
Constrained ESKF for UAV Positioning in Indoor Corridor Environment Based on IMU and WiFi


Abstract
:1. Introduction
2. Positioning Methods Based on IMU and WiFi
2.1. WiFi-Based Positioning Method
2.1.1. Zone Partition Algorithm by Spatial Feature
2.1.2. WKNN Algorithm Based on Zone Partition
2.2. IMU-Based Positioning Algorithm
3. Data Fusion Method and Optimization
3.1. ESKF Algorithm for Combined Positioning
3.1.1. System States
- : position of UAV in global frame;
- : velocity of UAV in global frame;
- : quaternion of UAV;
- : rotation matrix of UAV;
- : accelerometer bias;
- : gyroscope bias.
3.1.2. System Kinematics Models
3.1.3. Propagation
3.1.4. Measurement Update
3.1.5. Nominal State Update
3.1.6. ESKF Reset
3.2. Optimization by Constrained ESKF
3.2.1. Position Constraints
3.2.2. Optimization Algorithm Based on Probability
4. Experiment Results and Discussion
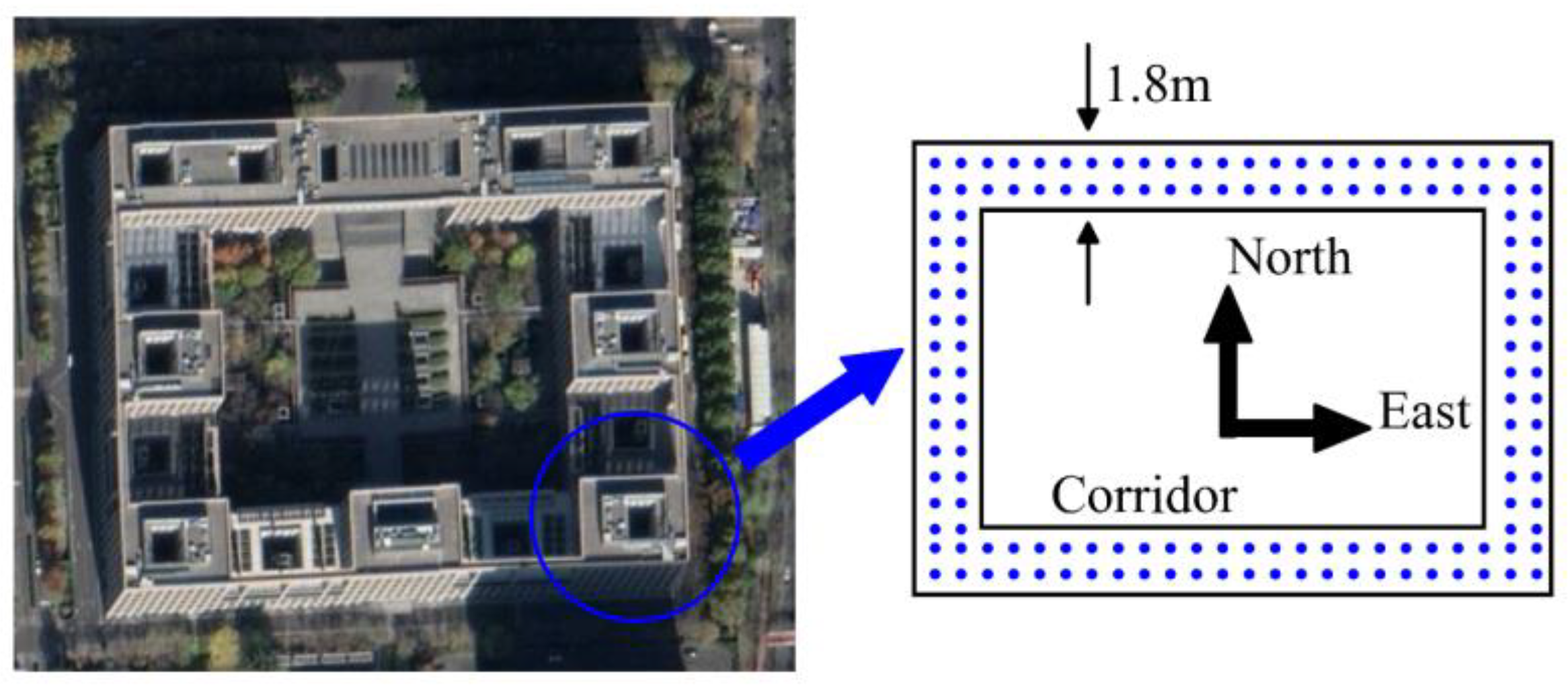
4.1. UAV Platform and Testing Environment
4.2. WiFi-Based and IMU-Based Positioning Experimnet Results and Discussion
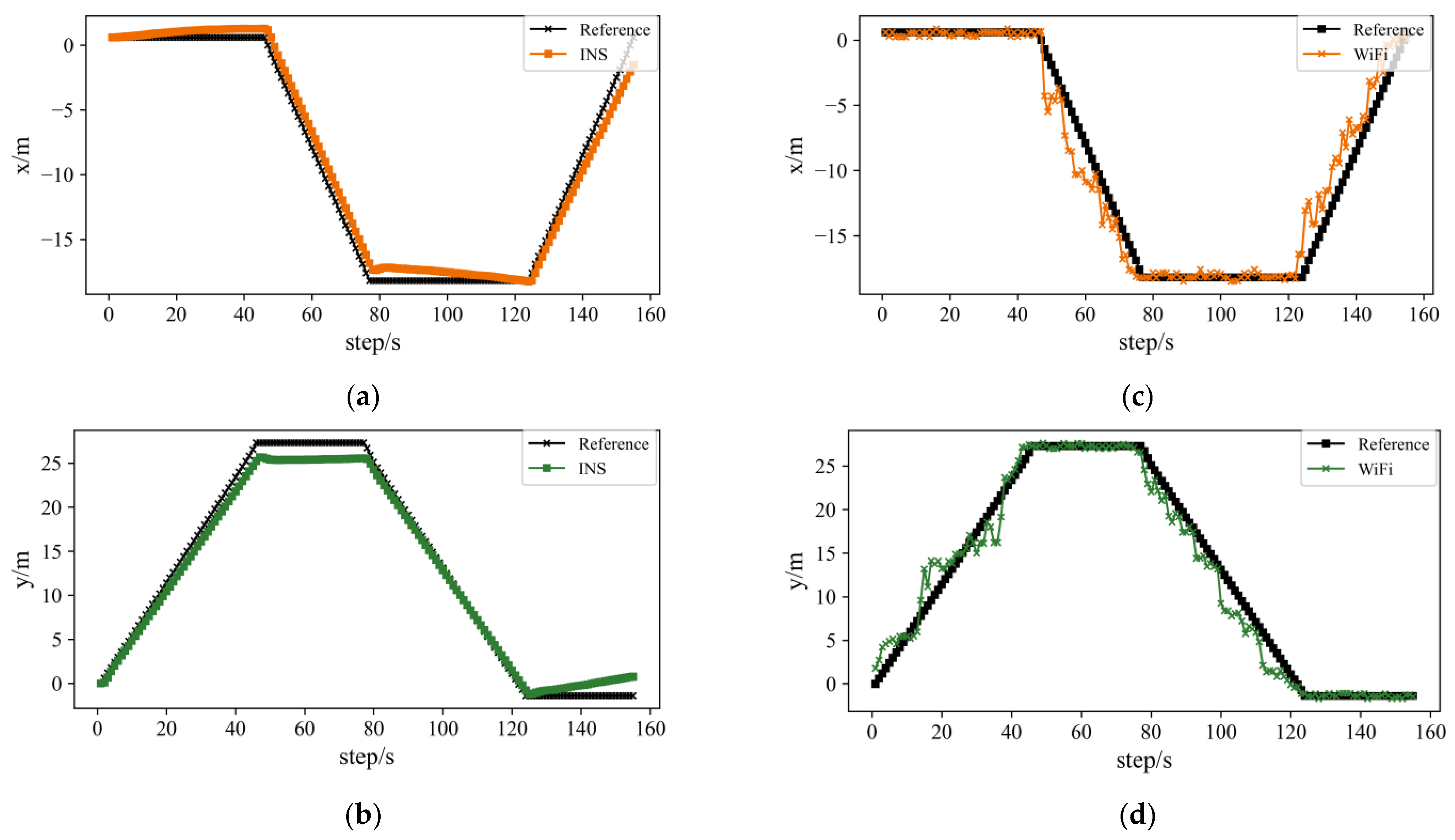
4.2.1. WiFi-Based Positioning Experiment Results and Discussion
4.2.2. IMU-Based Positioning Experiment Results and Discussion
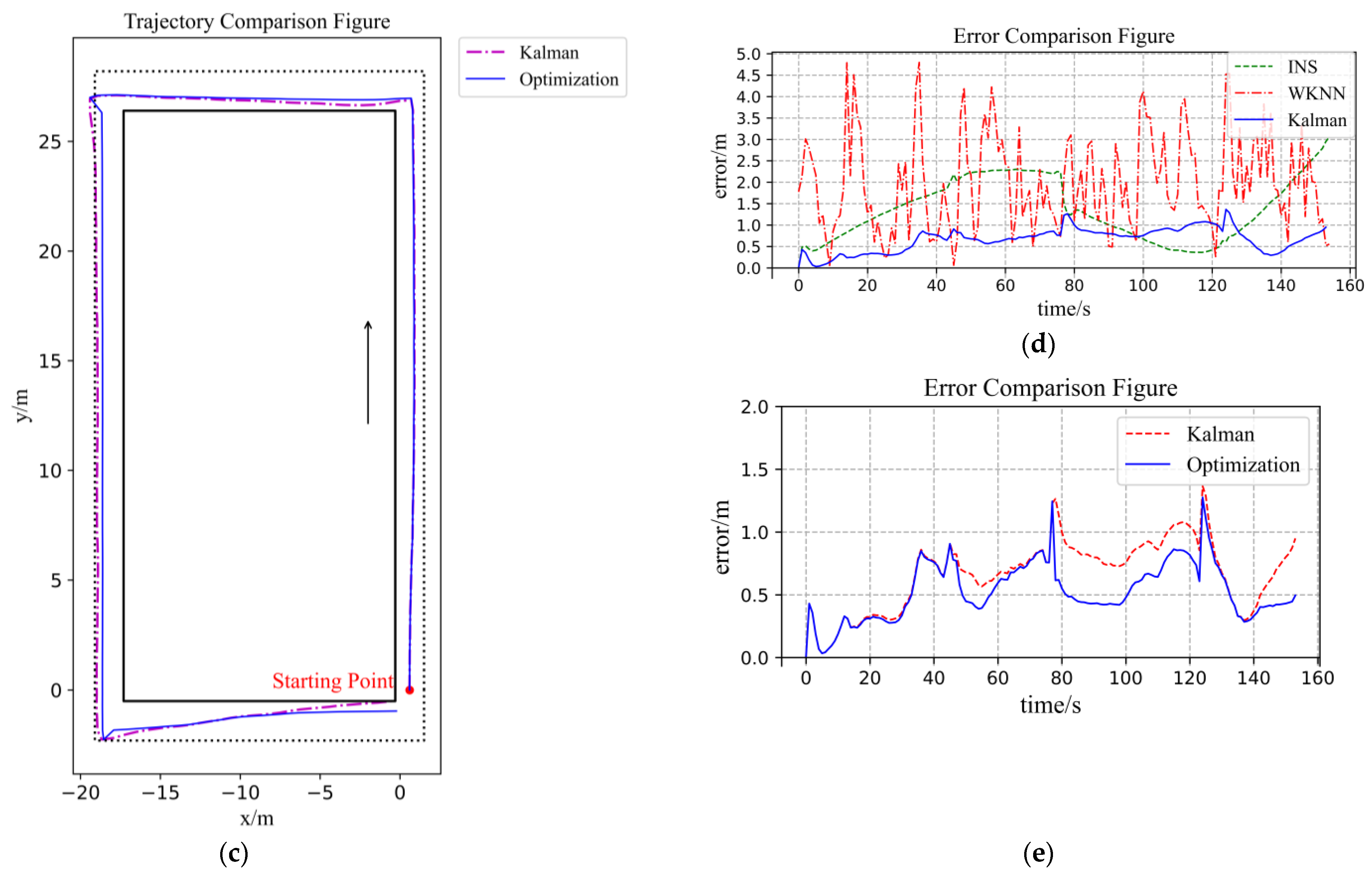
4.3. ESKF for Combined Positioning Method Experiment Result and Discussion
4.4. Constrained ESKF Positioning Experiment Result and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wan, X.; Zhan, X. The research of indoor navigation system using pseudolites. Procedia Eng. 2011, 15, 1446–1450. [Google Scholar] [CrossRef] [Green Version]
