
VLC Network Design for High Mobility Users in Urban Tunnels

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Related Works
2.1. Handover Process
2.2. Handover for Vehicular VLC
3. Overview of IEEE 802.15.7
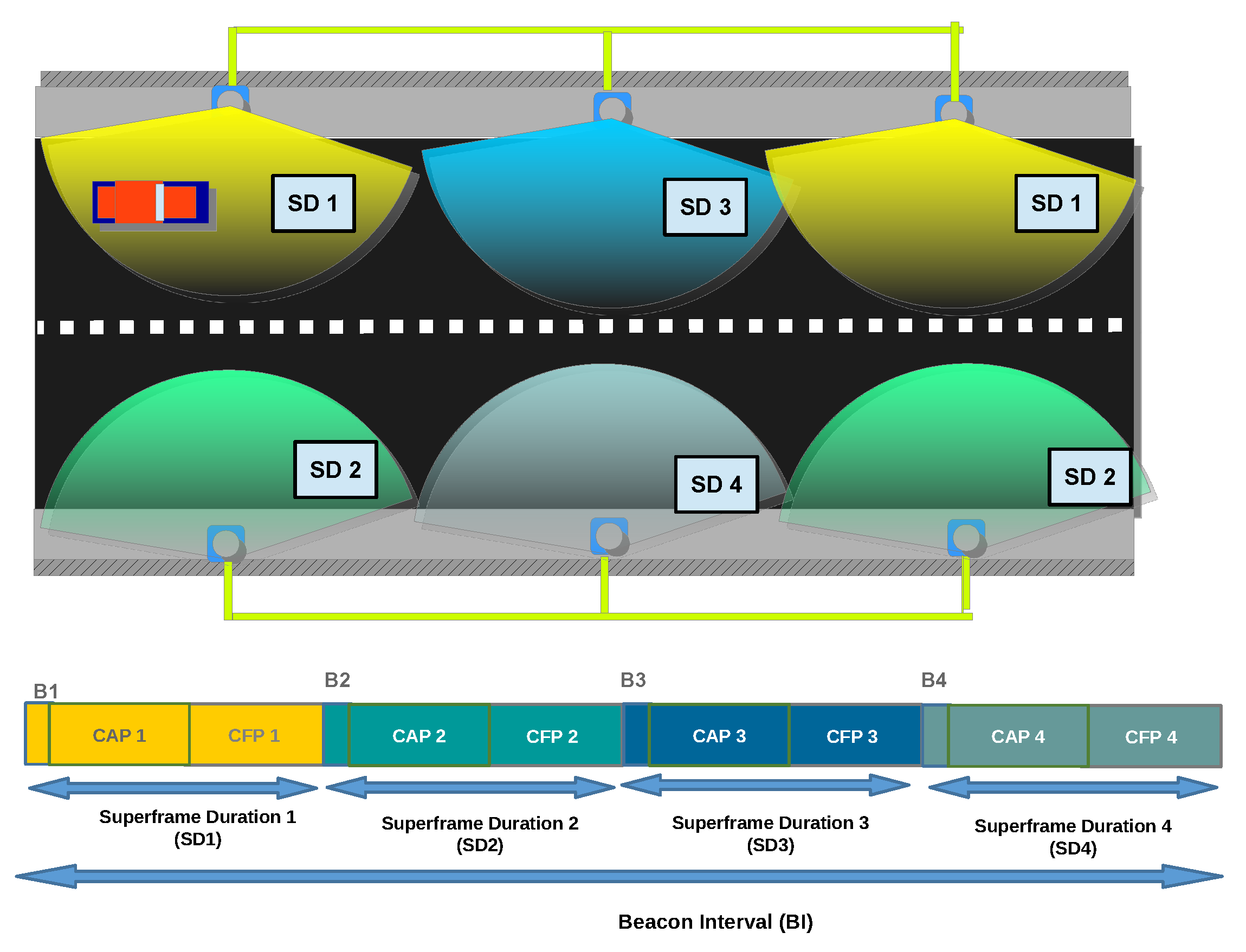
3.1. IEEE 802.15.7 MAC Layer
3.2. IEEE 802.15.7 Physical Layer
