4.1. Simulation Scenario 1
As a verification for the proposed algorithm, the simulation data in [
16] was selected. The area is [110, 180] m
[110, 180] m. There are four targets;
Figure 1 is the targets’ real track. The targets are all born at Step 1 and alive all the time, except the blue one which dies at Step 40. Targets kinematic state include the position and velocity
and each observation is a vector of position
. The parameters used in (23) and (27) are given as
where
is the Kronecker product,
= 1 is the sampling period, and
. In formula (25), which denotes the prediction step of IG distribution,
is set as 0.9. The parameter
in likelihood function
for feature d is 10. In formula (61), we set
,
, and
,
. In the simulation, we let the survival probability be 0.99, i.e.,
. The parameters used in the pruning and merging processes are the same as in [
16,
25]. The proposed algorithm was compared with the GM-PMBM filter and the BGM-PMBM filter which can also estimate the detection probability online. The generalized optimal sub-pattern (GOSPA) [
34] assignment metric with parameters
is employed to assess the performance of filters. The GOSPA is defined as
The denotes the assignment set between and . In this situation, , and denote the location error (LE), miss error (ME), and false error (FE), respectively. Besides , p.
There are two cases to be considered: fixed detection probability and time-varying probability.
Case 1-Fixed detection probability: In this scenario, the target detection probability is fixed. Targets are born according to a Poisson process with intensity:
where
and Gaussian density with mean [100;0;100;0], covariance
.
and
denotes the parameters of IG distribution [
25], thus the feature used for detection is 10. Clutter is also a Poisson process with intensity
, where the clutter rate is
. The parameters of IG distribution are
and
. The parameters are summarized in
Table 1. The parameters used in the BGM distribution are the same as in [
23].
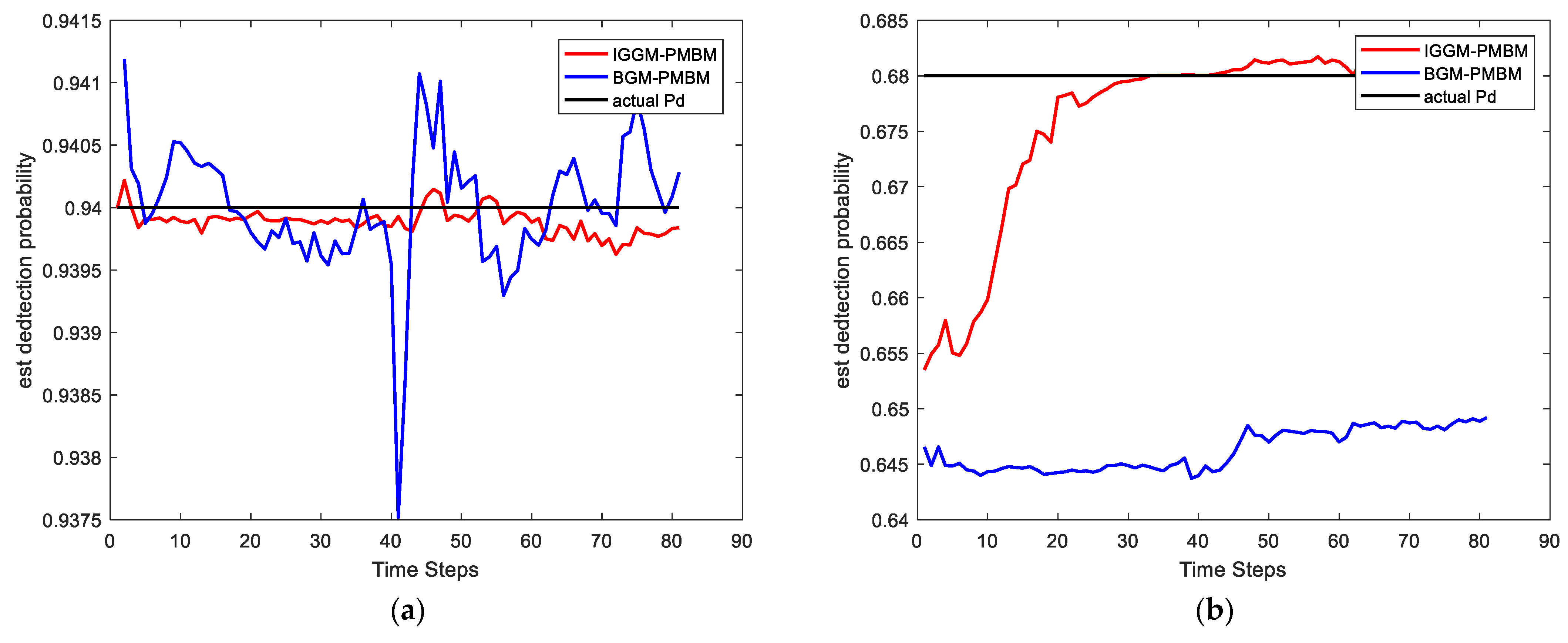
In this simulation, we set the
as two different values: 9 and 5.5, thus the corresponding detection probability is 0.68 and 0.94 respectively.