- Wang, J. Pseudolite applications in positioning and navigation: Pro-gress and problems. Positioning 2002, 1, 48–56. [Google Scholar] [CrossRef] [Green Version]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E.; Grixa, I.; Ruess, F.; Suppa, M.; Burschka, D. Toward a Fully Autonomous UAV: Research Platform for Indoor and Outdoor Urban Search and Rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. [Google Scholar] [CrossRef] [Green Version]
- Valenti, F.; Giaquinto, D.; Musto, L.; Zinelli, A.; Bertozzi, M.; Broggi, A. Enabling Computer Vision-Based Autonomous Navigation for Unmanned Aerial Vehicles in Cluttered GPS-Denied Environments. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, Hawaii, USA, 4–7 November 2018; pp. 3886–3891. [Google Scholar]
- Wang, F.; Cui, J.; Phang, S.K.; Chen, B.M.; Lee, T.H. A mono-camera and scanning laser range finder based UAV indoor navigation system. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 694–701. [Google Scholar]
- Zhang, X.W.; Du, Y.S.; Chen, F.; Qin, L.L.; Ling, Q. Indoor Position Control of a Quadrotor UAV with Monocular Vision Feedback. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 9760–9765. [Google Scholar]
- Zhang, Y.; Cai, Z.; Zhao, J.; You, Z.; Wang, Y. Feature-Based Monocular Real-Time Localization for UAVs in Indoor Environment. In Proceedings of the 2017 Chinese Intelligent Automation Conference; Springer: Singapore, 2018; pp. 357–366. [Google Scholar] [CrossRef]
- Salazar, S.; Romero, H.; Gómez, J.; Lozano, R. Real-time stereo visual servoing control of an UAV having eight-rotors. In Proceedings of the 2009 6th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 10–13 January 2009; pp. 1–11. [Google Scholar]
