
Recent Development of Flexible Tactile Sensors and Their Applications


Abstract
:1. Introduction
2. Working Mechanism of the Tactile Sensor
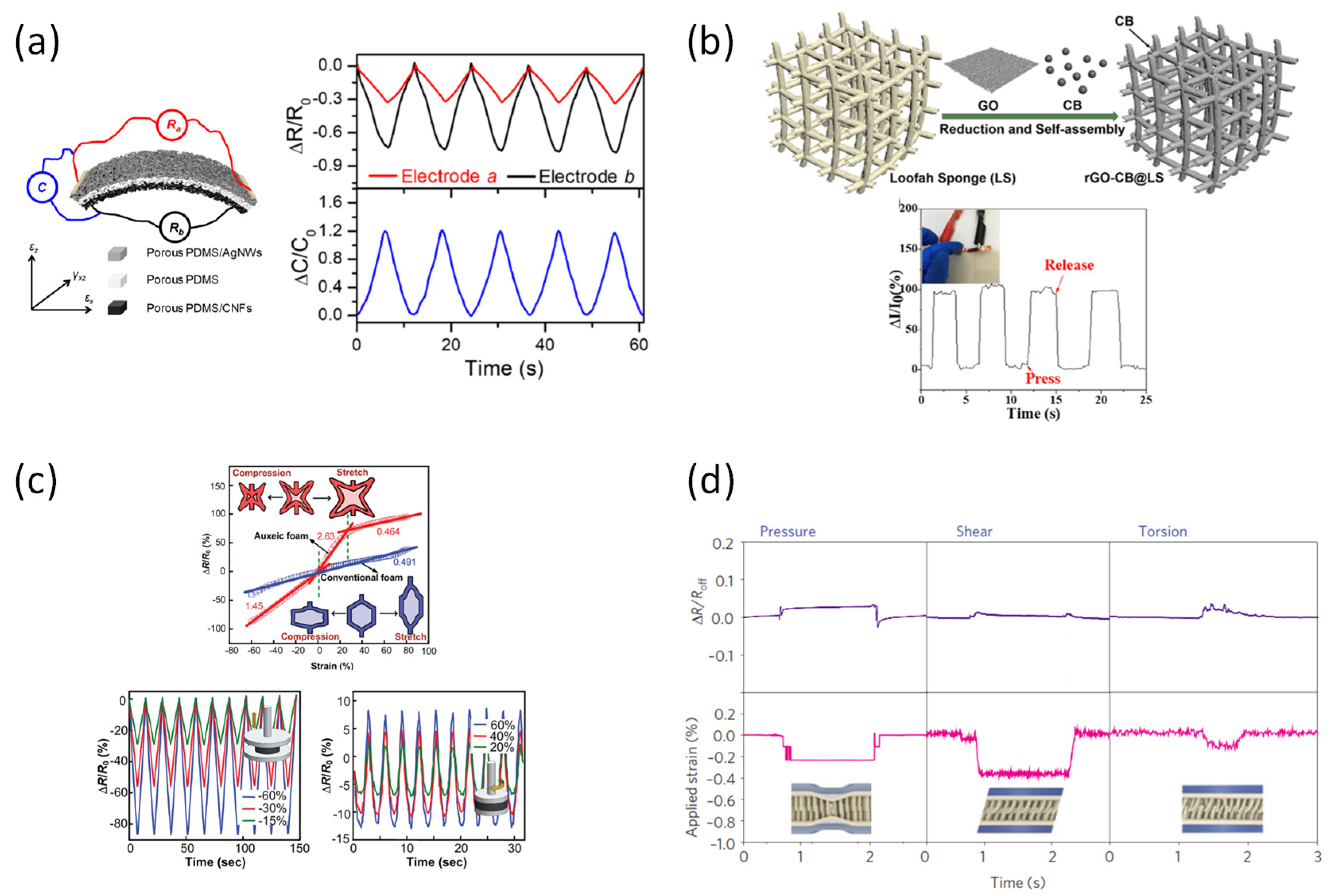
2.1. The Piezoresistive Effect-Based Tactile Sensor
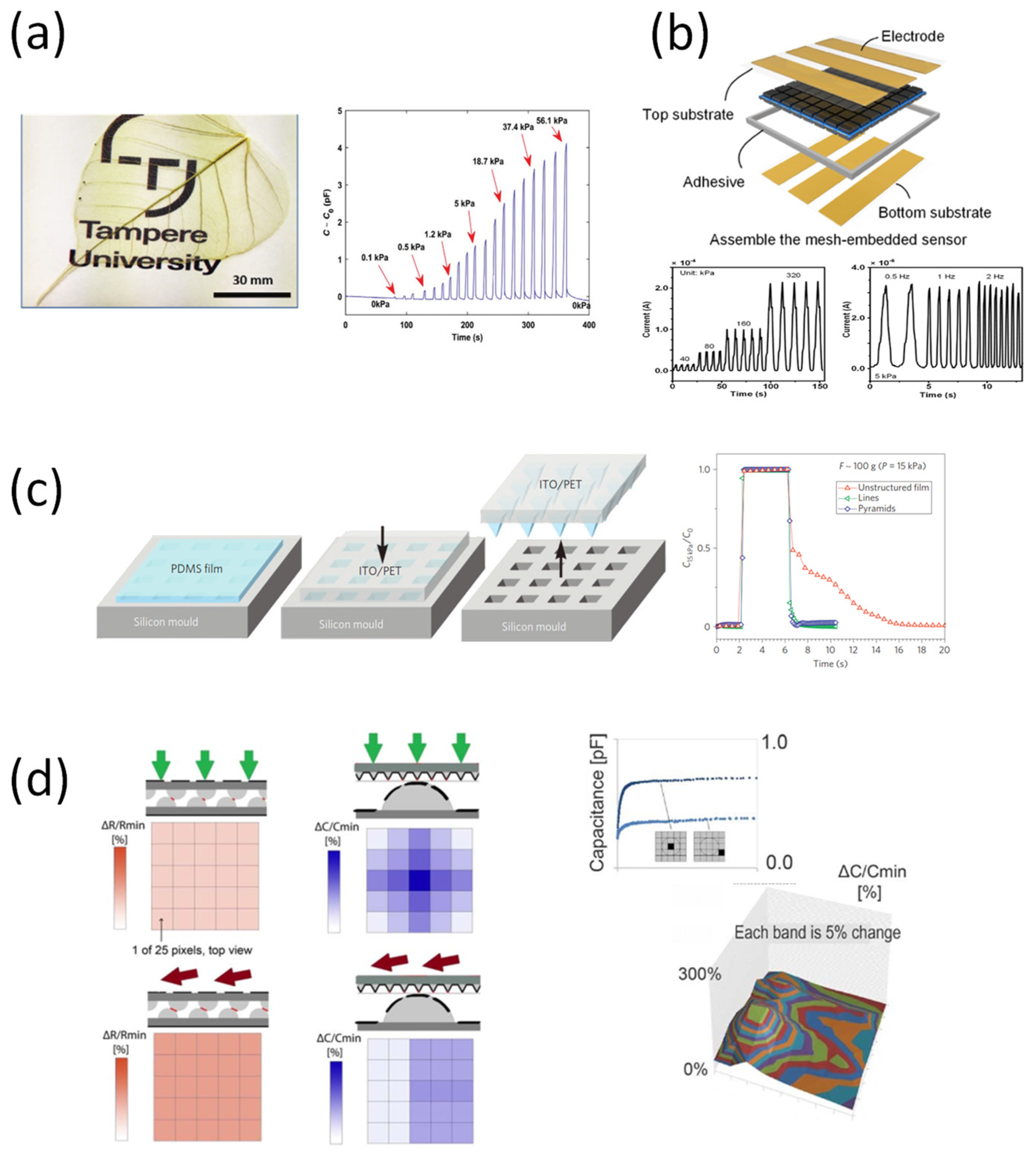
2.2. The Piezocapacitive Effect-Based Tactile Sensor


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Structure | Application | Sensitivity | Advantage | Ref. |
|---|---|---|---|---|---|
| 3D fabric | Planar fabric | Tactile system for robots | (0.86–2.50) fF kPa−1 | Very sensitivity | [78] |
| Graphene | Planar | Pressor sensor array | 6.55% kPa−1 | Long time stability, position mapping, high resolution | [79] |
| AgNF-AgNW 1 and SiO2 | Fiber | Pressor sensor array | 1.78 × 10−3 ~9.65 × 10−5 kPa−1 | Transparent, position mapping, high resolution | [80] |
| PDMS/Ecoflex 2 | Planar/shoe sole | Plantar pressure sensor in shoes | 6.8% N−1 | Wearable, high sensibility, wide measure range | [81] |
| PDMS/Ecoflex | Planar/ pump bottom | Normal and shear force sensor | (2.5–3.0)% mN−1 | High sensitivity, position mapping | [82] |
| Ag NWs/ PDMS/CPI 3 | Lotus mold substrate/ AgNWs electrode | Tactile sensor for e-skin | 1.2 kPa−1 | Flexible, high sensitivity, high aspect ratio | [83] |
| Ionic liquid 4 | Planar | 3D force sensor | 29.8 nF N−1 | Be able to measure three-dimensional contact force | [84] |
| Ag/Ecoflex | Planar | Static and dynamic strain mapping | 1.45 MPa−1 | Wearable, dynamic strain mapping | [85] |
2.3. The Piezoelectric Effect-Based Tactile Sensor
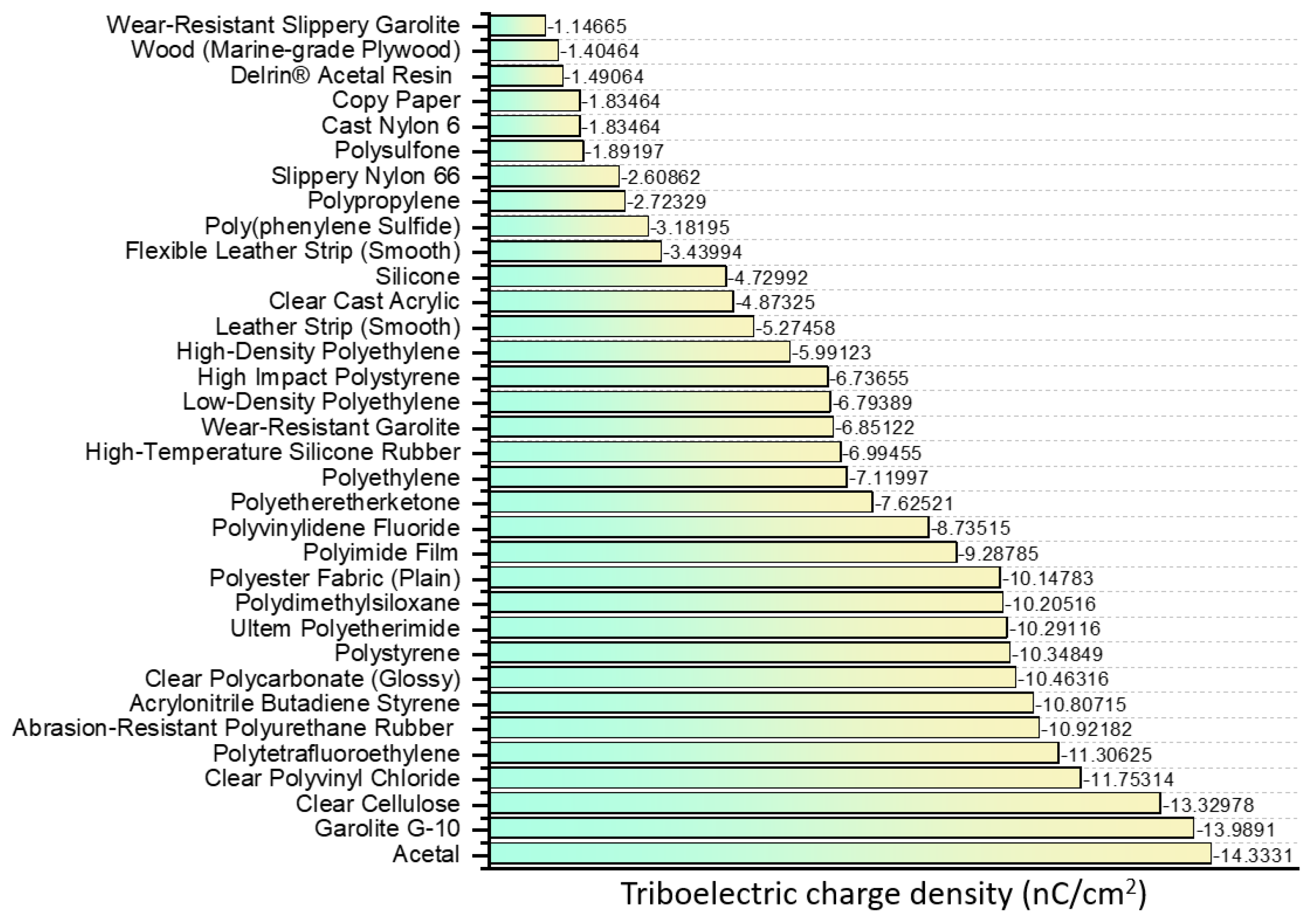
2.4. The Triboelectric Effect-Based Tactile Sensor
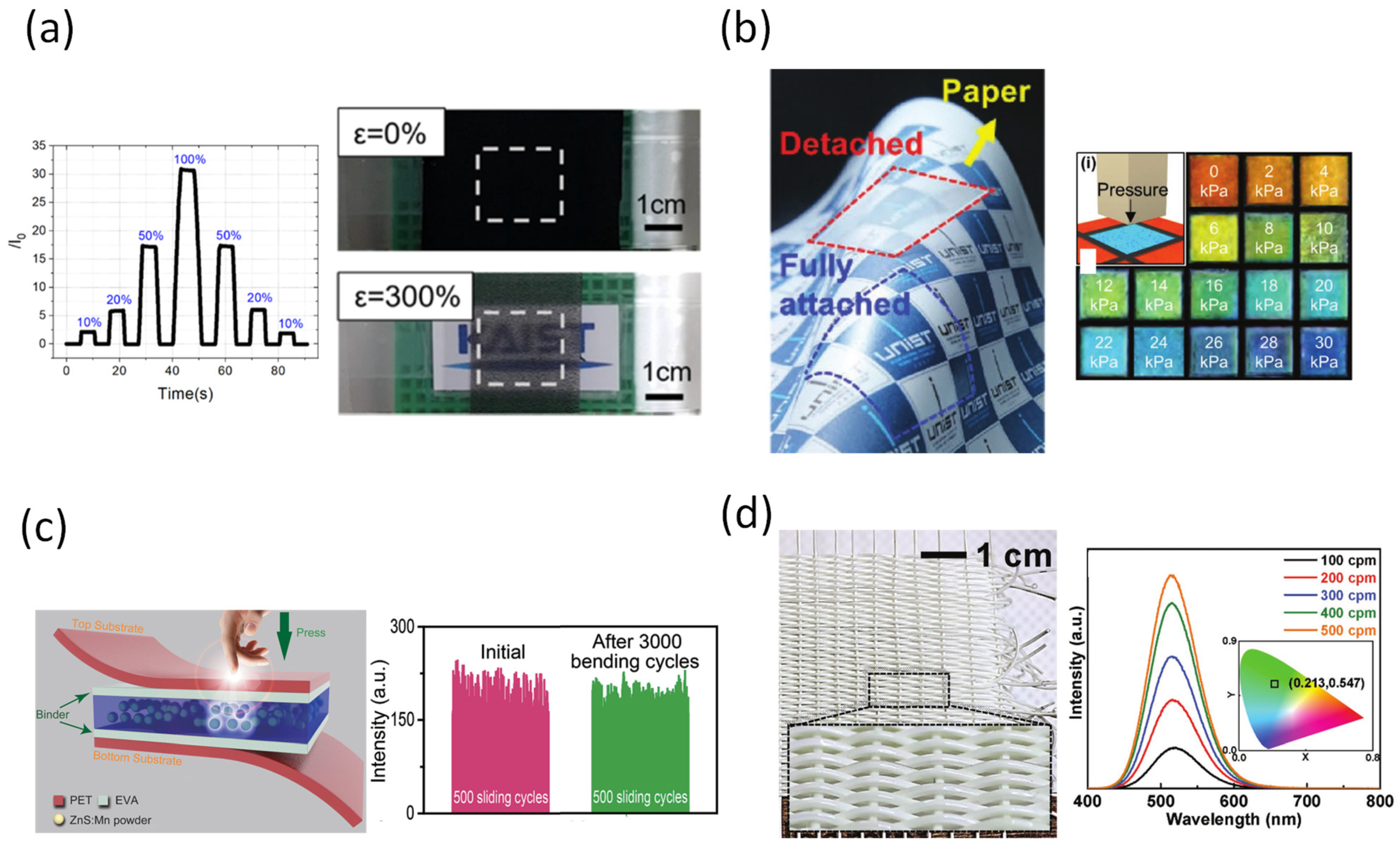
2.5. Optical Tactile Sensor
| Material | Structure | Application | Sensitivity | Advantage | Ref. |
|---|---|---|---|---|---|
| poly(MAA-co-EDMA) 1 | Monolithic Column | Detection and quantification of endogenous | N/A | No power source required | [135] |
| PDMS/ZnS:Mn | Multi array/ Pyramid | Pressor sensor | 0.037~6 MPa−1 | No power source required, high accuracy | [136] |
| CaZn1–xMnxOS | Solid state | Color manipulation | N/A | High accuracy, good sensitivity | [137] |
| CaZnOS:Nd3+/epoxy | Composite disk | Force sensing | 0~1000 N (Unknow minimum) | High accuracy, good sensitivity, fast respond time | [138] |
| Ca2Nb2Ox:Pr3+ PVA 2 | Pellets | Stress sensor | N/A | High accuracy | [139] |
| Ecoflex-ZnS PAM 3-LiCl | Planar | Pressor sensor | N/A | Stretchability, high accuracy | [140] |
| Electroluminescent | Fiber | Brain-interfaced communication | N/A | Stretchability, can show three color | [141] |
| ZnS PDMS | Planar | Stress sensor | N/A | Stretchable | [142] |
3. Applications
3.1. Motion Sensing-Robotic

3.2. Health Care
3.3. Artificial Intelligence
4. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sorabji, R. Aristotle on Demarcating the Five Senses. Philos. Rev. 1971, 80, 55–79. [Google Scholar] [CrossRef]
- Stevens, J.C.; Green, B.G. Chapter 1–History of Research on Touch. In Pain and Touch; Kruger, L., Ed.; Academic Press: San Diego, CA, USA, 1996; pp. 1–23. [Google Scholar]
- Dargahi, J.; Najarian, S. Human tactile perception as a standard for artificial tactile sensing—A review. Int. J. Med. Robot. 2004, 1, 23–35. [Google Scholar] [CrossRef] [PubMed]
- Belzile, B.; Birglen, L. Optimal Design of Self-Adaptive Fingers for Proprioceptive Tactile Sensing. J. Mech. Robot. 2017, 9, 051004. [Google Scholar] [CrossRef]
- Jeon, S. Flexible Multimodal Sensors for Electronic Skin: Principle, Materials, Device, Array Architecture, and Data Acquisition Method. Proc. IEEE 2019, 107, 2065–2083. [Google Scholar] [CrossRef]
- Cosseddu, P. Tactile sensors with integrated piezoelectric polymer and low voltage organic thin-film transistors. In Proceedings of the Sensors, 2014 IEEE, Valencia, Spain, 2–5 November 2014; pp. 1734–1736. [Google Scholar]
- Chen, H. Electronic Skins for Healthcare Monitoring and Smart Prostheses. Annu. Rev. Control 2021, 4, 629–650. [Google Scholar] [CrossRef]
- Weerasinghe, L.; Chathuranga, D.S. Development and Characterization of a Soft Tactile Sensor Array Used for Parallel Grippers. In Proceedings of the MERCon 2018: 4th International Multidisciplinary Engineering Research Conference, Moratuwa, Sri Lanka, 30 May–1 June 2018; pp. 102–107. [Google Scholar]
- Tiwana, M.I. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuat. A Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Dahiya, R.S. Directions Toward Effective Utilization of Tactile Skin: A Review. IEEE Sens. J. 2013, 13, 4121–4138. [Google Scholar] [CrossRef]