4. Proposed VLC Network for High Mobility
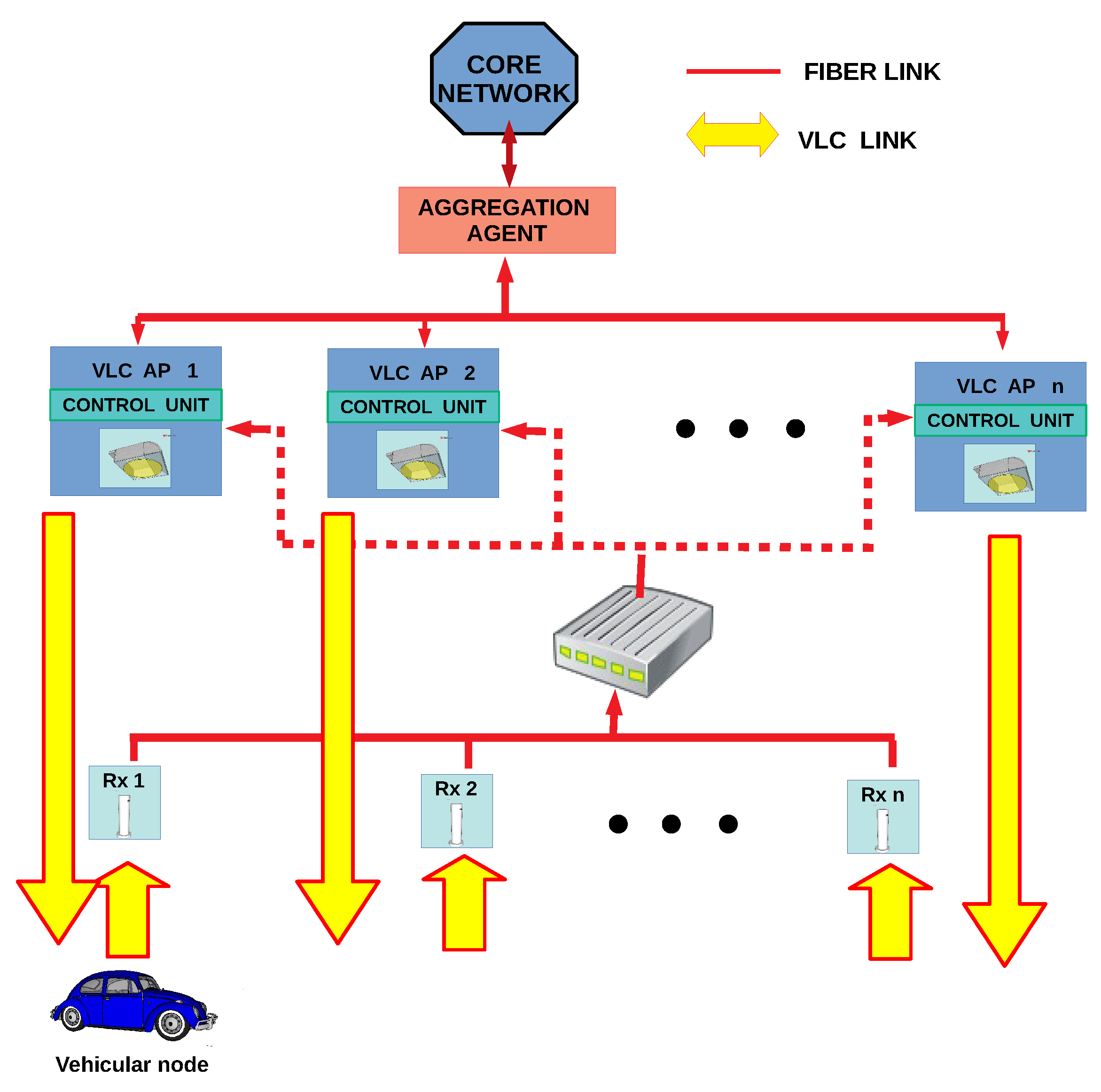
4.1. VLC Network Topology
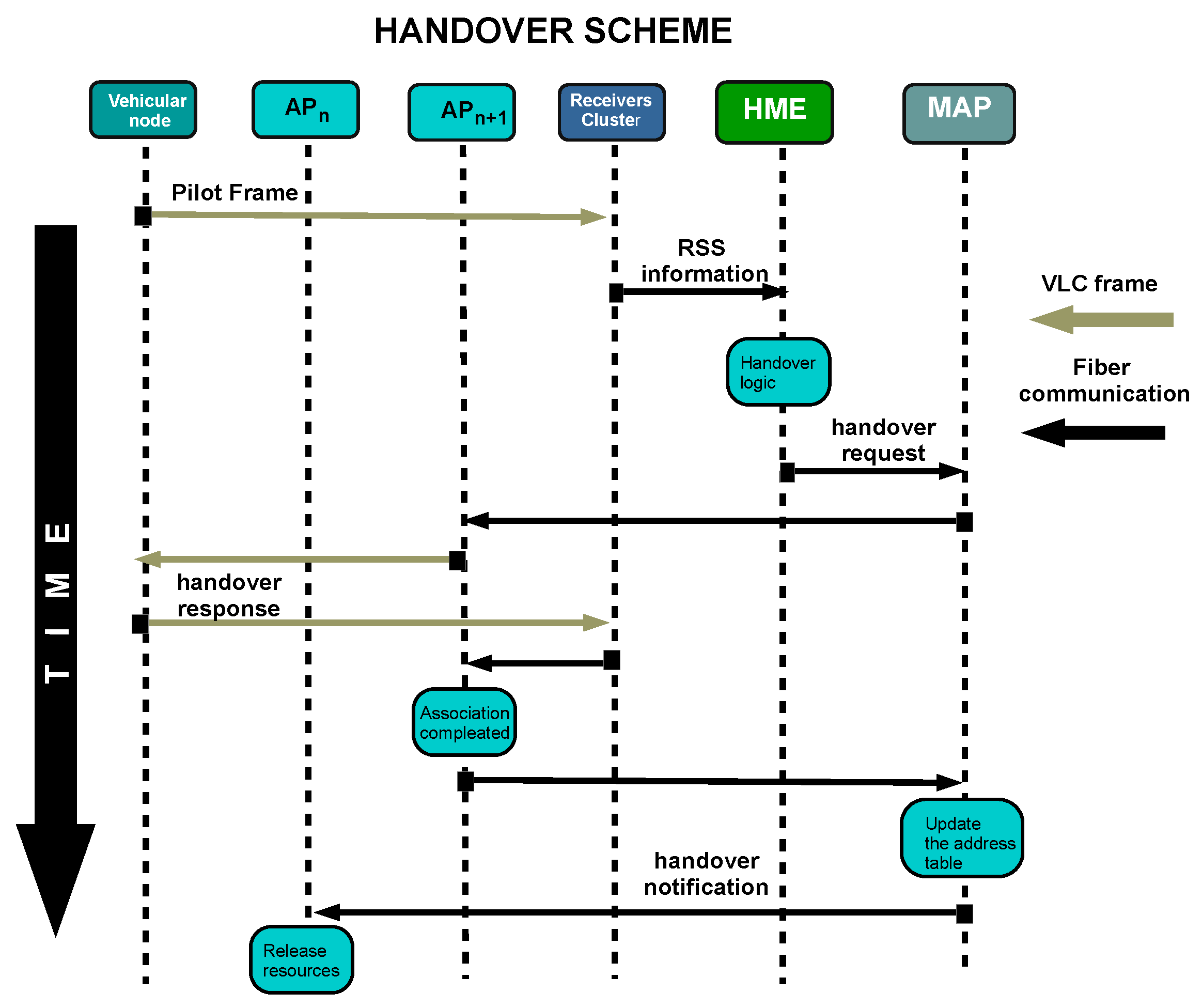
4.2. Handover Strategy
5. Evaluation Methodology
- Configuration 1: Perform the handover process using only uplink information, i.e., satisfy the “Condition 1” criterion, in a conventional network topology.
- Configuration 2: Perform the handover process with the “Condition 1” criterion in the 2.5 layer network topology.
- Configuration 3: Perform the handover process using both uplink and downlink information, i.e., satisfy “Condition 1” and “Condition 2” criteria, in the 2.5 layer network topology, see Figure 8.
