
A New Self-Calibration and Compensation Method for Installation Errors of Uniaxial Rotation Module Inertial Navigation System


Abstract
:1. Introduction
2. Configuration of URMINS and Installation Error Modeling
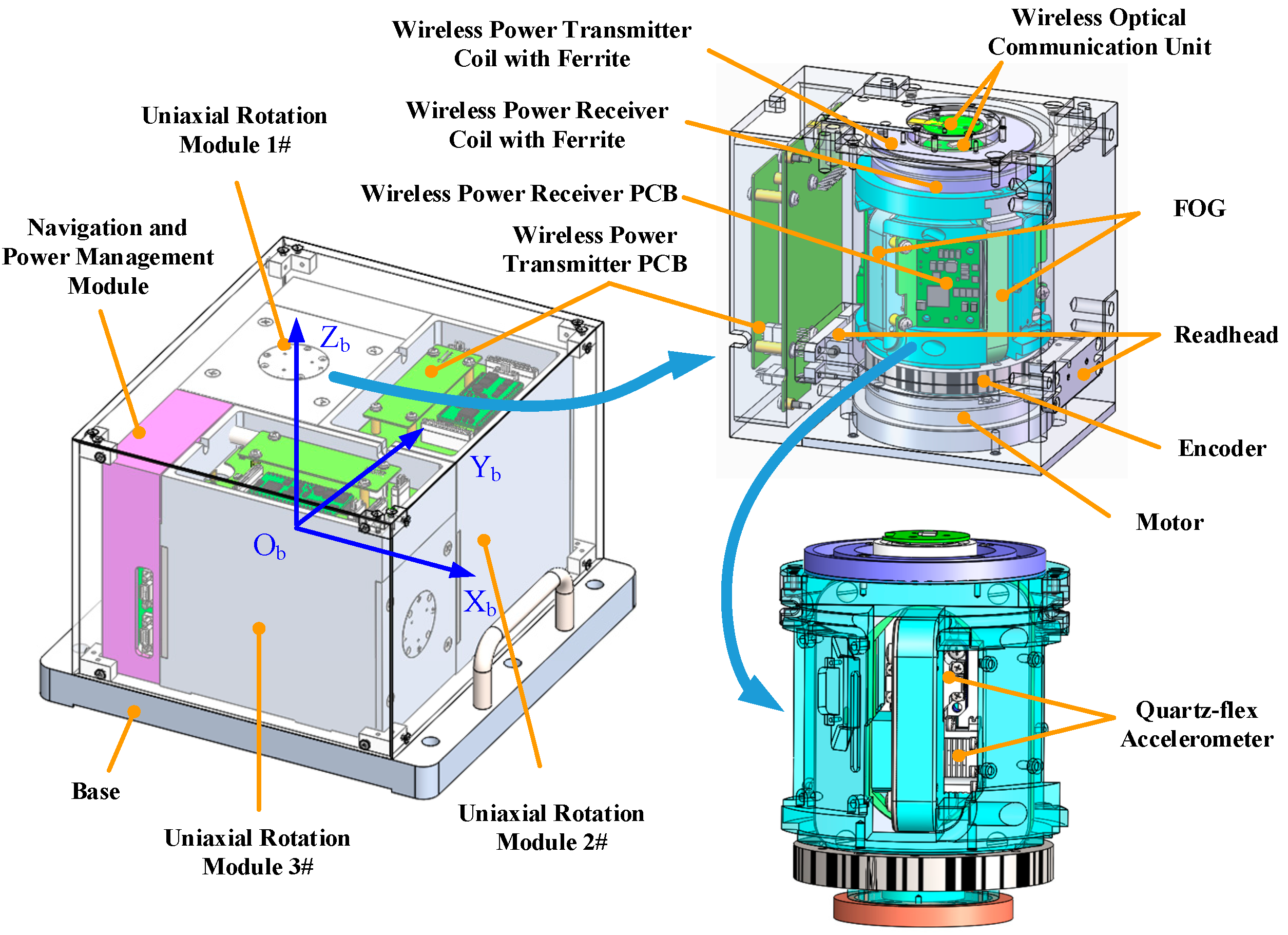
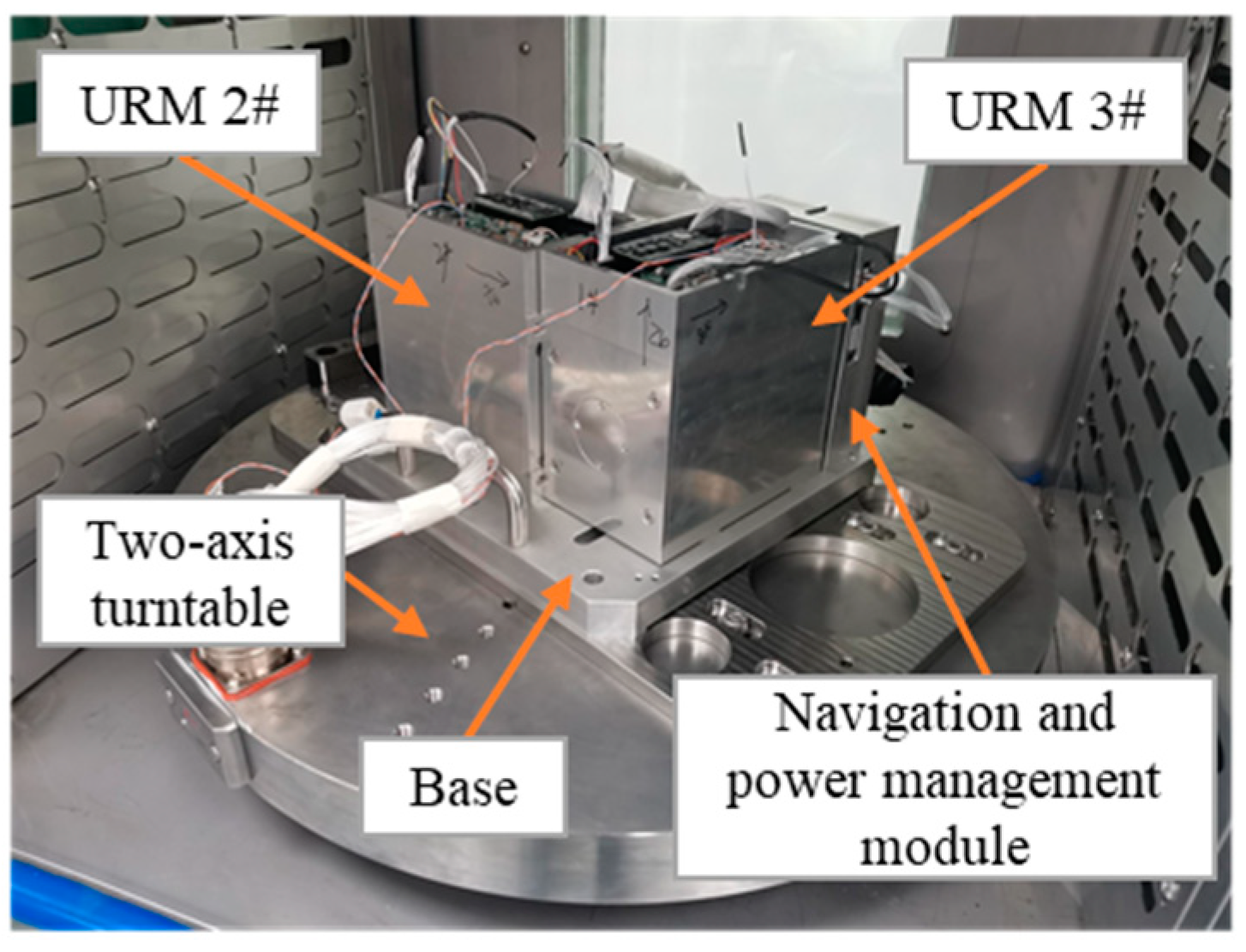
2.1. Configuration of URMINS
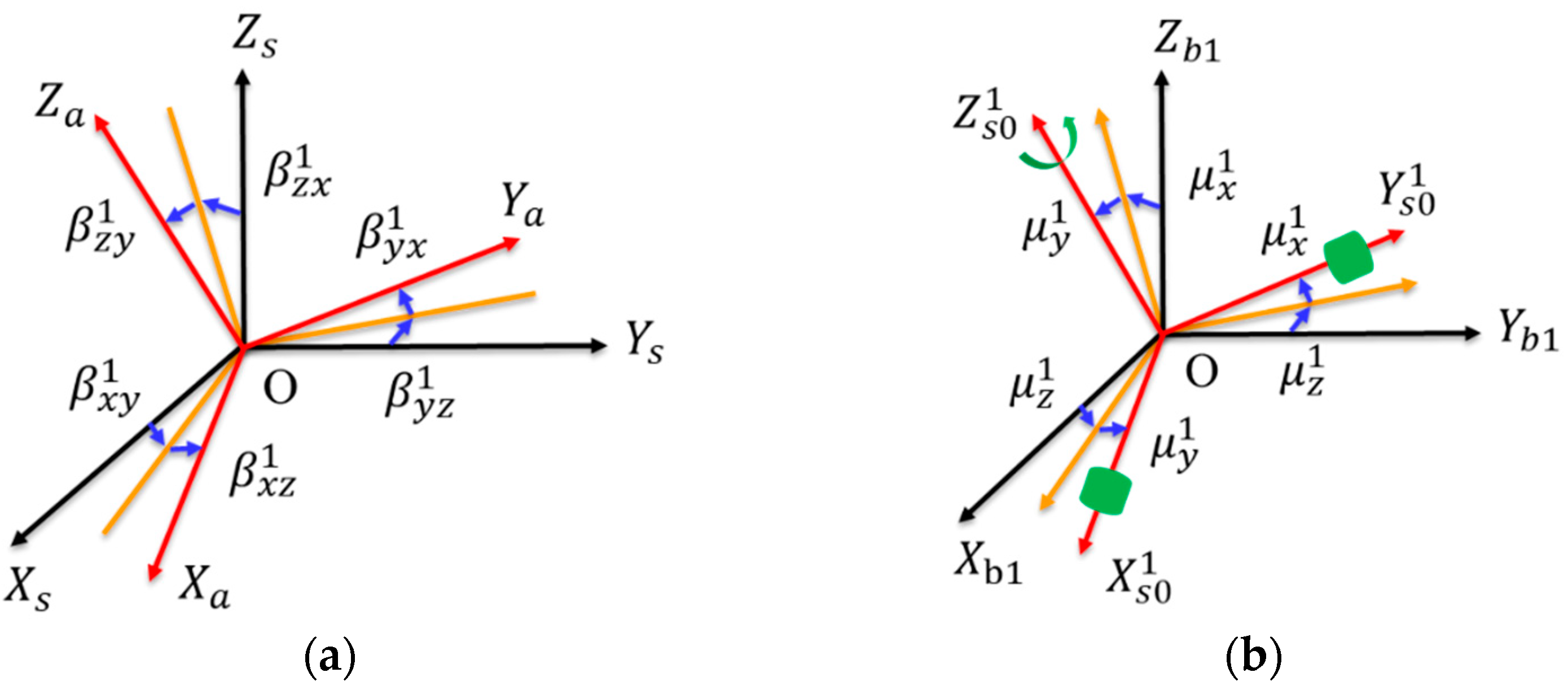
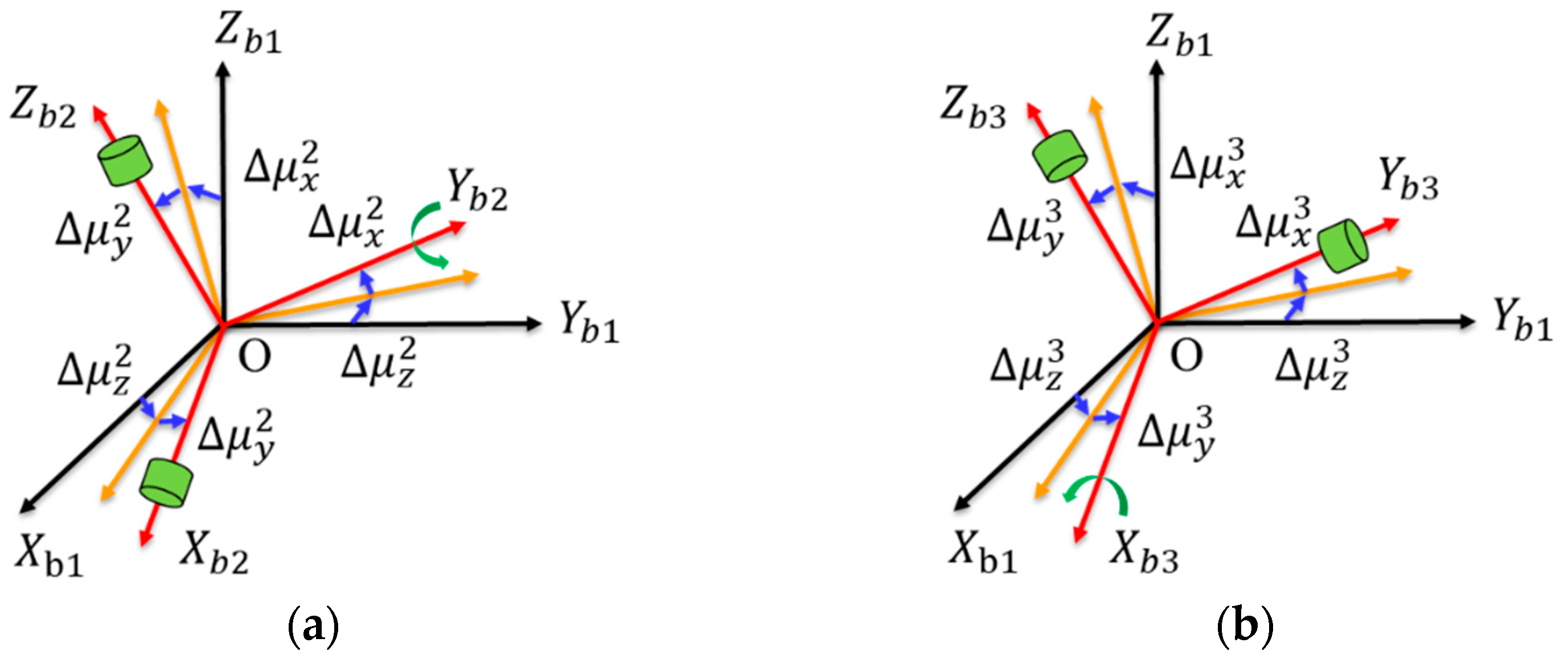
2.2. The Installation Error Modeling and Analysis
3. Self-Calibration and Compensation Scheme
3.1. Self-Calibration Scheme
