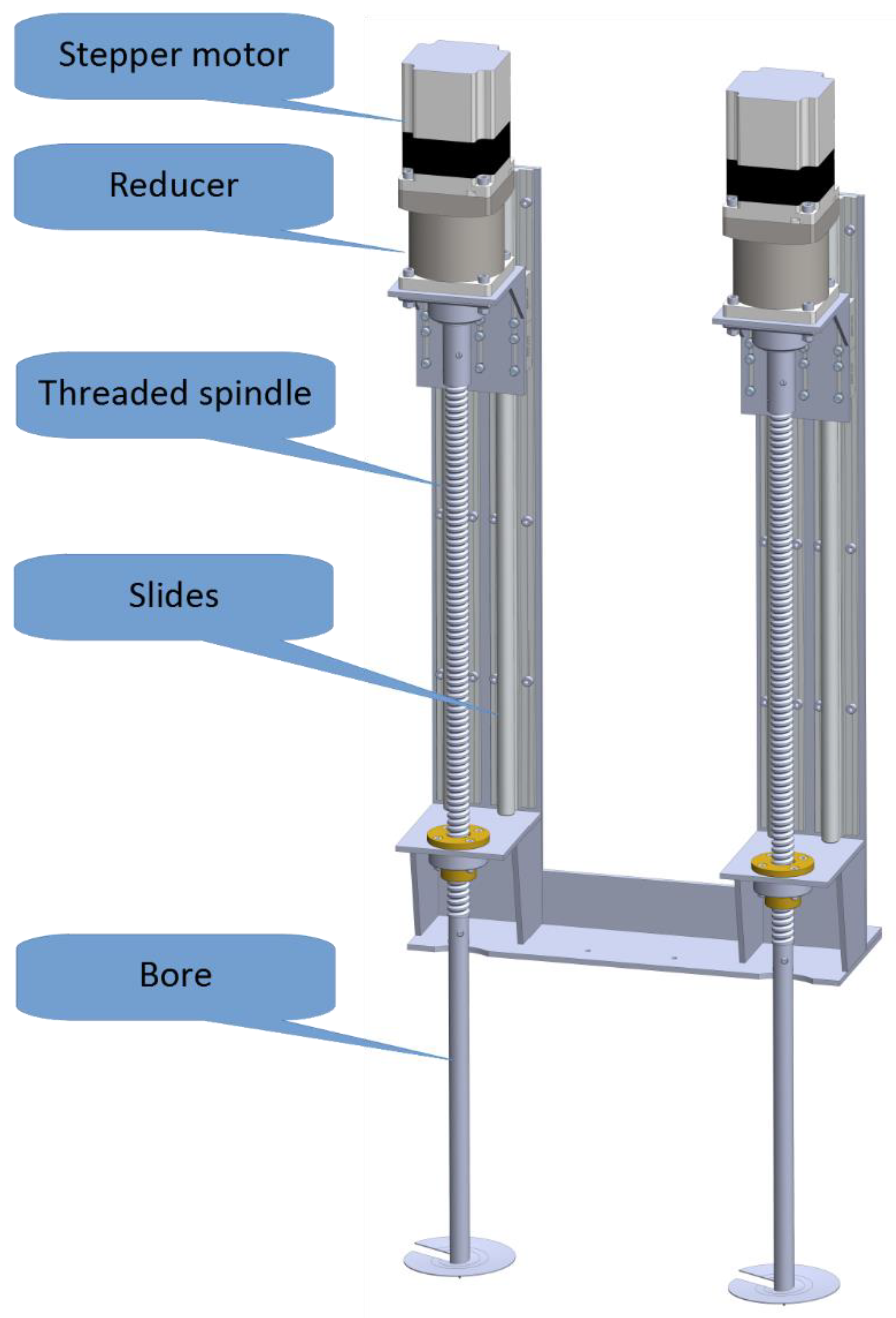
2.3.1. Anchoring Module
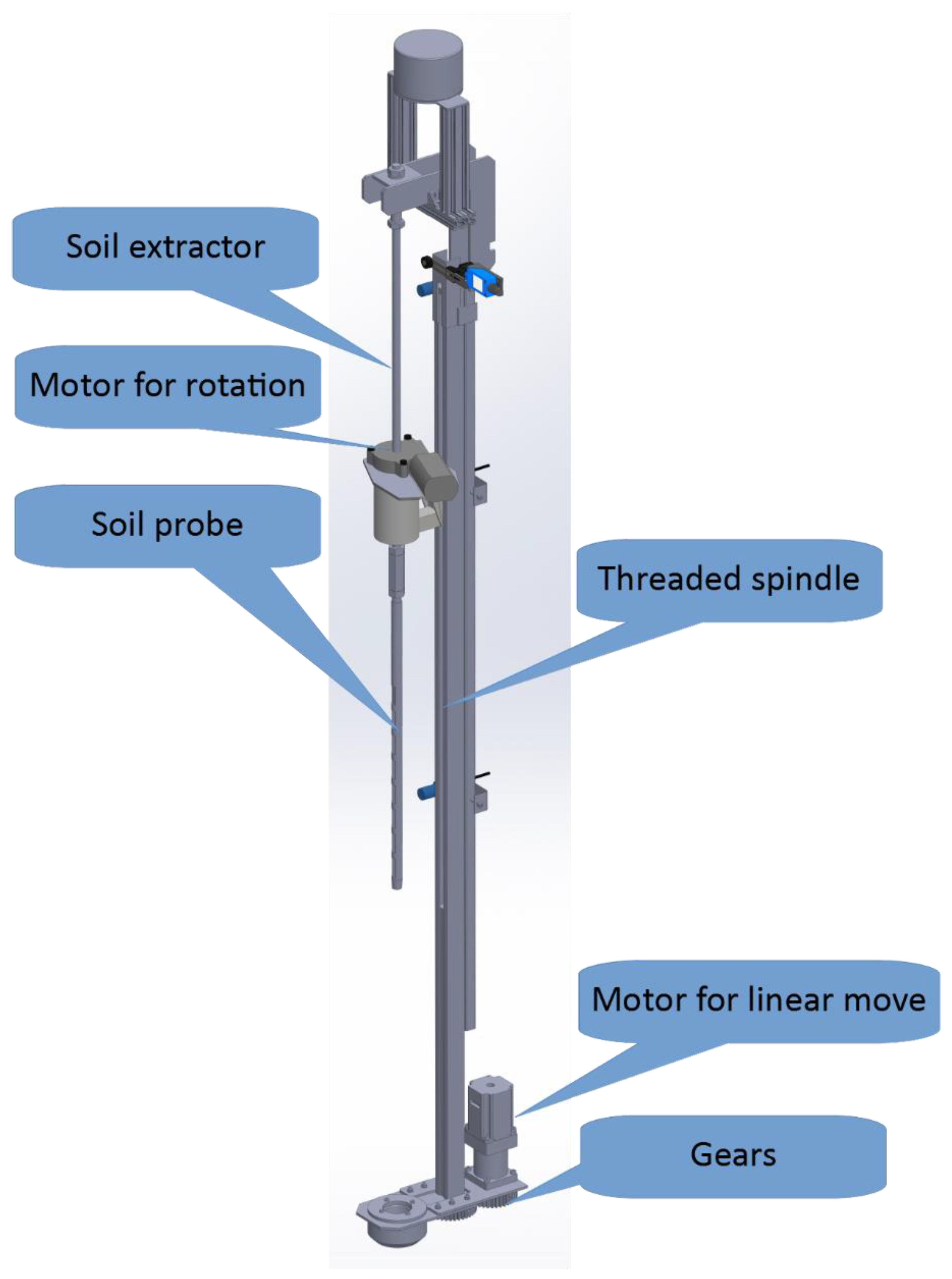
2.3.2. Sampling Module