5.1. Network Simulation Tool
5.2. Experimental Setup
5.3. Performance Analysis
6. Results and Discussion
6.1. Single Vehicle
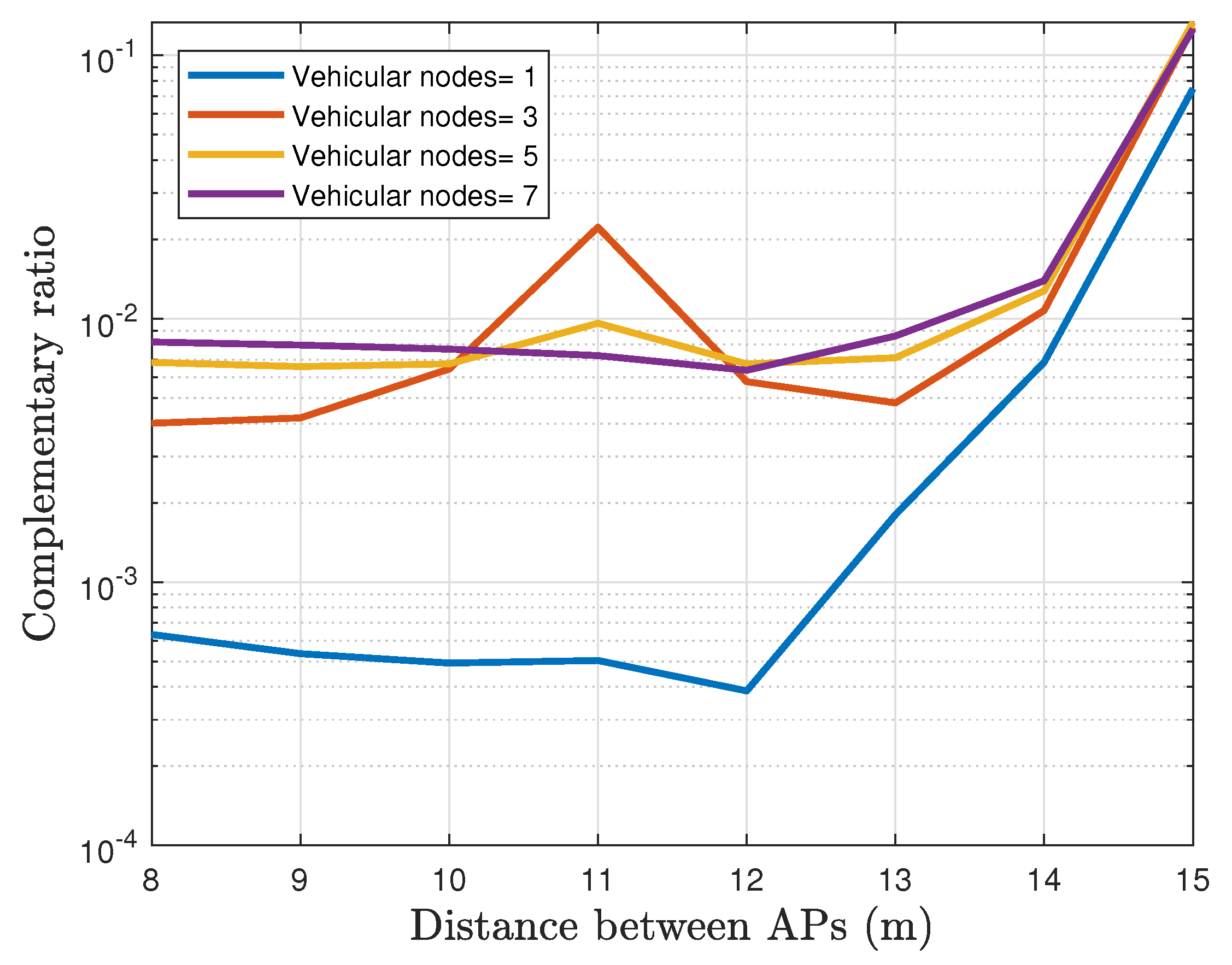
6.2. Multiple Vehicles
6.3. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kenney, J.B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Ahmed-Zaid, F.; Bai, F.; Bai, S.; Basnayake, C.; Bellur, B.; Brovold, S.; Brown, G.; Caminiti, L.; Cunningham, D.; Elzein, H.; et al. Vehicle Safety Communications—Applications (VSC-A) Final Report: Appendix Volume 3 Security. Available online: https://trid.trb.org/view/1136550 (accessed on 8 November 2021).
