
Acoustic Estimation of the Direction of Arrival of an Unmanned Aerial Vehicle Based on Frequency Tracking in the Time-Frequency Plane



Abstract
:1. Introduction
2. Localization Method and Simulation Parameters
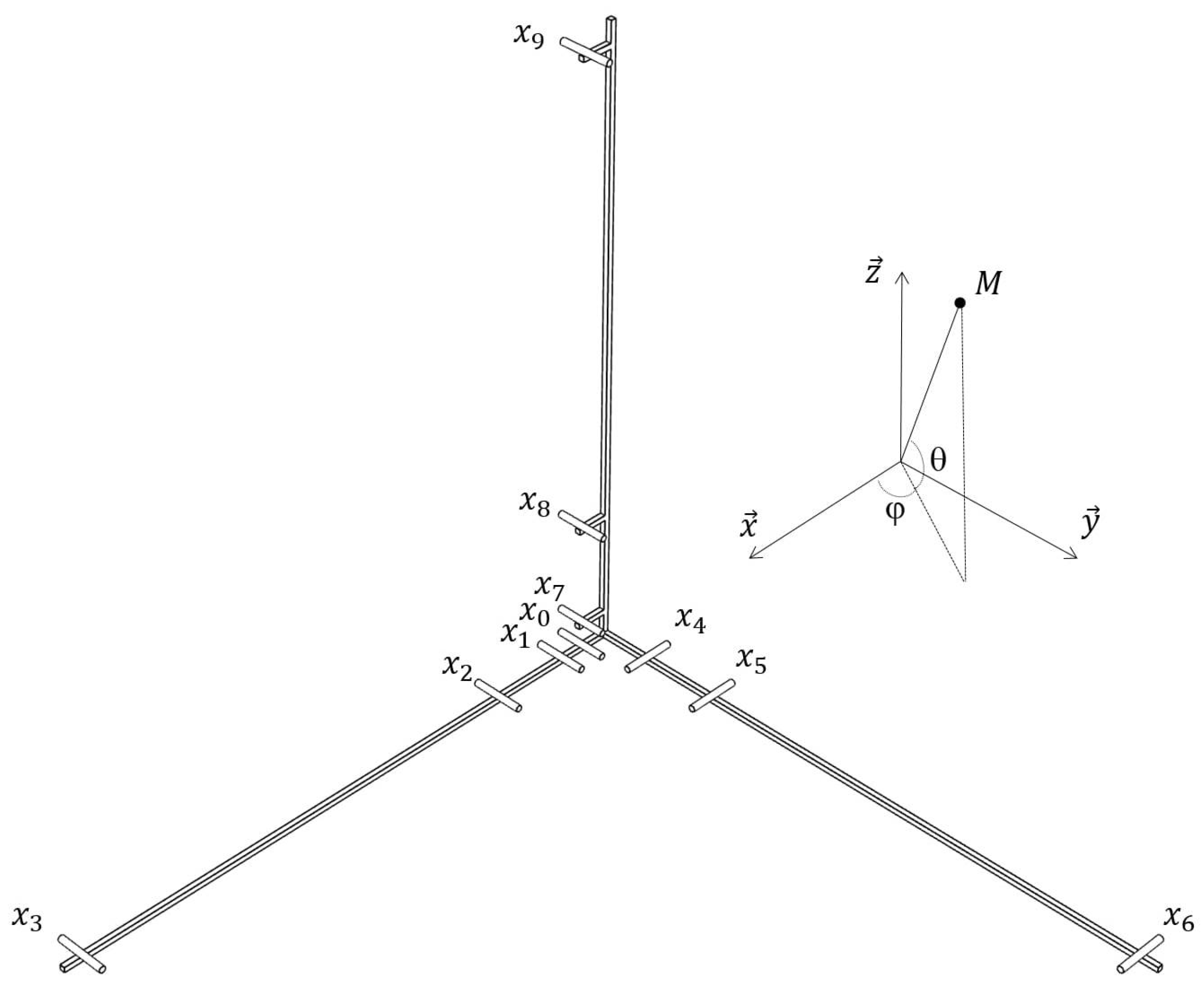
2.1. Delay and Sum Beamforming—Array Geometry
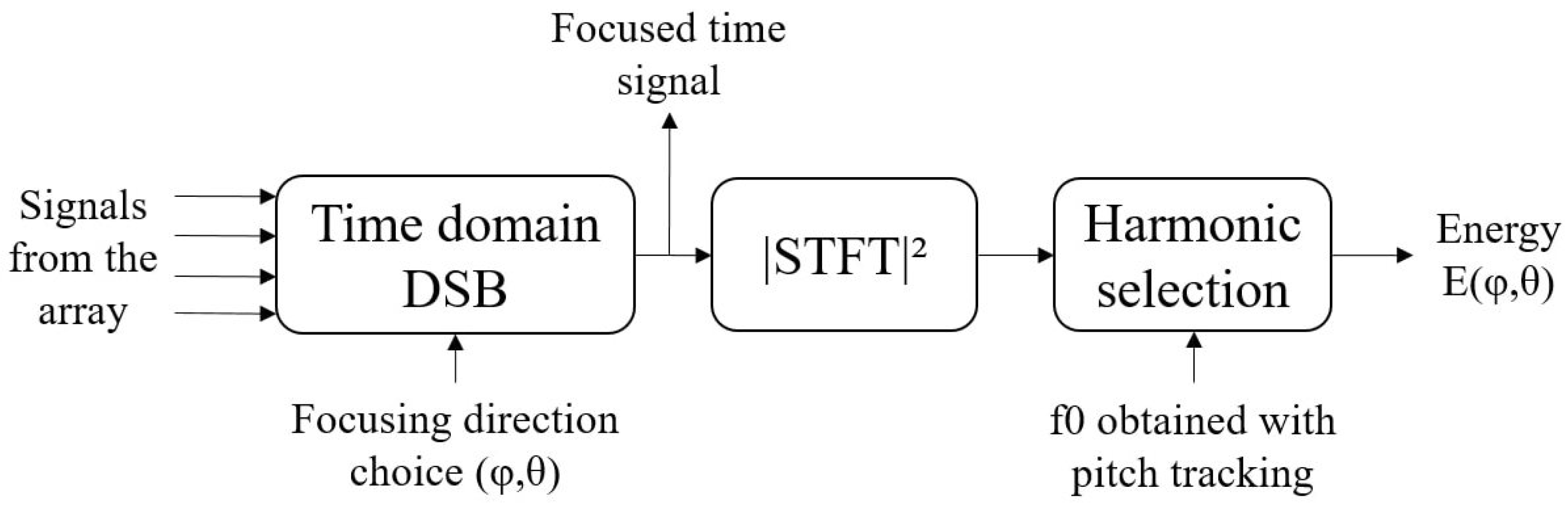
2.2. Description of the Proposed Approach
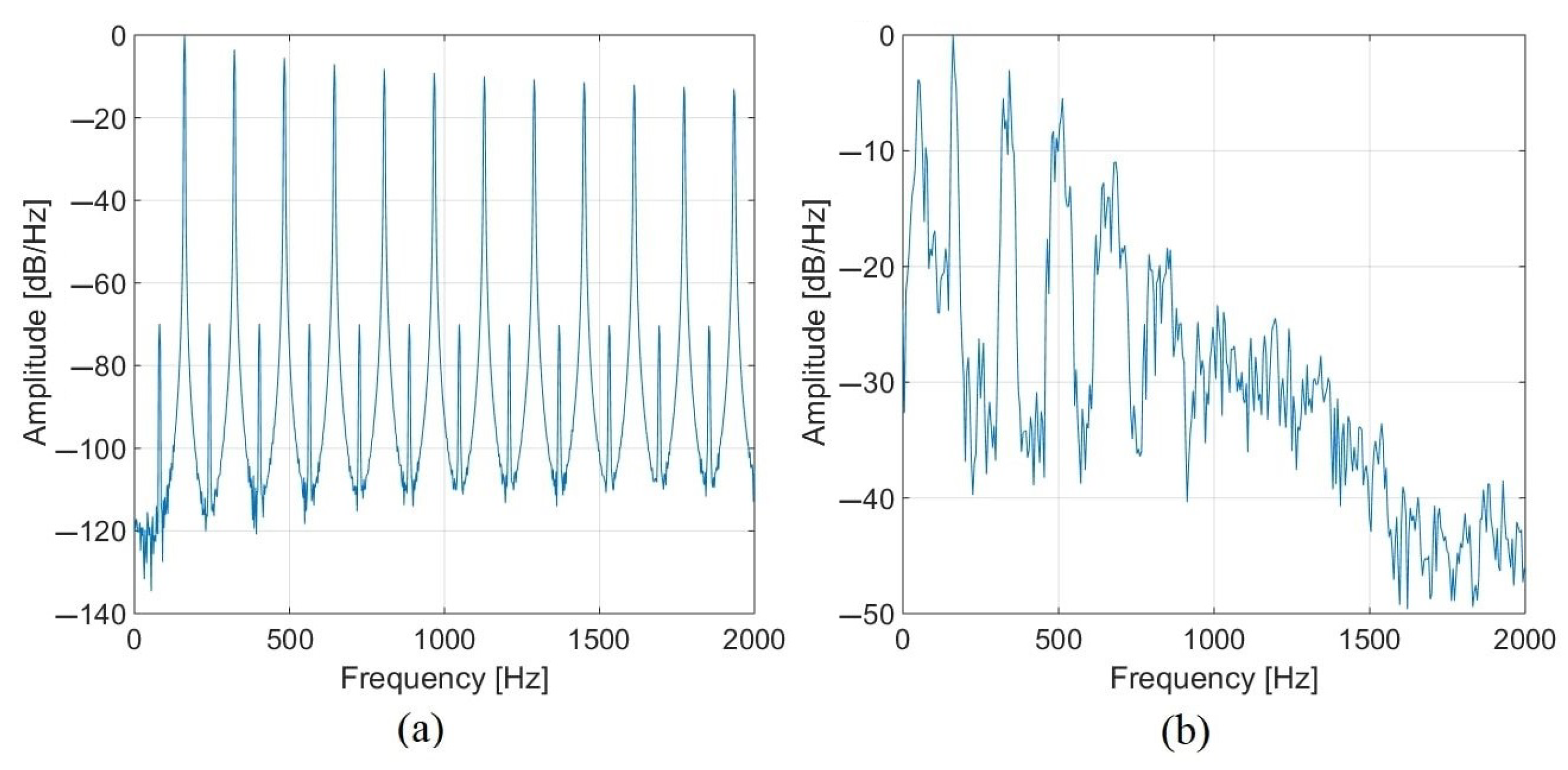
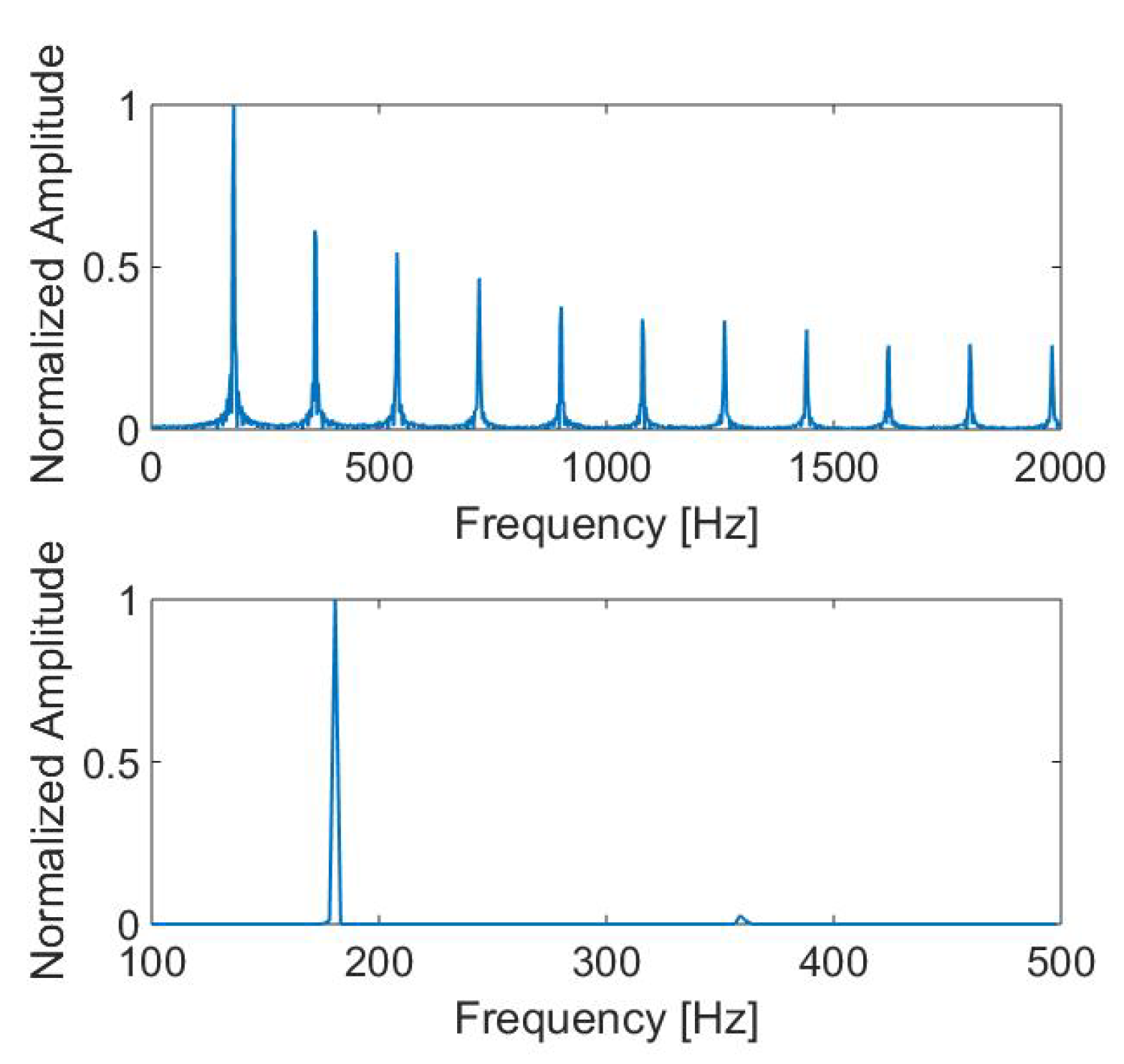
2.3. Simulation of a Drone Signal
3. Simulation Results in the Static Case
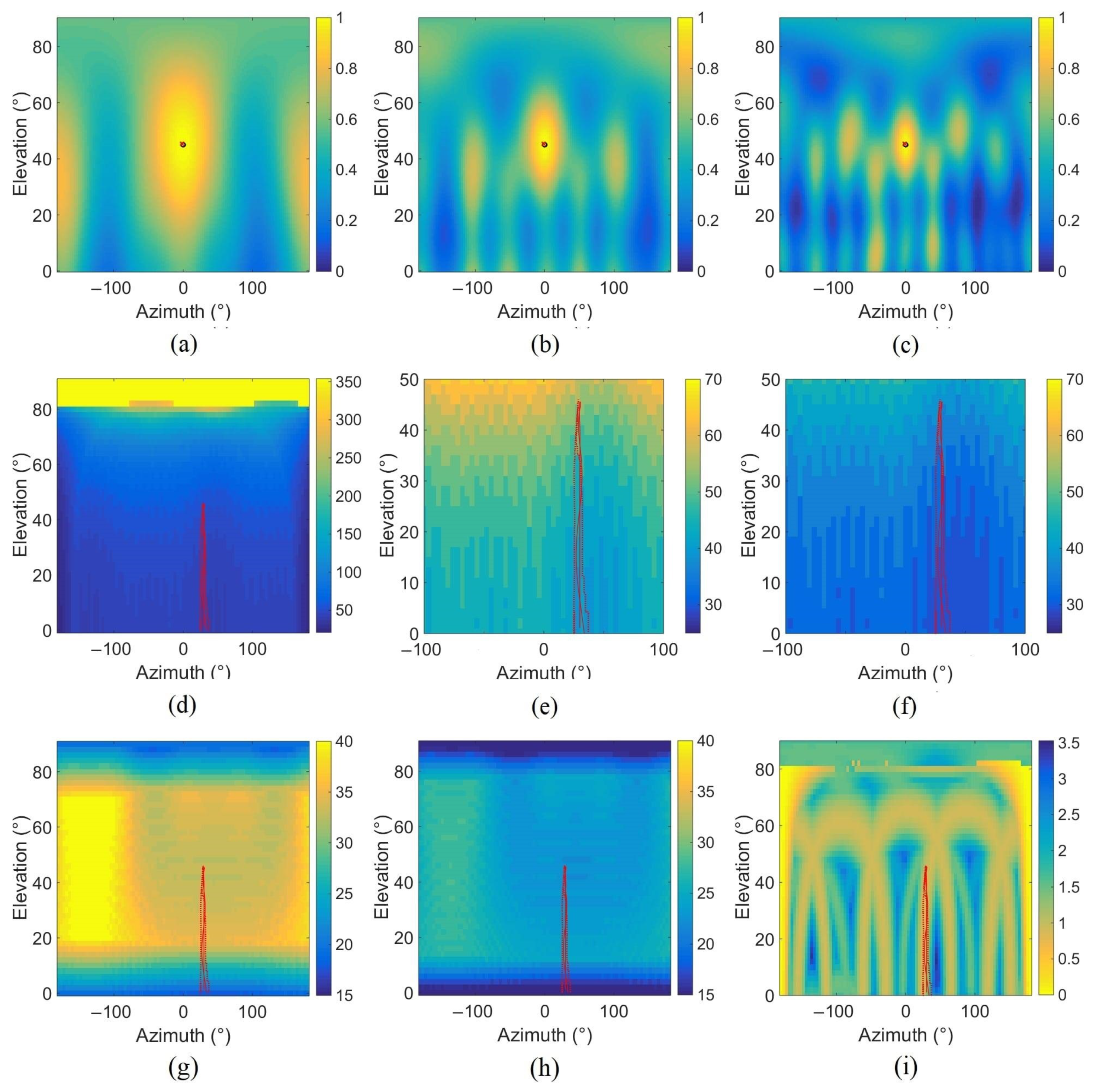
3.1. Directivity Pattern of the Designed Antenna
3.2. Simulations with One Source
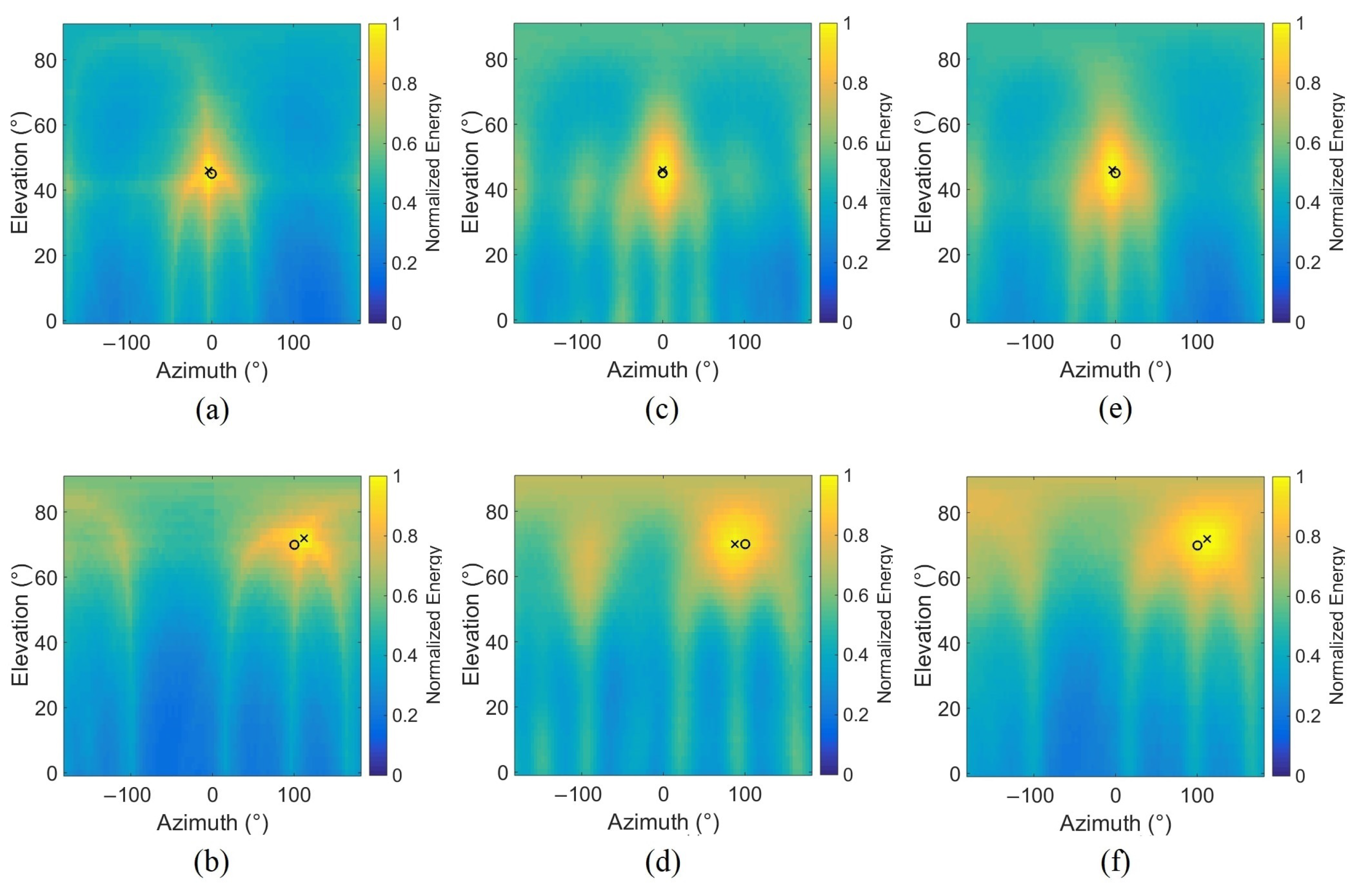
3.3. Simulation with Two Sources
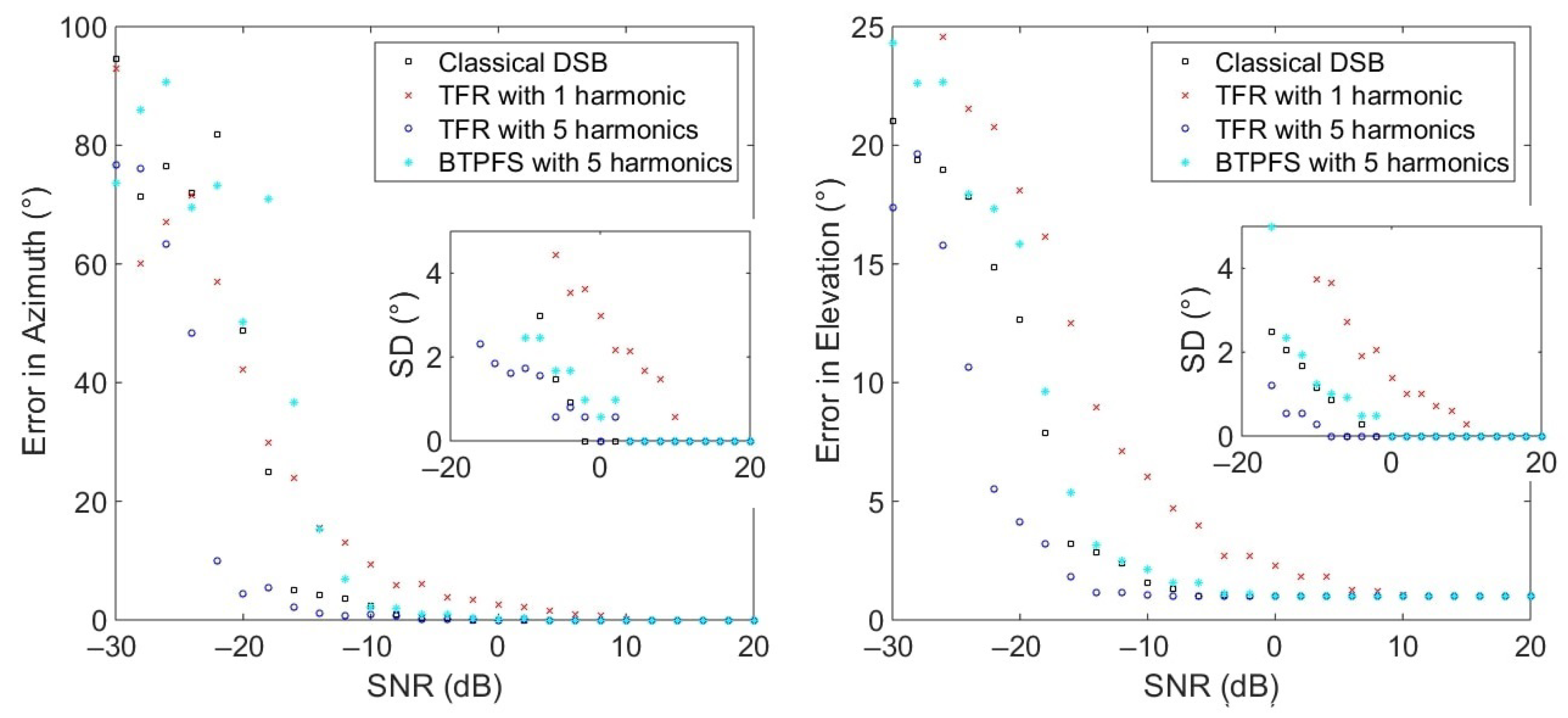
3.4. Performance Evaluation
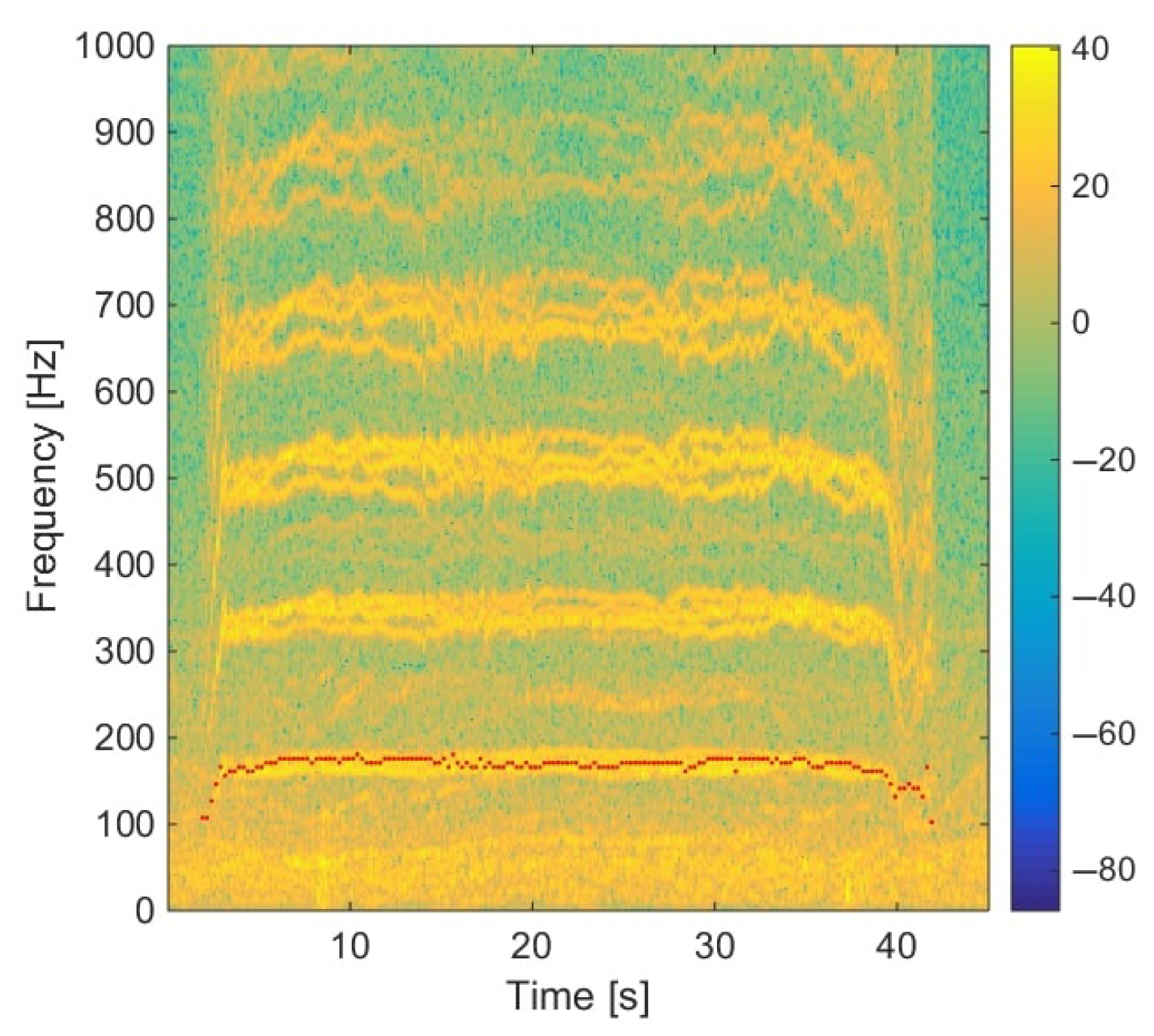
4. Pitch Tracking and Frequency Bandwidth
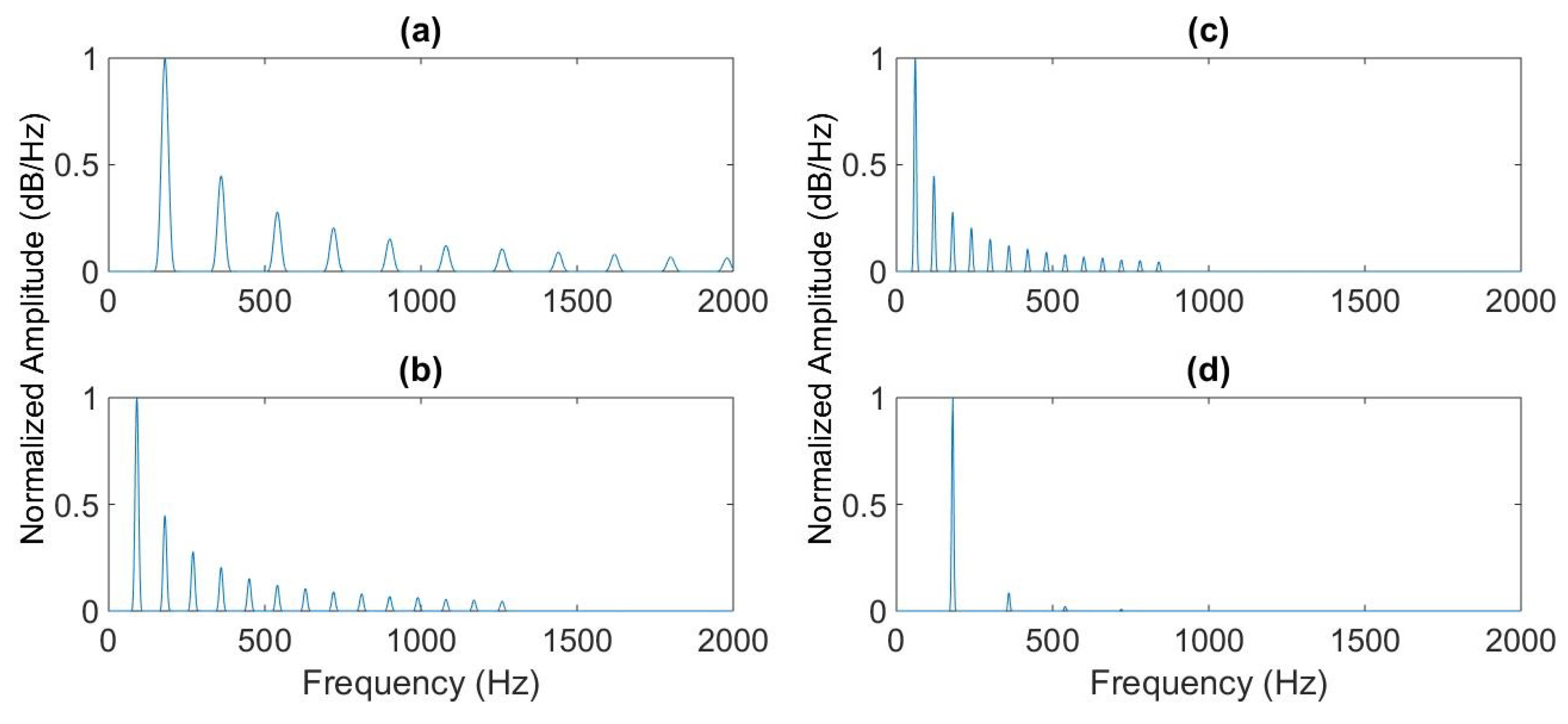
4.1. Harmonic Product Spectrum
4.2. Spectral Harmonic Correlation
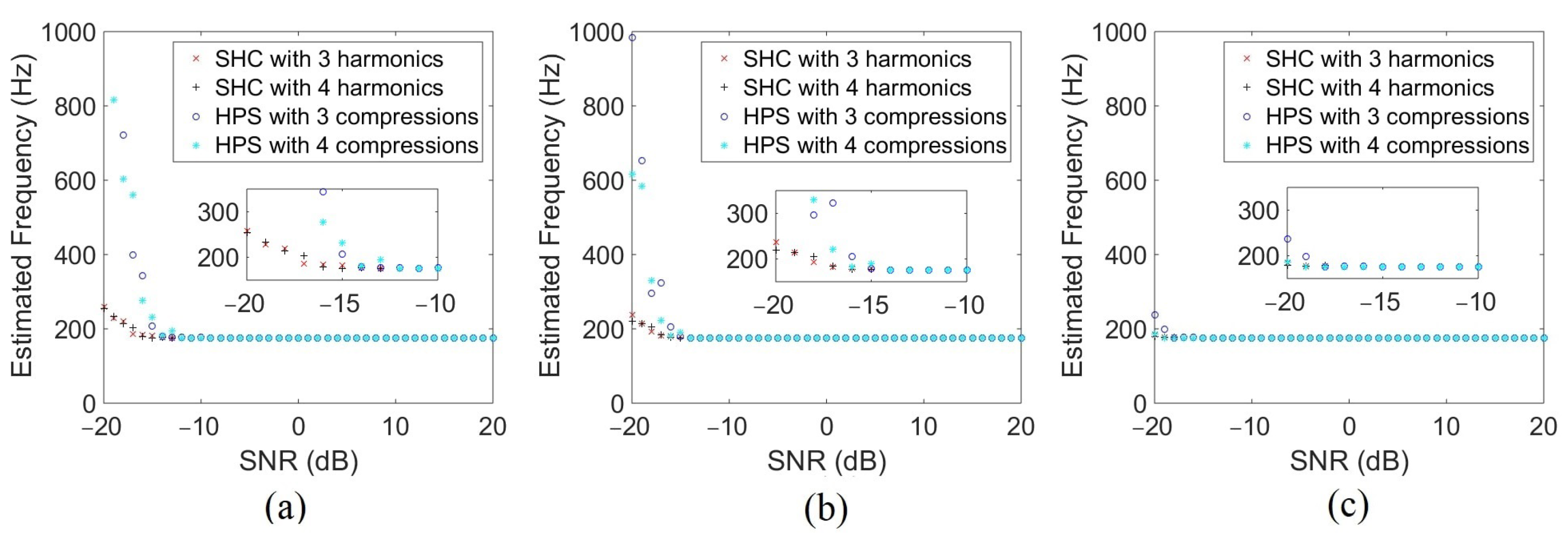
4.3. Performance Evaluation
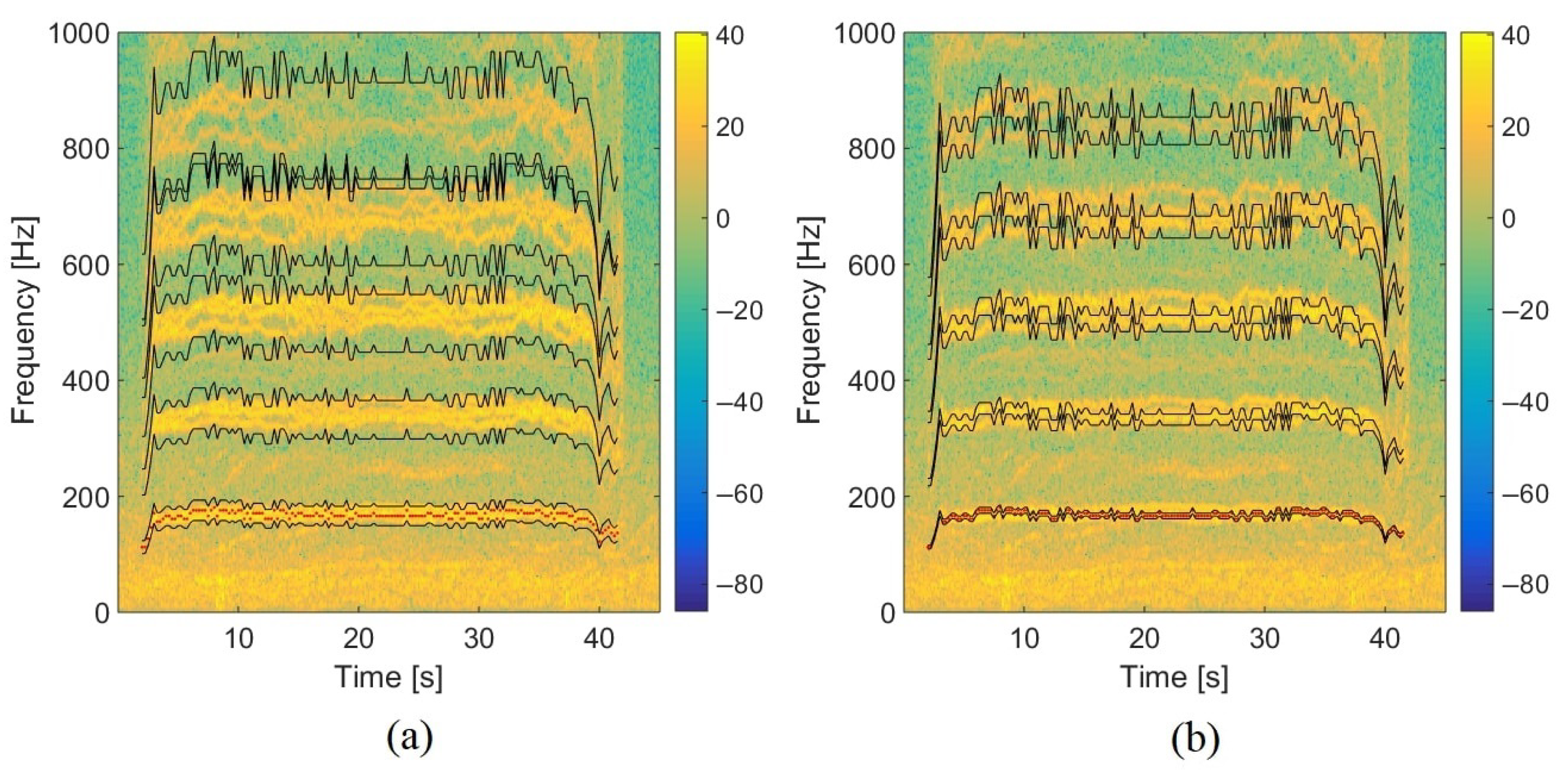
4.4. Frequency Bandwidth around the Tracked Frequency
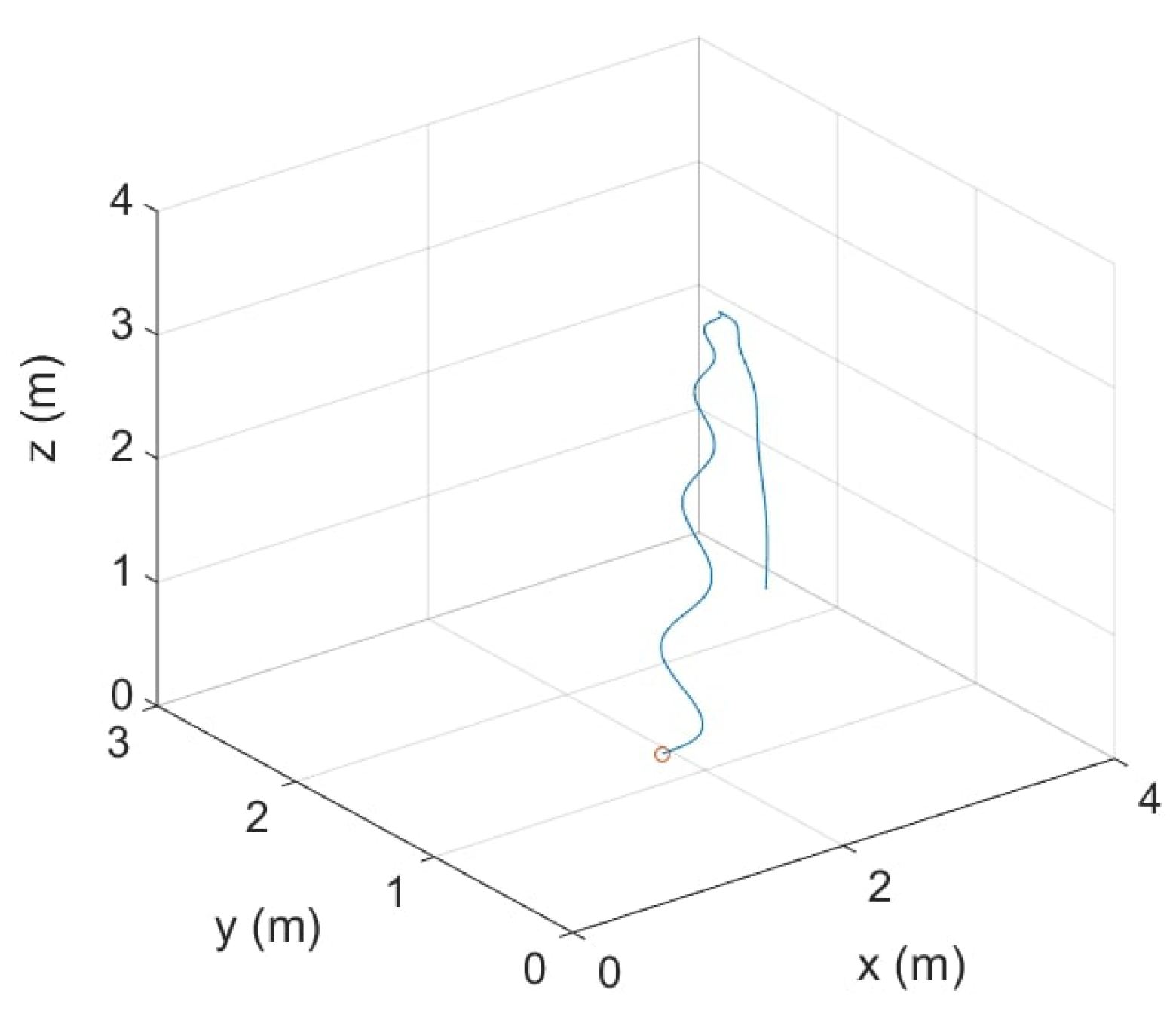
5. Localization of a Moving Source: Simulation and Experiment
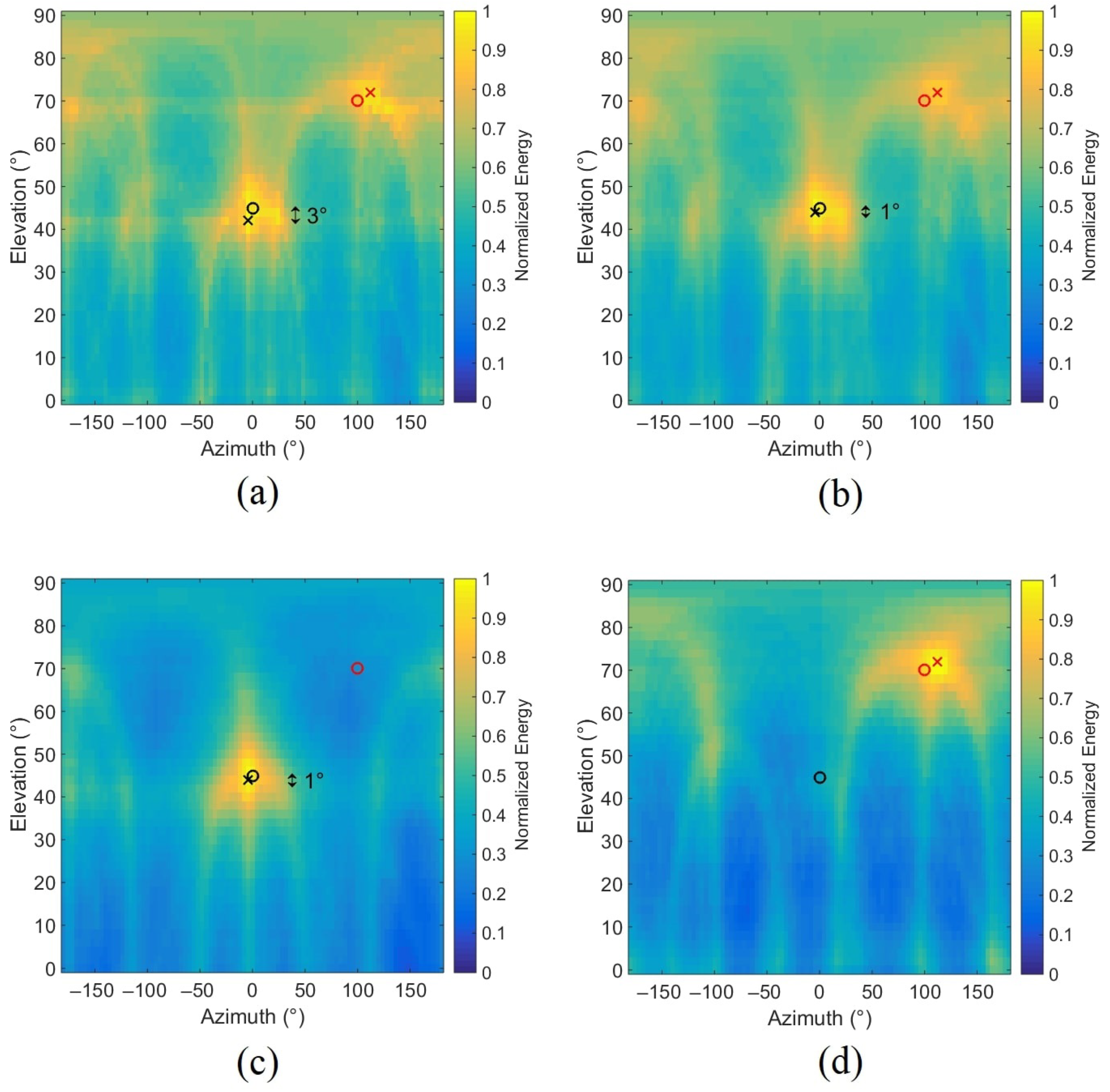
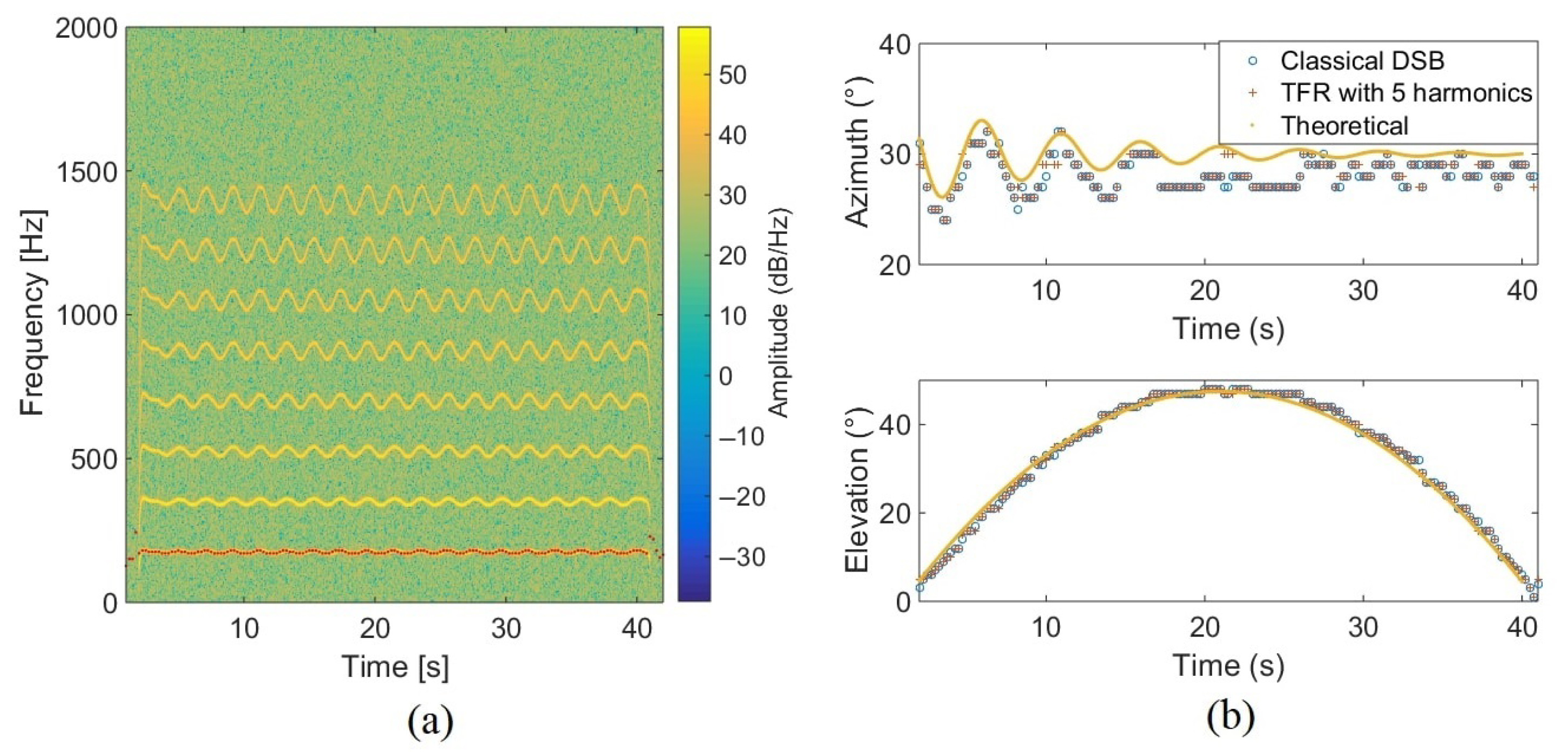