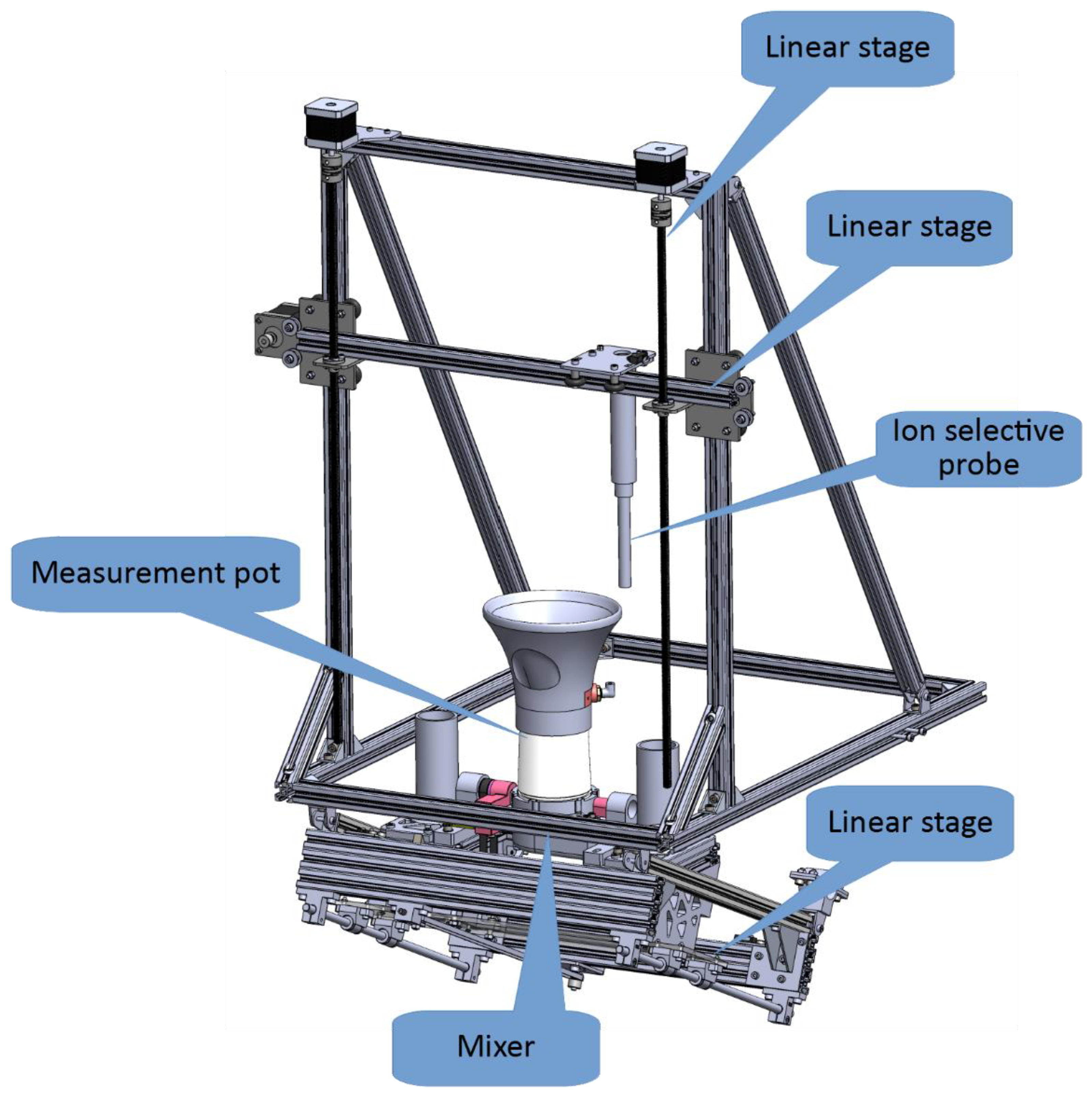
2.3.3. Sample Preparation Module
- Three NEMA 17 stepper motors and associated end switches for linear movement.
