
On-Demand Charging Management Model and Its Optimization for Wireless Renewable Sensor Networks



Abstract
:1. Introduction
- First, we investigate the operation of a sensor network and propose an on-demand energy-saving strategy called the energy renewable management system (ERMS) for keeping the network operational for a long time by examining the wireless mobile charging device vacation time efficiency, the total distance traveled by the WMCD, the total energy consumed and the total number of cycles.
- Secondly, based on the presented strategy, a heuristic algorithm called particle swarm optimization (PSO) is developed and successfully implemented for solving the energy replenishing problem of the wireless sensor network and developing a suitable fitness function for achieving the said objectives.
- This work aims to solve the problem of wireless energy transfer by investigating the mobile charging request strategy, where two sets of variables are introduced—emin, ethresh—to help manage the energy in the node and levels of charging of WMCD. We finally compare the results from the proposed algorithm with other notable algorithms.
2. Problem Description
3. Energy Consumption Analysis
- The total power consumption has two parts; their sum is seen in Equation (4) and can be calculated as follows:where λ is the energy conversion efficiency of non-radiative energy transfer. is the total time and is the distance traveled by the WMCD throughout all cycles.
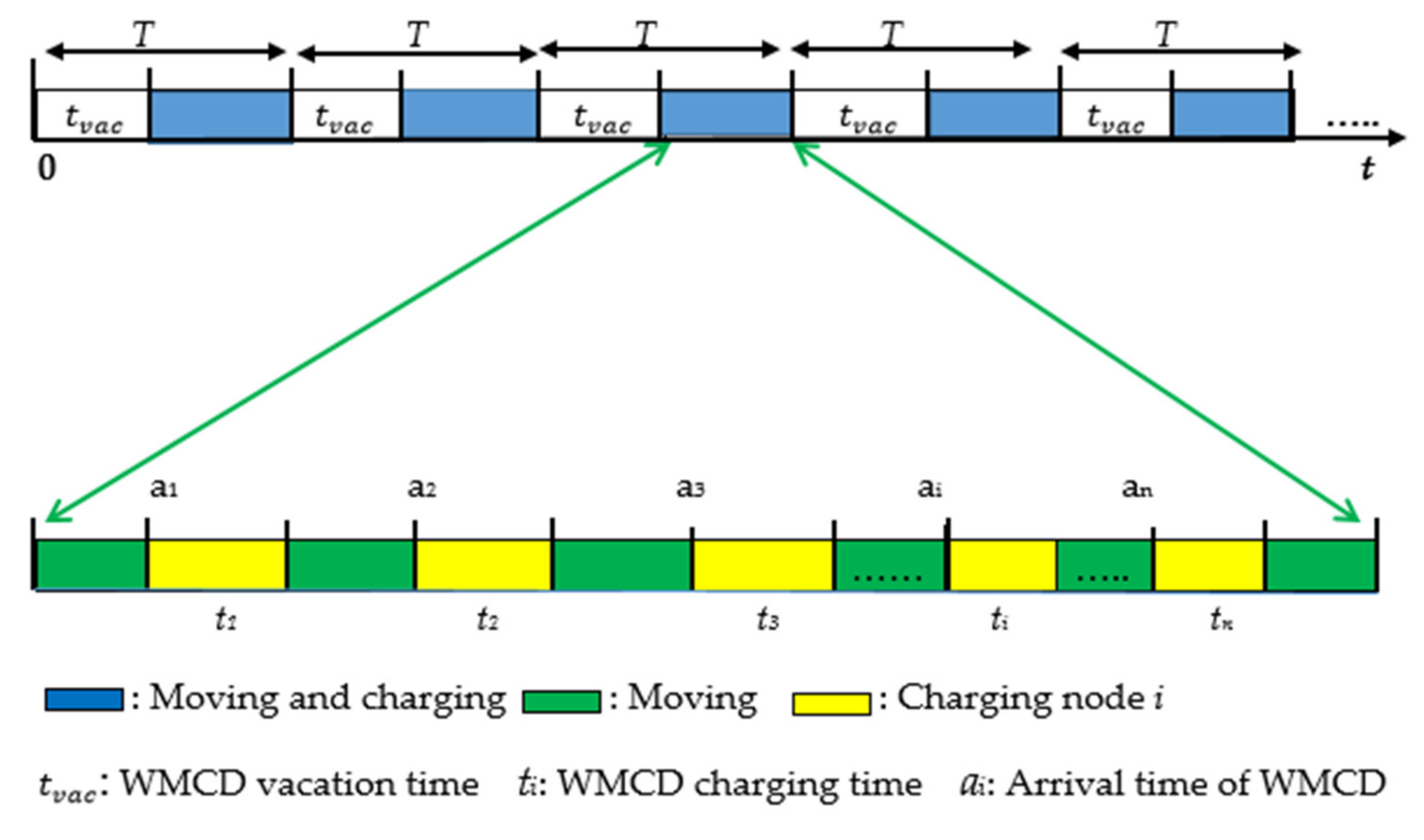
- The ratio of vacation time of the WMCD (), which serves as the optimization goal in [13,14,15]. We describe in this study as the mean percentage of time in each cycle that the WMCD spent on vacation, and it can be calculated as follows:where is the total amount of time that the WMCD spends on vacation across all cycles. Our goal in this research is to reduce the value of . In Equation (5), we can observe that when grows, the WMCD has a longer period to repair or replenish its battery at the RS, indicating greater network performance.