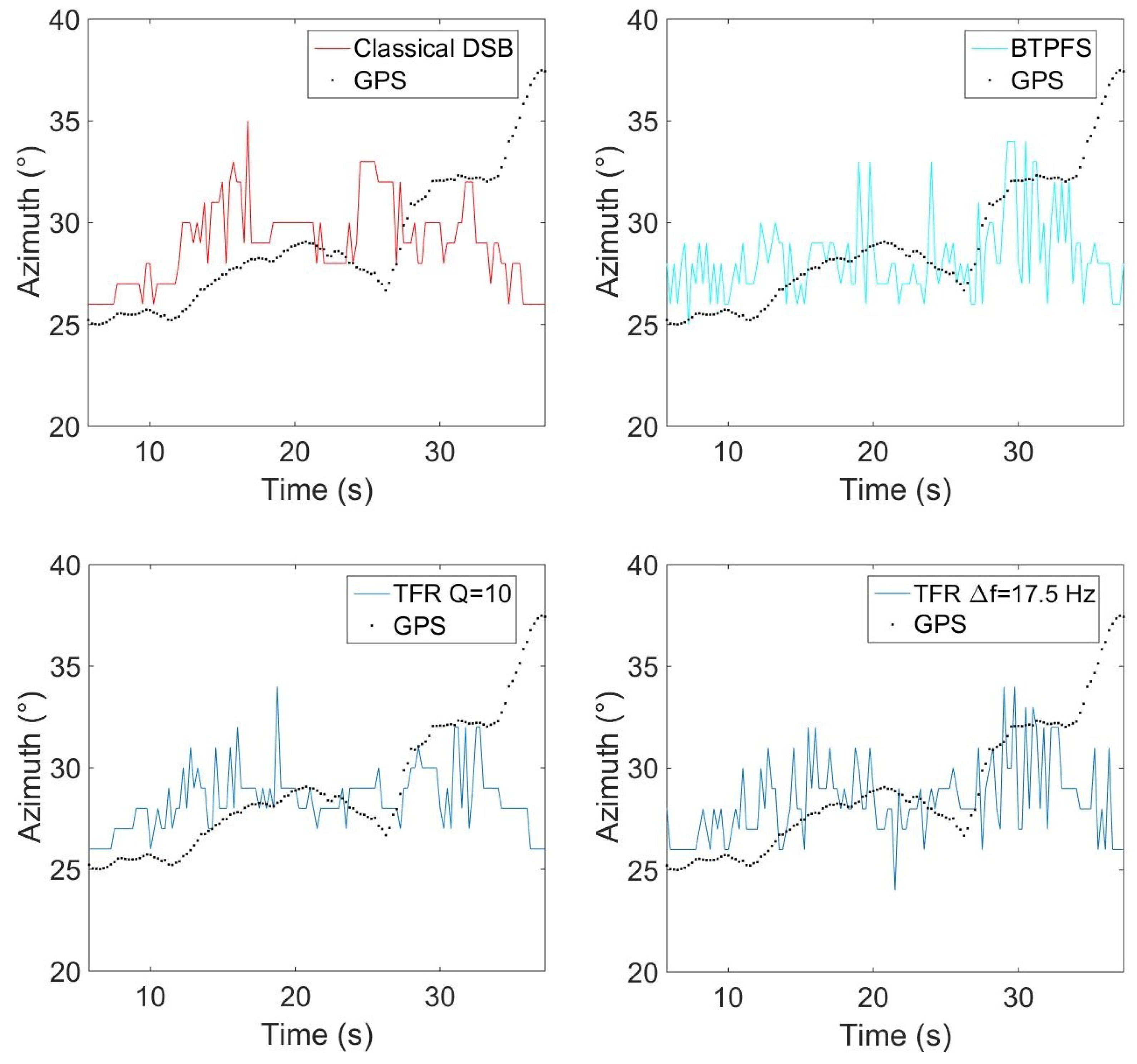
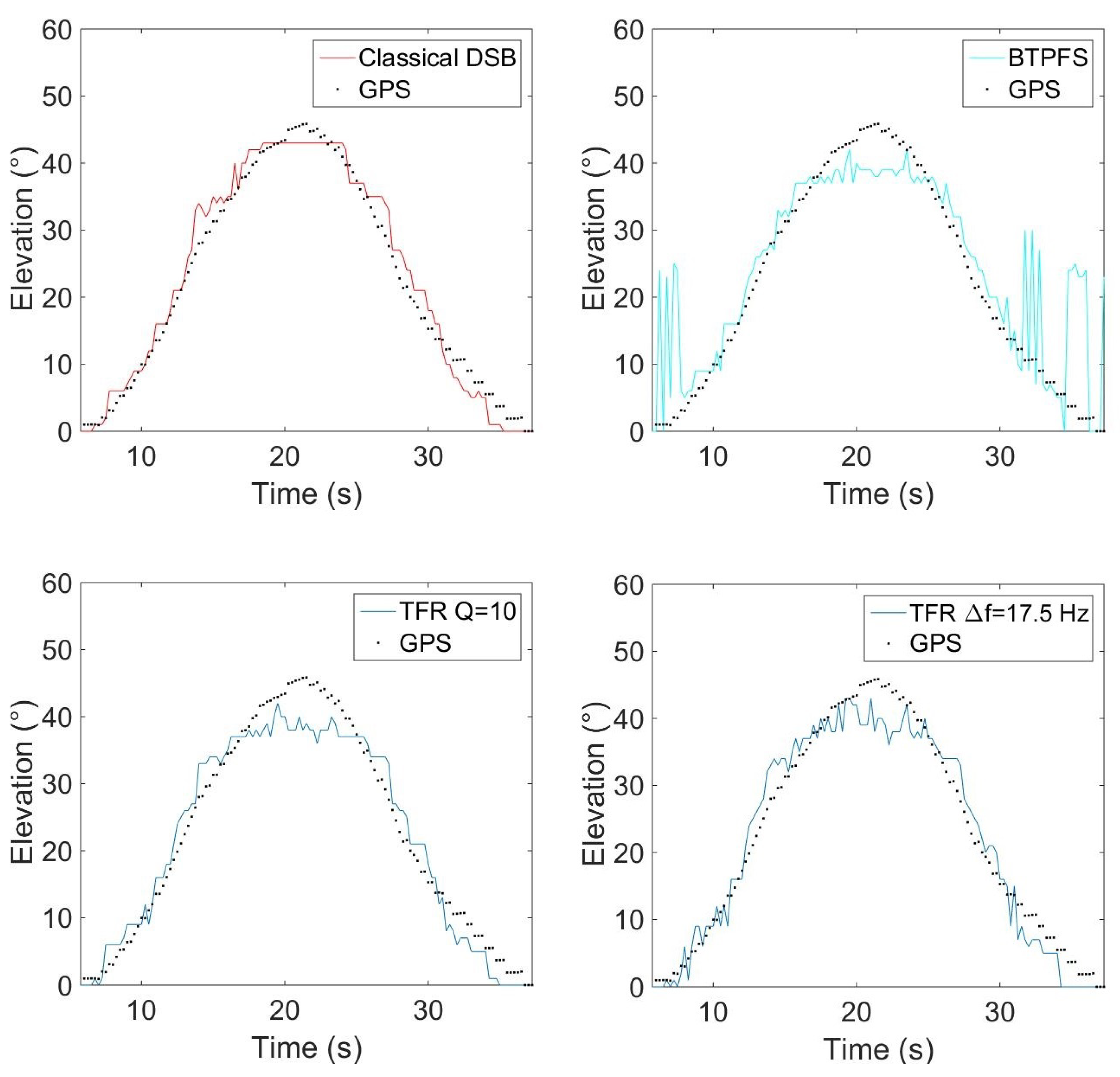
5.1. Classical DSB versus TFR Approach for Source Localization: Simulation
5.2. Influence of the Frequency Bandwidth in the TFR on Localization: Moving Drone
6. Conclusions and Perspectives
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Solodov, A.; Williams, A.; Al Hanaei, S.; Goddard, B. Analyzing the threat of unmanned aerial vehicles (UAV) to nuclear facilities. Secur. J. 2018, 31, 305–324. [Google Scholar] [CrossRef]
- Military Technical Academy; Mototolea, D. A Study on the Methods and Technologies Used for Detection, Localization, and Tracking of LSS UASs. J. Mil. Technol. 2018, 1, 11–16. [Google Scholar] [CrossRef]
- Lykou, G.; Moustakas, D.; Gritzalis, D. Defending Airports from UAS: A Survey on Cyber-Attacks and Counter-Drone Sensing Technologies. Sensors 2020, 20, 3537. [Google Scholar] [CrossRef]
- Ramamonjy, A. Développement de Nouvelles Méthodes de Classification/Localisation de Signaux Acoustiques Appliquées aux Véhicules Aériens. (Development of New Classification/Localization Methods Applied to Aerian Vehicle Acoustical Signals). Ph.D. Thesis, Conservatoire National des Arts et Métiers, Paris, France, 2019. [Google Scholar]