- One geared DC motor for the rotation of the pot.
- One brushless motor to mix the sample.
- Two aluminum load cells to measure the soil sample weight, and the weight of added water.
- A magnetic locker.
- Two water pumps with a DI water reservoir.
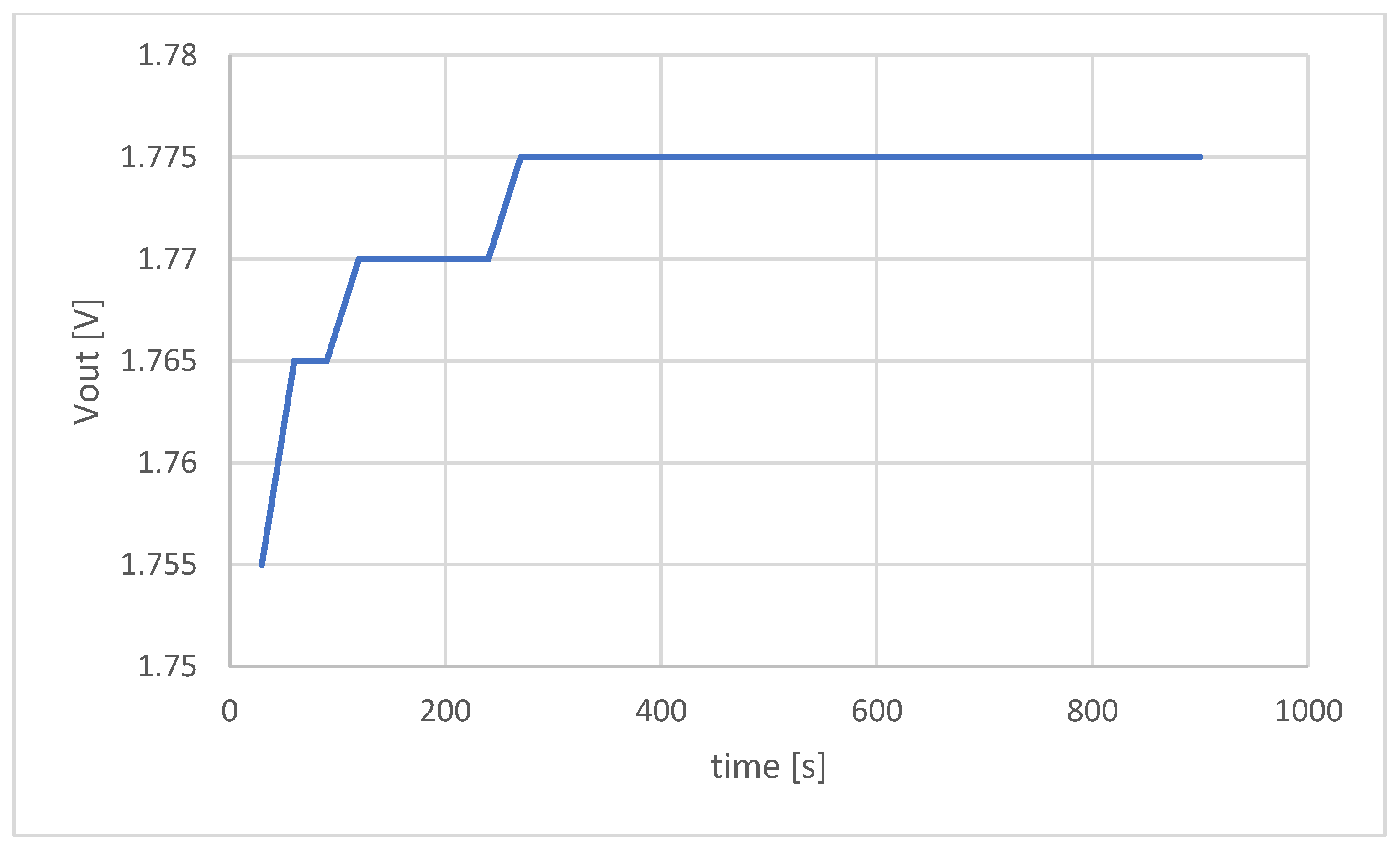
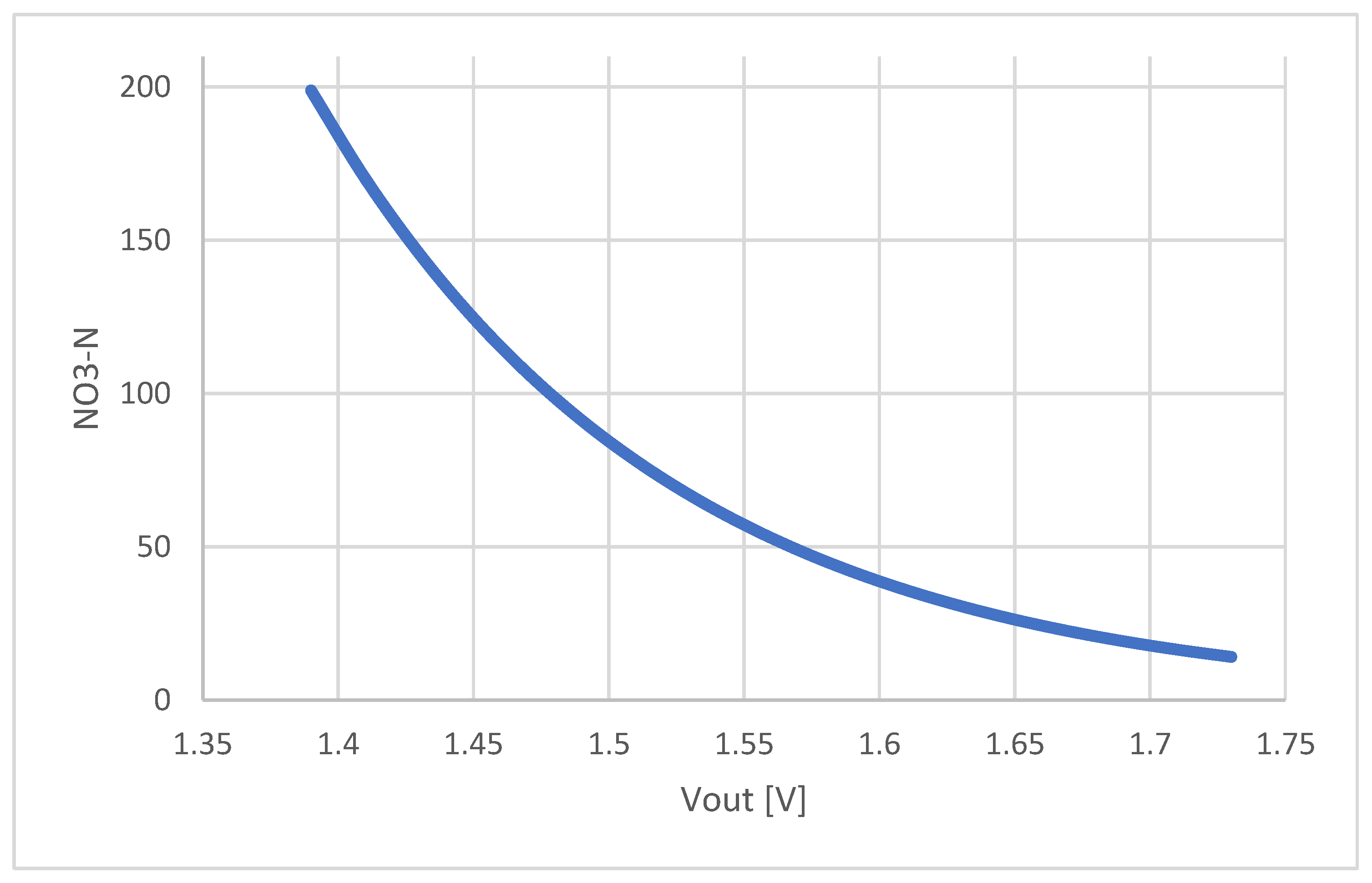
2.3.4. Module for Soil Analysis
2.3.5. ROS Implementation
- actionlib—provides a standardized interface for interfacing with preemptable tasks.
- amcl—a probabilistic localization system for a robot moving in 2D.
- costmap 2D—provides an implementation of a 2D costmap that takes in sensor data from the world, builds a 2D or 3D occupancy grid of the data.
- imu_tools—contains IMU-related filters and visualizers.