3.1.1. Design of Kalman Filter
3.1.2. Measurement Equation
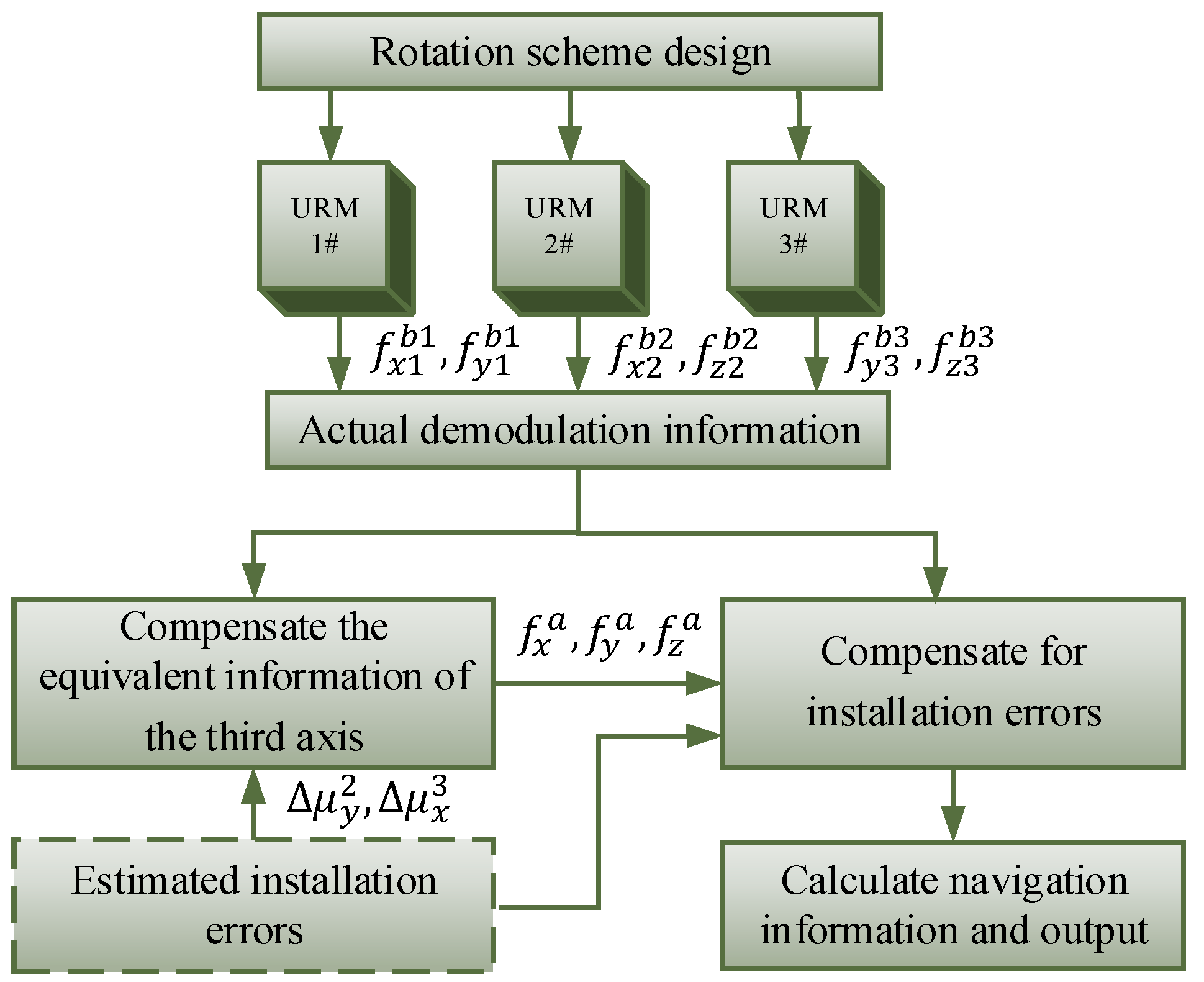
3.2. Compensation Scheme
4. Simulation Results and Analysis
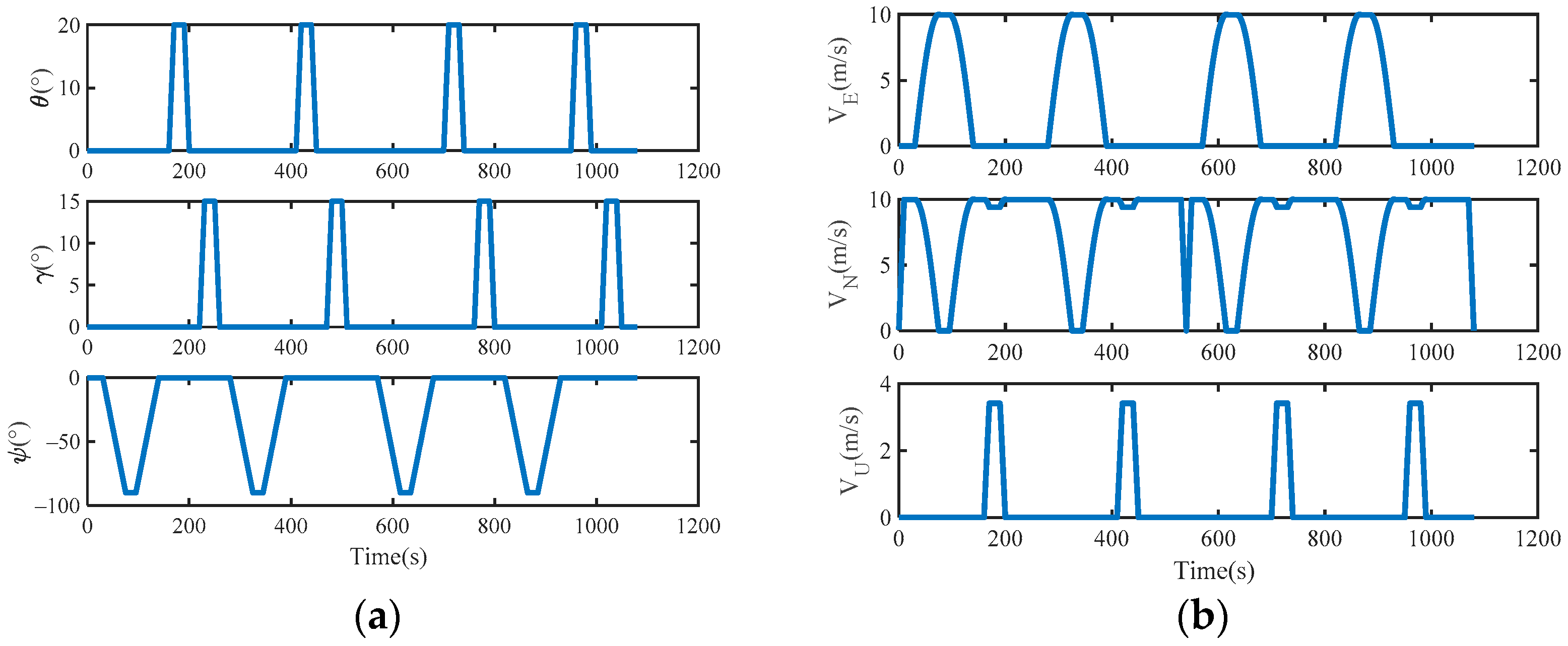
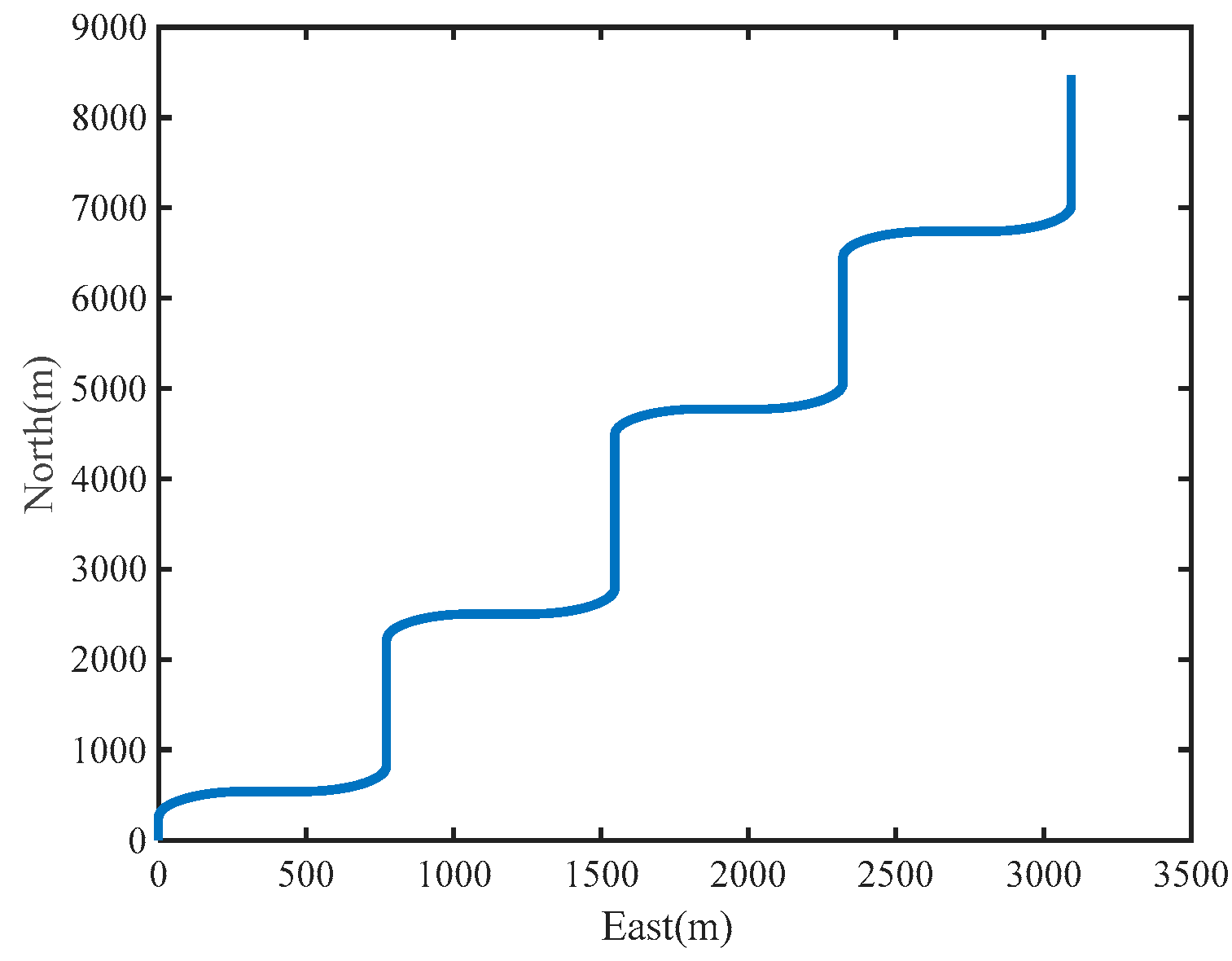
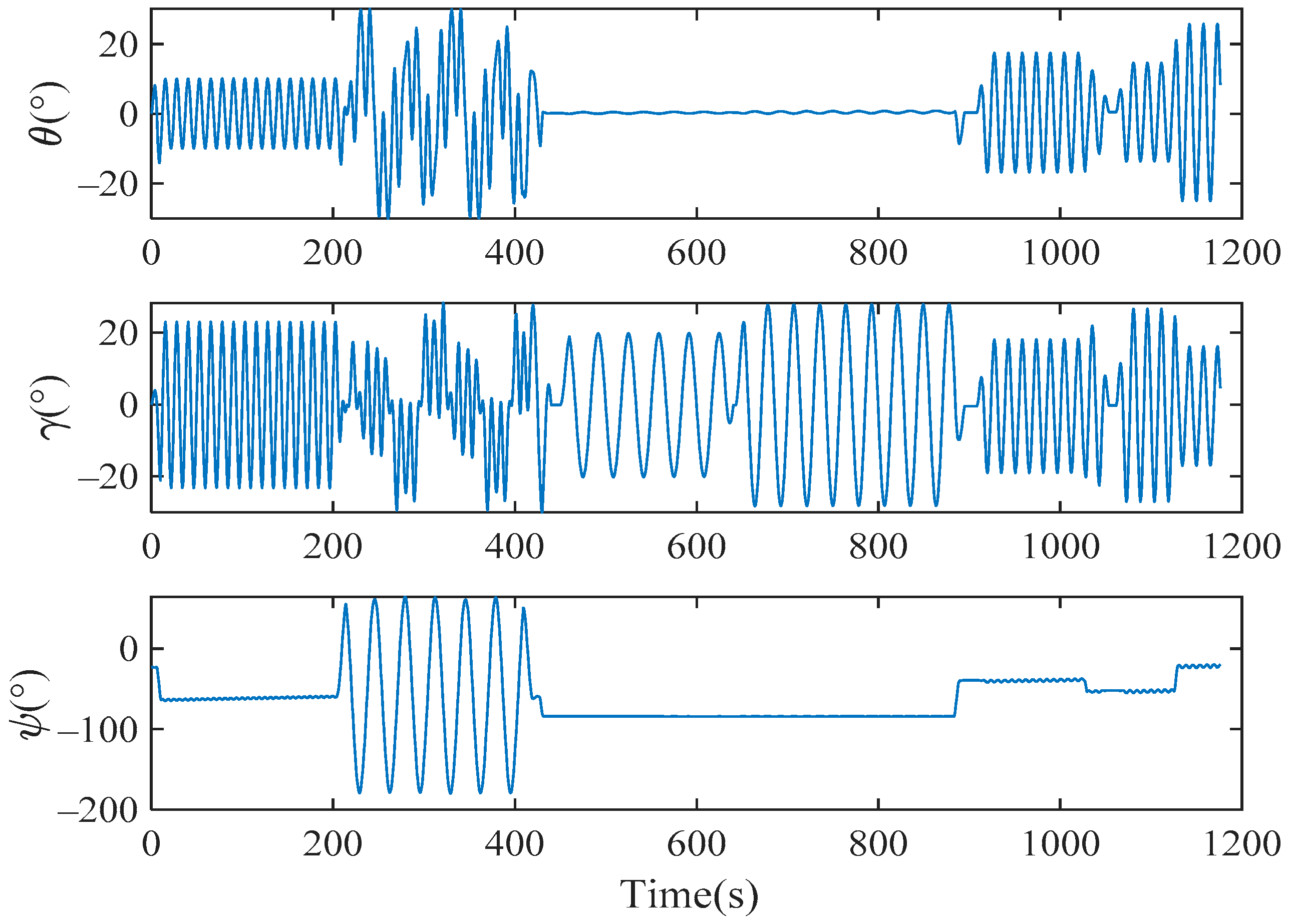
4.1. Simulation of Carrier Motion
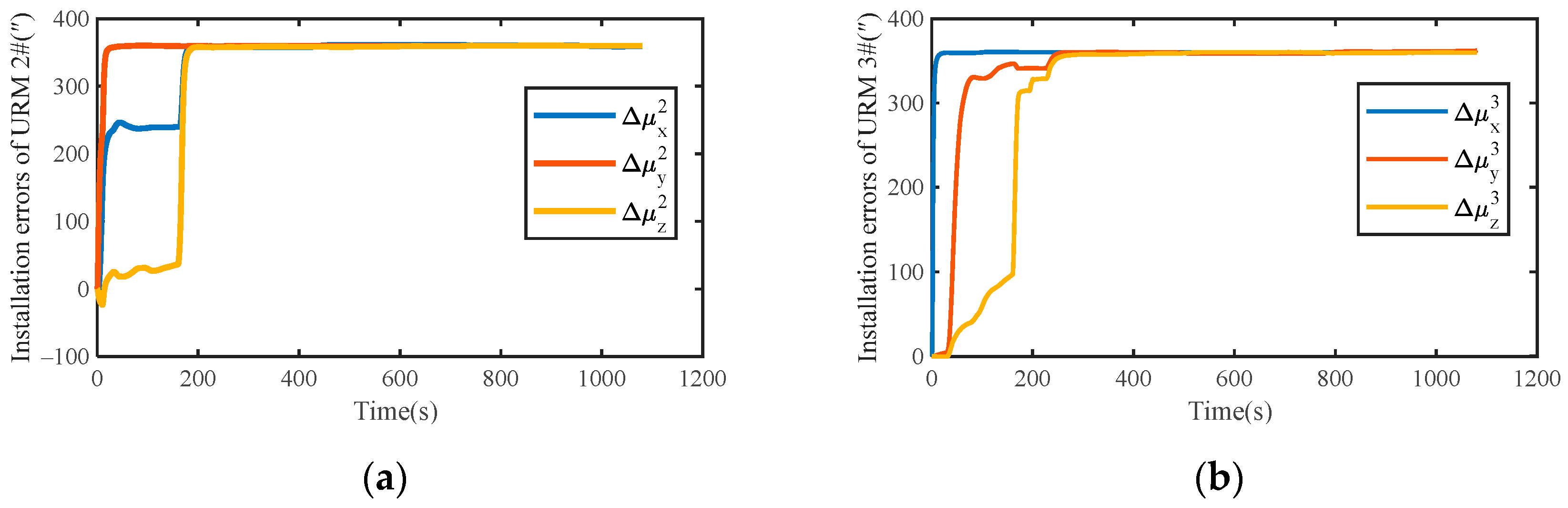
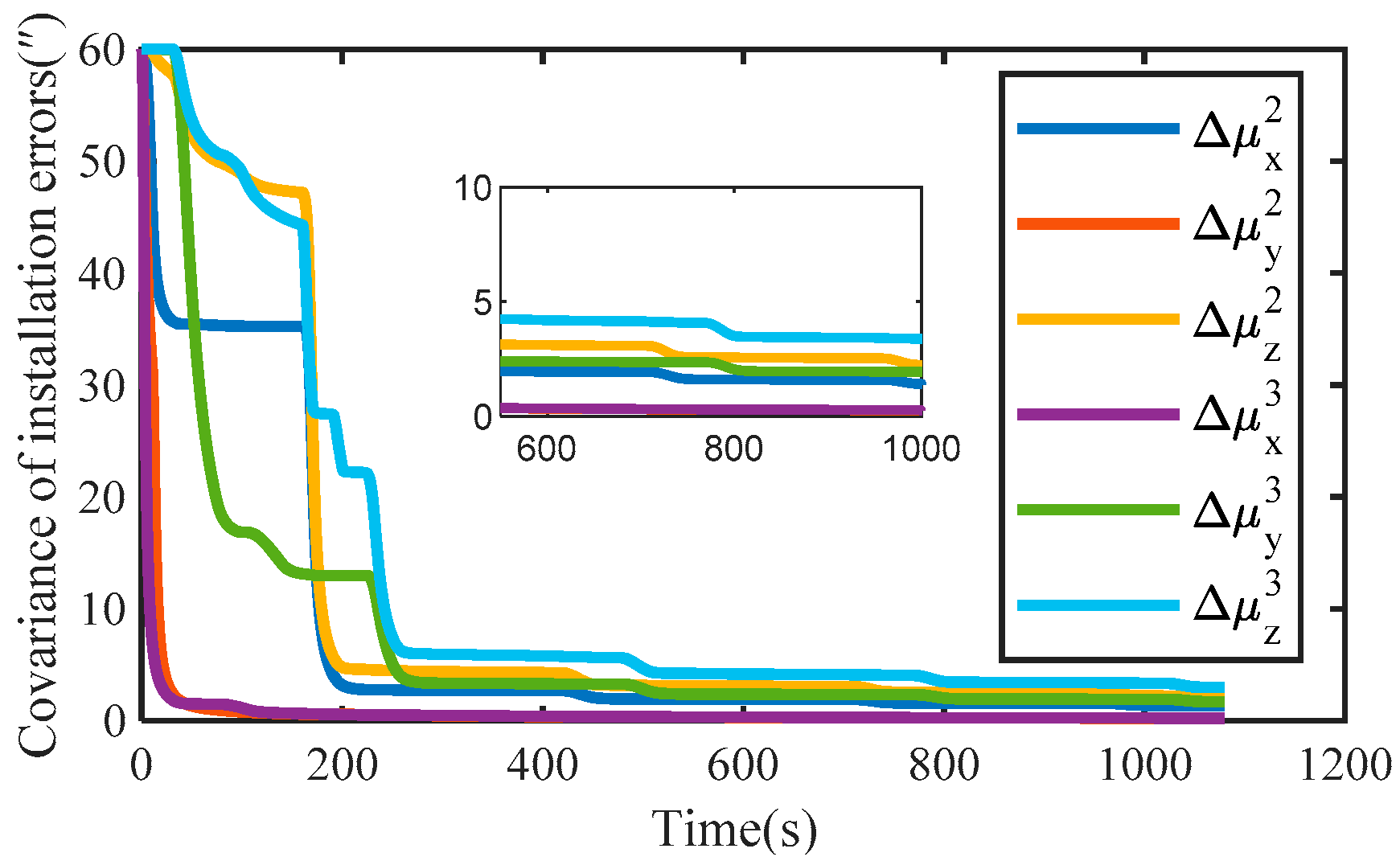
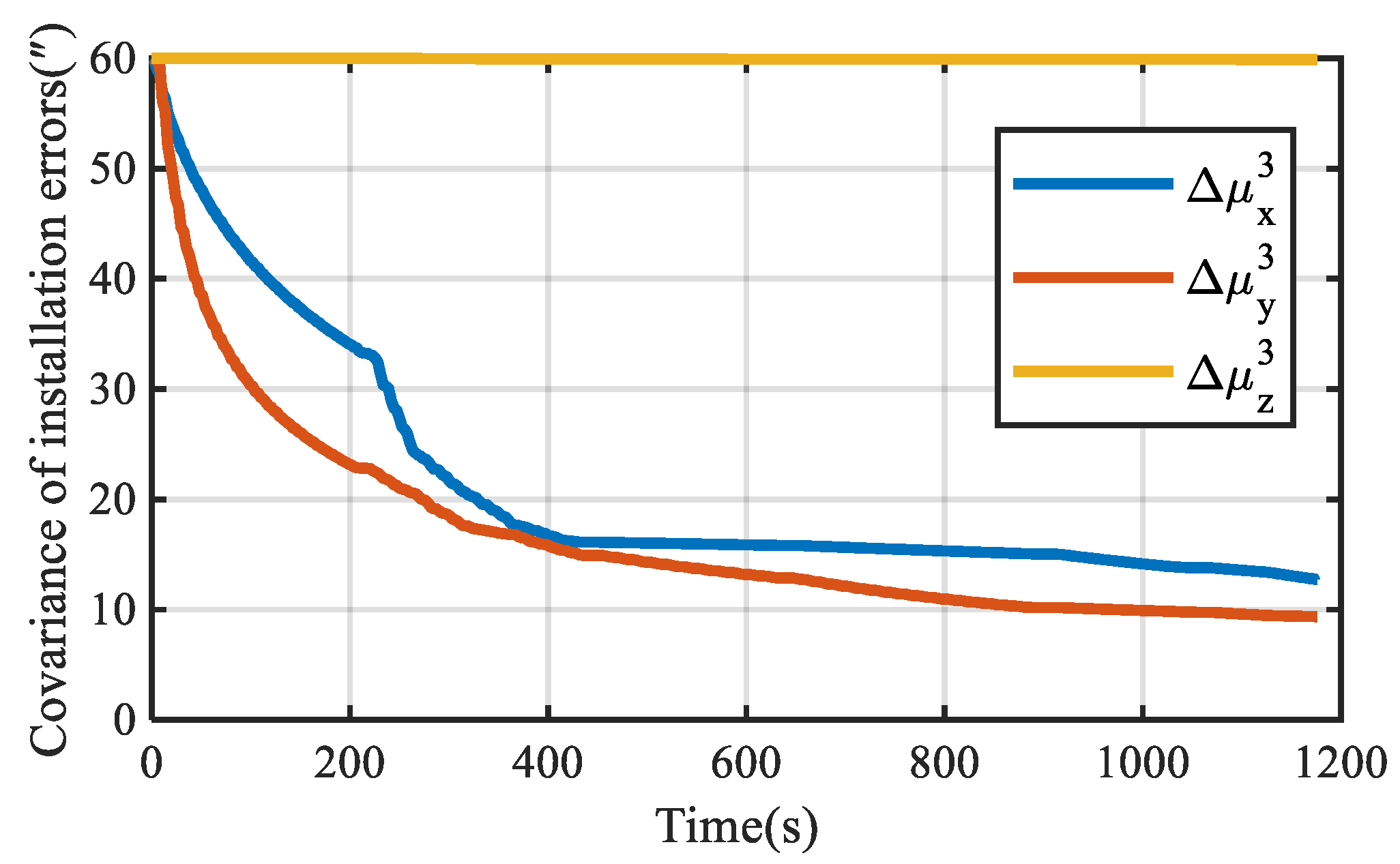
4.2. Calibration Results of Installation Errors
