
A Remote Calibration Device Using Edge Intelligence

Abstract
:1. Introduction
- We propose a remote calibration device that incorporates edge intelligence to improve the efficiency of calibration work and reduce costs;
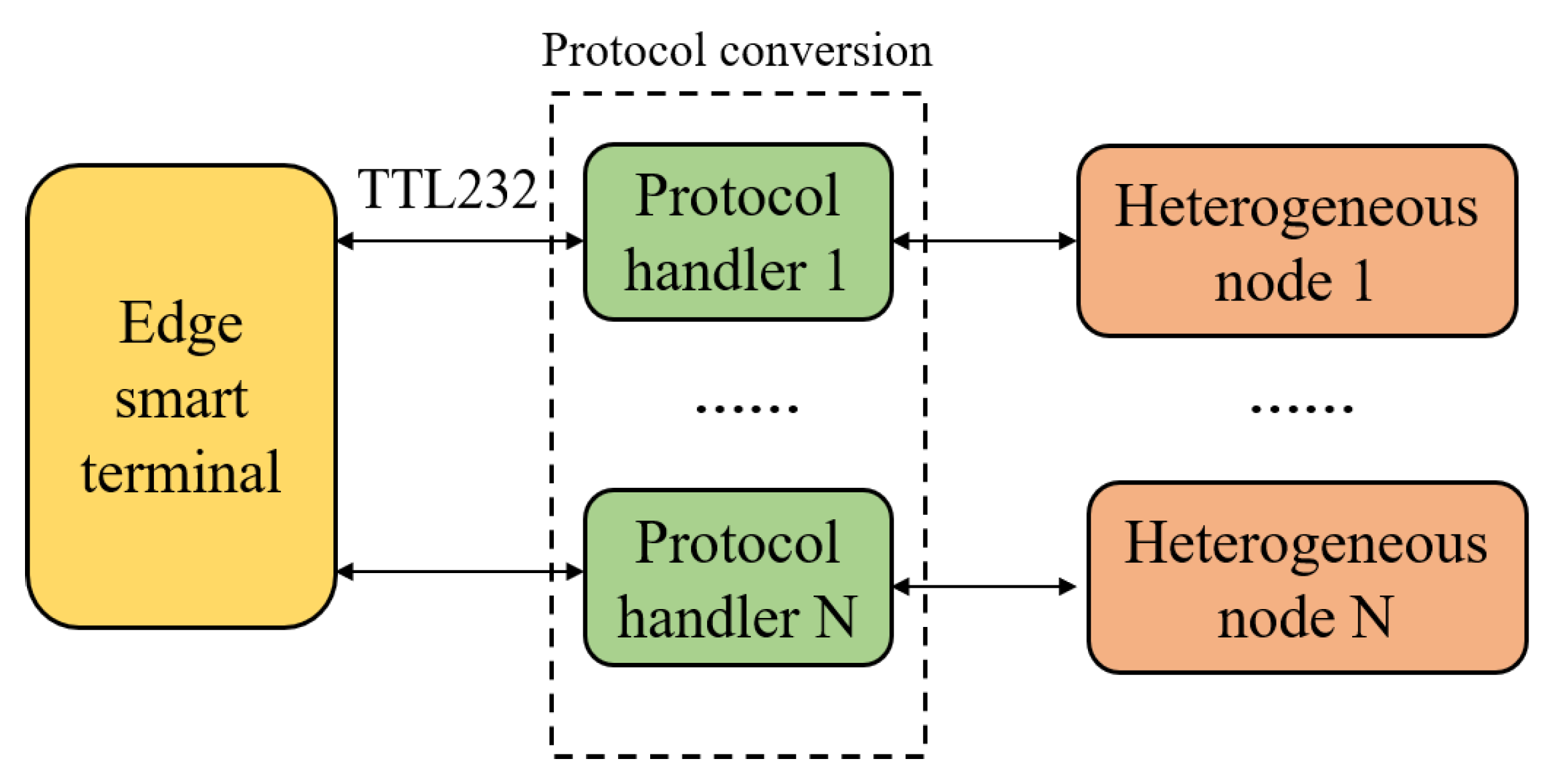
- We combine a variety of heterogeneous edge devices to make remote calibration better networked;
- We propose a smart meter reading method in our device that is based on artificial intelligence to obtain information about calibration equipment and improves the intelligence.
2. Related Work
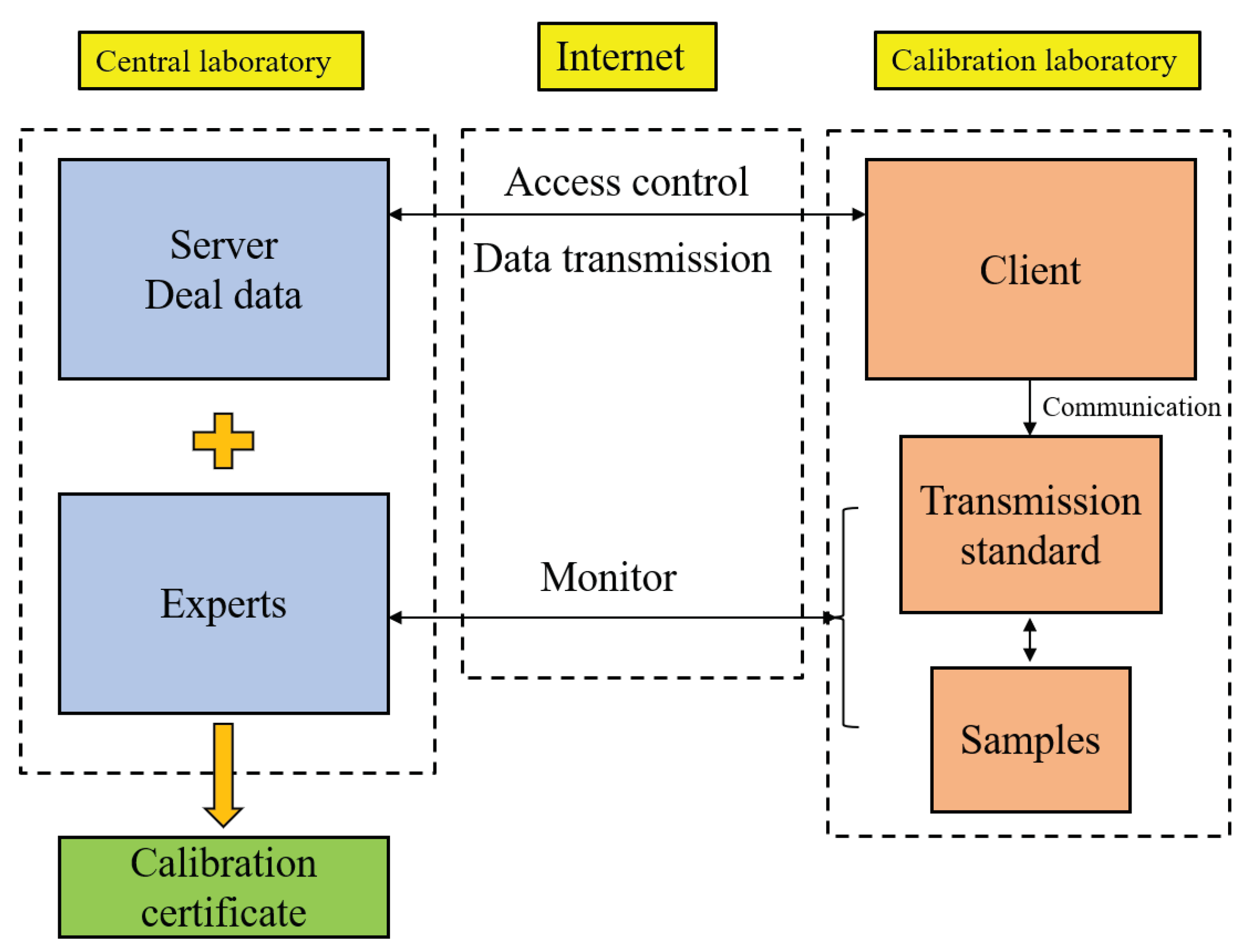
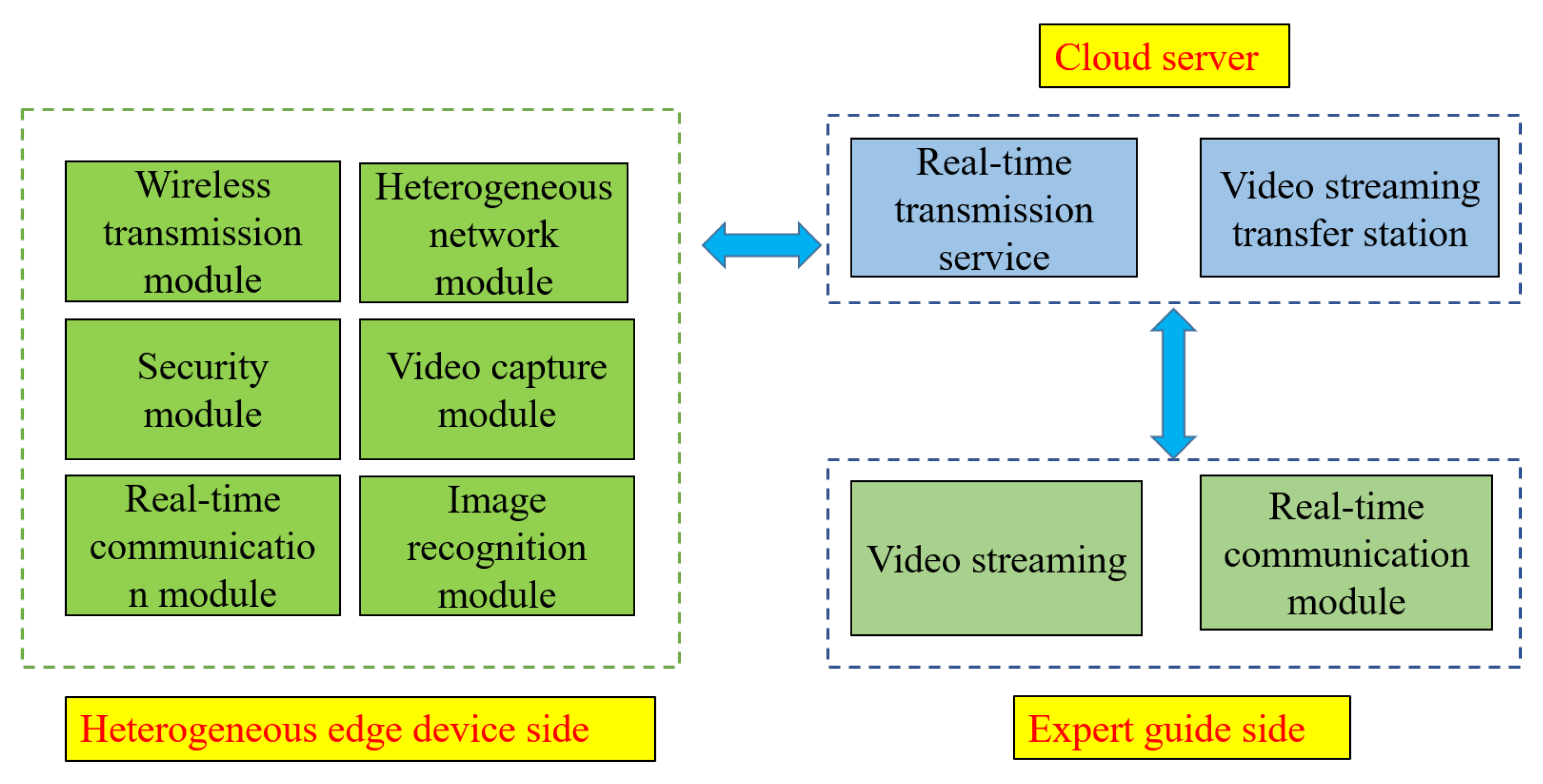
3. Overall Functional Architecture
- Real-time video content transmission: video capture module needs to collect real-time video information and send it to the expert guide, and supports many-to-one. One expert guide can support multiple calibration processes based on it;
- Real-time sensor data transmission: the sensor information collected by heterogeneous network equipment should be transmitted to the expert guidance terminal in real time to facilitate the analysis of the calibration process. In this paper, it mainly refers to the meter information collected by the camera. In addition, there is some temperature and humidity information in the calibration laboratory;
- Character recognition of special electric meters: for the test data on some special electric meters, the camera is used to read the meter, the text recognition technology is used to identify the text and data in the meter, and the data need to be transferred to the database through XMPP. It communicates with the computer interactively and sends it to the database to complete the real-time collection and recording of test data.