- navigation—a 2D navigation stack that takes in information from odometry, sensor streams, and a goal pose and outputs safe velocity commands that are sent to a mobile base.
- move_base—provides an implementation of an action that, given a goal in the world, will attempt to reach it with a mobile base.
- nmea_comms and nmea_msgs—for interfacing GPS.
- rosserial—for wrapping standard ROS serialized messages and multiplexing multiple topics and services over a character device such as a serial port or network socket.
- tf2—lets the user keep track of multiple coordinate frames over time.
2.3.6. Electronics
2.3.7. An Overview of the System
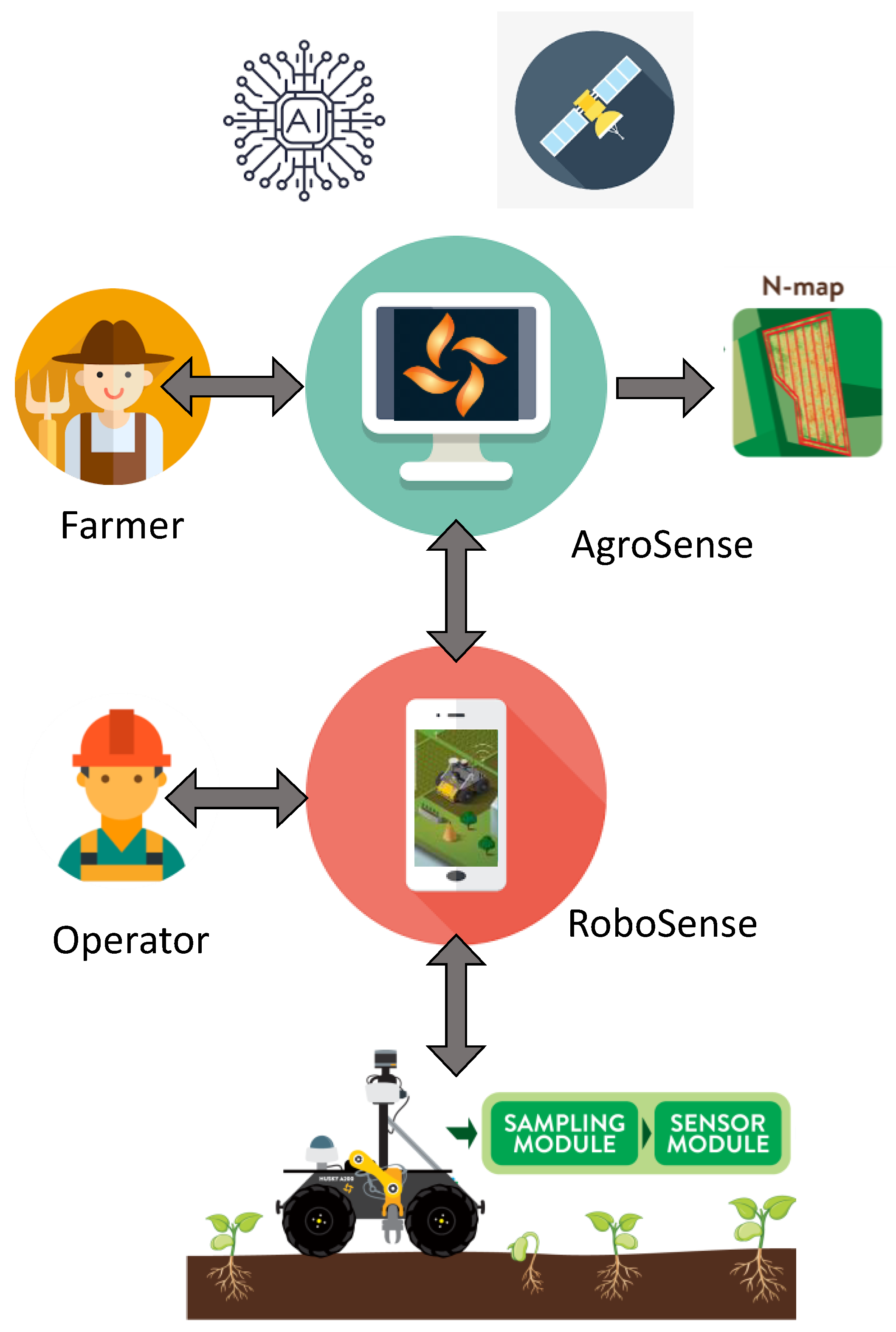