- Baron, V.; Bouley, S.; Muschinowski, M.; Mars, J.; Nicolas, B. Localisation et identification acoustique de drones par mesures d’antennerie et apprentissage supervisé (Acoustic Localization and identification with antennas and supervised learning). In Proceedings of the GRETSI 2019—XXVIIème Colloque Francophone de Traitement du Signal et des Images, Lille, France, 26–29 August 2019. [Google Scholar]
- Sedunov, A.; Haddad, D.; Salloum, H.; Sutin, A.; Sedunov, N.; Yakubovskiy, A. Stevens Drone Detection Acoustic System and Experiments in Acoustics UAV Tracking. In Proceedings of the 2019 IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 5–6 November 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Van Veen, B.; Buckley, K. Beamforming: A versatile approach to spatial filtering. IEEE ASSP Mag. 1988, 5, 4–24. [Google Scholar] [CrossRef]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef] [Green Version]
- Frikel, M.; Bourennane, S. High-resolution methods without eigendecomposition for locating the acoustic sources. Appl. Acoust. 1997, 52, 139–154. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propagat. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, T. L1 generalized inverse beam-forming algorithm resolving coherent/incoherent, distributed and multipole sources. J. Sound Vib. 2011, 330, 5835–5851. [Google Scholar] [CrossRef]