4. Materials and Methods
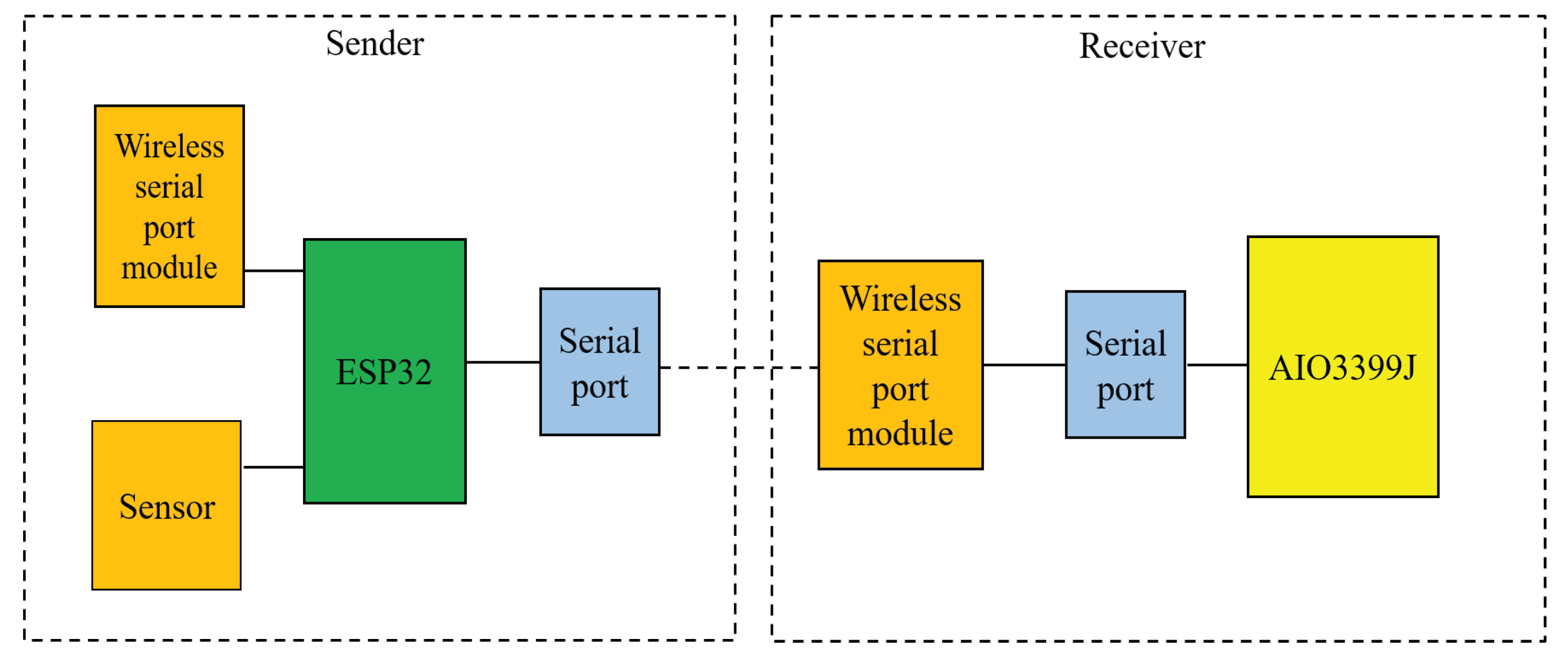
4.1. Wireless Serial Port Module
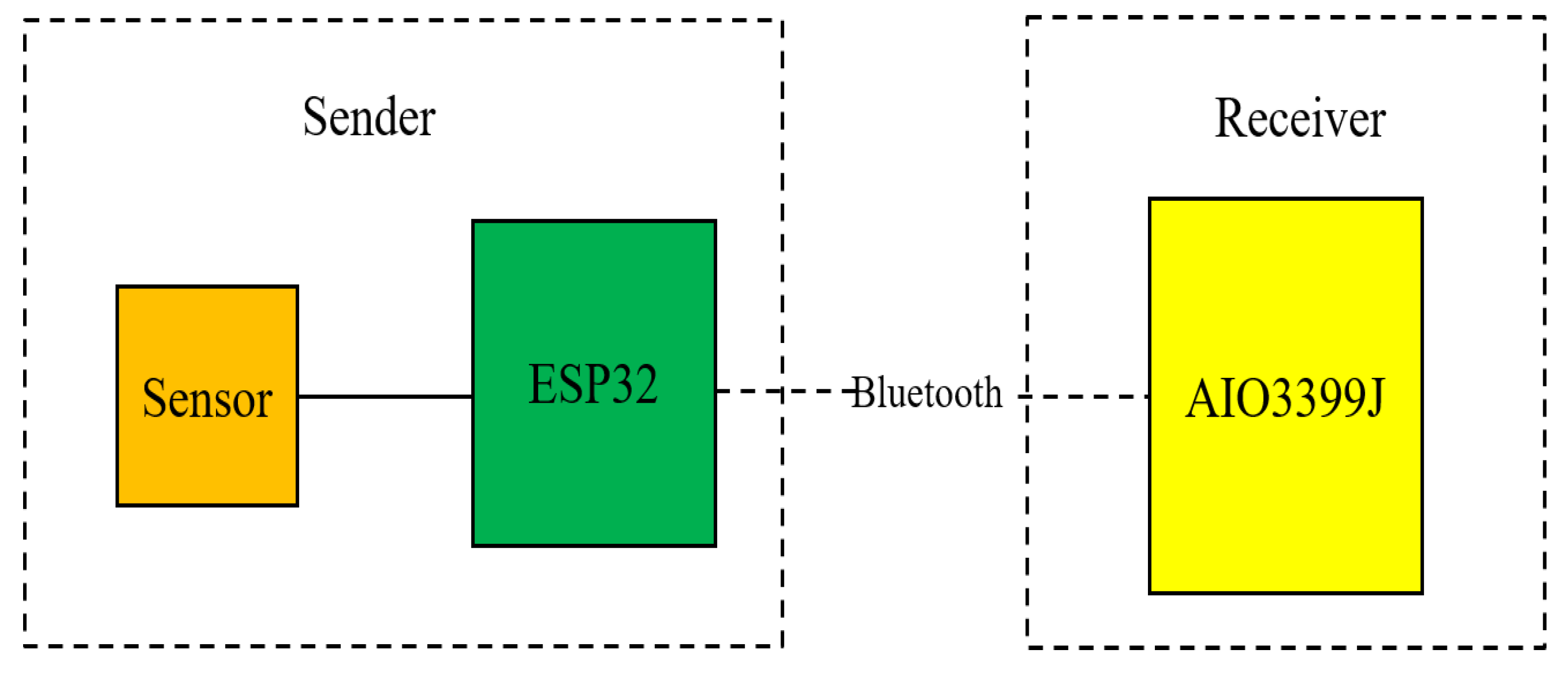
4.2. Bluetooth Module