4. Implementation of Proposed ERMS-PSO
4.1. Energy Renewable Management System (ERMS)
- (i)
- Recharges its battery;
- (ii)
- Replaces its battery;
- (iii)
- Becomes aware of the received recharging requests.
| Algorithm 1. ERMS procedures. | |
| ERMS algorithm | |
| 1. | Determine the value of T and the number of the visits set |
| 2. | Initialize Pmax and Pmin |
| 3. | Initialize emin and ethresh |
| 4. | Set g |
| 5. | Set the recharging period of node i, Ti and classify Zk |
| 6. | Define Z1, Z2, …, Zg |
| 7. | For I = 1, 2, 3,…, n do |
| 8. | a = |
| 9. | I Za |
| 10. | End for |
| 11. | Set the visiting nodes an and traveling path of T |
| 12. | For j = 1, 2, 3,…, |
| 13. | If j is odd, then |
| 14. | Fj = |
| 15. | else |
| 16. | Fj = |
| 17. | End if |
| 18. | For ∀ ∈ Fj do |
| 19. | Charge nodes to Emax |
| 20. | End for |
| 21. | End for |
4.2. Particle Swarm Optimization (PSO)
5. Results
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
Abbreviations
| Abbreviations | Description |
| λ | The efficiency of non-radiative energy transfer |
| T | WMCD periodic trip cycle |
| Hn | Set of nodes that must be visited during the Cth cycle |
| Emin | General minimum energy in the node |
| Emax | Maximum energy in the node |
| emin | Proposed minimum energy |
| ethresh | Proposed threshold energy |
| N | Number of sensor nodes |
| RS | Rest station |
| BS | Base station |
| Ri | Node i data rate |
| pi | Energy consumption rate at sensor node i |
| WMCD | Wireless mobile charging device |
| Pk | Traveling path of WMCD |
| Dn | Distance of Pk |
| tn | Time spent for traveling Pk |
| tvac | Vacation time of WMCD at rest station |
| µvac | WMCD vacation time ratio |
| WSN | Wireless sensor network |
| WET | Wireless energy transfer |
| ERSVC | Energy-efficient renewable scheme with variable cycle |
| TSP | Traveling salesman problem |
| ECPM | Energy consumption per mile |
| ti | Charging duration of node i |
| Ptotal | System total energy consumption |
| Dtotal | Total distance traveled over all cycles |
| Ttotal | Total time spent over all cycles |
| Wij, WiB | Flow rate coefficient from node i to node j (or base station) |
| Vij, ViB | Energy consumption for transmitting a unit of data from node i to node j or base station |
| ρ | Constant coefficient |
| α | Path loss index |
| dij | Distance between sensor i and sensor j (or base station B) |
| β1 and β2 | Constant coefficients in transmission energy modeling |
| (XB, YB) | Coordinates of the base station |
| V | Traveling speed of MCV |
| U | Energy transfer rate of MCV |
| g | The number of sets needing to be classified |
| Zk | The defined set that needs to be classified |
| Fj | The set of nodes that should be visited during the jth cycle |
References
- Singh, R.; Verma, A.K. Energy efficient cross layer based adaptive threshold routing protocol for WSN. AEU—Int. J. Electron. Commun. 2017, 72, 166–173. [Google Scholar] [CrossRef]
- Seah, W.K.G.; Eu, Z.A.; Tan, H.-P. Wireless sensor networks powered by ambient energy harvesting (WSN-HEAP)-Survey and challenges. In Proceedings of the 2009 1st International Conference on Wireless Communication, Vehicular Technology, Information Theory and Aerospace & Electronic Systems Technology, Aalborg, Denmark, 17–20 May 2009; pp. 1–5. [Google Scholar]