- Almassri, A.M. Pressure Sensor: State of the Art, Design, and Application for Robotic Hand. J. Sens. 2015, 2015, 846487. [Google Scholar] [CrossRef] [Green Version]
- Fu, X. A high-resolution, ultrabroad-range and sensitive capacitive tactile sensor based on a CNT/PDMS composite for robotic hands. Nanoscale 2021, 13, 18780–18788. [Google Scholar] [CrossRef]
- Nguyen, T.D. Highly sensitive flexible proximity tactile array sensor by using carbon micro coils. Sens. Actuat. A Phys. 2017, 266, 166–177. [Google Scholar] [CrossRef]
- Liu, H. Lightweight, Superelastic, and Hydrophobic Polyimide Nanofiber /MXene Composite Aerogel for Wearable Piezoresistive Sensor and Oil/Water Separation Applications. Adv. Funct. Mater. 2021, 31, 2008006. [Google Scholar] [CrossRef]
- Wu, J. Extremely Deformable, Transparent, and High-Performance Gas Sensor Based on Ionic Conductive Hydrogel. ACS Appl. Mater. Interfaces 2019, 11, 2364–2373. [Google Scholar] [CrossRef]
- Wang, T. A Self-Healable, Highly Stretchable, and Solution Processable Conductive Polymer Composite for Ultrasensitive Strain and Pressure Sensing. Adv. Funct. Mater. 2018, 28, 1705551. [Google Scholar] [CrossRef]
- Han, S. Dual Conductive Network Hydrogel for a Highly Conductive, Self-Healing, Anti-Freezing, and Non-Drying Strain Sensor. ACS Appl. Polym. Mater. 2020, 2, 996–1005. [Google Scholar] [CrossRef]
- Takei, K. Highly sensitive electronic whiskers based on patterned carbon nanotube and silver nanoparticle composite films. Proc. Natl. Acad. Sci. USA 2014, 111, 1703–1707. [Google Scholar] [CrossRef] [Green Version]
- Zang, Y. A Dual-Organic-Transistor-Based Tactile-Perception System with Signal-Processing Functionality. Adv. Mater. 2017, 29, 1606088. [Google Scholar] [CrossRef]
- Choi, E. Highly Sensitive Tactile Shear Sensor Using Spatially Digitized Contact Electrodes. Sensors 2019, 19, 1300. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, D. A Highly Sensitive Tactile Sensor Using a Pyramid-Plug Structure for Detecting Pressure, Shear Force, and Torsion. Adv. Mater. Technol. 2018, 4, 1800284. [Google Scholar] [CrossRef]
- Kweon, O.Y. Wearable high-performance pressure sensors based on three-dimensional electrospun conductive nanofibers. NPG Asia Mater. 2018, 10, 540–551. [Google Scholar] [CrossRef]
- Wu, C. A new approach for an ultrasensitive tactile sensor covering an ultrawide pressure range based on the hierarchical pressure-peak effect. Nanoscale Horiz. 2020, 5, 541–552. [Google Scholar] [CrossRef]
- Zhu, L. Development of Fully Flexible Tactile Pressure Sensor with Bilayer Interlaced Bumps for Robotic Grasping Applications. Micromachines 2020, 11, 770. [Google Scholar] [CrossRef]
- Alfadhel, A. A Magnetoresistive Tactile Sensor for Harsh Environment Applications. Sensors 2016, 16, 650. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, K.-H. A tactile sensing array integrated with tension sensor for continuously monitoring blood pulse waves. Microelectron. Eng. 2019, 218, 111132. [Google Scholar] [CrossRef]
- Kim, Y. A bioinspired flexible organic artificial afferent nerve. Science 2018, 360, 998–1003. [Google Scholar] [CrossRef] [Green Version]
- Valkanis, A. Efficient Resource Allocation in Tactile-Capable Ethernet Passive Optical Healthcare LANs. IEEE Access 2020, 8, 52981–52995. [Google Scholar] [CrossRef]
- Gupta, R. Tactile-Internet-Based Telesurgery System for Healthcare 4.0: An Architecture, Research Challenges, and Future Directions. IEEE Netw. 2019, 33, 22–29. [Google Scholar] [CrossRef]
- Wong, E. Tactile internet capable passive optical LAN for healthcare. In Proceedings of the 2016 21st OptoElectronics and Communications Conference (OECC) Held Jointly with 2016 International Conference on Photonics in Switching (PS), Niigata, Japan, 3–7 July 2016; pp. 1–3. [Google Scholar]
- Ntagios, M. Robotic Hands with Intrinsic Tactile Sensing via 3D Printed Soft Pressure Sensors. Adv. Intell. Syst. 2020, 2, 1900080. [Google Scholar] [CrossRef] [Green Version]
- Navaraj, W.; Dahiya, R. Fingerprint-Enhanced Capacitive-Piezoelectric Flexible Sensing Skin to Discriminate Static and Dynamic Tactile Stimuli. Adv. Intell. Syst. 2019, 1, 1900051. [Google Scholar] [CrossRef]
- Jin, T. Triboelectric nanogenerator sensors for soft robotics aiming at digital twin applications. Nat. Commun. 2020, 11, 5381. [Google Scholar] [CrossRef] [PubMed]
- Hidalgo-López, J.A. New Approaches for Increasing Accuracy in Readout of Resistive Sensor Arrays. IEEE Sens. J. 2017, 17, 2154–2164. [Google Scholar] [CrossRef]