4.3. XMPP Module
4.4. Text Recognition Module
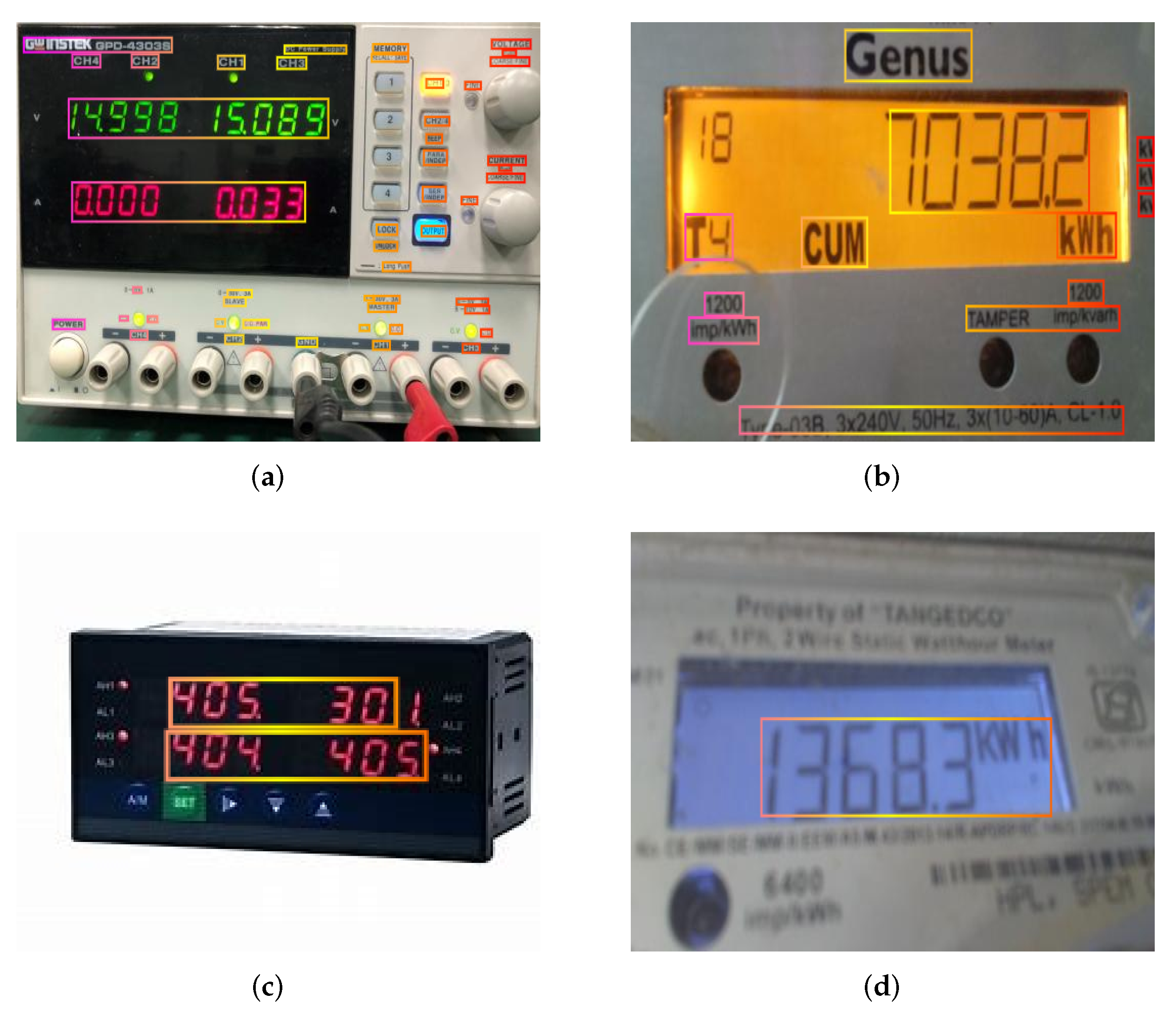
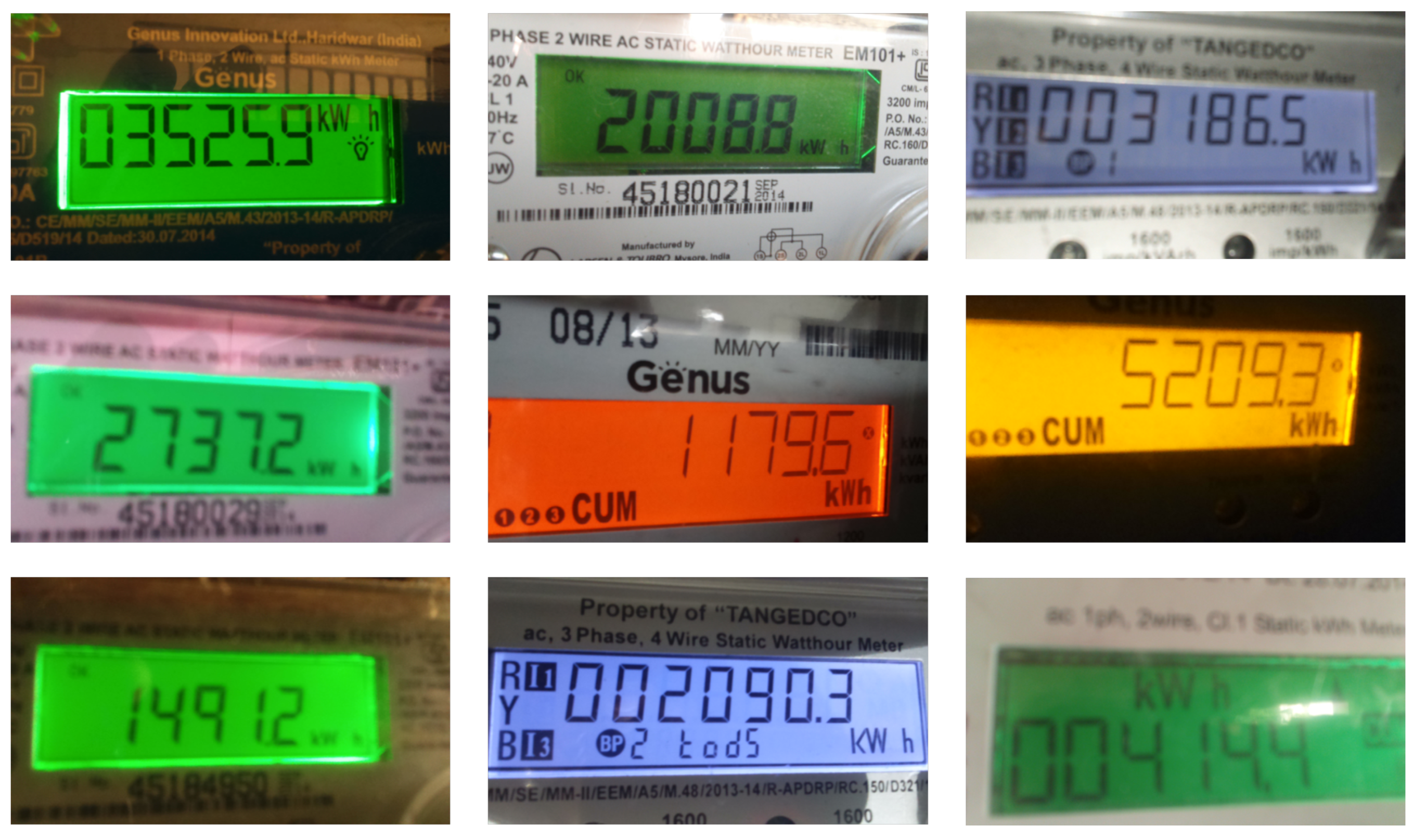
4.4.1. Image Acquisition