- A farmer defines soil sampling and analysis tasks with the help of the AgroSense platform.
- The Operator downloads the specific task from the AgroSense platform with the help of the RoboSense smartphone application and defines the optimal route.
- The task prepared by the Operator is uploaded to the robotic system via the RoboSense server.
- The robotic system performs the soil sampling and analysis task and during the process, the status of robotic system operations is being refreshed.
- Once the task is finished, the Operator uploads the measurement results to the AgroSense platform.
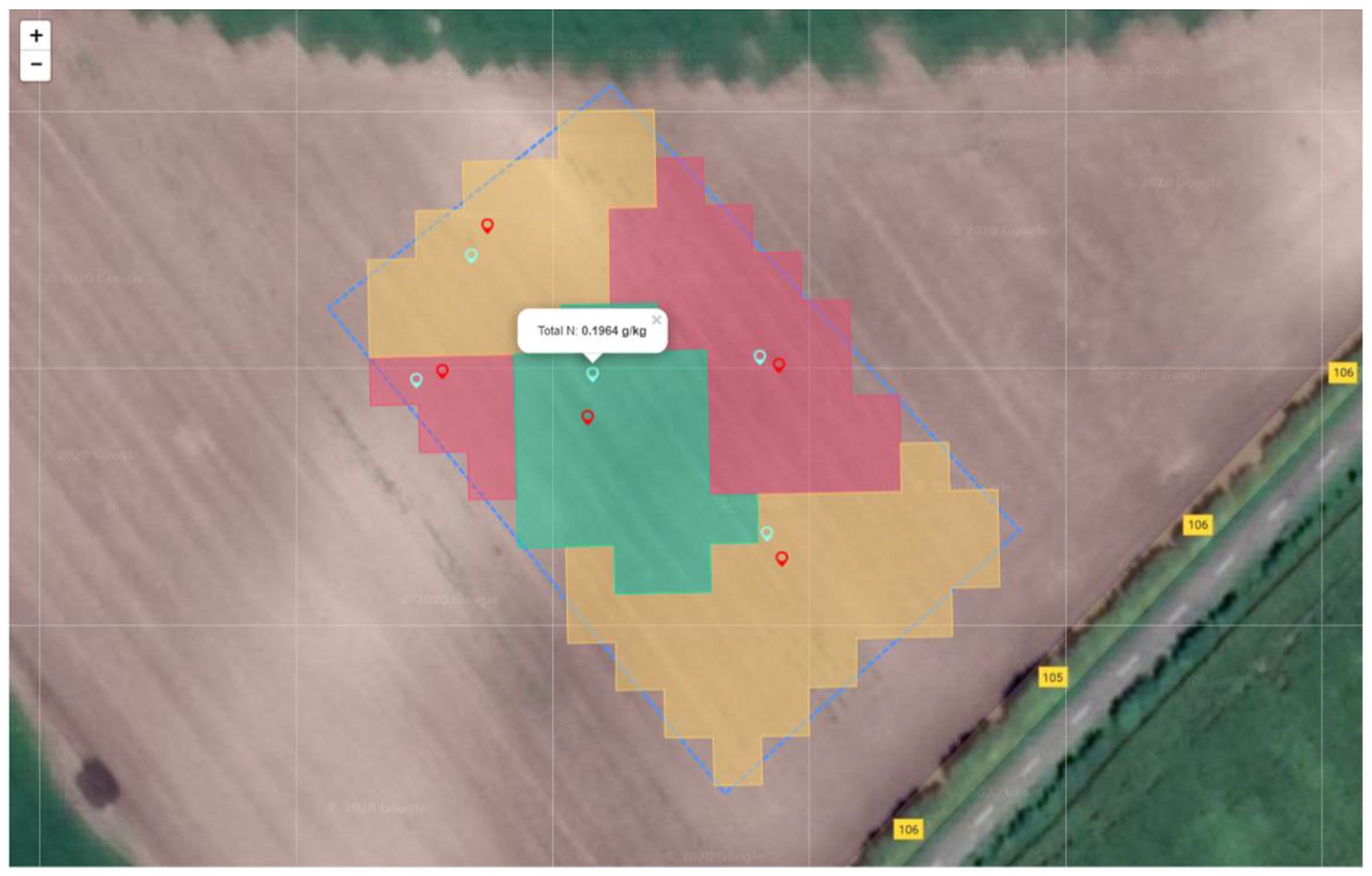
- A farmer selects the task to visualize the results for nitrogen content measurements.