- Van Lancker, E. Acoustic Goniometry: A Spatio-Temporal Approach. Ph.D. Thesis, Ecole Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2001. [Google Scholar]
- Lardies, J.; Ma, H.; Berthillier, M. Source localization using a sparse representation of sensor measurements. In Proceedings of the Acoustics 2012 Conference, Nantes, France, 23 April 2012. [Google Scholar]
- Zou, Y.X.; Li, B.; Ritz, C.H. Multi-Source DOA Estimation Using an Acoustic Vector Sensor Array Under a Spatial Sparse Representation Framework. Circuits Syst. Signal Process. 2016, 35, 993–1020. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Cabell, R.; McSwain, R.; Grosveld, F. Measured Noise from Small Unmanned Aerial Vehicles. In Inter-Noise and Noise-Con Congress and Conference Proceedings; Institute of Noise Control Engineering: West Lafayette, IN, USA, 2016; Volume 252, pp. 345–354. [Google Scholar]
- Kloet, N.; Watkins, S.; Clothier, R. Acoustic signature measurement of small multi-rotor unmanned aircraft systems. Int. J. Micro Air Veh. 2017, 9, 3–14. [Google Scholar] [CrossRef]
- Djurek, I.; Petosic, A.; Grubesa, S.; Suhanek, M. Analysis of a Quadcopter’s Acoustic Signature in Different Flight Regimes. IEEE Access 2020, 8, 10662–10670. [Google Scholar] [CrossRef]
- Blanchard, T. Acoustic localization and tracking of a multi-rotor unmanned aerial vehicle using an array with few microphones. J. Acoust. Soc. Am. 2020, 148, 1456–1467. [Google Scholar] [CrossRef] [PubMed]