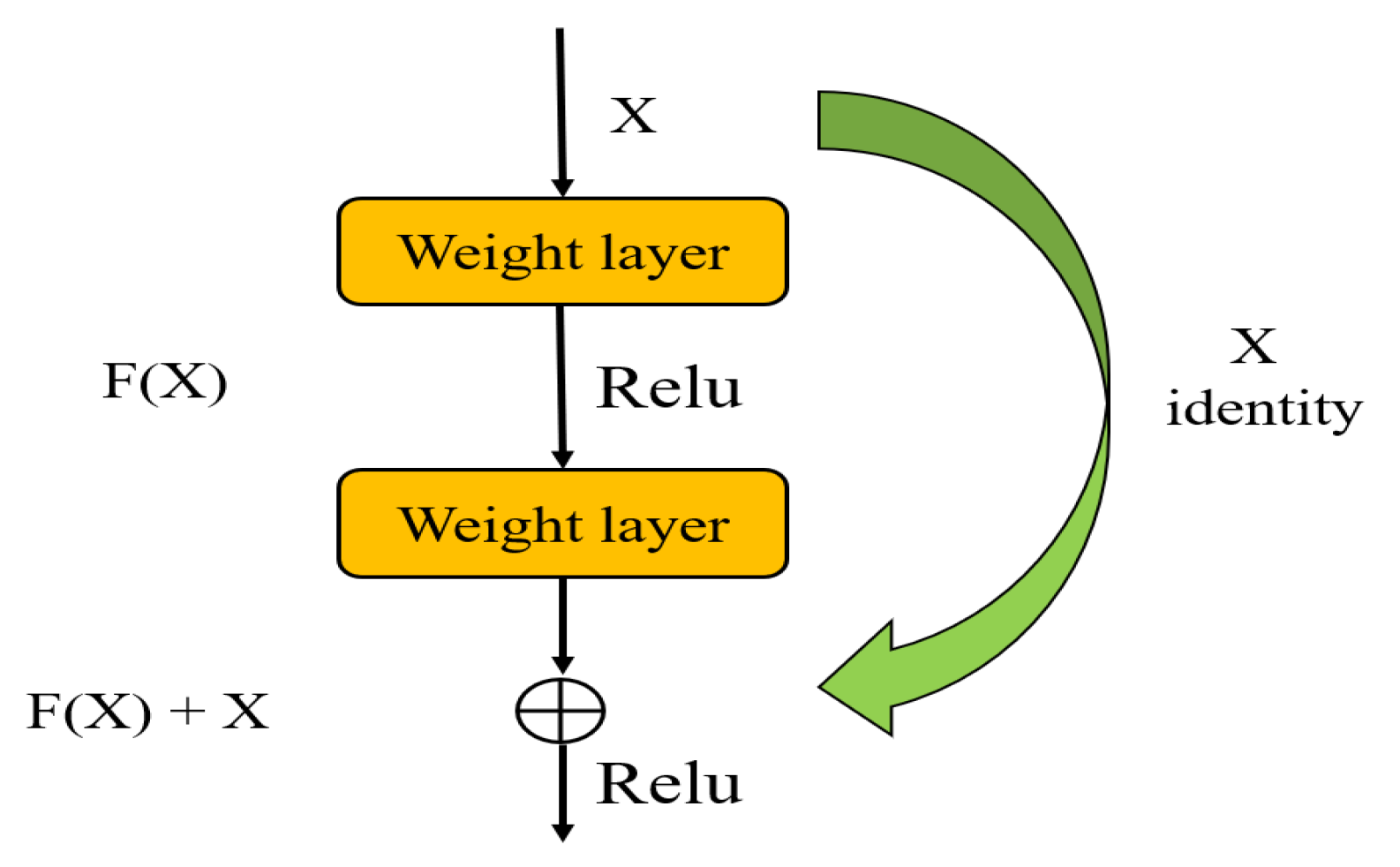
4.4.2. Meter Recognition
- Text detection.
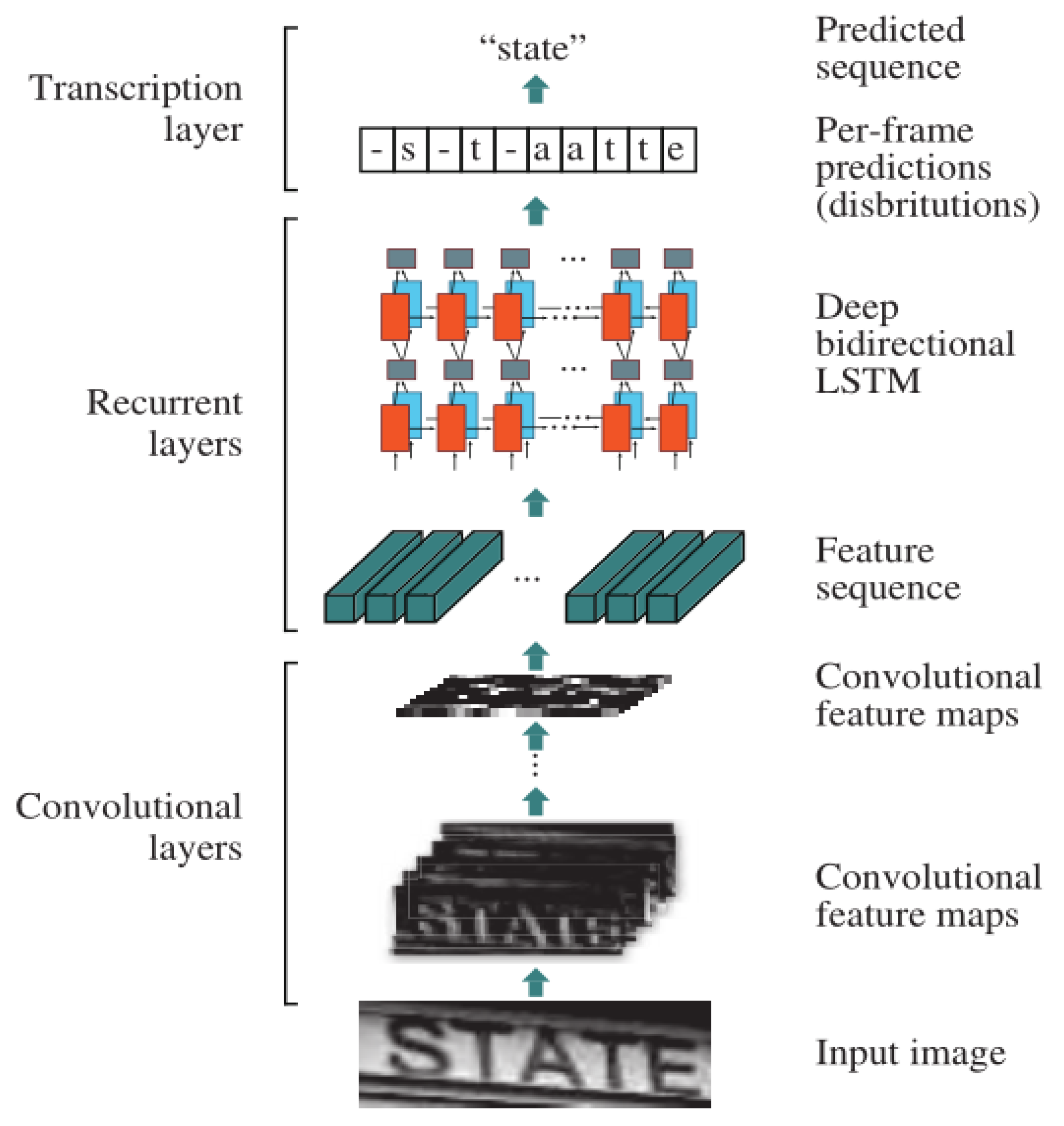
- Text recognition.
