
Scheimpflug Camera-Based Technique for Multi-Point Displacement Monitoring of Bridges


Abstract
:1. Introduction
2. Materials and Methods
2.1. Limitations of Multi-Point Displacement Measurement Using Conventional Camera
2.1.1. The Contradiction between a Wide FOV and High-Resolution
2.1.2. Narrow DOF at High Magnification
2.2. Multi-Point Displacement Measurement of Bridges Using Scheimpflug Camera
2.2.1. Scheimpflug Camera-Based Measurement System and Displacement Calculation Algorithm
2.2.2. Motion Compensation of Scheimpflug Camera
- Errors caused by camera rotation around x-axis and y-axis

- 2.
- Errors caused by camera translation along x and y directions

- 3.
- Displacement calculation with camera motion compensation
- 4.
- Measurement stage
- (1)
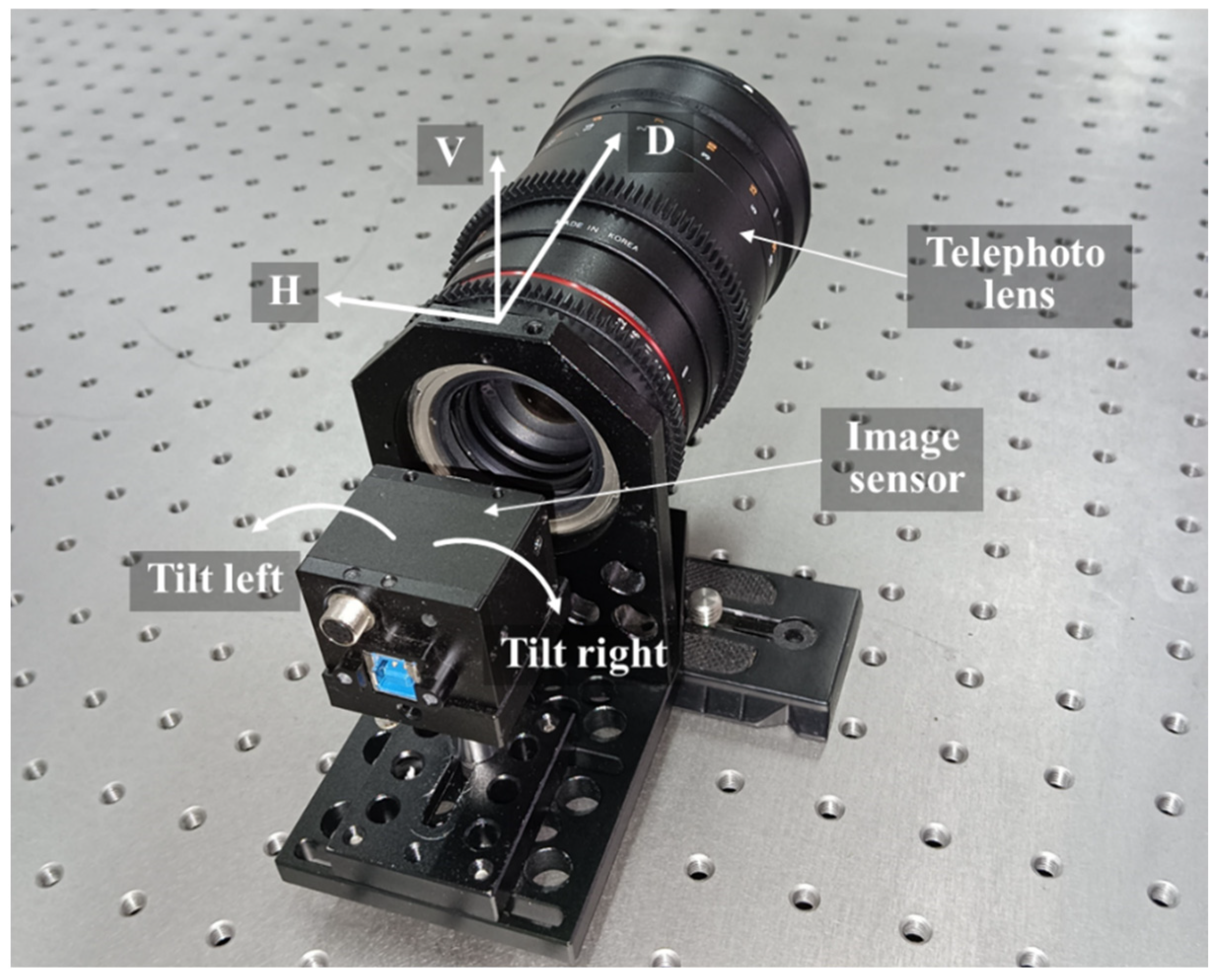
- After installation of the Scheimpflug camera, one must read the tilt angle (α) of the image sensor on the Scheimpflug adapter (the resolution of the adapter is 0.1°) and determine the tilt direction. When the measurement starts, the tilt angle and direction of the image sensor remain unchanged.