- Gerhart, G.R.; Soloviev, A.; Gage, D.W.; Rutkowski, A.J.; Shoemaker, C.M. Fusion of inertial, optical flow, and airspeed measurements for UAV navigation in GPS-denied environments. In Proceedings of the Unmanned Systems Technology XI, Orlando, FL, USA, 13−17 April 2009. [Google Scholar]
- Mora Granillo, O.D.; Zamudio Beltran, Z. Real-Time Drone (UAV) Trajectory Generation and Tracking by Optical Flow. In Proceedings of the 2018 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE), Cuernavaca, Mexico, 26–29 November 2018; pp. 38–43. [Google Scholar]
- Yang, H.; Zhang, Y.; Huang, Y.; Fu, H.; Wang, Z. WKNN indoor location algorithm based on zone partition by spatial features and restriction of former location. Pervasive Mob. Comput. 2019, 60, 101085. [Google Scholar] [CrossRef]
- Chen, Z.; Zou, H.; Yang, J.; Jiang, H.; Xie, L. WiFi Fingerprinting Indoor Localization Using Local Feature-Based Deep LSTM. IEEE Syst. J. 2020, 14, 3001–3010. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, P.; Niu, X.; Zhuang, Y.; Lan, H.; El-Sheimy, N. Real-time indoor navigation using smartphone sensors. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–10. [Google Scholar]
- Nguyen, D.-V.; Nashashibi, F.; Nguyen, T.-H.; Castelli, E. Indoor Intelligent Vehicle localization using WiFi received signal strength indicator. In Proceedings of the 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 19–21 March 2017; pp. 33–36. [Google Scholar]