4.4.3. Text Parsing
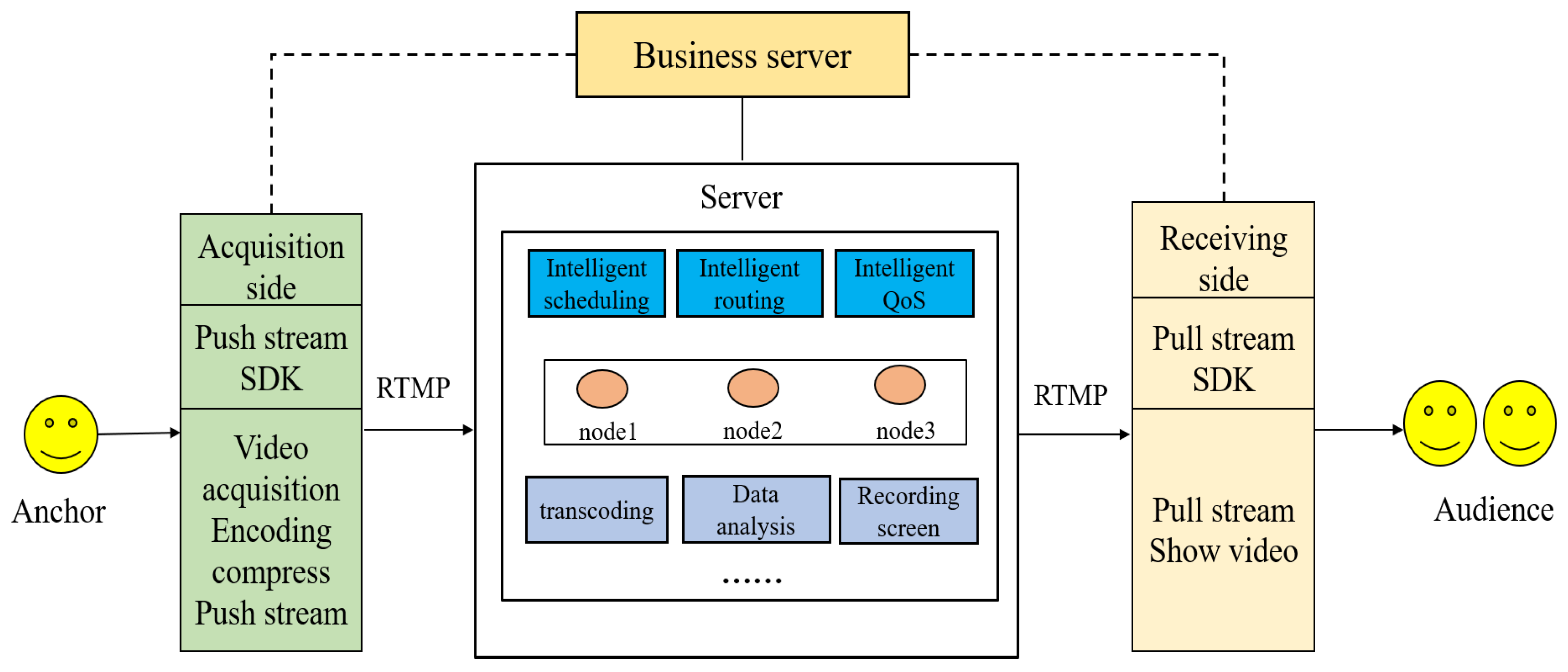
4.5. Live Video Module
5. Results
5.1. Part of Live Video
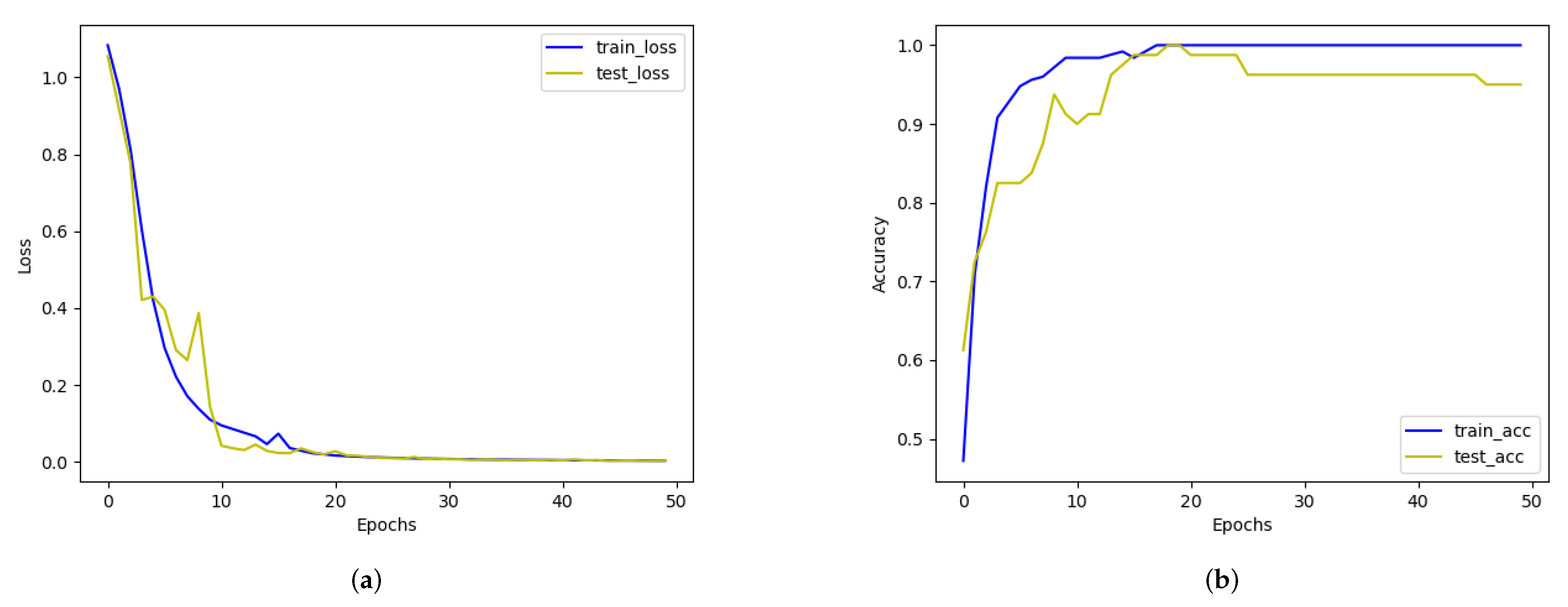
5.2. Part of Text Recognition
5.3. Part of XMPP
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EAST | Efficient and Accurate Scene Text Detector |
| CRNN | Convolutional Recurrent Neural Network |
| CTC | Connectionist Temporal Classification |
| LSTM | Long Short Term Memory |
| FCN | Fully Convolutional Network |
| XMPP | Extensible Messaging and Presence Protocol |
| RTMP | Real Time Messaging Protocol |
| OCR | Optical Character Recognition |
| NIST | National Institute of Standards and Technology |
| FITP | Federal Institute of Physics and Technology |
| NMIJ | National Measurement Institute of Japan |
| NPL | National Physical Laboratory |
References
- Li, M.; Yang, S.C.; Liu, W.J. Research and Development on Remote Calibration System for Electric Vehicles. Appl. Mech. Mater. 2014, 535, 91–96. [Google Scholar] [CrossRef]
- Becker, R.; Koppa, A.; Schulz, S.; Usman, M.; aus der Beek, T.; Schüth, C. Spatially distributed model calibration of a highly managed hydrological system using remote sensing-derived ET data. J. Hydrol. 2019, 577, 123944. [Google Scholar] [CrossRef]
- Ma, W.; Zhang, Y.; Xia, Z.; Ma, C.; Liu, Y.; Si, Y.; Cheng, P.F.; Sun, F.W.; He, L.; Liu, C.Y. Remote Calibration System in Metering Device. Appl. Mech. Mater. 2014, 602–605, 2535–2538. [Google Scholar] [CrossRef]
- Mellit, A.; Benghanem, M.; Herrak, O.; Messalaoui, A. Design of a Novel Remote Monitoring System for Smart Greenhouses Using the Internet of Things and Deep Convolutional Neural Networks. Energies 2021, 14, 5045. [Google Scholar] [CrossRef]
- Gunawan, T.S.; Anuar, M.H.; Mira, K.; Zuriati, J. Design of power factor meter using internet of things for power factor improvement remote monitoring and data logging. Indones. J. Electr. Eng. Comput. Sci. 2020, 17, 700–709. [Google Scholar] [CrossRef] [Green Version]
- Tian, W.; Wang, X.; Yang, Z.; Li, Q.; Sun, L.; Wang, D.; Wang, Z. A Remote Automatic Detection And Calibration Device for AC Watt-hour Meters. J. Phys. Conf. Ser. 2021, 2005, 012226. [Google Scholar] [CrossRef]
- Han, K.; Ding, C.; Yu, L.; Chen, Q. Research on the Application of Time and Frequency Remote Calibration Based on NIMDO. Metrol. Sci. Technol. 2021, 65, 9–12. [Google Scholar]
- Jeang, Y.L.; Chen, L.B.; Huang, C.P.; Hsu, Y.H.; Yeh, M.Y.; Yang, K.M. Design of FPGA-based adaptive remote calibration control system. In Proceedings of the 2003 IEEE International Conference on Field-Programmable Technology (FPT) (IEEE Cat. No.03EX798), Tokyo, Japan, 17 December 2003; pp. 299–302. [Google Scholar] [CrossRef]
- Uchida, S. Text Localization and Recognition in Images and Video. In Handbook of Document Image Processing and Recognition; Doermann, D., Tombre, K., Eds.; Springer: London, UK, 2014; pp. 843–883. [Google Scholar] [CrossRef]
- Ye, Q.; Doermann, D. Text Detection and Recognition in Imagery: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1480–1500. [Google Scholar] [CrossRef]
- Zhu, Y.; Yao, C.; Bai, X. Scene text detection and recognition: Recent advances and future trends. Front. Comput. Sci. 2016, 10, 19–36. [Google Scholar] [CrossRef]
- Shi, B.; Bai, X.; Yao, C. An End-to-End Trainable Neural Network for Image-Based Sequence Recognition and Its Application to Scene Text Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2298–2304. [Google Scholar] [CrossRef] [Green Version]
- Bermudez, H.F.; Sanchez-Iborra, R.; Arciniegas, J.L.; Campo, W.Y.; Cano, M.D. Statistical validation of an LTE emulation tool using live video streaming over reliable transport protocols. Telecommun. Syst. 2019, 71, 491–504. [Google Scholar] [CrossRef]
- Gupta, D.; Shivankar, J.; Gugulothu, S. Instant messaging using xmpp. J. Phys. Conf. Ser. 2021, 1913, 012126. [Google Scholar] [CrossRef]