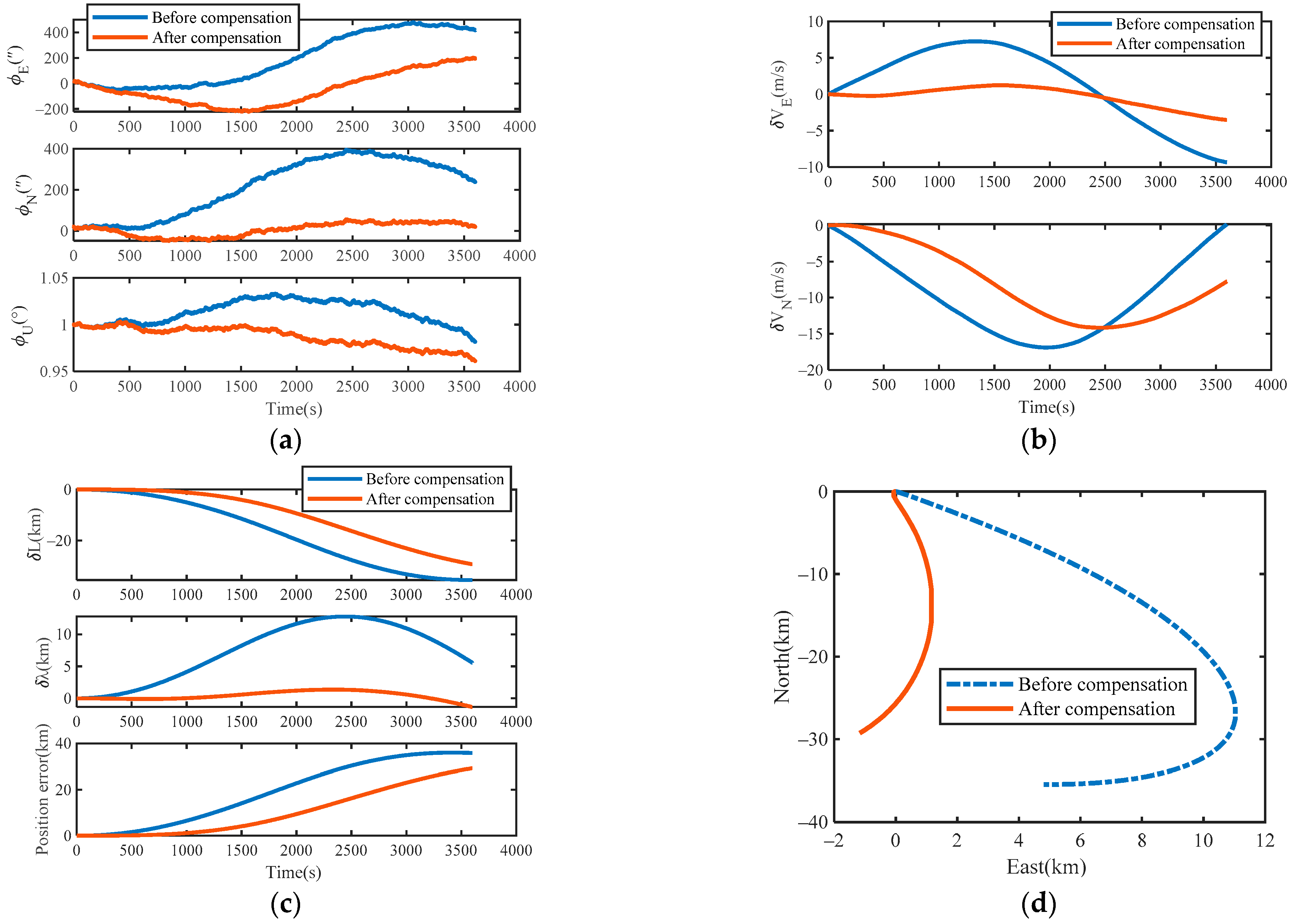
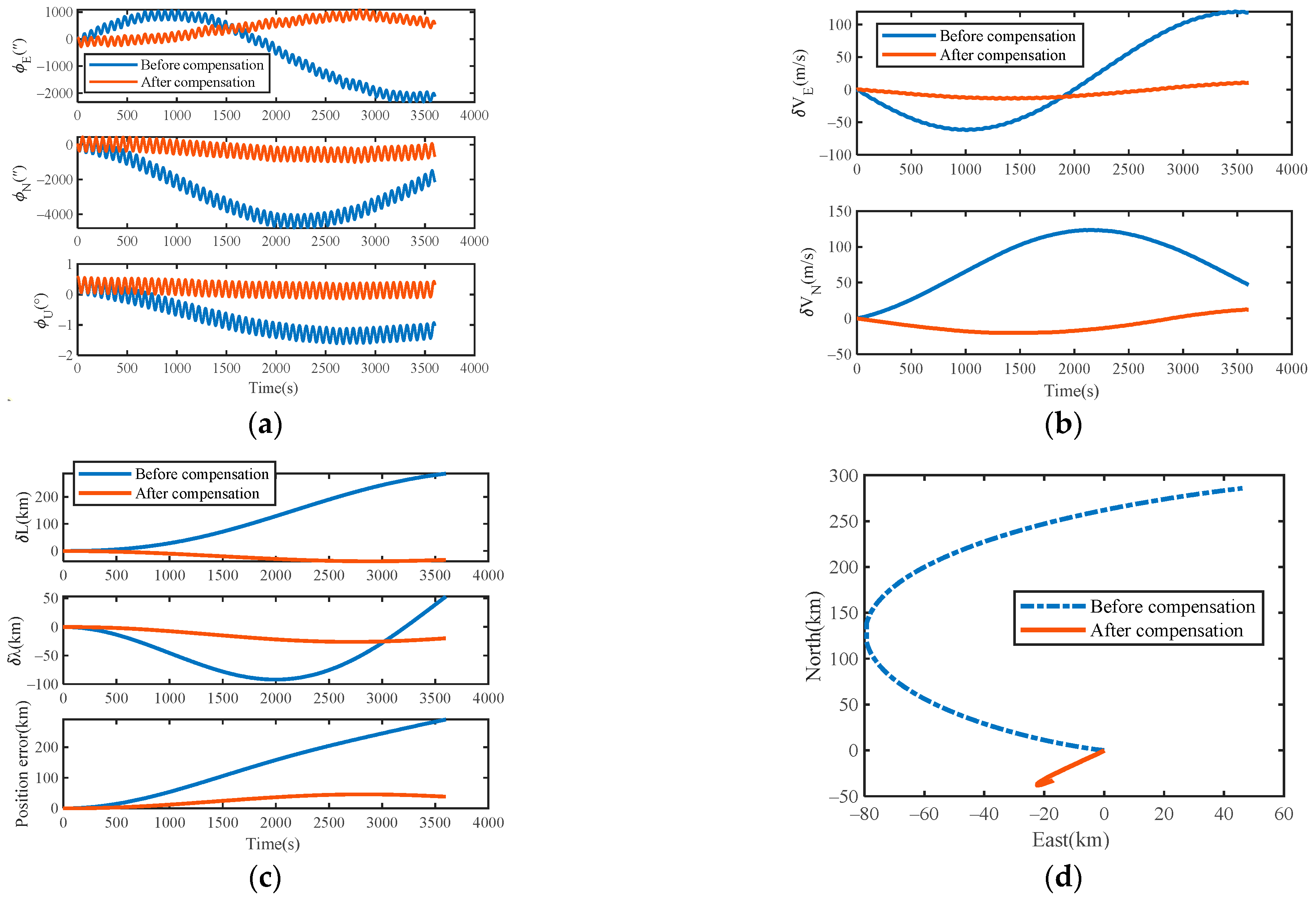
4.3. Compensation Results and Analysis
5. Experimental Results and Analysis
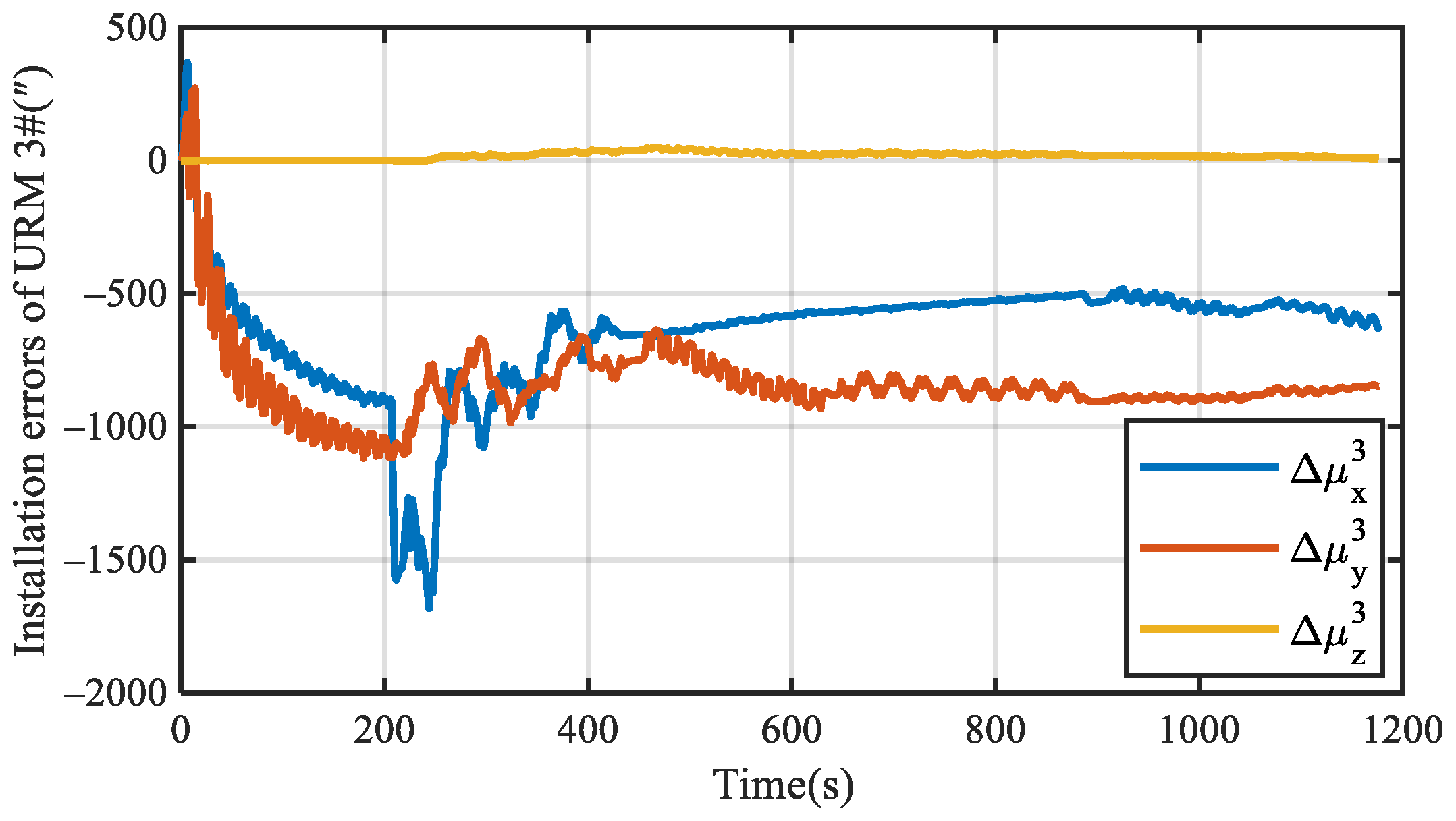
5.1. Experimental Results of Self-Calibration
5.2. Compensation Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; ISBN 978-3-642-30465-1. [Google Scholar]
- Adams, G.; Gokhale, M. Fiber Optic Gyro Based Precision Navigation for Submarines. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Boston, MA, USA, 19–22 August 2013; p. 4384. [Google Scholar]