- Vidal-Verdú, F. Three Realizations and Comparison of Hardware for Piezoresistive Tactile Sensors. Sensors 2011, 11, 3249–3266. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drimus, A. Design of a flexible tactile sensor for classification of rigid and deformable objects. Robot. Auton. Syst. 2014, 62, 3–15. [Google Scholar] [CrossRef]
- Fiorillo, A.S. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuat. A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- Cookson, J.W. Theory of the Piezo-Resistive Effect. Phys. Rev. 1935, 47, 194–195. [Google Scholar] [CrossRef]
- Martin, D.T. A Micromachined Dual-Backplate Capacitive Microphone for Aeroacoustic Measurements. J. Microelectromech. Syst. 2007, 16, 1289–1302. [Google Scholar] [CrossRef]
- Huang, J. Piezocapacitive effect of a sandwich structure in a microfabricated cantilever. In Proceedings of the 2010 IEEE 23rd International Conference on Micro Electro Mechanical Systems (MEMS), Hong Kong, China, 24–28 January 2010; pp. 564–567. [Google Scholar]
- Gautschi, G. Piezoelectric Sensorics; Springer: Berlin/Heidelberg, Germany, 2002; 264p. [Google Scholar]
- Birkholz, M. Crystal-field induced dipoles in heteropolar crystals II: Physical significance. Phys. B Condens. Matter 1995, 96, 333–340. [Google Scholar] [CrossRef]
- Moheimani, S.O.R.; Fleming, A.J. Fundamentals of Piezoelectricity. In Piezoelectric Transducers for Vibration Control and Damping; Springer: London, UK, 2006; pp. 9–35. [Google Scholar]
- Niu, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef] [Green Version]
- Ye, B.U. Electrospun ion gel nanofibers for flexible triboelectric nanogenerator: Electrochemical effect on output power. Nanoscale 2015, 7, 16189–16194. [Google Scholar] [CrossRef]
- Pan, S.; Zhang, Z. Fundamental theories and basic principles of triboelectric effect: A review. Friction 2019, 7, 2–17. [Google Scholar] [CrossRef]
- Cheng, T. The Current Development and Future Outlook of Triboelectric Nanogenerators: A Survey of Literature. Adv. Mater. Technol. 2019, 4, 1800588. [Google Scholar] [CrossRef]
- Shao, J. Theoretical modeling of triboelectric nanogenerators (TENGs). J. Appl. Phys. 2020, 128, 111101. [Google Scholar] [CrossRef]
- Arthurs, D.; Ziada, S. Flow-excited acoustic resonances of coaxial side-branches in an annular duct. J. Fluids Struct. 2009, 25, 42–59. [Google Scholar] [CrossRef]
- Peng, S. Multimodal Capacitive and Piezoresistive Sensor for Simultaneous Measurement of Multiple Forces. ACS Appl. Mater. Interfaces 2020, 12, 22179–22190. [Google Scholar] [CrossRef] [PubMed]
- Cao, M. CB Nanoparticles Optimized 3D Wearable Graphene Multifunctional Piezoresistive Sensor Framed by Loofah Sponge. ACS Appl. Mater. Interfaces 2020, 12, 36540–36547. [Google Scholar] [CrossRef]
- Li, Y. Poisson Ratio and Piezoresistive Sensing: A New Route to High-Performance 3D Flexible and Stretchable Sensors of Multimodal Sensing Capability. Adv. Funct. Mater. 2016, 26, 2900–2908. [Google Scholar] [CrossRef]
- Pang, C. A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofibres. Nat. Mater. 2012, 11, 795–801. [Google Scholar] [CrossRef]
- Damilano, A. Commercial tactile sensors for hand exoskeletons: Practical considerations for ultra-low cost and very-low complexity read-out. IEEE Instrum. Meas. Mag. 2016, 19, 49–56. [Google Scholar] [CrossRef]
- Engel, J. Polymer micromachined multimodal tactile sensors. Sens. Actuat. A Phys. 2005, 117, 50–61. [Google Scholar] [CrossRef]
- Engel, J. Strain sensitivity enhancement of thin metal film strain gauges on polymer microscale structures. Appl. Phys. Lett. 2006, 89, 221907. [Google Scholar] [CrossRef]
- Rogers, J.A. Materials and Mechanics for Stretchable Electronics. Science 2010, 327, 1603–1607. [Google Scholar] [CrossRef] [Green Version]
- Coskun, M.B. Detecting Subtle Vibrations Using Graphene-Based Cellular Elastomers. ACS Appl. Mater. Interfaces 2017, 9, 11345–11349. [Google Scholar] [CrossRef]
- Shang, S. Piezoresistive strain sensing of carbon black /silicone composites above percolation threshold. Rev. Sci. Instrum. 2016, 87, 123910. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.S.; Pant, B.D. Polysilicon thin film piezoresistive pressure microsensor: Design, fabrication and characterization. Microsyst. Technol. 2015, 21, 1949–1958. [Google Scholar] [CrossRef]
- Zhang, S. Piezoresistive silicon nanowire based nanoelectromechanical system cantilever air flow sensor. Appl. Phys. Lett. 2012, 100, 023111. [Google Scholar] [CrossRef]
- Zang, X. Unprecedented sensitivity towards pressure enabled by graphene foam. Nanoscale 2017, 9, 19346–19352. [Google Scholar] [CrossRef]