- Yujie, G.; Leshem, A. Robust Adaptive Beamforming Based on Interference Covariance Matrix Reconstruction and Steering Vector Estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar] [CrossRef]
- Chen, P.; Yang, Y.; Wang, Y.; Ma, Y. Robust Adaptive Beamforming with Sensor Position Errors Using Weighted Subspace Fitting-Based Covariance Matrix Reconstruction. Sensors 2018, 18, 1476. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schroeder, M.R. Period Histogram and Product Spectrum: New Methods for Fundamental-Frequency Measurement. J. Acoust. Soc. Am. 1968, 43, 829–834. [Google Scholar] [CrossRef]
- Shi, W.; Arabadjis, G.; Bishop, B.; Hill, P.; Plasse, R.; Yoder, J. Detecting, tracking, and identifying airborne threats with netted sensor fence. In Sensor Fusion; Thomas, C., Ed.; IntechOpen: Rijeka, Croatia, 2011. [Google Scholar] [CrossRef] [Green Version]
- Srour, N.; James, R. Remote Netted Acoustic Detection System: Final Report; Technical Report ARL-TR-706; US Army Research Laboratory: Adelphi, MD, USA, 1995. [Google Scholar]
- Pham, T.; Sadler, B.; Fong, M.; Messer, D. High-resolution acoustic direction-finding algorithm to detect and track ground vehicles. In Ward Winning Papers, Proceedings of the Twentieth Army Science Conference, Norfolk, VI, USA, 24–27 June 1996; World Scientific: Singapore; Hackensack, NJ, USA; London, UK; Hong Kong, China, 1997; p. 16. [Google Scholar]