- Kang, L.; Ye, L.; Song, K. A Fast In-Motion Alignment Algorithm for DVL Aided SINS. Math. Probl. Eng. 2014, 2014, e593692. [Google Scholar] [CrossRef] [Green Version]
- Huang, T.; Jiang, H.; Zou, Z.; Ye, L.; Song, K. An Integrated Adaptive Kalman Filter for High-Speed UAVs. Appl. Sci. 2019, 9, 1916. [Google Scholar] [CrossRef] [Green Version]
- Zou, Z.; Huang, T.; Ye, L.; Song, K. CNN Based Adaptive Kalman Filter in High-Dynamic Condition for Low-Cost Navigation System on Highspeed UAV. In Proceedings of the 2020 5th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Singapore, 17–19 July 2020; pp. 103–108. [Google Scholar]
- Shan, G.; Park, B.; Nam, S.; Kim, B.; Roh, B.; Ko, Y.-B. A 3-Dimensional Triangulation Scheme to Improve the Accuracy of Indoor Localization for IoT Services. In Proceedings of the 2015 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM), Victoria, BC, Canada, 24–26 August 2015; pp. 359–363. [Google Scholar]
- Liu, Y.; Fan, X.; Lv, C.; Wu, J.; Li, L.; Ding, D. An Innovative Information Fusion Method with Adaptive Kalman Filter for Integrated INS/GPS Navigation of Autonomous Vehicles. Mech. Syst. Signal Process. 2018, 100, 605–616. [Google Scholar] [CrossRef] [Green Version]
- Xing, H.; Liu, Y.; Guo, S.; Shi, L.; Hou, X.; Liu, W.; Zhao, Y. A Multi-Sensor Fusion Self-Localization System of a Miniature Underwater Robot in Structured and GPS-Denied Environments. IEEE Sens. J. 2021, 21, 27136–27146. [Google Scholar] [CrossRef]
- Tucker, T.; Levinson, E. The AN/WSN-7B Marine Gyrocompass/Navigator. In Proceedings of the 2000 National Technical Meeting of the Institute of Navigation, Anaheim, CA, USA, 26–28 January 2000; pp. 348–357. [Google Scholar]
- Bekkeng, J.K. Calibration of a Novel MEMS Inertial Reference Unit. IEEE Trans. Instrum. Meas. 2009, 58, 1967–1974. [Google Scholar] [CrossRef]
- Levinson, E.; Majure, R. In Proceedings of the Accuracy Enhancement Techniques Applied to the Marine Ring Laser Inertial Navigator (MARLIN), Anaheim, CA, USA, 20–23 January 1987; pp. 71–80.
