An Optimal Sensor Layout Using the Frequency Response Function Data within a Wide Range of Frequencies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Optimal Sensor Design
2.1. POD and Model Reduction
2.2. MAC-Based OSP Approach
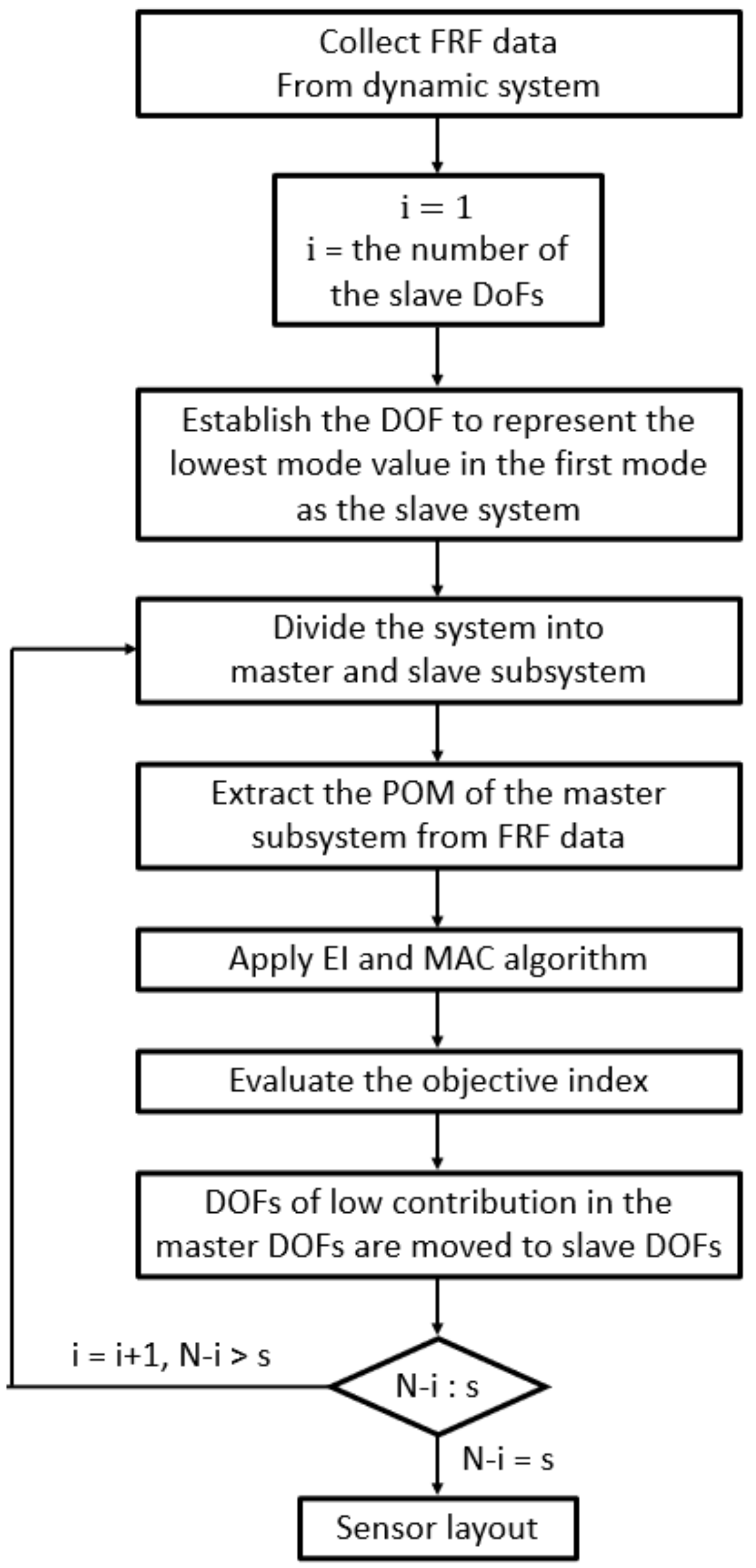
2.3. EI-Based OSP Approach
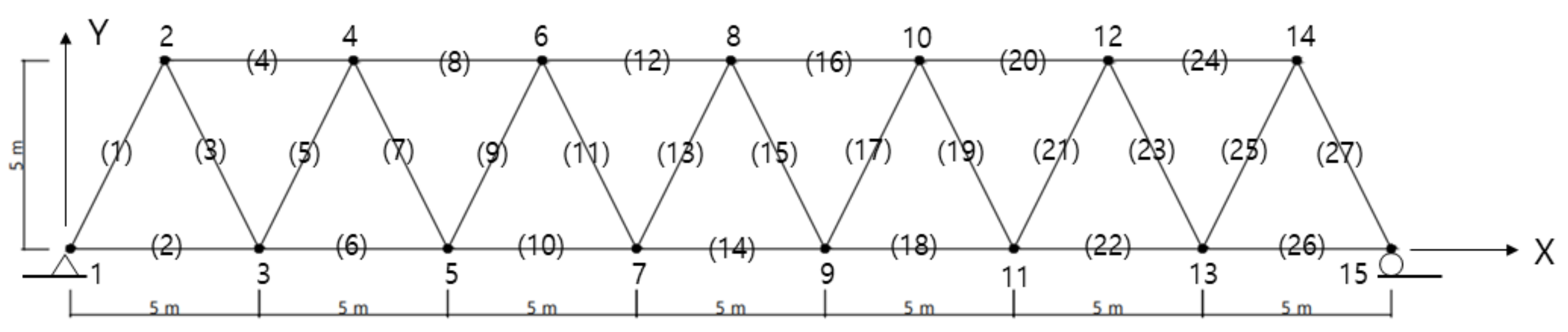
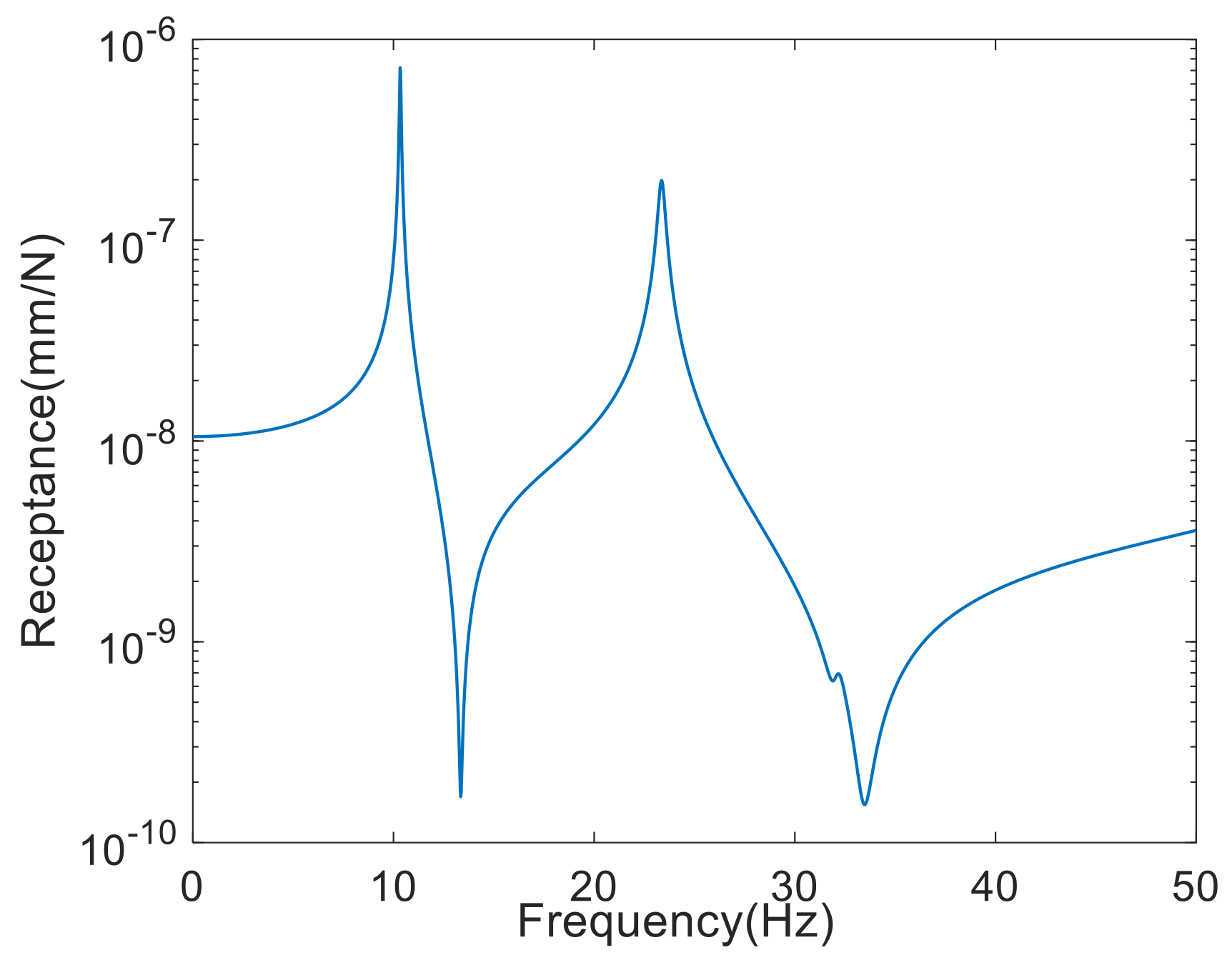
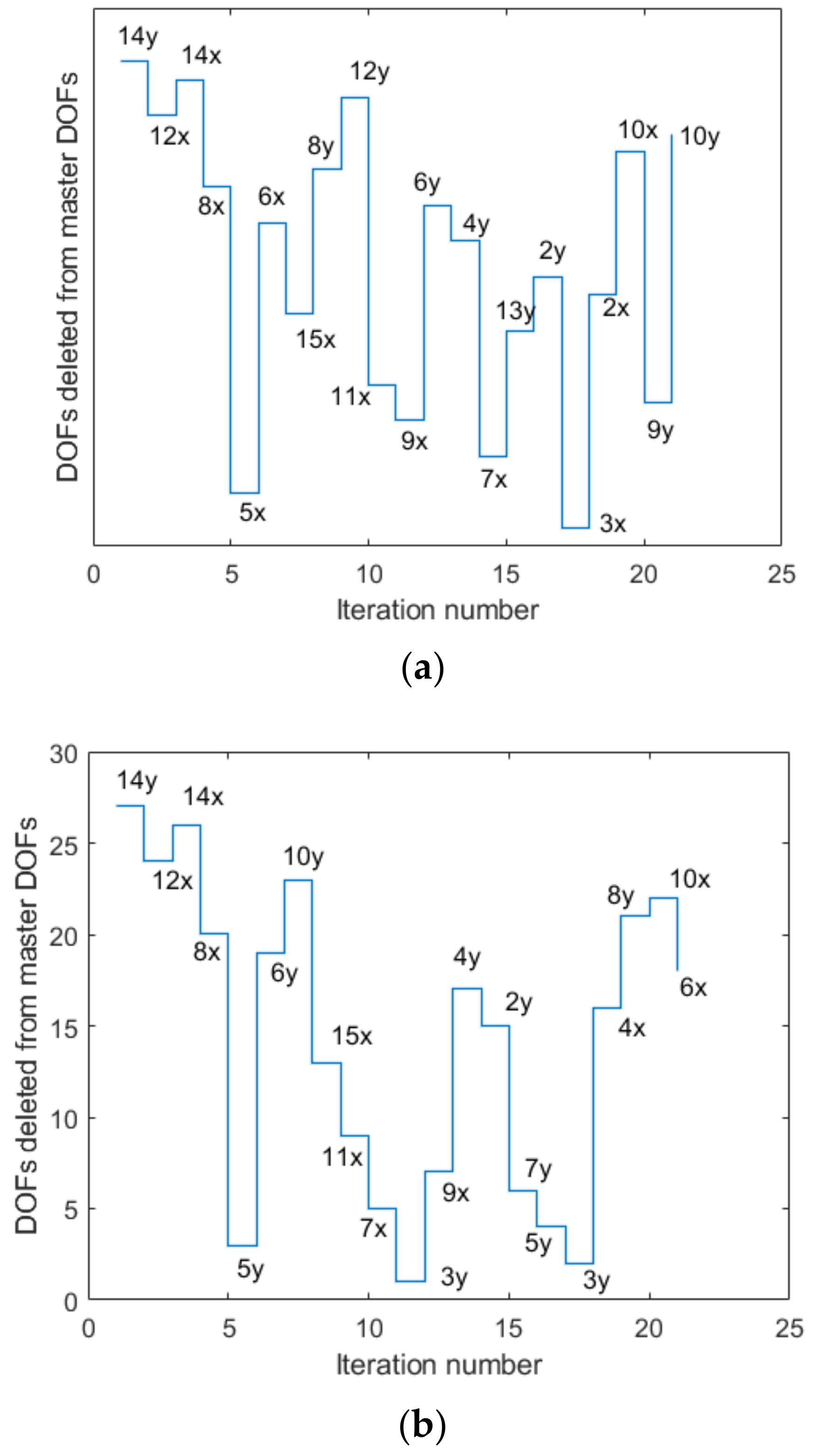
3. Numerical Example
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kammer, D.C. Sensor placement for on-orbit modal identification and correlation of large space structures. J. Guid. Control Dyn. 1991, 14, 251–259. [Google Scholar] [CrossRef]
- Kammer, D.C.; Yao, L. Enhancement of on-orbit modal identification of large space structures through sensor placement. J. Sound Vib. 1994, 171, 119–139. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, D.; Song, G. On the physical significance of the effective independence method for sensor placement. J. Phys. Conf. Ser. 2017, 842, 012030. [Google Scholar] [CrossRef] [Green Version]
- Friswell, M.I.; Castro-Triguero, R. Clustering of sensor locations using the effective independence method. AIAA J. 2015, 53, 1388–1390. [Google Scholar] [CrossRef] [Green Version]