- Serik, M.; Balgozhina, G.B. Instant messaging application for Smartphone. Life Sci. J. 2014, 11, 258–262. [Google Scholar]
- Liu, W. Smart Home System with Bluetooth and Wi-Fi as Communication Mode. Int. Core J. Eng. 2021, 7, 379–390. [Google Scholar]
- Hassan, M.B.; Ali, E.S.; Mokhtar, R.A.; Saeed, R.A.; Chaudhari, B.S. 6-NB-IoT: Concepts, applications, and deployment challenges. In LPWAN Technologies for IoT and M2M Applications; Chaudhari, B.S., Zennaro, M., Eds.; Academic Press: London, UK, 2020; pp. 119–144. [Google Scholar] [CrossRef]
- Lavric, A. LoRa (Long-Range) High-Density Sensors for Internet of Things. J. Sens. 2019, 2019, 3502987. [Google Scholar] [CrossRef]
- Ali, A.I.; Partal, S.Z.; Kepke, S.; Partal, H.P. ZigBee and LoRa based Wireless Sensors for Smart Environment and IoT Applications. In Proceedings of the 2019 1st Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkey, 12–15 June 2019; pp. 19–23. [Google Scholar]
- Berson, A. Client-Server Architecture. In Encyclopedia of Multimedia; Springer: Boston, MA, USA, 2006; pp. 50–51. [Google Scholar]
- Xiong, W.; Sun, C.; Fang, C.; Huang, Z. Research and Implementation of Cross-Platform EIM Client Based on Smack. In Proceedings of the 2009 International Conference on Computational Intelligence and Software Engineering, Wuhan, China, 11–13 December 2009; pp. 1–4. [Google Scholar]
- Memon, J.; Sami, M.; Khan, R.A. Handwritten Optical Character Recognition (OCR): A Comprehensive Systematic Literature Review (SLR). IEEE Access 2020, 8, 142642–142668. [Google Scholar] [CrossRef]
- Pratikakis, I.; Zagoris, K.; Karagiannis, X.; Tsochatzidis, L.; Mondal, T.; Marthot-Santaniello, I. ICDAR 2019 Competition on Document Image Binarization (DIBCO 2019). In Proceedings of the 2019 International Conference on Document Analysis and Recognition (ICDAR), Sydney, Australia, 20–25 September 2019; pp. 1547–1556. [Google Scholar]
- Zhang, Z.; Hua, Z.; Tang, Y.; Zhang, Y.; Lu, W.; Dai, C. Recognition Method of Digital Meter Readings in Substation Based on Connected Domain Analysis Algorithm. Actuators 2021, 10, 170. [Google Scholar] [CrossRef]
- Yang, M.A.; Slatkin, M. Using Ancient Samples in Projection Analysis. G3 Genes|Genomes|Genet. 2015, 6, 99–105. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Hu, W.; Maybank, S.J. AdaBoost-Based Algorithm for Network Intrusion Detection. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2008, 38, 577–583. [Google Scholar]
- Huang, S.; Cai, N.; Pacheco, P.P.; Narrandes, S.; Wang, Y.; Xu, W. Applications of Support Vector Machine (SVM) Learning in Cancer Genomics. Cancer Genom. Proteom. 2018, 15, 41–51. [Google Scholar]
- Islam, S.; Khan, S.I.A.; Abedin, M.M.; Habibullah, K.M.; Das, A.K. Bird Species Classification from an Image Using VGG-16 Network. In Proceedings of the 2019 7th International Conference on Computer and Communications Management, Bangkok, Thailand, 27–29 July 2019. [Google Scholar]
- He, F.; Liu, T.; Tao, D. Why ResNet Works? Residuals Generalize. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5349–5362. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A Search Space Odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2222–2232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.; Sun, F.; Zhang, X.; Zheng, L. License Plate Recognition Model Based on CNN + LSTM + CTC; Springer: Singapore, 2019; pp. 657–678. [Google Scholar] [CrossRef]
- Karatzas, D.; Shafait, F.; Uchida, S.; Iwamura, M.; Bigorda, L.; Mestre, S.; Mas, J.; Mota, D.; Almazan, J.; De Las Heras, L. ICDAR 2013 robust reading competition. In Proceedings of the International Conference on Document Analysis and Recognition, Washington, DC, USA, 25–28 August 2013; pp. 1484–1493. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Yao, C.; Wen, H.; Wang, Y.; Zhou, S.; He, W.; Liang, J. EAST: An Efficient and Accurate Scene Text Detector. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2642–2651. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Shen, W.; Yao, C.; Bai, X. Symmetry-based text line detection in natural scenes. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 2558–2567. [Google Scholar] [CrossRef]