- (2)
- The Scheimpflug camera measures (xp, yp)i, (xa, ya)i and (xb, yb)i for each target in the i-th image.
- (3)
- The uncorrected physical displacements , and in the i-th image are calculated with respect to the reference image.
- (4)
- According to the tilt direction of the image sensor, the error components and of the reference target A and B in the i-th image are calculated by using Equations (4), (5), (7), (12) and (22), or Equations (4), (5), (10), (14) and (22).
- (5)
- According to the tilt direction of the image sensor, the error components of the target P in the i-th image are calculated by using Equations (8), (13), (19) and (21) or Equations (11), (15), (19) and (21).
- (6)
- The corrected physical displacement of the target P in the i-th image is calculated by using Equation (3). Note that this approach assumes that the out-of-plane motion of the target can be neglected. The displacement calculation process of other measuring targets is the same as that of target P.
3. Experiment Validation
3.1. Validation through a Slide Table Test
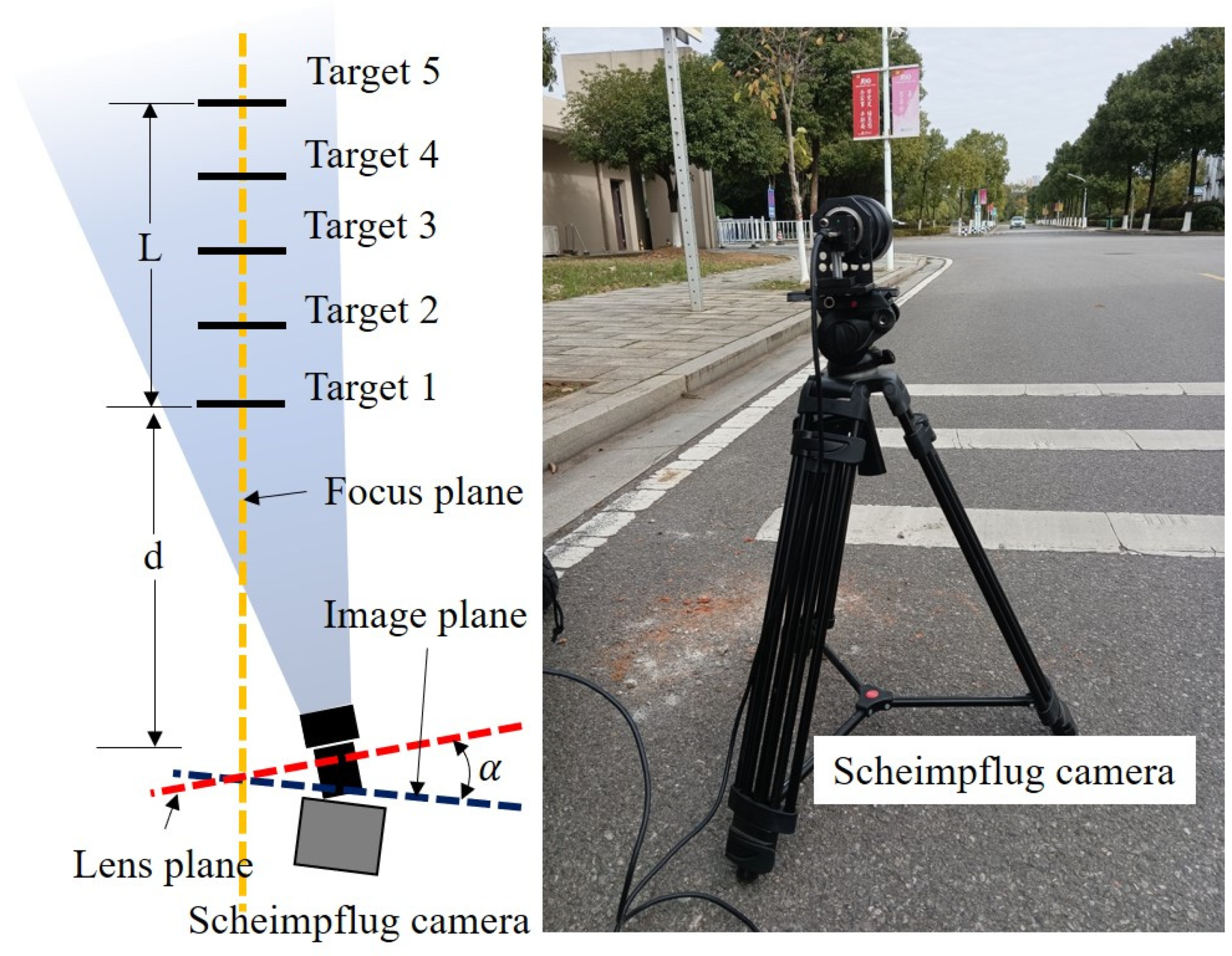
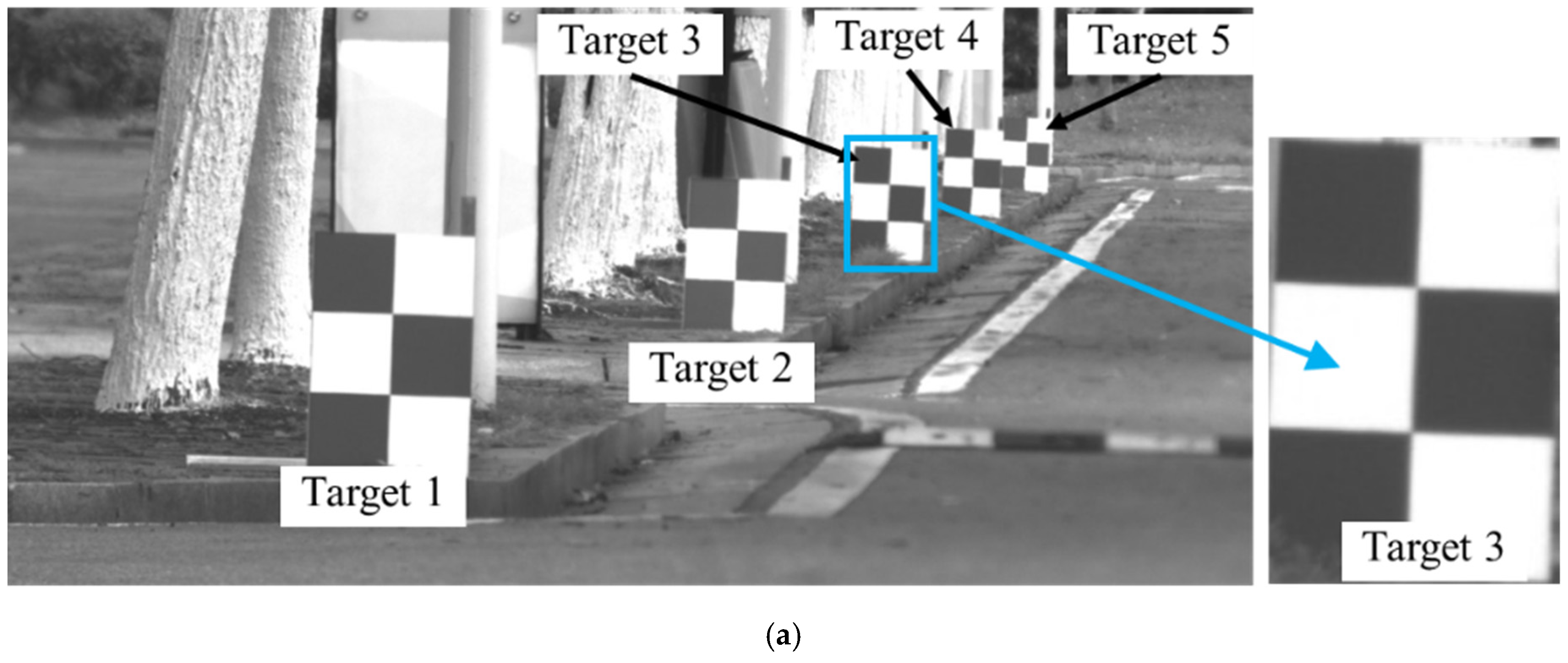
3.2. Outdoor Test Using Static Targets
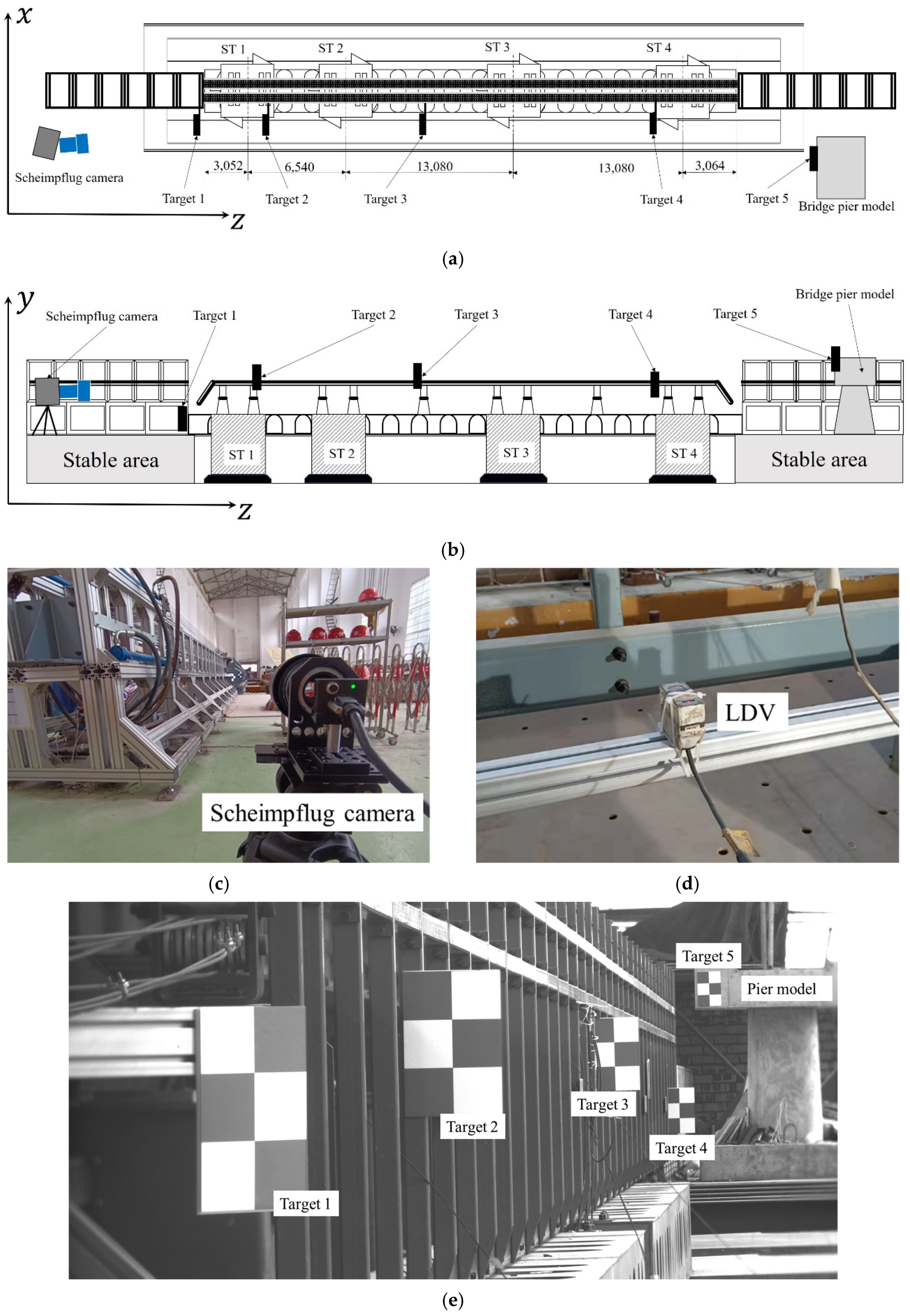
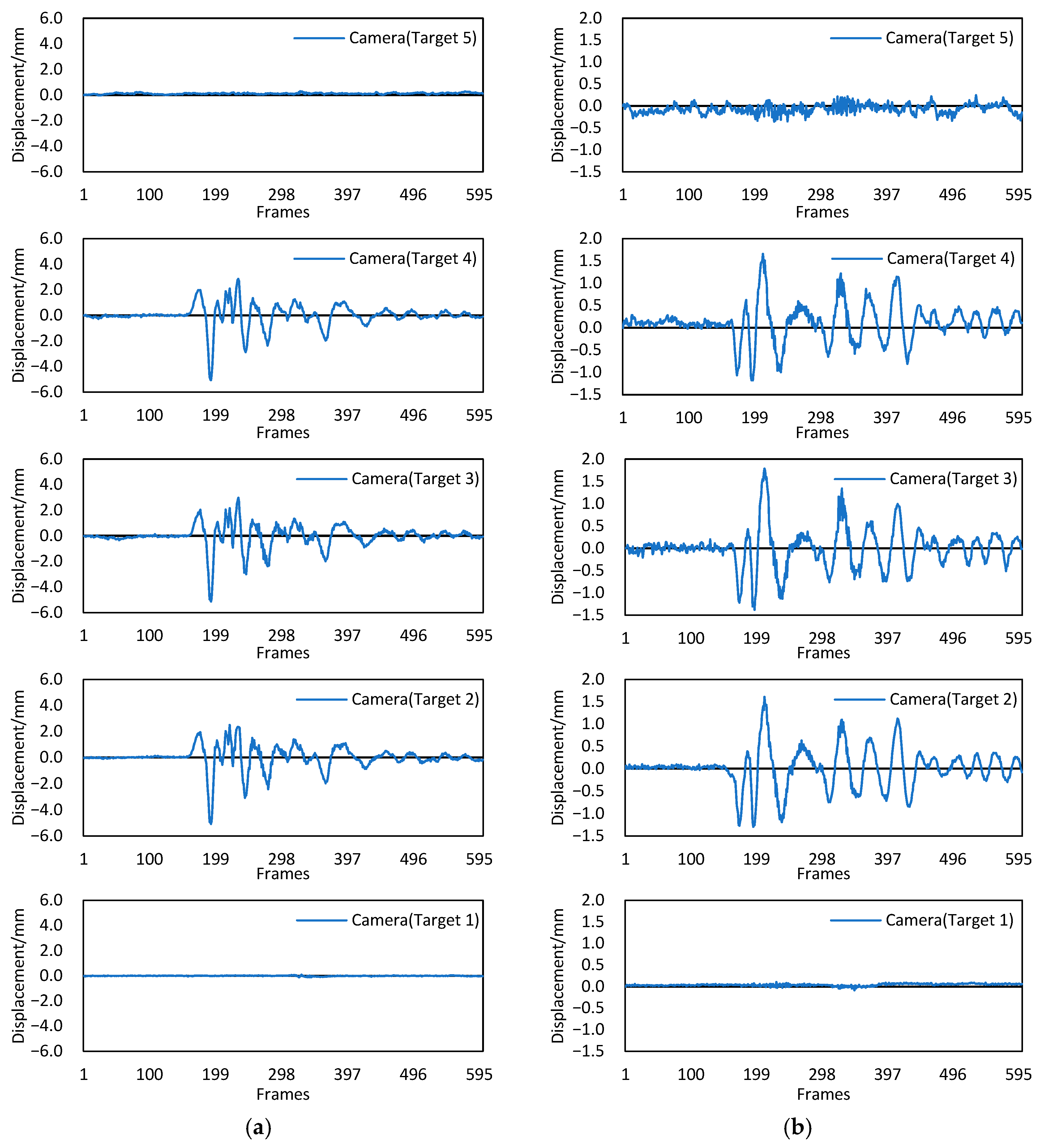
3.3. Bridge Model Experiment
4. Discussion
- (1)
- Out-of-plane motion of target
- (2)
- The proposed motion compensation method does not consider the out-of-plane motion of the target; that is, the displacement of the bridge along the road direction is ignored. However, in practical applications, the out-of-plane motion of the target is inevitable, which causes additional calculation errors of scale conversion factors when high-magnification-ratio images are captured through a super-telephoto lens. This decreases the measurement accuracy of our method. Therefore, the proposed method needs to be further optimized.