- Lee, E.-T.; Eun, H.-C. Optimal sensor placement in reduced-order models using modal constraint conditions. Sensors 2022, 22, 589. [Google Scholar] [CrossRef] [PubMed]
- Carne, T.G.; Dohrmann, C.R. A modal test design strategy for model correlation. In Proceedings of the 13th International Society for Optical Engineering Conference, New York, NY, USA, 13–16 February 1995; pp. 927–933. [Google Scholar]
- He, C.; Xing, J.; Li, J.; Yang, Q.; Wang, R.; Zhang, X. A new optimal sensor placement strategy based on modified modal assurance criterion and improved genetic algorithm for structural health monitoring. Math. Probl. Eng. 2015, 2015, 626342. [Google Scholar] [CrossRef] [Green Version]
- Fu, Y.M.; Yu, L. Optimal sensor placement based on MAC and SPGA algorithm. Adv. Mat. Res. 2012, 594–597, 1118–1122. [Google Scholar] [CrossRef]
- Brehm, M.; Zabel, V.; Bucher, C. An automatic mode pairing strategy using an enhanced modal assurance criterion based on modal strain energies. J. Sound Vib. 2010, 329, 5375–5392. [Google Scholar] [CrossRef]
- Jung, B.K.; Cho, J.R.; Jeong, W.B. Sensor placement optimization for structural modal identification of flexible structures using genetic algorithm. J. Mech. Sci. Technol. 2015, 29, 2775–2783. [Google Scholar] [CrossRef]