- Javadi, M.; Mostafaei, H.; Chowdhurry, M.U.; Abawajy, J.H. Learning automaton based topology control protocol for extending wireless sensor networks lifetime. J. Netw. Comput. Appl. 2018, 122, 128–136. [Google Scholar] [CrossRef]
- Han, G.; Yang, X.; Liu, L.; Zhang, W. A joint energy replenishment and data collection algorithm in wireless rechargeable sensor networks. IEEE Internet Things J. 2017, 5, 2596–2604. [Google Scholar] [CrossRef]
- Priya, S.; Inman, D.J. Energy Harvesting Technologies; Springer: Berlin/Heidelberg, Germany, 2009; Volume 21. [Google Scholar]
- Babayo, A.A.; Anisi, M.H.; Ali, I. A review on energy management schemes in energy harvesting wireless sensor networks. Renew. Sustain. Energy Rev. 2017, 76, 1176–1184. [Google Scholar] [CrossRef]
- Chhawchharia, S.; Sahoo, S.K.; Balamurugan, M.; Sukchai, S.; Yanine, F. Investigation of wireless power transfer applications with a focus on renewable energy. Renew. Sustain. Energy Rev. 2018, 91, 888–902. [Google Scholar] [CrossRef]
- Kuo, Y.-W.; Li, C.-L.; Jhang, J.-H.; Lin, S. Design of a wireless sensor network-based IoT platform for wide area and heterogeneous applications. IEEE Sens. J. 2018, 18, 5187–5197. [Google Scholar] [CrossRef]
- Li, Y.; Shi, R. An intelligent solar energy-harvesting system for wireless sensor networks. IEEE Sens. J. 2015, 2015, 5187–5197. [Google Scholar] [CrossRef] [Green Version]
- Kosunalp, S. An energy prediction algorithm for wind-powered wireless sensor networks with energy harvesting. Energy 2017, 139, 1275–1280. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mukase, S.; Xia, K.; Umar, A. Optimal Base Station Location for Network Lifetime Maximization in Wireless Sensor Network. Electronics 2021, 10, 2760. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D.; Midkiff, S.F. On renewable sensor networks with wireless energy transfer: The multi-node case. In Proceedings of the 2012 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 10–18. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D. Multi-node wireless energy charging in sensor networks. IEEE/ACM Trans. Netw. 2014, 23, 437–450. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D.; Zhou, H.; Midkiff, S.F. A mobile platform for wireless charging and data collection in sensor networks. IEEE J. Sel. Areas Commun. 2015, 33, 1521–1533. [Google Scholar] [CrossRef]
- Dai, H.; Liu, Y.; Chen, G.; Wu, X.; He, T.; Liu, A.X.; Ma, H. Safe charging for wireless power transfer. IEEE/ACM Trans. Netw. 2017, 25, 3531–3544. [Google Scholar] [CrossRef]
- Zhang, Q.; Cheng, R.; Zheng, Z. Energy-efficient renewable scheme for rechargeable sensor networks. EURASIP J. Wirel. Commun. Netw. 2020, 1, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Kong, F.; Wang, M.; Wang, H. Optimized charging scheduling with single mobile charger for wireless rechargeable sensor networks. Symmetry 2017, 9, 285. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Zhang, H.; Chen, F.; Chen, S.; Wu, C.; Wang, T. Spatiotemporal charging scheduling in wireless rechargeable sensor networks. Comput. Commun. 2020, 152, 155–170. [Google Scholar] [CrossRef]
- Zhong, P.; Zhang, Y.; Ma, S.; Kui, X.; Gao, J. RCSS: A real-time on-demand charging scheduling scheme for wireless rechargeable sensor networks. Sensors 2018, 18, 1601. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaswan, A.; Tomar, A.; Jana, P.K. An efficient scheduling scheme for mobile charger in on-demand wireless rechargeable sensor networks. J. Netw. Comput. Appl. 2018, 114, 123–134. [Google Scholar] [CrossRef]