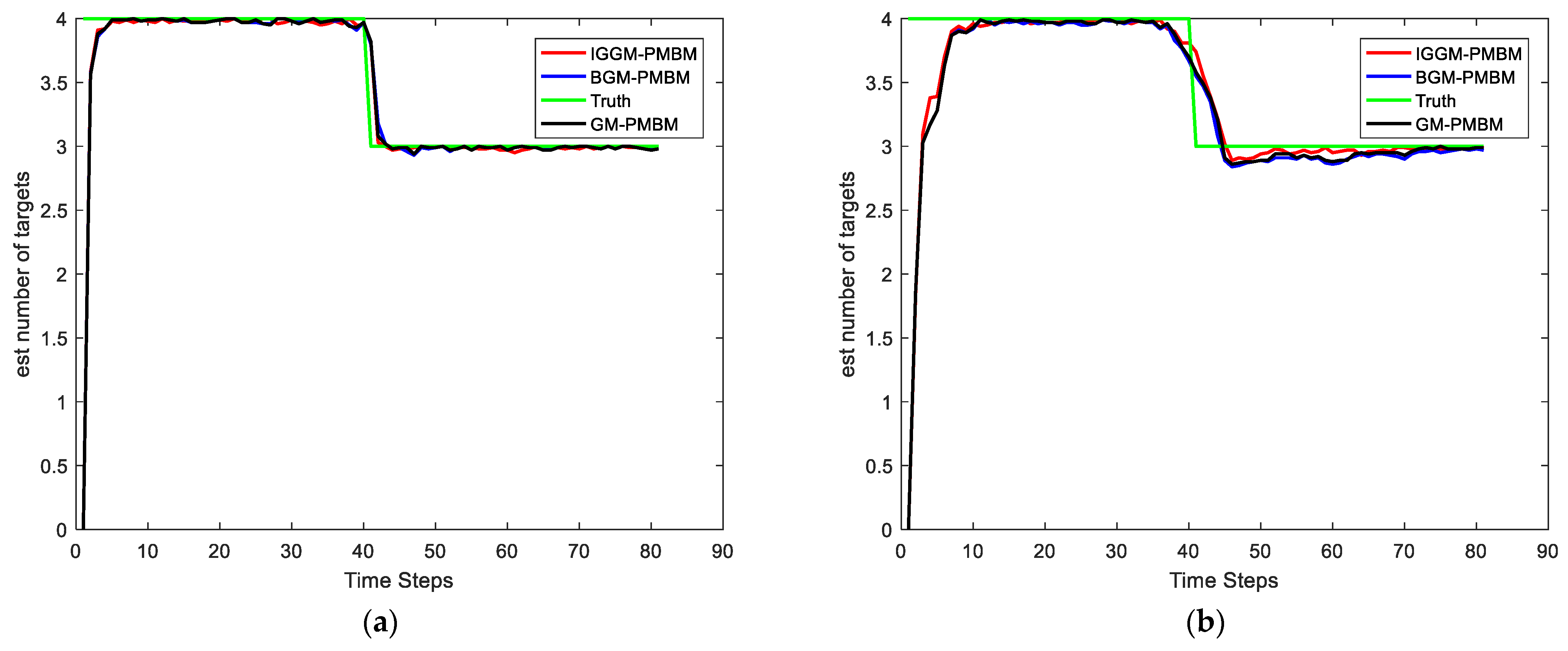
Figure 2 and
Figure 3 show the average results, corresponding to the performance metrics on their GOSPA error and the number of targets. In
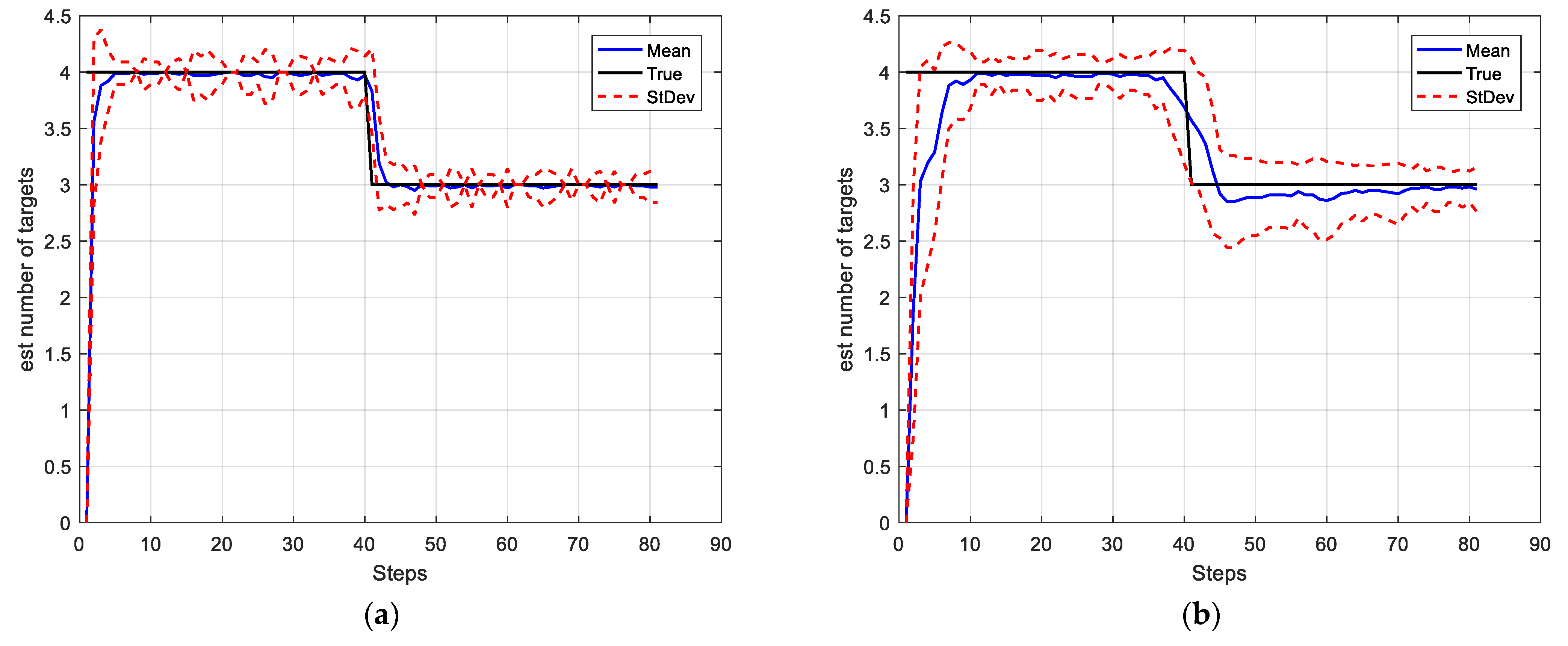
Figure 2, the result shows that the multitarget tracking performance of the proposed IGGM-PMBM filter is similar to the standard GM-PMBM filter with the similar GOSPA distance, where the detection probability is exactly known, fixed and high. Whereas in the low probability scenario, the BGM-PMBM filter and GM-PMBM filter yield slightly higher GOSPA error than IGGM-PMBM, especially the BGM-PMBM. This simulation shows that the proposed IGGM-PMBM filter outperforms the BMG-PMBM filter and GM-PMBM filter with low detection probability. The standard deviation range (StDev) values of estimated number of targets of IGGM-PMBM and BGM-PMBM are shown in
Figure 4 and
Figure 5. On the other hand, it can be seen in
Figure 6 that the estimation of
of IGGM-PMBM is more accurate.