- Morlier, J.; Basile, A.; Chiplunkar, A.; Charlotte, M. An EGO-like optimization framework for sensor placement optimization in modal analysis. Smart Mater. Struct. 2018, 27, 075004–075022. [Google Scholar] [CrossRef] [Green Version]
- Rao, A.R.M.; Lakshmi, K.; Krishnakumar, S. A generalized optimal sensor placement technique for structural health monitoring and system identification. Procedia Eng. 2014, 86, 529–538. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Palencia, A.; Santini-Bell, E.; Gul, M.; Catbas, N. A FRF-based algorithm for damage detection using experimentally collected data. Struct. Monit. Maint. 2015, 2, 399–418. [Google Scholar] [CrossRef]
- Alqam, H.M.; Dhingra, A.K. Frequency response-based indirect load identification using optimum placement of strain gages and accelerometers. J. Vib. Acoust. 2019, 141, 031013. [Google Scholar] [CrossRef]
- Yuan, C.; Zhang, J. An Approach to Optimal Sensor Placement for Vibration Tests on Large Structures; Inter-Noise: Melbourne, Australia, 2014. [Google Scholar]
- Kerschen, G.; Golinval, J.-C.; Vakakis, A.F.; Bergman, L.A. The method of proper orthogonal decomposition for dynamical characterization and order reduction of mechanical systems: An overview. Nonlinear Dyn. 2005, 41, 147–169. [Google Scholar] [CrossRef]