- (3)
- Placement restrictions in camera installation
- (4)
- The camera must be installed close to the bridge. In Figure 15c, the shortest distance between the camera and the bridge model is approximately 1.0 m, and only such a short distance can ensure that all targets can be collected in a narrow camera view. However, when monitoring actual bridges, there may be insufficient installation space in front of the bridge.
- (5)
- Image noise, blur and deformation caused by remote measurement
- (6)
- As shown in Figure 14, when the span length of the bridge or measurement distance increases, the measurement accuracy reduces significantly owing to the noise, blur and deformation of the image. Unmanned aerial vehicles (UAVs) can provide an opportunity to capture bridge images more effectively by bringing the camera closer to the bridge; thus, the UAV equipped with the Scheimpflug camera can be used to realize the short-distance measurement, so as to further improve the accuracy of the Scheimpflug camera-based technique in bridge monitoring. However, the distance (span length of the bridge) between the two piers for fixing reference targets will still restrict the effectiveness of camera motion compensation, which makes the proposed method difficult to be applied to long-span bridges, such as suspension bridges or cable-stayed bridges.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Novacek, G. Accurate Linear Measurement Using LVDTs. Circuit Cellar Ink 1999, 106, 20–27. [Google Scholar]
- Nassif, H.H.; Gindy, M.; Davis, J. Comparison of Laser Doppler Vibrometer with Contact Sensors for Monitoring Bridge Deflection and Vibration. Ndt E Int. 2005, 38, 213–218. [Google Scholar] [CrossRef]
- Celebi, M. Gps in Dynamic Monitoring of Long-Period Structures; Springer: Dordrecht, The Netherlands, 2001. [Google Scholar]
- Nakamura, S.-I. GPS Measurement of Wind-Induced Suspension Bridge Girder Displacements. J. Struct. Eng. 2000, 126, 1413–1419. [Google Scholar] [CrossRef]
- Mayer, L.; Yanev, B.; Olson, L.D.; Smyth, A. Monitoring of the Manhattan Bridge and Interferometric Radar Systems. 2010. Available online: https://www.researchgate.net/publication/283605971_Monitoring_of_the_Manhattan_Bridge_and_Interferometric_Radar_Systems (accessed on 4 May 2022).