- Zahorian, S.A.; Hu, H. A spectral/temporal method for robust fundamental frequency tracking. J. Acoust. Soc. Am. 2008, 123, 4559–4571. [Google Scholar] [CrossRef]
- Goto, M. A robust predominant-F0 estimation method for real-time detection of melody and bass lines in CD recordings. In Proceedings of the 2000 IEEE International Conference on Acoustics, Speech, and Signal Processing (Cat. No.00CH37100), Istanbul, Turkey, 5–9 June 2000; Volume 2, pp. II757–II760. [Google Scholar] [CrossRef] [Green Version]
- Grubeša, S.; Stamać, J.; Suhanek, M.; Petošić, A. Use of Genetic Algorithms for Design an FPGA-Integrated Acoustic Camera. Sensors 2022, 22, 2851. [Google Scholar] [CrossRef]
- Le Courtois, F.; Thomas, J.H.; Poisson, F.; Pascal, J.C. Genetic optimisation of a plane array geometry for beamforming. Application to source localisation in a high speed train. J. Sound Vib. 2016, 371, 78–93. [Google Scholar] [CrossRef]
- Aldeman, M.R. A hybrid spiral microphone array design for performance and portability. Appl. Acoust. 2020, 170, 107512. [Google Scholar] [CrossRef]