- Dhurgadevi, M.; Meenakshi Devi, P. PSO based algorithm for wireless rechargeable sensor networks. Int. J. Comput. Appl. 2016, 156, 7–11. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, Y.; Li, S.; Cui, M.; Wu, H. Demand-based charging strategy for wireless rechargeable sensor networks. ETRI J. 2019, 41, 326–336. [Google Scholar] [CrossRef]
- Jiang, J.-R.; Chen, Y.-C.; Lin, T.-Y. Particle swarm optimization for charger deployment in wireless rechargeable sensor networks. Int. J. Parallel. Emergent Distrib. Syst. 2021, 36, 652–667. [Google Scholar] [CrossRef]
- Liu, K.; Tan, Y.; He, X. An adaptive staged PSO based on particles’ search capabilities. In Proceedings of the International Conference on Swarm Intelligence, Beijing, China, 12–15 June 2010; pp. 52–59. [Google Scholar]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans Evol Comput 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- Janson, S.; Middendorf, M. A hierarchical particle swarm optimizer and its adaptive variant. IEEE Trans. Syst. Man. Cybern. Part B 2005, 35, 1272–1282. [Google Scholar] [CrossRef] [PubMed]
- Kadirkamanathan, V.; Selvarajah, K.; Fleming, P.J. Stability analysis of the particle dynamics in particle swarm optimizer. IEEE Trans. Evo.l Comput. 2006, 10, 245–255. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. Parameter Selection in Particle Swarm Optimization; Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 1998; Volume 1447, pp. 591–600. [Google Scholar] [CrossRef]
- Kennedy, J.; Mendes, R. Population structure and particle swarm performance. In Proceedings of the 2002 Congress on Evolutionary Computation (CEC’2002), Honolulu, HI, USA, 12–17 May 2002; pp. 1671–1676. [Google Scholar] [CrossRef] [Green Version]
- Hakli, H.; Uǧuz, H. A novel particle swarm optimization algorithm with Levy flight. Appl. Soft Comput. J. 2014, 23, 333–345. [Google Scholar] [CrossRef]
- Sayah, S.; Hamouda, A. A hybrid differential evolution algorithm based on particle swarm optimization for nonconvex economic dispatch problems. Appl. Soft Comput. J. 2013, 13, 1608–1619. [Google Scholar] [CrossRef]
- Sedki, A.; Ouazar, D. Hybrid particle swarm optimization and differential evolution for optimal design of water distribution systems. Adv. Eng. Inform. 2012, 26, 582–591. [Google Scholar] [CrossRef]
- Montes de Oca, M.A.; Stützle, T.; Birattari, M.; Dorigo, M. Frankenstein’s PSO: A composite particle swarm optimization algorithm. IEEE Trans. Evol. Comput. 2009, 13, 1120–1132. [Google Scholar] [CrossRef]
- Li, C.; Yang, S.; Nguyen, T.T. A self-learning particle swarm optimizer for global optimization problems. IEEE Trans. Syst. Man. Cybern. Part B Cybern. 2012, 42, 627–646. [Google Scholar] [CrossRef]
- Liang, J.J.; Suganthan, P.N. Dynamic Multi-Swarm Particle Swarm Optimizer. In Proceedings of the 2005 IEEE Swarm Intelligence Symposium (SIS 2005), Pasadena, CA, USA, 8–10 June 2005; pp. 1–6. [Google Scholar]
- Zhan, Z.H.; Zhang, J.; Li, Y.; Chung, H.S.H. Adaptive particle swarm optimization. IEEE Trans Syst. Man. Cybern. Part B Cybern. 2009, 39, 1362–1381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, Y.J.; Ling, H.F.; Guan, Q. Adaptive parameters for a modified comprehensive learning particle swarm optimizer. Math. Probl. Eng. 2012, 2012, 207318. [Google Scholar] [CrossRef]