- Jian, H.X.; Hao, W. WIFI Indoor Location Optimization Method Based on Position Fingerprint Algorithm. In Proceedings of the 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changsha, China, 27–28 May 2017; pp. 585–588. [Google Scholar]
- Joseph, R.; Sasi, S.B. Indoor Positioning Using WiFi Fingerprint. In Proceedings of the 2018 International Conference on Circuits and Systems in Digital Enterprise Technology (ICCSDET), Kottayam, India, 21–22 December 2018; pp. 1–3. [Google Scholar]
- Lemic, F.; Behboodi, A.; Handziski, V.; Wolisz, A. Increasing Interference Robustness of WiFi Fingerprinting by Leveraging Spectrum Information. In Proceedings of the 2015 IEEE International Conference on Computer and Information Technology; Ubiquitous Computing and Communications; Dependable, Autonomic and Secure Computing; Pervasive Intelligence and Computing, Liverpool, UK, 26–28 October 2015; pp. 1200–1208. [Google Scholar]
- Ting-Ting, X.; Xing-Yu, L.; Ke, H.; Min, Y. Study of fingerprint location algorithm based on WiFi technology for indoor localization. In Proceedings of the 10th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2014), Beijing, China, 26–28 September 2014; pp. 604–608. [Google Scholar]
- Schatzberg, U.; Banin, L.; Amizur, Y. Enhanced WiFi ToF indoor positioning system with MEMS-based INS and pedometric information. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 185–192. [Google Scholar]
- Naseri, H.; Homaeinezhad, M.R. Improving measurement quality of a MEMS-based gyro-free inertial navigation system. Sens. Actuators A Phys. 2014, 207, 10–19. [Google Scholar] [CrossRef]