- Zschiesche, K. Image Assisted Total Stations for Structural Health Monitoring—A Review. Geomatics 2022, 2, 1–16. [Google Scholar] [CrossRef]
- Paar, R.; Marendic, A.; Jakopec, I.; Grgac, I. Vibration Monitoring of Civil Engineering Structures Using Contactless Vision-Based Low-Cost IATS Prototype. Sensors 2021, 21, 7952. [Google Scholar] [CrossRef]
- Paar, R.; Roic, M.; Marendic, A.; Miletic, S. Technological Development and Application of Photo and Video Theodolites. Appl. Sci. 2021, 11, 3893. [Google Scholar] [CrossRef]
- Feng, D.; Scarangello, T.; Feng, M.Q.; Ye, Q. Cable Tension Force Estimate Using Novel Noncontact Vision-Based Sensor. Measurement 2017, 99, 44–52. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q.; Ozer, E.; Fukuda, Y. A Vision-Based Sensor for Noncontact Structural Displacement Measurement. Sensors 2015, 15, 16557–16575. [Google Scholar] [CrossRef]
- Huang, M.; Zhang, B.; Lou, W. A Computer Vision-Based Vibration Measurement Method for Wind Tunnel Tests of High-Rise Buildings-ScienceDirect. J. Wind Eng. Ind. Aerodyn. 2018, 182, 222–234. [Google Scholar] [CrossRef]
- Lydon, D.; Lydon, M.; Taylor, S.; Rincon, J.M.D.; Hester, D.; Brownjohn, J. Development and Field Testing of a Vision-Based Displacement System Using a Low Cost Wireless Action Camera. Mech. Syst. Signal Process. 2019, 121, 343–358. [Google Scholar] [CrossRef] [Green Version]
- Dabous, S.A.; Feroz, S. Condition Monitoring of Bridges with Non-Contact Testing Technologies. Autom. Constr. 2020, 116, 103224. [Google Scholar] [CrossRef]
- Rau, J.; Jhan, J.-P.; Andaru, R. Landslide Deformation Monitoring by Three-Camera Imaging System. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Enschede, The Netherlands, 10–14 June 2019; Volume XLII-2/W13, pp. 559–565. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.J.; Shinozuka, M. A Vision-Based System for Remote Sensing of Bridge Displacement. NDT E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Miguel, V.; Dorys, G.; Jesus, M.; Thomas, S. A Novel Laser and Video-Based Displacement Transducer to Monitor Bridge Deflections. Sensors 2018, 18, 970. [Google Scholar]
- Xing, L.; Dai, W.; Zhang, Y. Improving Displacement Measurement Accuracy by Compensating for Camera Motion and Thermal Effect on Camera Sensor. Mech. Syst. Signal Process. 2022, 167, 108525. [Google Scholar] [CrossRef]
- Luo, L.; Feng, M.Q.; Wu, Z.Y. Robust Vision Sensor for Multi-Point Displacement Monitoring of Bridges in the Field. Eng. Struct. 2018, 163, 255–266. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, H.; Yu, Y.; Xu, X.; Hu, W.; Li, M.; Ou, J. Bridge Displacement Monitoring Method Based on Laser Projection-Sensing Technology. Sensors 2015, 15, 8444–8463. [Google Scholar] [CrossRef]
- Ehrhart, M.; Lienhart, W. Monitoring of Civil Engineering Structures Using a State-of-the-Art Image Assisted Total Station. J. Appl. Geod. 2015, 9, 174–182. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.-C.; Jeong, S.; Lee, Y.-J.; Sim, S.-H. Long-Term Displacement Measurement of Full-Scale Bridges Using Camera Ego-Motion Compensation. Mech. Syst. Signal Process. 2020, 140, 106651. [Google Scholar] [CrossRef]
- Zhou, H.F.; Zheng, J.F.; Xie, Z.L.; Lu, L.J.; Ni, Y.Q.; Ko, J.M. Temperature Effects on Vision Measurement System in Long-Term Continuous Monitoring of Displacement. Renew. Energy 2017, 114, 968–983. [Google Scholar] [CrossRef]
- Daakir, M.; Zhou, Y.; Deseilligny, M.P.; Thom, C.; Martin, O.; Rupnik, E. Improvement of Photogrammetric Accuracy by Modeling and Correcting the Thermal Effect on Camera Calibration. ISPRS J. Photogramm. Remote Sens. 2019, 148, 142–155. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-J.; Ho, H.-N.; Lee, J.-H. A Vision-Based Dynamic Rotational Angle Measurement System for Large Civil Structures. Sensors 2012, 12, 7326–7336. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shang, Y.; Yu, Q.; Yang, Z.; Xu, Z.; Zhang, X. Displacement and Deformation Measurement for Large Structures by Camera Network. Opt. Lasers Eng. 2014, 54, 247–254. [Google Scholar] [CrossRef]