- A farmer creates a fertilization prescription map for the desired type of fertilizer.
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bruinsma, J. (Ed.) Chapter 1 Introduction and overview. In World Agriculture: Towards 2015/2030, An FAO Perspective, 1st ed.; Earthscan Publications Ltd.: London, UK, 2003; pp. 1–28. [Google Scholar]
- Houlès, V.; Guérif, M.; Mary, B. Elaboration of a Nitrogen Nutrition Indicator for Winter Wheat Based on Leaf Area Index and Chlorophyll Content for Making Nitrogen Recommendations. Eur. J. Agron. 2007, 27, 1–11. [Google Scholar] [CrossRef]
- Pennock, D.; Yates, T.; Braidek, J. Chapter 1 Soil Sampling design. In Soil Sampling and Methods of Analysis, 2nd ed.; Carter, M.R., Gregorich, E.G., Eds.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2006; pp. 25–38. [Google Scholar]
- Four Soil Collection Methods That Actually Work. Available online: https://growers.ag/blog/4-soil-collection-methods-that-actually-work/ (accessed on 13 April 2022).
- Martínez-Dalmau, J.; Berbel, J.; Ordóñez-Fernández, R. Nitrogen Fertilization. A Review of the Risks Associated with the Ineffi-ciency of Its Use and Policy Responses. Sustainability 2021, 13, 5625. [Google Scholar] [CrossRef]
- Sikora, J.; Niemiec, M.; Szeląg-Sikora, A.; Gródek-Szostak, Z.; Kuboń, M.; Komorowska, M. The Impact of a Controlled-Release Fertilizer on Greenhouse Gas Emissions and the Efficiency of the Production of Chinese Cabbage. Energies 2020, 13, 2063. [Google Scholar] [CrossRef] [Green Version]
- Aravind, K.R.; Raja, P.; Pérez-Ruiz, M. Task-based agricultural mobile robots in arable farming: A review. Span J. Agric. Res. 2007, 15, e02R01. [Google Scholar] [CrossRef]
- Blackmore, B.S.; Fountas, S.; Gemtos, T.A.; Griepentrog, H.W. A Specification for an Autonomous Crop Production Mechanization System. Acta Hortic. 2009, 824, 201–216. [Google Scholar] [CrossRef] [Green Version]
- Rossel, R.A.V.; McBratney, A.B. Soil Chemical Analytical Accuracy and Costs: Implications from Precision Agriculture. Aust. J. Exp. Agric. 1998, 38, 765. [Google Scholar] [CrossRef]
- McGrath, D.; Skotnikov, A. Possibility of Different Soil Sampling Techniques with Automated Soil Sampler. Commun. Soil Sci. Plant Anal. 1996, 27, 1779–1794. [Google Scholar] [CrossRef]
- Rogo Ag. Available online: https://rogoag.com/ (accessed on 13 April 2022).
- Olmedo, N.A.; Barczyk, M.; Zhang, H.; Wilson, W.; Lipsett, M.G. A UGV-Based Modular Robotic Manipulator for Soil Sampling and Terramechanics Investigations. J. Unmanned Veh. Syst. 2020, 8, 364–381. [Google Scholar] [CrossRef]
- Cao, P.M.; Hall, E.L.; Zhang, E. Soil Sampling Sensor System on a Mobile Robot. SPIE Proc. 2003. [Google Scholar] [CrossRef]
- Vaeljaots, E.; Lehiste, H.; Kiik, M.; Leemet, T. Soil Sampling Automation Case-Study Using Unmanned Ground Vehicle. Eng. Rural. Dev. 2018, 17, 982–987. [Google Scholar] [CrossRef]
- HUSKY Unmanned Ground Vehicle. Available online: https://clearpathrobotics.com/husky-unmanned-ground-vehicle-robot/#:~:text=Husky%20is%20a%20medium%20sized,UGV%20by%20our%20integration%20experts (accessed on 30 March 2022).
- AgroSense Digital Platform. Available online: https://agrosens.rs/#/app-h/about (accessed on 13 April 2022).