- Shi, B.; Bai, X.; Belongie, S. Detecting Oriented Text in Natural Images by Linking Segments. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 3482–3490. [Google Scholar] [CrossRef] [Green Version]
- He, P.; Huang, W.; He, T.; Zhu, Q.; Qiao, Y.; Li, X. Single Shot Text Detector with Regional Attention. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- He, W.; Zhang, X.Y.; Yin, F.; Liu, C.L. Deep Direct Regression for Multi-oriented Scene Text Detection. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 745–753. [Google Scholar] [CrossRef] [Green Version]
- Bissacco, A.; Cummins, M.; Netzer, Y.; Neven, H. PhotoOCR: Reading Text in Uncontrolled Conditions. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 785–792. [Google Scholar] [CrossRef] [Green Version]
- Jaderberg, M.; Simonyan, K.; Vedaldi, A.; Zisserman, A. Reading Text in the Wild with Convolutional Neural Networks. arXiv 2014, arXiv:1412.1842. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Institute | Remote Calibration Projects |
|---|---|
| NIST | measurement networks, electrical quantity calibration, high flow gas flow meters, etc. |
| FIPT | electronic calibration, AC Josephson Voltage reference, high pressure gas flow reference, etc. |
| NMIJ | temperature, pressure, optical frequency Coordinate measuring machine, radiation, etc. |
| NPL | Standard resistance, voltage remote calibration, network analyzer, etc. |
| Lossless Network | None | None |
|---|---|---|
| Up weak network | Up packet loss | 30%, 50%, 70% |
| Up weak network | Up delay | 200, 400, 700 (ms) |
| Down weak network | Down packet loss | 30%, 50%, 70% |
| Down weak network | Down delay | 300, 500, 1000 (ms) |
| Packet Loss | Room Login | Stream Pulling |
|---|---|---|
| Up packet loss 30% | 100% | 100% |
| Up packet loss 50% | 100% | 100% |
| Up packet loss 70% | 100% | 100% |
| Down packet loss 30% | 100% | 100% |
| Down packet loss 50% | 100% | 100% |
| Down packet loss 70% | 100% | 100% |
| Datasets | Accuracy (%) | Recall (%) | F-Measure (%) |
|---|---|---|---|
| ICDAR2013 [32] | 88.0 | 74.0 | 81.0 |
| ICDAR2015 [33] | 83.27 | 78.33 | 80.72 |
| Ours | 93.3 | 87.5 | 88.0 |
| Model Name | Train Loss | Test Loss | Train acc | Test acc | Recall | F1 Score |
|---|---|---|---|---|---|---|
| CNN + LSTM + CTC | 0.1117 | 0.1122 | 0.9713 | 0.9343 | 0.932 | 0.9307 |
| Methods | Accuracy (%) | Recall (%) | F-Measure (%) |
|---|---|---|---|
| Zhang et al. [34] | 70.8 | 43.0 | 53.6 |
| SegLink [35] | 73.1 | 76.8 | 75.0 |
| EAST [33] | 83.3 | 78.3 | 80.7 |
| SSTD [36] | 80.0 | 73.0 | 77.0 |
| He et al. [37] | 82.0 | 80.0 | 81.0 |
| Methods | Accuracy (%) |
|---|---|
| Bissacco et al. [38] | 87.6 |
| Jaderberg et al. [39] | 81.8 |
| CRNN [12] | 89.6 |
| Items | Index Description |
|---|---|
| Current | Measuring range (0.1–50) mA |
| Maximum allowable error ± (0.2% for reading + 2 μA) | |
| Phase | Measuring range (0–90 degree) |
| Maximum allowable error ±0.1 degree |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Li, H.; Wang, H.; Zhang, J.; Fu, J. A Remote Calibration Device Using Edge Intelligence. Sensors 2022, 22, 322. https://doi.org/10.3390/s22010322
Wang Q, Li H, Wang H, Zhang J, Fu J. A Remote Calibration Device Using Edge Intelligence. Sensors. 2022; 22(1):322. https://doi.org/10.3390/s22010322
Chicago/Turabian StyleWang, Quan, Hongbin Li, Hao Wang, Jun Zhang, and Jiliang Fu. 2022. "A Remote Calibration Device Using Edge Intelligence" Sensors 22, no. 1: 322. https://doi.org/10.3390/s22010322