- Huang, H.; Zeng, Q.; Chen, R.; Meng, Q.; Wang, J.; Zeng, S. Seamless Navigation Methodology optimized for Indoor/Outdoor Detection Based on WIFI. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018; pp. 1–7. [Google Scholar]
- Biswas, J.; Veloso, M. WiFi localization and navigation for autonomous indoor mobile robots. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4379–4384. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Min/m | Max/m | Mean/m |
|---|---|---|---|
| Zone partition-based WKNN algorithm | 0.01 | 4.79 | 1.98 |
| Algorithm | Min/m | Max/m | Mean/m |
|---|---|---|---|
| IMU-based positioning algorithm | 0.001 | 3.06 | 1.37 |
| Algorithm | Min/m | Max/m | Mean/m |
|---|---|---|---|
| WiFi-based positioning algorithm | 0.01 | 4.79 | 1.98 |
| IMU-based positioning algorithm | 0.001 | 3.06 | 1.37 |
| ESKF-based data fusion algorithm | 0.001 | 1.37 | 0.67 |
| Algorithm | Min/m | Max/m | Mean/m |
|---|---|---|---|
| ESKF-based data fusion algorithm | 0.001 | 1.37 | 0.67 |
| Constrained ESKF optimization algorithm | 0.001 | 1.28 | 0.53 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zhang, Y. Constrained ESKF for UAV Positioning in Indoor Corridor Environment Based on IMU and WiFi. Sensors 2022, 22, 391. https://doi.org/10.3390/s22010391
Li Z, Zhang Y. Constrained ESKF for UAV Positioning in Indoor Corridor Environment Based on IMU and WiFi. Sensors. 2022; 22(1):391. https://doi.org/10.3390/s22010391
Chicago/Turabian StyleLi, Zhonghan, and Yongbo Zhang. 2022. "Constrained ESKF for UAV Positioning in Indoor Corridor Environment Based on IMU and WiFi" Sensors 22, no. 1: 391. https://doi.org/10.3390/s22010391