- Sabbe, W.E.; Marx, D.B. Soil sampling: Spatial and temporal variability. In Soil Testing: Sampling, Correlation, Calibration, and Interpretation; SSSA: Washington, DC, USA, 1987; Volume 21, 14p. [Google Scholar]
- Wollenhaupt, N.C.; Wolkowski, R.P. Grid soil sampling. Better Crops 1994, 78, 6–9. [Google Scholar]
- Khosla, R.; Fleming, K.; Delgado, J.A.; Shaver, T.M.; Westfall, D.G. Use of site specific management zones to improve nitro-gen management for precision agriculture. J. Soil Water Conserv. 2002, 57, 513–518. [Google Scholar]
- Ali, A.; Rondelli, V.; Martelli, R.; Falsone, G.; Lupia, F.; Barbanti, L. Management Zones Delineation through Clustering Techniques Based on Soils Traits, NDVI Data, and Multiple Year Crop Yields. Agriculture 2022, 12, 231. [Google Scholar] [CrossRef]
- Jaynes, D.B.; Kaspar, T.C.; Colvin, T.S.; James, D.E. Cluster Analysis of Spatiotemporal Corn Yield Patterns in an Iowa Field. Agron. J. 2003, 95, 574–586. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M.; Shouse, P.J.; Soppe, R.; Ayars, J.E. Identifying Soil Properties That Influence Cotton Yield Using Soil Sampling Directed by Apparent Soil Electrical Conductivity. Agron. J. 2003, 95, 352–364. [Google Scholar] [CrossRef] [Green Version]
- Hansen, P.M.; Schjoerring, J.K. Reflectance Measurement of Canopy Biomass and Nitrogen Status in Wheat Crops Using Normalized Difference Vegetation Indices and Partial Least Squares Regression. Remote Sens. Environ. 2003, 86, 542–553. [Google Scholar] [CrossRef]
- Guastaferro, F.; Castrignanò, A.; De Benedetto, D.; Sollitto, D.; Troccoli, A.; Cafarelli, B. A Comparison of Different Algorithms for the Delineation of Management Zones. Precis. Agric. 2010, 11, 600–620. [Google Scholar] [CrossRef]
- Ormsby, J.P.; Choudhury, B.J.; Owe, M. Vegetation spatial variability and its effect on vegetation indices. Int. J. Remote Sens. 1987, 8, 1301–1306. [Google Scholar] [CrossRef]
- Townshend, J.R.G.; Justice, C.O. Spatial variability of images and the monitoring of changes in the normalized difference vegetation index. Int. J. Remote Sens. 1995, 16, 2187–2195. [Google Scholar] [CrossRef]
- Ali, A.; Martelli, R.; Lupia, F.; Barbanti, L. Assessing multiple years’ spatial variability of crop yields using satellite vegetation indices. Remote Sens. 2019, 11, 2384. [Google Scholar] [CrossRef] [Green Version]
- Glenn, E.P.; Huete, A.R.; Nagler, P.L.; Nelson, S.G. Relationship between remotely-sensed vegetation indices, canopy attributes and plant physiological processes: What vegetation indices can and cannot tell us about the landscape. Sensors 2008, 8, 2136–2160. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marino, S.; Alvino, A. Vegetation Indices Data Clustering for Dynamic Monitoring and Classification of Wheat Yield Crop Traits. Remote Sens. 2021, 13, 541. [Google Scholar] [CrossRef]
- Praetyo, S.Y.J.; Hartomo, K.D.; Simanjuntak, B.H.; Candra, D.W. Mitigation & identification for local aridity, based of vegetation indices combined with spatial statistics & clustering k means. IOP Publishing. J. Phys. Conf. Ser. 2019, 1235, 012028. [Google Scholar] [CrossRef]
- Netto, A.F.A.; Martins, R.N.; de Souza, G.S.A.; de Moura Araújo, G.; de Almeida, S.L.H.; Capelini, V.A. Segmentation of RGB images using different vegetation indices and thresholding methods. Nativa 2018, 6, 389–394. [Google Scholar] [CrossRef]
- Sinfield, J.V.; Fagerman, D.; Colic, O. Evaluation of Sensing Technologies for On-the-Go Detection of Macro-Nutrients in Cultivated Soils. Comput. Electron. Agric. 2010, 70, 1–18. [Google Scholar] [CrossRef]
- Vernier NO3-BTA. Available online: https://www.vernier.com/manuals/no3-bta/ (accessed on 13 April 2022).
- Bremner, J.M. Total Nitrogen. In Agronomy Monographs; American Society of Agronomy: Washington, DC, USA, 2016; pp. 1149–1178. [Google Scholar] [CrossRef]
- Olness, A.; Lopez, D.; Archer, D.; Cordes, J.; Sweeney, C.; Mattson, N.; Rinke, J.; Voorhees, W.B. Factors Affecting Microbial Formation of Nitrate-Nitrogen in Soil and Their Effects on Fertilizer Nitrogen Use Efficiency. Sci. World J. 2001, 1, 122–129. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agrobot Lala. Available online: https://www.youtube.com/watch?v=seU82D8w9RA (accessed on 14 April 2022).