- Nimityongskul, S.; Kammer, D.C. Frequency response based sensor placement for the mid-frequency range. Mech. Syst. Signal. Process. 2009, 23, 1169–1179. [Google Scholar] [CrossRef]
- Cherng, A.-P. Optimal sensor placement for modal parameter identification using signal subspace correlation techniques. Mech. Syst. Signal. Process. 2003, 17, 361–378. [Google Scholar] [CrossRef]
- Sun, H.; Buyukozturk, O. Optimal sensor placement in structural health monitoring using discrete optimization. Smart Mater. Struct. 2015, 24, 125034. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, E.-T.; Eun, H.-C. An Optimal Sensor Layout Using the Frequency Response Function Data within a Wide Range of Frequencies. Sensors 2022, 22, 3778. https://doi.org/10.3390/s22103778
Lee E-T, Eun H-C. An Optimal Sensor Layout Using the Frequency Response Function Data within a Wide Range of Frequencies. Sensors. 2022; 22(10):3778. https://doi.org/10.3390/s22103778
Chicago/Turabian StyleLee, Eun-Taik, and Hee-Chang Eun. 2022. "An Optimal Sensor Layout Using the Frequency Response Function Data within a Wide Range of Frequencies" Sensors 22, no. 10: 3778. https://doi.org/10.3390/s22103778