- Khan, F.A. Silver Nanoflower Decorated Graphene Oxide Sponges for Highly Sensitive Variable Stiffness Stress Sensors. Small 2018, 14, 1800549. [Google Scholar] [CrossRef]
- Liu, W. Piezoresistive Pressure Sensor Based on Synergistical Innerconnect Polyvinyl Alcohol Nanowires/Wrinkled Graphene Film. Small 2018, 14, 1704149. [Google Scholar] [CrossRef]
- Wang, X. Silk-Molded Flexible, Ultrasensitive, and Highly Stable Electronic Skin for Monitoring Human Physiological Signals. Adv. Mater. 2014, 26, 1336–1342. [Google Scholar] [CrossRef] [PubMed]
- Lee, S. A transparent bending-insensitive pressure sensor. Nat. Nanotechol. 2016, 11, 472–478. [Google Scholar] [CrossRef]
- Wang, L. PDMS/MWCNT-based tactile sensor array with coplanar electrodes for crosstalk suppression. Microsyst. Nanoeng. 2016, 2, 16065. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hammock, M.L. 25th anniversary article: The evolution of electronic skin (e-skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef]
- Elsayes, A. Plant-Based Biodegradable Capacitive Tactile Pressure Sensor Using Flexible and Transparent Leaf Skeletons as Electrodes and Flower Petal as Dielectric Layer. Adv. Sustain. Syst. 2020, 4, 2000056. [Google Scholar] [CrossRef]
- James, S.; Contractor, R. Study on Nature-inspired Fractal Design-based Flexible Counter Electrodes for Dye-Sensitized Solar Cells Fabricated using Additive Manufacturing. Sci. Rep. 2018, 8, 17032. [Google Scholar] [CrossRef] [PubMed]
- Beck, C.B. An Introduction to Plant Structure and Development: Plant Anatomy for the Twenty-First Century, 2nd ed.; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Bae, K. Large-Area, Crosstalk-Free, Flexible Tactile Sensor Matrix Pixelated by Mesh Layers. ACS Appl. Mater. Interfaces 2021, 13, 12259–12267. [Google Scholar] [CrossRef]
- Mannsfeld, S.C. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Mi, Y. Micromolding of PDMS scaffolds and microwells for tissue culture and cell patterning: A new method of microfabrication by the self-assembled micropatterns of diblock copolymer micelles. Polymer 2006, 47, 5124–5130. [Google Scholar] [CrossRef]
- Balaban, N.Q. Force and focal adhesion assembly: A close relationship studied using elastic micropatterned substrates. Nat. Cell Biol. 2001, 3, 466–472. [Google Scholar] [CrossRef]
- Boutry, C.M. A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics. Sci. Robot. 2018, 3, eaau6914. [Google Scholar] [CrossRef]
- Kamolz, L.P.; Lumenta, D.B. Dermal Replacements in General, Burn, and Plastic Surgery: Tissue Engineering in Clinical Practice; Springer: Vienna, Austria, 2013. [Google Scholar]
- Maiolino, P. A Flexible and Robust Large Scale Capacitive Tactile System for Robots. IEEE Sens. J. 2013, 13, 3910–3917. [Google Scholar] [CrossRef] [Green Version]
- Pyo, S. Flexible, Transparent, Sensitive, and Crosstalk-Free Capacitive Tactile Sensor Array Based on Graphene Electrodes and Air Dielectric. Adv. Electron. Mater. 2018, 4, 1700427. [Google Scholar] [CrossRef]
- An, B.W. Transparent and flexible fingerprint sensor array with multiplexed detection of tactile pressure and skin temperature. Nat. Commun. 2018, 9, 2458. [Google Scholar] [CrossRef]
- Lei, K.F. Development of a flexible PDMS capacitive pressure sensor for plantar pressure measurement. Microelectron. Eng. 2012, 99, 1–5. [Google Scholar] [CrossRef]
- Lee, H. Normal and Shear Force Measurement Using a Flexible Polymer Tactile Sensor With Embedded Multiple Capacitors. J. Microelectromech. Syst. 2008, 17, 934–942. [Google Scholar]
- Wan, Y. A Highly Sensitive Flexible Capacitive Tactile Sensor with Sparse and High-Aspect-Ratio Microstructures. Adv. Electron. Mater. 2018, 4, 1700586. [Google Scholar] [CrossRef]
- Nie, B. Microfluidic tactile sensors for three-dimensional contact force measurements. Lab. Chip 2014, 14, 4344–4353. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X. Flexible, Stretchable and Wearable Multifunctional Sensor Array as Artificial Electronic Skin for Static and Dynamic Strain Mapping. Adv. Electron. Mater. 2015, 1, 1500142. [Google Scholar] [CrossRef]
- Fu, Y. Design, fabrication and testing of piezoelectric polymer PVDF microactuators. Smart Mater. Struct. 2006, 15, 141–146. [Google Scholar] [CrossRef]
- Wang, Z. Flexible and Washable Poly(Ionic Liquid) Nanofibrous Membrane with Moisture Proof Pressure Sensing for Real-Life Wearable Electronics. ACS Appl. Mater. Interfaces 2019, 11, 27200–27209. [Google Scholar] [CrossRef] [PubMed]