- Cui, Z.; Zhang, F.; Miao, Y.; Sun, Q.; Li, F.; Chen, X.; Li, J.; Ye, Y.; Yang, Z.; Zhang, Q.; et al. Soil Nitrate-N Levels Required for High Yield Maize Production in the North China Plain. Nutr. Cycl. Agroecosyst. 2008, 82, 187–196. [Google Scholar] [CrossRef]
- CleanGrow Multi-Ion Nutrient Analyzer Kit. Available online: https://www.ionselectiveelectrode.com/products/cleangrow-multi-ion-nutrient-analyzer-kit (accessed on 13 April 2022).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
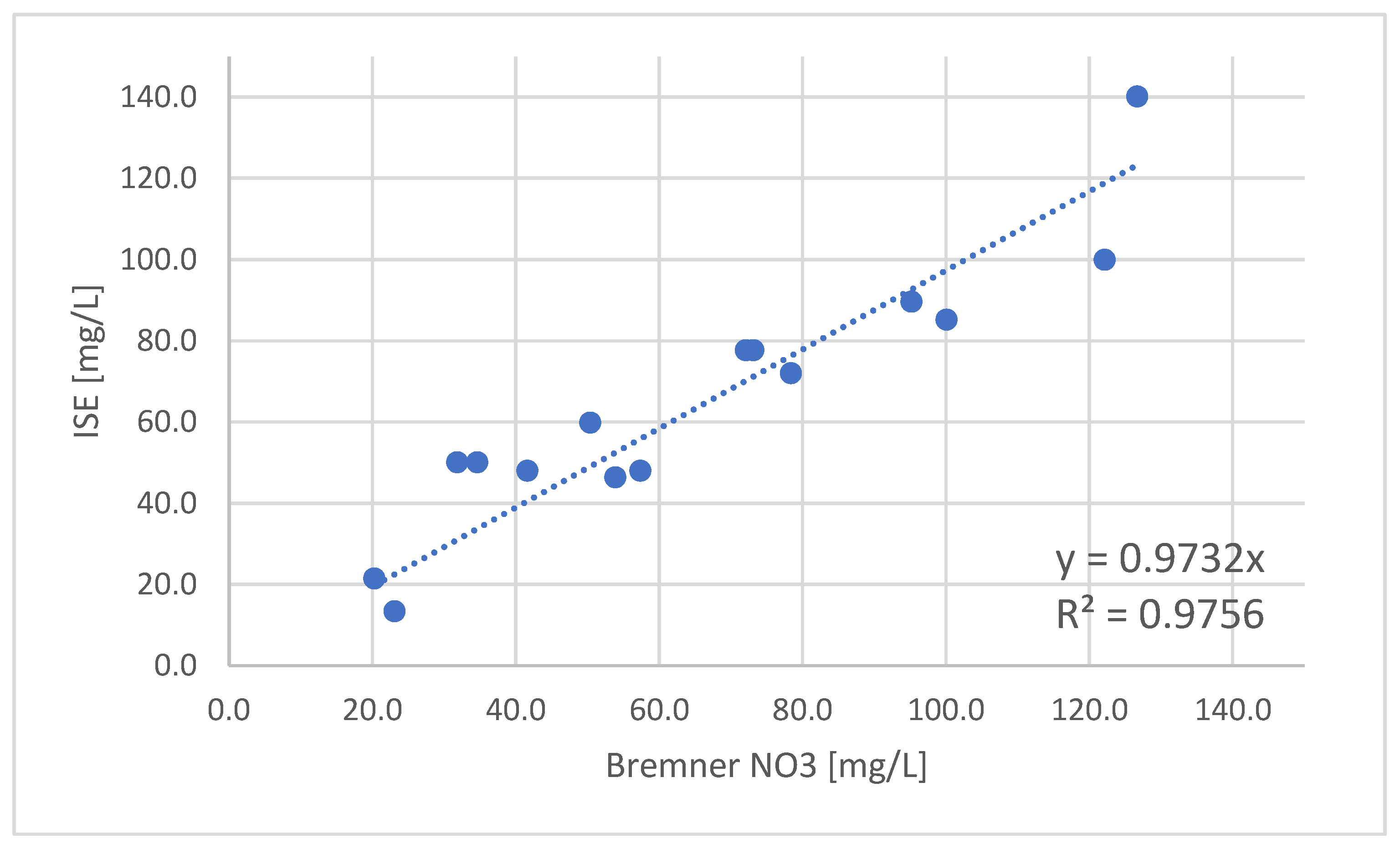
| Sample | Bremner NO3-N [mg/L] | ISE NO3-N [mg/L] |
|---|---|---|
| 1 | 20.3 | 21.4 |
| 2 | 23.1 | 13.3 |
| 3 | 31.9 | 50 |
| 4 | 34.7 | 50 |
| 5 | 41.7 | 47.9 |
| 6 | 50.4 | 59.8 |
| 7 | 53.9 | 46.3 |
| 8 | 57.4 | 47.9 |
| 9 | 72.1 | 77.6 |
| 10 | 73.2 | 77.6 |
| 11 | 78.4 | 71.9 |
| 12 | 95.2 | 89.5 |
| 13 | 100.1 | 85.1 |
| 14 | 122.2 | 99.9 |
| 15 | 126.7 | 140.1 |
| Sample | Mass [g] | NO3 [mg/L] | NO3-N [kg N ha−1] |
|---|---|---|---|
| 1 | 37.06 | 196.38 | 177.00 |
| 2 | 23.27 | 175.01 | 157.74 |
| 3 | 36.05 | 85.07 | 76.68 |
| 4 | 45.52 | 91.70 | 82.65 |
| 5 | 33.35 | 98.64 | 88.91 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kitić, G.; Krklješ, D.; Panić, M.; Petes, C.; Birgermajer, S.; Crnojević, V. Agrobot Lala—An Autonomous Robotic System for Real-Time, In-Field Soil Sampling, and Analysis of Nitrates. Sensors 2022, 22, 4207. https://doi.org/10.3390/s22114207
Kitić G, Krklješ D, Panić M, Petes C, Birgermajer S, Crnojević V. Agrobot Lala—An Autonomous Robotic System for Real-Time, In-Field Soil Sampling, and Analysis of Nitrates. Sensors. 2022; 22(11):4207. https://doi.org/10.3390/s22114207
Chicago/Turabian StyleKitić, Goran, Damir Krklješ, Marko Panić, Csaba Petes, Slobodan Birgermajer, and Vladimir Crnojević. 2022. "Agrobot Lala—An Autonomous Robotic System for Real-Time, In-Field Soil Sampling, and Analysis of Nitrates" Sensors 22, no. 11: 4207. https://doi.org/10.3390/s22114207