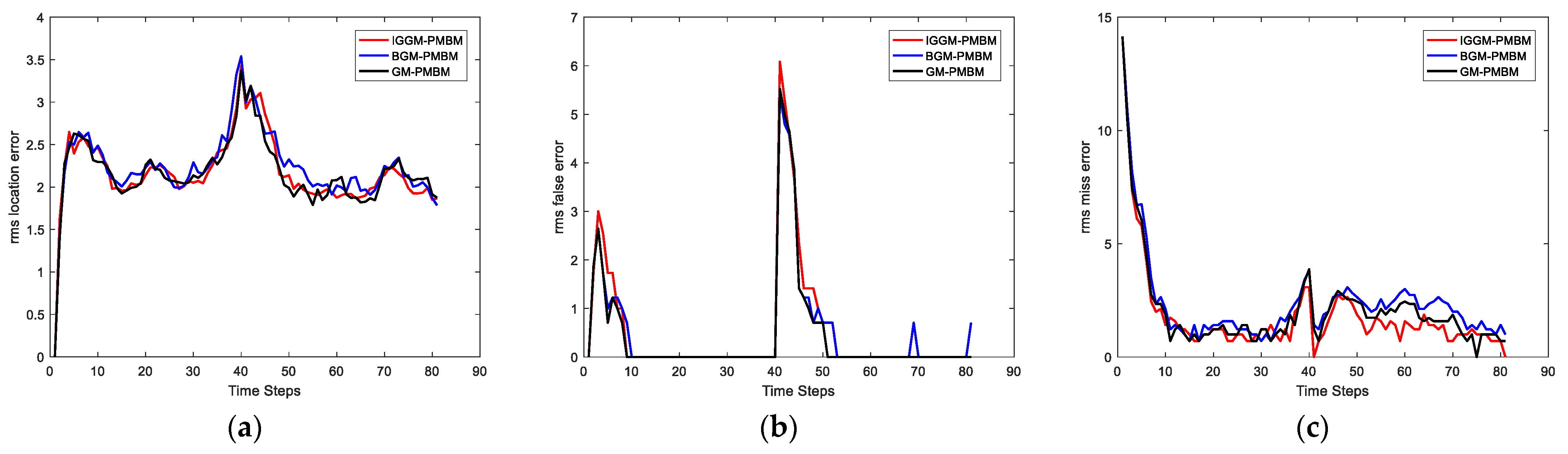
Figure 7 gives the comparisons of LE, ME, and FE when the detection probability is 0.68. The performance comparisons in terms of average GOSPA, LE, ME, and FE with different parameters (detection probabilities and clutter rates) are shown in
Table 2. The results show that the performance of the proposed IGGM-PMBM filter is better than the BGM-PMBM filter and the GM-PMBM filter under the same parameters.
The three filters are run separately on an AMD Core 3.20 GHz CPU PC with 16 GB RAM and MATLAB R2021b. The complexity is also illustrated by comparing the computational time. Based on 100 Monte Carlo runs, the average computational times of the three filters are shown in
Table 3. It can be seen that the computation complexity of IGGM-PMBM is slightly higher than the GM-PMBM filter in a high detection probability scenario, and with the detection probability decreasing, the IGGM-PMBM filter costs more time to tackle the unknown target detection probability situation. Besides, the IGGM-PMBM filter has almost the same complexity as the BGM-PMBM filter.
Case 2-Changing detection probability: In this scenario, the detection probability is varying with time. We set different parameters to express the different feature values for detection as
Table 4. The
in this case is 5.5, thus the detection probabilities are 0.94, 0.81, and 0.69 respectively. Other parameters are the same as in Case 1. The average GOSPA error, LE, FE, ME, and cardinality estimate as well as estimate of
are shown in
Figure 8. It can be seen that the estimates of
of the IGGM-PMBM filter is more accurate than BGM-PMBM filter for each segment. Moreover, the GOSPA errors of the proposed IGGM-PMBM is smaller than that of BGM-PMBM.
Figure 9 gives the StDev of the estimated number of targets of the IGGM-PMBM filter and BGM-PMBM filter under the detection probability vary.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}