- Jeong, C.K. Lead-Free Perovskite Nanowire-Employed Piezopolymer for Highly Efficient Flexible Nanocomposite Energy Harvester. Small 2018, 14, 1704022. [Google Scholar] [CrossRef]
- Jiang, J. Flexible Piezoelectric Pressure Tactile Sensor Based on Electrospun BaTiO3/Poly(vinylidene fluoride) Nanocomposite Membrane. ACS Appl. Mater. Interfaces 2020, 12, 33989–33998. [Google Scholar] [CrossRef] [PubMed]
- Chen, X. High-Performance Piezoelectric Nanogenerators with Imprinted P(VDF-TrFE)/BaTiO3 Nanocomposite Micropillars for Self-Powered Flexible Sensors. Small 2017, 13, 1604245. [Google Scholar] [CrossRef]
- Dagdeviren, C. Conformable amplified lead zirconate titanate sensors with enhanced piezoelectric response for cutaneous pressure monitoring. Nat. Commun. 2014, 5, 4496. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, W. Skin-Inspired Piezoelectric Tactile Sensor Array with Crosstalk-Free Row+Column Electrodes for Spatiotemporally Distinguishing Diverse Stimuli. Avd. Sci. 2021, 8, 2002817. [Google Scholar] [CrossRef] [PubMed]
- Deng, W. Cowpea-structured PVDF/ZnO nanofibers based flexible self-powered piezoelectric bending motion sensor towards remote control of gestures. Nano Energy 2019, 55, 516–525. [Google Scholar] [CrossRef]
- Zhao, G. Piezoelectric Polyacrylonitrile Nanofiber Film-Based Dual-Function Self-Powered Flexible Sensor. ACS Appl. Mater. Interfaces 2018, 10, 15855–15863. [Google Scholar] [CrossRef]
- Zhang, Q. Transparent and Self-Powered Multistage Sensation Matrix for Mechanosensation Application. ACS Nano 2018, 12, 254–262. [Google Scholar] [CrossRef]
- Park, D.Y. Self-Powered Real-Time Arterial Pulse Monitoring Using Ultrathin Epidermal Piezoelectric Sensors. Adv. Mater. 2017, 29, 1702308. [Google Scholar] [CrossRef]
- Song, H. Lead iodide nanosheets for piezoelectric energy conversion and strain sensing. Nano Energy 2018, 49, 7–13. [Google Scholar] [CrossRef]
- Guo, R. A self-powered stretchable sensor fabricated by serpentine PVDF film for multiple dynamic monitoring. Mater. Des. 2019, 182, 108025. [Google Scholar] [CrossRef]
- Kim, M.-O. Flexible and multi-directional piezoelectric energy harvester for self-powered human motion sensor. Smart Mater. Struct. 2018, 27, 035001. [Google Scholar] [CrossRef]
- Pan, C. High-resolution electroluminescent imaging of pressure distribution using a piezoelectric nanowire LED array. Nat. Photonics 2013, 7, 752–758. [Google Scholar] [CrossRef]
- Wu, W. Piezoelectricity of single-atomic-layer MoS2 for energy conversion and piezotronics. Nature 2014, 514, 470–474. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Wang, Z. Triboelectric Nanogenerators: Green Energy and Technology; Springer: Cham, Switzerland, 2016; 517p. [Google Scholar]
- Wang, P. Complementary Electromagnetic-Triboelectric Active Sensor for Detecting Multiple Mechanical Triggering. Adv. Funct. Mater. 2018, 28, 1705808. [Google Scholar] [CrossRef]
- Dong, K. Versatile Core–Sheath Yarn for Sustainable Biomechanical Energy Harvesting and Real-Time Human-Interactive Sensing. Adv. Energ. Mater. 2018, 8, 1801114. [Google Scholar] [CrossRef]
- Zhu, M. Technologies toward next generation human machine interfaces: From machine learning enhanced tactile sensing to neuromorphic sensory systems. Appl. Phys. Rev. 2020, 7, 031305. [Google Scholar] [CrossRef]
- Nguyen, V.; Yang, R. Effect of humidity and pressure on the triboelectric nanogenerator. Nano Energy 2013, 2, 604–608. [Google Scholar] [CrossRef]
- Chen, X. Waterproof and stretchable triboelectric nanogenerator for biomechanical energy harvesting and self-powered sensing. Appl. Phys. Lett. 2018, 112, 203902. [Google Scholar] [CrossRef]
- Dong, K. A Stretchable Yarn Embedded Triboelectric Nanogenerator as Electronic Skin for Biomechanical Energy Harvesting and Multifunctional Pressure Sensing. Adv. Mater. 2018, 30, 1804944. [Google Scholar] [CrossRef]
- Yang, Y. Single-Electrode-Based Sliding Triboelectric Nanogenerator for Self-Powered Displacement Vector Sensor System. ACS Nano 2013, 7, 7342–7351. [Google Scholar] [CrossRef]
- He, W. Boosting output performance of sliding mode triboelectric nanogenerator by charge space-accumulation effect. Nat. Commun. 2020, 11, 4277. [Google Scholar] [CrossRef]
- Zhang, B. Self-Powered Acceleration Sensor Based on Liquid Metal Triboelectric Nanogenerator for Vibration Monitoring. ACS Nano 2017, 11, 7440–7446. [Google Scholar] [CrossRef]
- Wen, Z. A Wrinkled PEDOT:PSS Film Based Stretchable and Transparent Triboelectric Nanogenerator for Wearable Energy Harvesters and Active Motion Sensors. Adv. Funct. Mater. 2018, 28, 1803684. [Google Scholar] [CrossRef]