- Vinel, A. 3GPP LTE Versus IEEE 802.11p/WAVE: Which Technology is Able to Support Cooperative Vehicular Safety Applications? IEEE Wirel. Commun. Lett. 2012, 1, 125–128. [Google Scholar] [CrossRef] [Green Version]
- Căilean, A.; Dimian, M. Current Challenges for Visible Light Communications Usage in Vehicle Applications: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2681–2703. [Google Scholar] [CrossRef]
- Cailean, A.; Dimian, M. Impact of IEEE 802.15.7 Standard on Visible Light Communications Usage in Automotive Applications. IEEE Commun. Mag. 2017, 55, 169–175. [Google Scholar] [CrossRef]
- Turan, B.; Narmanlioglu, O.; Ergen, S.C.; Uysal, M. Physical Layer Implementation of Standard Compliant Vehicular VLC. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Lee, S.J.; Jung, S.Y. A SNR analysis of the visible light channel environment for visible light communication. In Proceedings of the 2012 18th Asia-Pacific Conference on Communications (APCC), Jeju, Korea, 15–17 October 2012; pp. 709–712. [Google Scholar] [CrossRef]
- Turan, B.; Narmanlioglu, O.; Ergen, S.C.; Uysal, M. Broadcasting brake lights with MIMO-OFDM based vehicular VLC. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Luo, P.; Ghassemlooy, Z.; Le Minh, H.; Bentley, E.; Burton, A.; Tang, X. Fundamental analysis of a car to car visible light communication system. In Proceedings of the 2014 9th International Symposium on Communication Systems, Networks Digital Sign (CSNDSP), Manchester, UK, 23–25 July 2014; pp. 1011–1016. [Google Scholar] [CrossRef]
- Yu, S.; Shih, O.; Tsai, H.; Wisitpongphan, N.; Roberts, R.D. Smart automotive lighting for vehicle safety. IEEE Commun. Mag. 2013, 51, 50–59. [Google Scholar] [CrossRef]
- Avătămăniței, S.A.; Căilean, A.M.; Done, A.; Dimian, M.; Popa, V.; Prelipceanu, M. Design and Intensive Experimental Evaluation of an Enhanced Visible Light Communication System for Automotive Applications. Sensors 2020, 20, 3190. [Google Scholar] [CrossRef]
- Kim, Y.H.; Cahyadi, W.A.; Chung, Y.H. Experimental demonstration of LED-based vehicle to vehicle communication under atmospheric turbulence. In Proceedings of the 2015 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 28–30 October 2015; pp. 1143–1145. [Google Scholar] [CrossRef]
- Kim, Y.H.; Cahyadi, W.A.; Chung, Y.H. Experimental Demonstration of VLC-Based Vehicle-to-Vehicle Communications under Fog Conditions. IEEE Photonics J. 2015, 7, 1–9. [Google Scholar] [CrossRef]
- Matus, V.; Guerra, V.; Zvanovec, S.; Rabadan, J.; Perez-Jimenez, R. Sandstorm effect on experimental optical camera communication. Appl. Opt. 2021, 60, 75–82. [Google Scholar] [CrossRef]
- Tseng, H.Y.; Wei, Y.L.; Chen, A.L.; Wu, H.P.; Hsu, H.; Tsai, H.M. Characterizing link asymmetry in vehicle-to-vehicle Visible Light Communications. In Proceedings of the 2015 IEEE Vehicular Networking Conference (VNC), Kyoto, Japan, 16–18 December 2015; pp. 88–95. [Google Scholar] [CrossRef]
- Cui, Z.; Wang, C.; Tsai, H. Characterizing channel fading in vehicular visible light communications with video data. In Proceedings of the 2014 IEEE Vehicular Networking Conference (VNC), Paderborn, Germany, 3–5 December 2014; pp. 226–229. [Google Scholar] [CrossRef]
- Wu, L.; Tsai, H. Modeling vehicle-to-vehicle visible light communication link duration with empirical data. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1103–1109. [Google Scholar] [CrossRef]
- Li, J.; Zhao, Y.; Zhang, J.; Jiang, R.; Tao, C.; Tan, Z. Radio channel measurements and analysis at 2.4/5GHz in subway tunnels. China Commun. 2015, 12, 36–45. [Google Scholar] [CrossRef]
- Hrovat, A.; Guan, K.; Javornik, T. Traffic impact on radio wave propagation at millimeter-wave band in tunnels for 5G communications. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 2903–2906. [Google Scholar] [CrossRef]
- Wang, F.; Wang, Z.; Qian, C.; Dai, L.; Yang, Z. Efficient vertical handover scheme for heterogeneous VLC-RF systems. J. Opt. Commun. Netw. 2015, 7, 1172–1180. [Google Scholar] [CrossRef]
- Demir, M.S.; Eldeeb, H.B.; Uysal, M. CoMP-Based Dynamic Handover for Vehicular VLC Networks. IEEE Commun. Lett. 2020, 24, 2024–2028. [Google Scholar] [CrossRef]
- Yoon, S.H.; Lee, K.S.; Cha, J.S.; Mariappan, V.; Young, K.E.; Woo, D.G.; Kim, J.U. IEEE Standard for Local and metropolitan area networks—Part 15.7: Short-Range Optical Wireless Communications. IEEE Std. 2019, 1–407. [Google Scholar] [CrossRef]
- Paasch, C.; Detal, G.; Duchene, F.; Raiciu, C.; Bonaventure, O. Exploring Mobile/WiFi Handover with Multipath TCP. In Proceedings of the 2012 ACM SIGCOMM Workshop on Cellular Networks: Operations, Challenges, and Future Design; Association for Computing Machinery: New York, NY, USA, 2012; pp. 31–36. [Google Scholar] [CrossRef]