- Tu, Q.; Chen, H. Array configuration optimization of first-order steerable differential arrays with minimum number of microphones. J. Acoust. Soc. Am. 2020, 148, 1732–1747. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Kirubarajan, T.; Xiao, Q. Arbitrary Microphone Array Optimization Method Based on TDOA for Specific Localization Scenarios. Sensors 2019, 19, 4326. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oppenheim, A.V.; Schafer, R.W. Discrete-Time Signal Processing; Prentice Hall Signal Processing Series; Prentice-Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Blanchard, T. Caractérisation de Drones en vue de leur Localisation et de leur Suivi à Partir d’une Antenne de Microphones (Characterization of Drones for Their Localization and Their Tracking from a Microphone Array). Ph.D. Thesis, Le Mans Université, Le Mans, France, 2019. [Google Scholar]
- Bougaiov, N.; Danik, Y. Hough Transform for UAV’s Acoustic Signals Detection. Adv. Sci. 2015, 6, 65–68. [Google Scholar] [CrossRef]
- McCowan, I. Robust Speech Recognition Using Microphone Arrays. Ph.D. Thesis, Queensland University of Technology, Brisbane City, Australia, 2001. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Duration (s) | (Hz) | (Hz) | |||
|---|---|---|---|---|---|
| (f = 175 Hz) | (f = 350 Hz) | ||||
| 16,384 | 0.8 | 1.22 | 3 | 58 | 116 |
| 8192 | 0.4 | 2.44 | 5 | 35 | 70 |