- Malesa, M.; Malowany, K.; Pawlicki, J.; Kujawinska, M.; Skrzypczak, P. Non-Destructive Testing of Industrial Structures with the Use of Multi-Camera Digital Image Correlation Method. Eng. Fail. Anal. 2016, 69, 122–134. [Google Scholar] [CrossRef]
- Malowany, K.; Malesa, M.; Kowaluk, T.; Kujawinska, M. Multi-Camera Digital Image Correlation Method with Distributed Fields of View. Opt. Lasers Eng. 2017, 98, 198–204. [Google Scholar] [CrossRef]
- Aliansyah, Z.; Shimasaki, K.; Jiang, M.; Takaki, T.; Ishii, I.; Yang, H.; Umemoto, C.; Matsuda, H. A Tandem Marker-Based Motion Capture Method for Dynamic Small Displacement Distribution Analysis. J. Robot. Mechatron. 2019, 31, 671–685. [Google Scholar] [CrossRef]
- Sun, C.; Liu, H.; Shang, Y.; Chen, S.; Yu, Q. Scheimpflug Camera-Based Stereo-Digital Image Correlation for Full-Field 3D Deformation Measurement. J. Sens. 2019, 2019, 5391827. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Guo, Y.; Zhu, J.; Lin, X.; Xin, Y.; Duan, K.; Tang, Q. Large Depth-of-View Portable Three-Dimensional Laser Scanner and Its Segmental Calibration for Robot Vision. Opt. Lasers Eng. 2007, 45, 1077–1087. [Google Scholar] [CrossRef]
- Miks, A.; Novak, J.; Novak, P. Analysis of Imaging for Laser Triangulation Sensors under Scheimpflug Rule. Opt. Express 2013, 21, 18225–18235. [Google Scholar] [CrossRef]
- Brownjohn, J.M.W.; Xu, Y.; Hester, D. Vision-Based Bridge Deformation Monitoring. Front. Built Environ. 2017, 3, 23. [Google Scholar] [CrossRef] [Green Version]
- Duda, A.; Frese, U. Accurate Detection and Localization of Checkerboard Corners for Calibration. 2018. Available online: http://bmvc2018.org/contents/papers/0508.pdf (accessed on 4 May 2022).
- Yoneyama, S.; Ueda, H. Bridge Deflection Measurement Using Digital Image Correlation with Camera Movement Correction. Mater. Trans. 2012, 53, 285–290. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Wang, J.; Mou, X.; Li, X.; Feng, X. Robust and High-Precision Vision System for Deflection Measurement of Crane Girder with Camera Shake Reduction. IEEE Sens. J. 2020, 21, 7478–7489. [Google Scholar] [CrossRef]
- Servotest—Test & Motion Simulation. Available online: Https://www.servotestsystems.com/ (accessed on 4 May 2022).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisitions | With Compensation (mm) | Without Compensation (mm) | Reduction in RMSE (%) | |||
|---|---|---|---|---|---|---|
| x | y | x | y | x | y | |
| d = 50 m, L = 20 m | 0.14 | 0.09 | 3.44 | 2.63 | 96 | 97 |
| d = 50 m, L = 40 m | 0.27 | 0.14 | 1.97 | 3.12 | 86 | 96 |
| d = 50 m, L = 80 m | 0.21 | 0.20 | 2.01 | 7.13 | 90 | 97 |
| d = 80 m, L = 20 m | 0.21 | 0.19 | 1.78 | 4.25 | 88 | 95 |
| d = 80 m, L = 40 m | 0.50 | 0.29 | 1.31 | 3.43 | 62 | 92 |
| d = 80 m, L = 80 m | 0.33 | 0.54 | 2.31 | 8.27 | 86 | 93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, L.; Dai, W.; Zhang, Y. Scheimpflug Camera-Based Technique for Multi-Point Displacement Monitoring of Bridges. Sensors 2022, 22, 4093. https://doi.org/10.3390/s22114093
Xing L, Dai W, Zhang Y. Scheimpflug Camera-Based Technique for Multi-Point Displacement Monitoring of Bridges. Sensors. 2022; 22(11):4093. https://doi.org/10.3390/s22114093
Chicago/Turabian StyleXing, Lei, Wujiao Dai, and Yunsheng Zhang. 2022. "Scheimpflug Camera-Based Technique for Multi-Point Displacement Monitoring of Bridges" Sensors 22, no. 11: 4093. https://doi.org/10.3390/s22114093