- Stevens-Navarro, E.; Wong, V. Comparison between Vertical Handoff Decision Algorithms for Heterogeneous Wireless Networks. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; Volume 2, pp. 947–951. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Li, H. An MDP-based vertical handoff decision algorithm for heterogeneous wireless networks. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Kassab, M.; Bonnin, J.M.; Belghith, A. Fast and Secure Handover in WLANs: An Evaluation of the Signaling Overhead. In Proceedings of the 2008 5th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 10–12 January 2008; pp. 770–775. [Google Scholar] [CrossRef]
- Hamza, E.B.; Kimura, S. A Scalable SDN-EPC Architecture Based on OpenFlow-Enabled Switches to Support Inter-domain Handover. In Proceedings of the 2016 10th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Fukuoka, Japan, 6–8 July 2016; pp. 272–277. [Google Scholar] [CrossRef]
- Demir, M.S.; Miramirkhani, F.; Uysal, M. Handover in VLC networks with coordinated multipoint transmission. In Proceedings of the 2017 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), Istanbul, Turkey, 5–8 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Sur, A.; Sicker, D. Multi layer rules based framework for vertical handoff. In Proceedings of the 2nd International Conference on Broadband Networks, Boston, MA, USA, 7 October 2005; Volume 1, pp. 571–580. [Google Scholar] [CrossRef]
- Da Costa Silva, K.; Becvar, Z.; Frances, C.R.L. Adaptive Hysteresis Margin Based on Fuzzy Logic for Handover in Mobile Networks with Dense Small Cells. IEEE Access 2018, 6, 17178–17189. [Google Scholar] [CrossRef]
- Inzerilli, T.; Vegni, A.M.; Neri, A.; Cusani, R. A Location-Based Vertical Handover Algorithm for Limitation of the Ping-Pong Effect. In Proceedings of the 2008 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Avignon, France, 12–14 October 2008; pp. 385–389. [Google Scholar] [CrossRef]
- Choi, H.H.; Lim, J.B.; Hwang, H.; Jang, K. Optimal Handover Decision Algorithm for Throughput Enhancement in Cooperative Cellular Networks. In Proceedings of the 2010 IEEE 72nd Vehicular Technology Conference-Fall, Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Becvar, Z.; Cheng, R.G.; Charvat, M. Mobility management for D2D communication combining radio frequency and visible light communications bands. Wirel. Netw. 2020, 62, 5473–5484. [Google Scholar] [CrossRef]
- Liu, R.; Zhang, C. Dynamic dwell timer for vertical handover in VLC-WLAN heterogeneous networks. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 1256–1260. [Google Scholar] [CrossRef]
- Wu, X.; Haas, H. Handover Skipping for LiFi. IEEE Access 2019, 7, 38369–38378. [Google Scholar] [CrossRef]
- Tran, C.N.; Hoang, T.M.; Nguyen, N.H. Proactive link handover deploying coordinated transmission for indoor visible light communications (VLC) networks. J. Opt. Commun. 2020. [Google Scholar] [CrossRef]
- Chiang, M.S.; Kuo, Y.L. An Improved Fast Handover Control Scheme over the Wireless Networks. In Proceedings of the 2015 Third International Conference on Robot, Vision and Signal Processing (RVSP), Kaohsiung, Taiwan, 18–20 November 2015; pp. 306–309. [Google Scholar] [CrossRef]
- Prados-Garzon, J.; Adamuz-Hinojosa, O.; Ameigeiras, P.; Ramos-Munoz, J.J.; Andres-Maldonado, P.; Lopez-Soler, J.M. Handover implementation in a 5G SDN-based mobile network architecture. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, J.; Yoo, Y. Handover cell selection using user mobility information in a 5G SDN-based network. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 697–702. [Google Scholar] [CrossRef]
- Lee, J.M.; Yu, M.J.; Yoo, Y.H.; Choi, S.G. A New Scheme of Global Mobility Management for Inter-VANETs Handover of Vehicles in V2V/V2I Network Environments. In Proceedings of the 2008 Fourth International Conference on Networked Computing and Advanced Information Management, Gyeongju, Korea, 2–4 September 2008; Volume 2, pp. 114–119. [Google Scholar] [CrossRef]
- Tsourdos, S.; Michalas, A.; Sgora, A.; Vergados, D.D. Enhanced fast handovers for PMIPv6 in vehicular environments. In Proceedings of the IISA 2014, the 5th International Conference on Information, Intelligence, Systems and Applications, Chania, Greece, 7–9 July 2014; pp. 420–425. [Google Scholar] [CrossRef]
- Farahbakhsh, R.; Sorooshi, M. Cross layering design of IPv6 Fast handover in mobile WiMAX. In Proceedings of the 2010 17th International Conference on Telecommunications, Doha, Qatar, 4–7 April 2010; pp. 304–308. [Google Scholar] [CrossRef]