| 4096 | 0.2 | 4.88 | 10 | 17.5 | 35 |
| 2048 | 0.1 | 9.76 | 20 | 8.75 | 17.5 |
| 1024 | 0.05 | 19.53 | 40 | 4.37 | 8.75 |
| Azimuth (°) | Elevation (°) | |||
|---|---|---|---|---|
| Simulated Trajectory | ||||
| Classical DSB | 1.8 | 0.8 | 1.1 | 0.7 |
| TFR with 5 harmonics | 1.7 | 0.8 | 1.1 | 0.7 |
| Experimental Trajectory | ||||
| Classical DSB | 2.9 | 2.6 | 2 | 1.5 |
| TFR with 5 harmonics (Q = 10) | 2.3 | 2.5 | 2.8 | 1.9 |
| TFR with 5 harmonics (f = 17.5 Hz) | 2.3 | 2.5 | 2.6 | 1.9 |
| BTPFS | 2.5 | 2.4 | 4.7 | 6.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Itare, N.; Thomas, J.-H.; Raoof, K.; Blanchard, T. Acoustic Estimation of the Direction of Arrival of an Unmanned Aerial Vehicle Based on Frequency Tracking in the Time-Frequency Plane. Sensors 2022, 22, 4021. https://doi.org/10.3390/s22114021
Itare N, Thomas J-H, Raoof K, Blanchard T. Acoustic Estimation of the Direction of Arrival of an Unmanned Aerial Vehicle Based on Frequency Tracking in the Time-Frequency Plane. Sensors. 2022; 22(11):4021. https://doi.org/10.3390/s22114021
Chicago/Turabian StyleItare, Nathan, Jean-Hugh Thomas, Kosai Raoof, and Torea Blanchard. 2022. "Acoustic Estimation of the Direction of Arrival of an Unmanned Aerial Vehicle Based on Frequency Tracking in the Time-Frequency Plane" Sensors 22, no. 11: 4021. https://doi.org/10.3390/s22114021