- Xu, G. An adaptive parameter tuning of particle swarm optimization algorithm. Appl. Math. Comput. 2013, 219, 4560–4569. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Shi, Y. Comparing inertia weights and constriction factors in particle swarm optimization. In Proceedings of the 2000 Congress on Evolutionary Computation (CEC’2000), La Jolla, CA, USA, 16–19 July 2000; pp. 84–88. [Google Scholar] [CrossRef]
- Shafiee, S.; Fotuhi-Firuzabad, M.; Rastegar, M. Investigating the impacts of plug-in hybrid electric vehicles on power distribution systems. IEEE Trans. Smart Grid 2013, 4, 1351–1360. [Google Scholar] [CrossRef]
- Hou, Y.T.; Shi, Y.; Sherali, H.D. Applied Optimization Methods for Wireless Networks; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Description of the Abbreviation |
|---|---|
| Nodes | 50 |
| Area length and width | 100, 200, 300, 400, 500 m |
| RS, BS | center |
| U | 5 W |
| V | 5 m/s |
| λ | 0.85 |
| Electricity quantity | 2.5 Ah |
| Emax | 10.8 KJ |
| Emin | 0.05 × Emax |
| Data rate Ri | [1, 10] kb/s |
| β1 | 50 nJ/b |
| β2 | 0.0013 pJ/b/m4 |
| α | 4 |
| ρ | 50 nJ/b |
| Inertia weight ω | 2.1 |
| Cognitive coefficient c1 | 2.24 |
| Social coefficient c2 | 1.8 |
| Number of particles m | 20 |
| PSO iterations | 50 |
| Node Index | Location (m) | Data Rate (kb/s) | Node Index | Location (m) | Data Rate (kb/s) | Node Index | Location (m) | Data Rate (kb/s) |
|---|---|---|---|---|---|---|---|---|
| 1 | (42, 20) | 5 | 18 | (67, 26) | 3 | 35 | (40, 85) | 9 |
| 2 | (27, 61) | 3 | 19 | (92, 68) | 4 | 36 | (76, 43) | 3 |
| 3 | (76, 2) | 2 | 20 | (58, 58) | 1 | 37 | (58, 40) | 9 |
| 4 | (43, 72) | 3 | 21 | (29, 81) | 7 | 38 | (35, 35) | 4 |
| 5 | (22, 93) | 8 | 22 | (32, 47) | 6 | 39 | (29, 69) | 7 |
| 6 | (53, 74) | 4 | 23 | (22, 15) | 8 | 40 | (75, 96) | 6 |
| 7 | (49, 91) | 7 | 24 | (91, 43) | 10 | 41 | (65, 50) | 10 |
| 8 | (20, 40) | 8 | 25 | (92, 82) | 6 | 42 | (18, 26) | 6 |
| 9 | (94, 28) | 2 | 26 | (76, 65) | 6 | 43 | (28, 9) | 8 |
| 10 | (17, 78) | 7 | 27 | (6, 96) | 5 | 44 | (70, 58) | 3 |
| 11 | (92, 96) | 1 | 28 | (7, 52) | 10 | 45 | (61, 7) | 2 |
| 12 | (93, 14) | 5 | 29 | (46, 4) | 9 | 46 | (3, 81) | 7 |
| 13 | (79, 30) | 8 | 30 | (66, 79) | 9 | 47 | (4, 34) | 5 |
| 14 | (8, 21) | 3 | 31 | (86, 7) | 6 | 48 | (47, 62) | 2 |
| 15 | (87, 57) | 10 | 32 | (57, 84) | 7 | 49 | (64, 19) | 2 |
| 16 | (55, 28) | 8 | 33 | (17, 68) | 3 | 50 | (9, 7) | 3 |
| 17 | (9, 72) | 5 | 34 | (31, 93) | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukase, S.; Xia, K.; Umar, A.; Owoola, E.O. On-Demand Charging Management Model and Its Optimization for Wireless Renewable Sensor Networks. Sensors 2022, 22, 384. https://doi.org/10.3390/s22010384
Mukase S, Xia K, Umar A, Owoola EO. On-Demand Charging Management Model and Its Optimization for Wireless Renewable Sensor Networks. Sensors. 2022; 22(1):384. https://doi.org/10.3390/s22010384
Chicago/Turabian StyleMukase, Sandrine, Kewen Xia, Abubakar Umar, and Eunice Oluwabunmi Owoola. 2022. "On-Demand Charging Management Model and Its Optimization for Wireless Renewable Sensor Networks" Sensors 22, no. 1: 384. https://doi.org/10.3390/s22010384