- Kang, J.E.; Kum, D.W.; Li, Y.; Cho, Y.Z. Seamless Handover Scheme for Proxy Mobile IPv6. In Proceedings of the 2008 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Avignon, France, 12–14 October 2008; pp. 410–414. [Google Scholar] [CrossRef]
- Hasan, S.F. A discussion on software-defined handovers in Hierarchical MIPv6 networks. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 140–144. [Google Scholar] [CrossRef]
- Dias, J.; Cardote, A.; Neves, F.; Sargento, S.; Oliveira, A. Seamless horizontal and vertical mobility in VANET. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012; pp. 226–233. [Google Scholar] [CrossRef]
- Jarchlo, E.A.; Kouhini, S.M.; Doroud, H.; Maierbacher, G.; Jung, M.; Siessegger, B.; Ghassemlooy, Z.; Zubow, A.; Caire, G. Flight: A Flexible Light Communications network architecture for indoor environments. In Proceedings of the 2019 15th International Conference on Telecommunications (ConTEL), Graz, Austria, 3–5 July 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Jarchlo, E.A.; Eso, E.; Doroud, H.; Zubow, A.; Dressler, F.; Ghassemlooy, Z.; Siessegger, B.; Caire, G. FDLA: A Novel Frequency Diversity and Link Aggregation Solution for Handover in an Indoor Vehicular VLC Network. IEEE Trans. Netw. Serv. Manag. 2021, 1. [Google Scholar] [CrossRef]
- Pfefferkorn, D.; Helmholdt, K.; Blume, H. Performance estimation of indoor optical wireless communication systems using OMNeT++. In Proceedings of the 2017 IEEE 22nd International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Lund, Sweden, 19–21 June 2017; pp. 1–5. [Google Scholar]
- Aldalbahi, A.; Rahaim, M.; Khreishah, A.; Ayyash, M.; Little, T.D.C. Visible Light Communication Module: An Open Source Extension to the ns3 Network Simulator with Real System Validation. IEEE Access 2017, 5, 22144–22158. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Y.; Lin, Y.; Huang, S. Full-duplex MAC protocol based on adaptive contention window for visible light communication. IEEE/OSA J. Opt. Commun. Netw. 2015, 7, 164–171. [Google Scholar] [CrossRef]
- Ley-Bosch, C.; Alonso-González, I.; Sanchez-Rodriguez, D.; Ramírez-Casañas, C. Evaluation of the Effects of Hidden Node Problems in IEEE 802.15.7 Uplink Performance. Sensors 2016, 16, 126. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.; Zhou, X.; She, Y.; Huang, L. An enhanced slotted CSMA/CA algorithm based on data aggregation for IEEE802.15.4 in wireless sensor network. In Proceedings of the 2014 4th IEEE International Conference on Information Science and Technology, Shenzhen, China, 26–28 April 2014; pp. 635–639. [Google Scholar]
- Dissanayake, S.D.; Armstrong, J. Comparison of ACO-OFDM, DCO-OFDM and ADO-OFDM in IM/DD Systems. J. Light. Technol. 2013, 31, 1063–1072. [Google Scholar] [CrossRef]
- Rodríguez, S.P.; Jiménez, R.P.; Mendoza, B.R.; Hernández, F.J.L.; Alfonso, A.J.A. Simulation of impulse response for indoor visible light communications using 3D CAD models. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Torres-Zapata, E.; Guerra, V.; Rabadan, J.; Perez-Jimenez, R.; Martin Luna-Rivera, J. Channel characterization of full-duplex VLC system for urban tunnels. In Proceedings of the 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Torres-Zapata, E.; Guerra, V.; Rabadan, J.; Perez-Jimenez, R.; Luna-Rivera, J.M. Vehicular Communications in Tunnels using VLC. In Proceedings of the 2019 15th International Conference on Telecommunications (ConTEL), Graz, Austria, 3–5 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Torres-Zapata, E.; Guerra, V.; Borges, J.R.; Luna-Rivera, J.M.; Perez-Jimenez, R. VLC network topology design for seamless communication in a urban tunnel. In Proceedings of the Manuscript Accepted for Publication at 17th International Symposium on Wireless Communication System 2021 (ISWCS), Berlin, Germany, 6–9 September 2021. [Google Scholar]
- Kim, C.M.; Choi, S.I.; Koh, S.J. IDMP-VLC: IoT device management protocol in visible light communication networks. In Proceedings of the 2017 19th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 19–22 February 2017; pp. 578–583. [Google Scholar] [CrossRef]
- Adrian, W.; Jobanputra, R. Influence of Pavement Reflectance on Lighting for Parking Lots; Portland Cement Association: Skokie, IL, USA, 2005. [Google Scholar]
- Torres-Zapata, E.; Guerra, V.; Rabadan, J.; Luna-Rivera, M.; Perez-Jimenez, R. MAC/PHY Comprehensive Visible Light Communication Networks Simulation. Sensors 2020, 20, 6014. [Google Scholar] [CrossRef] [PubMed]
- Jeremy Hung, C.; John Wisniewski, P. Technical Manual for Design and Construction of Road Tunnels—Civil Elements; Standard; U.S. Department of Transportation Publication Federal Highway Administration (FHWA): Madrid, Spain, 2009.