- Bu, T. Stretchable Triboelectric–Photonic Smart Skin for Tactile and Gesture Sensing. Adv. Mater. 2018, 30, 1800066. [Google Scholar] [CrossRef]
- Yang, Z.W. Tribotronic Transistor Array as an Active Tactile Sensing System. ACS Nano 2016, 10, 10912–10920. [Google Scholar] [CrossRef] [PubMed]
- Wang, X. A Highly Stretchable Transparent Self-Powered Triboelectric Tactile Sensor with Metallized Nanofibers for Wearable Electronics. Adv. Mater. 2018, 30, 1706738. [Google Scholar] [CrossRef] [PubMed]
- Chun, S. Self-Powered Pressure- and Vibration-Sensitive Tactile Sensors for Learning Technique-Based Neural Finger Skin. Nano Lett. 2019, 19, 3305–3312. [Google Scholar] [CrossRef]
- Jiang, X.-Z. Integrated Flexible, Waterproof, Transparent, and Self-Powered Tactile Sensing Panel. ACS Nano 2016, 10, 7696–7704. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G. Self-Powered, Ultrasensitive, Flexible Tactile Sensors Based on Contact Electrification. Nano Lett. 2014, 14, 3208–3213. [Google Scholar] [CrossRef]
- Pu, X. Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing. Sci. Adv. 2017, 3, e1700015. [Google Scholar] [CrossRef] [PubMed]
- Xiong, J. Skin-touch-actuated textile-based triboelectric nanogenerator with black phosphorus for durable biomechanical energy harvesting. Nat. Commun. 2018, 9, 4280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J. Self-Powered Triboelectric Micro Liquid/Gas Flow Sensor for Microfluidics. ACS Nano 2016, 10, 8104–8112. [Google Scholar] [CrossRef]
- Ramuz, M. Transparent, Optical, Pressure-Sensitive Artificial Skin for Large-Area Stretchable Electronics. Adv. Mater. 2012, 24, 3223–3227. [Google Scholar] [CrossRef]
- Yun, S. Polymer-Waveguide-Based Flexible Tactile Sensor Array for Dynamic Response. Adv. Mater. 2014, 26, 4474–4480. [Google Scholar] [CrossRef]
- Wang, X. Piezophotonic effect based on mechanoluminescent materials for advanced flexible optoelectronic applications. Nano Energy 2019, 55, 389–400. [Google Scholar] [CrossRef]
- Stoppa, M.; Chiolerio, A. Wearable Electronics and Smart Textiles: A Critical Review. Sensors 2014, 14, 11957–11992. [Google Scholar] [CrossRef] [Green Version]
- Khan, H. Highly Sensitive Mechano-Optical Strain Sensor Based on 2D Material for Human Quality Gaits Monitoring and High-End Robotic Applications. J. Mater. Chem. C 2021, accepted. [Google Scholar]
- Zou, L. Novel Tactile Sensor Technology and Smart Tactile Sensing Systems: A Review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef] [PubMed]
- Gu, J. Wearable Strain Sensors Using Light Transmittance Change of Carbon Nanotube-Embedded Elastomers with Microcracks. ACS Appl. Mater. Interfaces 2020, 12, 10908–10917. [Google Scholar] [CrossRef]
- Yi, H. Ultra-Adaptable and Wearable Photonic Skin Based on a Shape-Memory, Responsive Cellulose Derivative. Adv. Funct. Mater. 2019, 29, 1902720. [Google Scholar] [CrossRef]
- Wang, X. Dynamic Pressure Mapping of Personalized Handwriting by a Flexible Sensor Matrix Based on the Mechanoluminescence Process. Adv. Mater. 2015, 27, 2324–2331. [Google Scholar] [CrossRef]
- Boland, J.J. Within touch of artificial skin. Nat. Mater. 2010, 9, 790–792. [Google Scholar] [CrossRef] [PubMed]
- Viriri, S.; Tapamo, J.R. Integrating Iris and Signature Traits for Personal Authentication Using User-SpecificWeighting. Sensors 2012, 12, 4324–4338. [Google Scholar] [CrossRef] [Green Version]
- Jeong, S.M. Battery-Free, Human-Motion-Powered Light-Emitting Fabric: Mechanoluminescent Textile. Avd. Sustain. 2017, 1, 1700126. [Google Scholar] [CrossRef]
- Wang, X. Automated Online Solid-Phase Derivatization for Sensitive Quantification of Endogenous S-Nitrosoglutathione and Rapid Capture of Other Low-Molecular-Mass S-Nitrosothiols. Anal. Chem. 2018, 90, 1967–1975. [Google Scholar] [CrossRef] [Green Version]
- Wang, X. Full Dynamic-Range Pressure Sensor Matrix Based on Optical and Electrical Dual-Mode Sensing. Adv. Mater. 2017, 29, 1605817. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.-C. Color Manipulation of Intense Multiluminescence from CaZnOS:Mn2+ by Mn2+ Concentration Effect. Chem. Mater. 2015, 27, 7481–7489. [Google Scholar] [CrossRef]
- Li, L. CaZnOS:Nd3+ Emits Tissue-Penetrating near-Infrared Light upon Force Loading. ACS Appl. Mater. Interfaces 2018, 10, 14509–14516. [Google Scholar] [CrossRef]
- Zhang, J.-C. Creating Recoverable Mechanoluminescence in Piezoelectric Calcium Niobates through Pr3+ Doping. Chem. Mater. 2016, 28, 4052–4057. [Google Scholar] [CrossRef]