- Ban, J.; Chen, G.; Meng, Y.; Shu, J. Calibration Method for Misalignment Angles of a Fiber Optic Gyroscope in Single-Axis Rotational Inertial Navigation Systems. Opt. Express 2022, 30, 6487–6499. [Google Scholar] [CrossRef]
- Ishibashi, S.; Tsukioka, S.; Sawa, T.; Yoshida, H.; Hyakudome, T.; Tahara, J.; Aoki, T.; Ishikawa, A. The Rotation Control System to Improve the Accuracy of an Inertial Navigation System Installed in an Autonomous Underwater Vehicle. In Proceedings of the 2007 Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; pp. 495–498. [Google Scholar]
- Levinson, E.; Ter Horst, J.; Willcocks, M. The Next Generation Marine Inertial Navigator Is Here Now. In Proceedings of the 1994 IEEE Position, Location and Navigation Symposium-PLANS’94, Las Vegas, NV, USA, 11–15 April 1994; pp. 121–127. [Google Scholar]
- Li, K.; Chen, Y.; Wang, L. Online Self-Calibration Research of Single-Axis Rotational Inertial Navigation System. Measurement 2018, 129, 633–641. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, M.; Wang, B.; Fu, M. Analysis and Calibration of the Nonorthogonal Angle in Dual-Axis Rotational INS. IEEE Trans. Ind. Electron. 2017, 64, 4762–4771. [Google Scholar] [CrossRef]
- Gao, P.; Li, K.; Song, T.; Liu, Z. An Accelerometers-Size-Effect Self-Calibration Method for Triaxis Rotational Inertial Navigation System. IEEE Trans. Ind. Electron. 2018, 65, 1655–1664. [Google Scholar] [CrossRef]
- Sun, W.; Xu, A.-G.; Che, L.-N.; Gao, Y. Accuracy Improvement of SINS Based on IMU Rotational Motion. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 4–10. [Google Scholar] [CrossRef]
- Li, K.; Gao, P.; Wang, L.; Zhang, Q. Analysis and Improvement of Attitude Output Accuracy in Rotation Inertial Navigation System. Math. Probl. Eng. 2015, 2015, e768174. [Google Scholar] [CrossRef] [Green Version]
- Kang, L.; Ye, L.; Song, K.; Zhou, Y. Attitude Heading Reference System Using MEMS Inertial Sensors with Dual-Axis Rotation. Sensors 2014, 14, 18075–18095. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, B.; Liao, D.; Han, S. Error Compensation of an Optical Gyro INS by Multi-Axis Rotation. Meas. Sci. Technol. 2012, 23, 025102. [Google Scholar] [CrossRef]
- Hu, X.; Wang, Z.; Weng, H.; Zhao, X. Self-Calibration of Tri-Axis Rotational Inertial Navigation System Based on Virtual Platform. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Chen, G.; Li, K.; Wang, W.; Li, P. A Novel Redundant INS Based on Triple Rotary Inertial Measurement Units. Meas. Sci. Technol. 2016, 27, 105102. [Google Scholar] [CrossRef]
- Liu, J.; Chen, G. A Four-Position Calibration Method of Inconsistent Angles between Units of TRUSINS. In Proceedings of the 2019 International Conference on Communications, Information System and Computer Engineering (CISCE), Haikou, China, 5–7 July 2019; pp. 529–532. [Google Scholar]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A New Multi-Position Calibration Method for MEMS Inertial Navigation Systems. Meas. Sci. Technol. 2007, 18, 1897–1907. [Google Scholar] [CrossRef]
- Song, N.; Cai, Q.; Yang, G.; Yin, H. Analysis and Calibration of the Mounting Errors between Inertial Measurement Unit and Turntable in Dual-Axis Rotational Inertial Navigation System. Meas. Sci. Technol. 2013, 24, 115002. [Google Scholar] [CrossRef]
- Jiang, R.; Yang, G.; Zou, R.; Wang, J.; Li, J. Accurate Compensation of Attitude Angle Error in a Dual-Axis Rotation Inertial Navigation System. Sensors 2017, 17, 615. [Google Scholar] [CrossRef] [Green Version]
- Hwang, Y.; Jeong, Y.; Kweon, I.S.; Choi, S. Online Misalignment Estimation of Strapdown Navigation for Land Vehicle under Dynamic Condition. Int. J. Automot. Technol. 2021, 22, 1723–1733. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Machine Learning Gyro Calibration Method Based on Attitude Estimation. J. Spacecr. Rockets 2021, 58, 1636–1651. [Google Scholar] [CrossRef]
- Mahdi, A.E.; Azouz, A.; Abdalla, A.E.; Abosekeen, A. A Machine Learning Approach for an Improved Inertial Navigation System Solution. Sensors 2022, 22, 1687. [Google Scholar] [CrossRef] [PubMed]
- Hua, M.; Li, K.; Lv, Y.; Wu, Q. A Dynamic Calibration Method of Installation Misalignment Angles between Two Inertial Navigation Systems. Sensors 2018, 18, 2947. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, P.; Xu, P.; Chen, B.; Wu, Q. A Self-Calibration Method for the Installation Errors of Rotation Axes Based on the Asynchronous Rotation of Rotational Inertial Navigation Systems. IEEE Trans. Ind. Electron. 2018, 65, 3550–3558. [Google Scholar] [CrossRef]
- Sun, C.; Li, K. A Positioning Accuracy Improvement Method by Couple RINSs Information Fusion. IEEE Sens. J. 2021, 21, 19351–19361. [Google Scholar] [CrossRef]
- Shen, C.; Zhang, Y.; Tang, J.; Cao, H.; Liu, J. Dual-Optimization for a MEMS-INS/GPS System during GPS Outages Based on the Cubature Kalman Filter and Neural Networks. Mech. Syst. Signal Process. 2019, 133, 106222. [Google Scholar] [CrossRef]
- Yan, G.; Wang, J.; Zhou, X. High-Precision Simulator for Strapdown Inertial Navigation Systems Based on Real Dynamics from GNSS and IMU Integration. In Proceedings of the China Satellite Navigation Conference (CSNC), Xi’an, China, 13–15 May 2015; Sun, J., Liu, J., Fan, S., Lu, X., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Volume 3, pp. 789–799. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inertial Sensors Errors | Value | Inertial Sensors Errors | Value |
|---|---|---|---|
| Gyroscope constant drift | Accelerometer constant bias | ||
| Gyroscope scale factor | Accelerometer scale factor | ||
| Gyroscope angle random walk | Accelerometer random walk | ||
| URM 2# orthogonal installation error | URM 3# orthogonal installation error |
| Errors | Value | Errors | Value |
|---|---|---|---|
| Pitch error (″) | 20 | Velocity error (m/s) | 0.01 |
| Roll error (″) | 20 | Position error (m) | 0.1 |
| Yaw error (°) | 1 |
| 1 | 361.86 | 359.19 | 359.08 | 359.73 | 357.42 | 357.62 |
| 2 | 360.03 | 359.90 | 358.70 | 360.67 | 359.71 | 359.40 |
| 3 | 358.21 | 360.05 | 361.03 | 359.93 | 362.16 | 358.63 |
| 4 | 367.11 | 360.27 | 359.82 | 361.17 | 353.90 | 359.95 |
| 5 | 359.88 | 359.51 | 359.23 | 360.20 | 359.13 | 359.45 |
| Average | 361.42 | 359.79 | 359.57 | 360.34 | 358.46 | 359.01 |
| Residual | −1.42 | 0.21 | 0.43 | −0.34 | 1.54 | 0.99 |
| Navigational Errors | Before Compensation | After Compensation | Improvement Range (%) |
|---|---|---|---|
| 0.07 | 0.04 | 48.60 | |
| 0.06 | 0.01 | 85.29 | |
| 1.00 | 0.97 | 2.61 | |
| 4.08 | 1.62 | 60.35 | |
| 11.15 | 9.87 | 11.51 | |
| 21.04 | 13.97 | 33.60 | |
| 5.54 | 2.89 | 47.78 | |
| 21.59 | 14.21 | 34.18 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Angular position error | ≤2″ | Angular rate error | ≤0.002°/s |
| Rotational error of shafting | ≤2″ | Angular rate range of the inner frame | |
| Shafting perpendicularity error | ≤2″ | Angular rate range of the outer frame |
| Navigational Errors | Before Compensation | After Compensation | Improvement Range (%) |
|---|---|---|---|
| 0.34 | 0.16 | 53.51 | |
| 0.86 | 0.14 | 84.28 | |
| 1.00 | 0.27 | 73.12 | |
| 65.78 | 8.81 | 86.60 | |
| 87.60 | 13.48 | 84.61 | |
| 154.54 | 26.15 | 83.08 | |
| 57.73 | 18.12 | 68.62 | |
| 162.25 | 30.52 | 81.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, M.; Ma, H.; Sun, X.; Huang, T.; Song, K. A New Self-Calibration and Compensation Method for Installation Errors of Uniaxial Rotation Module Inertial Navigation System. Sensors 2022, 22, 3812. https://doi.org/10.3390/s22103812
Niu M, Ma H, Sun X, Huang T, Song K. A New Self-Calibration and Compensation Method for Installation Errors of Uniaxial Rotation Module Inertial Navigation System. Sensors. 2022; 22(10):3812. https://doi.org/10.3390/s22103812
Chicago/Turabian StyleNiu, Meng, Hongyu Ma, Xinglin Sun, Tiantian Huang, and Kaichen Song. 2022. "A New Self-Calibration and Compensation Method for Installation Errors of Uniaxial Rotation Module Inertial Navigation System" Sensors 22, no. 10: 3812. https://doi.org/10.3390/s22103812