- Dirección General de Industria, Energía y Minas de Madrid. Guia de Iluminación en Tuneles e Infraestructuras Subterraneas; Standard; Consejería de Economía y Hacienda de Madrid: Madrid, Spain, 2015.
- Cailean, A.M.; Cagneau, B.; Chassagne, L.; Popa, V.; Dimian, M. A survey on the usage of DSRC and VLC in communication-based vehicle safety applications. In Proceedings of the 2014 IEEE 21st Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Delft, The Netherlands, 10 November 2014; pp. 69–74. [Google Scholar] [CrossRef]
- Bin Ali Wael, C.; Armi, N.; Mitayani, A.; Kurniawan, D.; Suryadi Satyawan, A.; Subekti, A. Analysis of IEEE 802.11p MAC Protocol for Safety Message Broadcast in V2V Communication. In Proceedings of the 2020 International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications (ICRAMET), Tangerang, Indonesia, 18–20 November 2020; pp. 320–324. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Resposivity | 0.2 A/W | q electron charge | C |
| receiver dark current | 0.562 | background current | A |
| B Noise Bandwidth | 300,000 b/s | dark current | 10 nA |
| G Open Loop Voltage Gain | 10 | Fixed capacitance | 112 pF/cm2 |
| Temperature absolute | 298 | FET channel noise factor | 1.5 |
| Noise Bandwidth Factor | 0.0868 | FET transconductance | 30 mS |
| Noise Bandwidth Factor | 0.562 | k Boltzmann’s Constant | J/K |
| Paramaters | Value | Parameters | Value |
|---|---|---|---|
| Phy Layer | |||
| Optical Clock | 60 MHz | Headlamp power | 15 watts |
| AP Separation | 8–15 m | Tunnel Lumminary power | 50 watts |
| Vehicel speed | 80 km/h | Receiver area | 1 mm2 |
| Modulation | OOK | Run-length limited | 8b10b |
| PHY mode | II | Forward Error Correction | none |
| Rx FOV | 60° | Lens | No |
| Radiation Pattern | See Figure 15 | MMC number of ray | 50,000 |
| Reflection coefficient concrete | 0.17 | Bound per ray | 3 |
| Reflection coefficient asphalt | 0.07 | Channel update | 1 ms |
| MAC Layer | |||
| Frame Header | 207 bits | BO, SO | 5,7 |
| Signaling message size | 500 bits | User Throughtput | 450 Kbps |
| aBackoffUnit | 200 | Frame payload | 1000 bits |
| aBaseSuperframeDuration | 60 | Number of backoff max | 5 |
| Handover | |||
| THDL | 19 dB | Recovery time | 40 ms |
| THUL max | 75 dB | Disconnection time | 300 ms |
| THUL min | 50 dB | Association latency | 200 ms |
| Time-to-Trigger | 10 ms | Handover latency | 2 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres-Zapata, E.; Guerra, V.; Rabadan, J.; Luna-Rivera, M.; Perez-Jimenez, R. VLC Network Design for High Mobility Users in Urban Tunnels. Sensors 2022, 22, 88. https://doi.org/10.3390/s22010088
Torres-Zapata E, Guerra V, Rabadan J, Luna-Rivera M, Perez-Jimenez R. VLC Network Design for High Mobility Users in Urban Tunnels. Sensors. 2022; 22(1):88. https://doi.org/10.3390/s22010088
Chicago/Turabian StyleTorres-Zapata, Edmundo, Victor Guerra, Jose Rabadan, Martin Luna-Rivera, and Rafael Perez-Jimenez. 2022. "VLC Network Design for High Mobility Users in Urban Tunnels" Sensors 22, no. 1: 88. https://doi.org/10.3390/s22010088