- Larson, C. Highly stretchable electroluminescent skin for optical signaling and tactile sensing. Science 2016, 351, 1071–1074. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z. Textile Display for Electronic and Brain-Interfaced Communications. Adv. Mater. 2018, 30, 1800323. [Google Scholar] [CrossRef] [PubMed]
- Jeong, S.M. Simultaneous dual-channel blue/green emission from electro-mechanically powered elastomeric zinc sulphide composite. Nano Energy 2016, 21, 154–161. [Google Scholar] [CrossRef]
- Yu, J. Highly skin-conformal wearable tactile sensor based on piezoelectric-enhanced triboelectric nanogenerator. Nano Energy 2019, 64, 103923. [Google Scholar] [CrossRef]
- Li, T. From Dual-Mode Triboelectric Nanogenerator to Smart Tactile Sensor: A Multiplexing Design. ACS Nano 2017, 11, 3950–3956. [Google Scholar] [CrossRef]
- Wang, X. Self-Powered High-Resolution and Pressure-Sensitive Triboelectric Sensor Matrix for Real-Time Tactile Mapping. Adv. Mater. 2016, 28, 2896–2903. [Google Scholar] [CrossRef]
- Jin, L. Self-powered Real-time Movement Monitoring Sensor Using Triboelectric Nanogenerator Technology. Sci. Rep. 2017, 7, 10521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shin, Y.E. Sewing machine stitching of polyvinylidene fluoride fibers: Programmable textile patterns for wearable triboelectric sensors. J. Mater. Chem. A 2018, 6, 22879–22888. [Google Scholar] [CrossRef]
- Rein, M. Diode fibres for fabric-based optical communications. Nature 2018, 560, 214–218. [Google Scholar] [CrossRef]
- Yang, Y. Liquid-Metal-Based Super-Stretchable and Structure-Designable Triboelectric Nanogenerator for Wearable Electronics. ACS Nano 2018, 12, 2027–2034. [Google Scholar] [CrossRef]
- Cai, Y. Extraordinarily Stretchable All-Carbon Collaborative Nanoarchitectures for Epidermal Sensors. Adv. Mater. 2017, 29, 1606411. [Google Scholar] [CrossRef]
- Park, J. Fingertip skin-inspired microstructured ferroelectric skins discriminate static/dynamic pressure and temperature stimuli. Sci. Adv. 2015, 1, e1500661. [Google Scholar] [CrossRef] [Green Version]
- Jang, K.-I. Rugged and breathable forms of stretchable electronics with adherent composite substrates for transcutaneous monitoring. Nat. Commun. 2014, 5, 4779. [Google Scholar] [CrossRef]
- Kim, S.-W. A Triple-Mode Flexible E-Skin Sensor Interface for Multi-Purpose Wearable Applications. Sensors 2018, 18, 78. [Google Scholar] [CrossRef] [Green Version]
- Zhou, K. Template-Directed Growth of Hierarchical MOF Hybrid Arrays for Tactile Sensor. Adv. Funct. Mater. 2020, 30, 2001296. [Google Scholar] [CrossRef]
- Chen, J. Personalized Keystroke Dynamics for Self-Powered Human–Machine Interfacing. ACS Nano 2015, 9, 105–116. [Google Scholar] [CrossRef]
- Chun, K.-Y. A Self-Powered Sensor Mimicking Slow- and Fast-Adapting Cutaneous Mechanoreceptors. Adv. Mater. 2018, 30, 1706299. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y. A highly flexible tactile sensor with an interlocked truncated sawtooth structure based on stretchable graphene/silver/silicone rubber composites. J. Mater. Chem. C 2019, 7, 8669–8679. [Google Scholar] [CrossRef]
- Tuthill, J.C.; Wilson, R.I. Mechanosensation and Adaptive Motor Control in Insects. Curr. Biol. 2016, 26, R1022–R1038. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, B. Bioinspired and bristled microparticles for ultrasensitive pressure and strain sensors. Nat. Commun. 2018, 9, 5161. [Google Scholar] [CrossRef]
- Dechant, H.E. Arthropod touch reception: Stimulus transformation and finite element model of spider tactile hairs. J. Comp. Physiol. A. 2001, 187, 313–322. [Google Scholar] [PubMed]
- Barth, F.G. Spider mechanoreceptors. Curr. Opin. Neurobiol. 2004, 14, 415–422. [Google Scholar] [CrossRef]
- Li, T. Flexible Capacitive Tactile Sensor Based on Micropatterned Dielectric Layer. Small 2016, 12, 5042–5048. [Google Scholar] [CrossRef] [PubMed]
- Reeder, J.T. 3D, Reconfigurable, Multimodal Electronic Whiskers via Directed Air Assembly. Adv. Mater. 2018, 30, 1706733. [Google Scholar] [CrossRef] [PubMed]
- Kim, K. Tactile Avatar: Tactile Sensing System Mimicking Human Tactile Cognition. Adv. Sci. 2021, 8, 2002362. [Google Scholar] [CrossRef] [PubMed]









| Material | Structure | Application | Sensitivity | Advantage | Ref. |
|---|---|---|---|---|---|
| Metal alloy | Circular ultra-thin film | Tactile sensor | (0.76–4.18) uS/bar | High sensitivity | [54] |
| Cr/Au | Thick film cruciform Cantilever | Tactile force, shear stress, fluid flow | 0.03 V/uN | Flexible High sensitivity | [55] |
| NiCr | Thin planar | Tactile sensor | Curvature: 40 ppm Force: 340 ppm/nN 230 ppm/µm | Stretchable | [56] |
| Zr55Cu30Ni5Al10 metallic glass | Flexible thin-film layer | Tactile sensor | N/A | Flexible High sensitivity | [57] |
| Graphene | Cylindrical film | Accelerometer | 2.6 mV g−1 | Ultralight High sensitivity | [58] |
| Carbon black silicone composite | Thick film | Pressure sensor | N/A | Stretchability High sensitivity | [59] |
| Polysilicon | Diaphragm | Pressure sensor | (3.35–3.74) mV/bar | Single-pixel mapping sensor | [60] |
| Silicone nanowire | Cantilever | Flow sensor | 198 Ohm ms−1 | High sensitivity wide measure range | [61] |
| rGO foam 1 | Foam | Pressure sensor | 22.8 kPa−1 | Soft, high accuracy, sensitivity | [62] |
| GO-AgNF-PI 2 sponge | Foam | Pressure sensor | 0.572 kPa−1 | High sensitivity, accuracy | [63] |
| rGO/PU 3 | Thin foam | Pressure sensor | 0.67 kPa−1 | Flexibility, high sensitivity, long time stability | [64] |
| Polysilicon | Silk surface | Monitoring human physiological signals | 1.80 kPa−1 | Wearability, high sensitivity | [65] |
| PEDOT:PSS 4 | Nanofibers | Bending-insensitive pressure sensor array | N/A | Transparency, flexibility, wide measure range | [66] |
| Carbon | Planar electrodes, pyramid | Tactile sensor array | −1.10 kPa−1 | Flexibility, position mapping, good accuracy | [67] |
| Material | Structure | Application | Sensitivity | Advantage | Ref. |
|---|---|---|---|---|---|
| P(VDF-TrFE)/ BaTiO3 1 | Composite microfiber | Bending motion sensor for gesture | 0.33 V kPa−1 | Flexibility, high accuracy | [93] |
| BaTiO3 | Fiber/fabric | Wearable physiological sensing | 1.44 V N−1 | Flexibility, High accuracy | [94] |
| P(VDF-TrFE) | Planar | Movement monitoring and e-skin | N/A | Transparency, high accuracy, fast response | [95] |
| Pb[Zrx,Ti1−x]O3 | Thick block | Pulse monitoring | 0.018 kPa−1 | Ultrathin, high sensitivity, long time stability | [96] |
| PbI2 | Planar | Motion sensor/ Environment vibration | N/A | Stretchability, long time stability, high sensitivity | [97] |
| PVDF 2 | Nanofiber | Strain sensor | N/A | Stretchability, Wide measure range | [98] |
| PVDF | Thin film planar | Human motion | 1.5 × 10−5 V mN−1 | High sensitivity | [99] |
| PMMA 3 p-GaN | Vertical fiber Planar | Digital imaging | 12.88 GPa−1 | High resolution Flexibility | [100] |
| MoS2 | Single atom layer | Energy conversion | N/A | Flexibility, Transparence, | [101] |
| Material | Structure | Application | Sensitivity | Advantage | Ref. |
|---|---|---|---|---|---|
| Hg/PVDF | Liquid metal/ Microfiber | Acceleration sensor | 0.26 vs. m−1 | Very high accuracy | [112] |
| PEDOT:PSS | Planar with wrinkle | Motion senor | (0.008–0.08) kPa−1 | Stretchability, high accuracy | [113] |
| Silicone rubber/AgNWs | Nanowires sandwich by silicone | Motion sensor | 0.034 V Pa−1 | Stretchability, high accuracy, long time stability | [114] |
| PTFE 1/Cu | Gate for transistor | Touch tactile array system | (0.0778–1.028) mm−1 | Flexibility, Long time stability, Position mapping | [115] |
| PVA 2 | Microfiber on PDMS substrate | Touching sensor | 4.4 Pa | Transparence, stretchability, long time stability | [116] |
| Graphene | Planar | TENG 3 mimics fast adapting of the neuron system | (0.04–1.64) kPa−1 | High resolution, high sensitivity, position mapping, flexibility | [117] |
| ITO 4/PDMS | Planar/Pyramid on planar | Tactile sensor array | 2.82 V Pa−1 | Flexibility, wide measurement range, position mapping high accuracy | [118] |
| Fluorinated ethylene propylene | Planar with vertical fiber | Touching sensor | 44 mV 1.1 V/Pa | Ultra-sensitivity, flexibility, transparency | [119] |
| PDMS PAAm 5–LiCl | Elastomers contain hydrogel | Flexible, transparent motion sensor | 0.013 kPa−1 | Ultra-stretchability | [120] |
| HCOENPs/BP/PET 6 | PET fabric coat black phosphorus and particles | Motion sensor for artificial intelligence | N/A | Wearable, high accuracy, long time stability | [121] |
| PTFE | PTFE sandwich Cu | Water/air low sensor | N/A | High accuracy | [122] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-D.; Lee, J.S. Recent Development of Flexible Tactile Sensors and Their Applications. Sensors 2022, 22, 50. https://doi.org/10.3390/s22010050
Nguyen T-D, Lee JS. Recent Development of Flexible Tactile Sensors and Their Applications. Sensors. 2022; 22(1):50. https://doi.org/10.3390/s22010050
Chicago/Turabian StyleNguyen, Trong-Danh, and Jun Seop Lee. 2022. "Recent Development of Flexible Tactile Sensors and Their Applications" Sensors 22, no. 1: 50. https://doi.org/10.3390/s22010050