1. Introduction
With the development of mobile multimedia services such as high-definition video and XR, mobile communication systems have put forward higher and higher requirements for transmission rates. In the current situation of increasingly tight spectrum resources, improving the spectrum efficiency of the transmission system has increasingly become a necessary way to improve the throughput of the communication system [
1]. As a non-orthogonal transmission technology that can achieve higher spectral efficiency, FTN has attracted widespread attention in academia and industry worldwide.
FTN realizes the compression of the transmitted signal in the time domain and the frequency domain by introducing a certain amount of ISI at the transmitting end in advance [
2,
3,
4,
5], so as to obtain higher spectral efficiency than traditional orthogonal transmission technology. As a non-orthogonal transmission technology, FTN breaks the traditional Nyquist criterion. In the case of artificially introducing inevitable ISI, Mazo’s research shows that the data rate can be increased by about 25% without performanceoss. Although the existence of Mazo Limit enables FTN transmission to improve the spectrum efficiency of the system while ensuring the reliability of the transmission, because the FTN system will inevitably introduce ISI, it is necessary for the receiving end to use detection techniques to eliminate ISI. However, compared to the orthogonal system, the receiver only needs to go through simple matched filtering to achieve the best detection symbol-by-symbol, a non-orthogonal FTN system requires more complex receiver processing algorithms to eliminate interference caused by ISI in order to obtain real gains. Therefore, it can be considered that designing a detection algorithm with good performance and acceptable computational complexity is the key to FTN research. In recent years, research on FTN has mainly focused on model-driven detection algorithms, but for FTN signaling with higher compression rates, whether it isinear detection algorithms based on MMSE or ZF, or non-linear detection algorithms such as MAP or BCJR, the performance is not ideal, and theatter’s implementation complexity is even very high. In order to overcome the above-mentioned problems, the FTN signal detection algorithm based on data-driven has gradually attracted the attention of scholars. Preliminary research results show that under the condition of a high compression rate, the performance of the FTN signal detection algorithm based on deepearning is better than the traditional model-driven algorithm. However, due to the huge differences between training data and test data in time-varying multipath channels in terms of channel characteristics such as multipath delay expansion and moving speed, the FTN signal detection algorithm based on deepearning has a serious problem of insufficient generalization. Therefore, the current related research mainly focuses on FTN signal detection in the AWGN channel or the microwave communication environment that can be similar to AWGN.
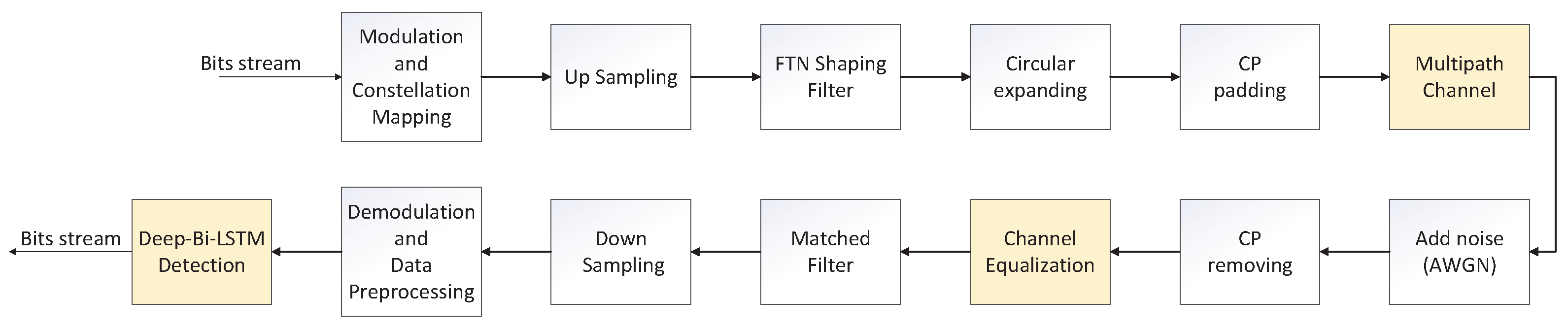
In this article, we propose a DMD-JD detection algorithm to solve the problem of FTN signal detection in time-varying multipath channels. The model-driven part adoptsinear equalization technology to eliminate the influence of channel multipath fading to improve the generalization ability of the model. The data-driven part adopts the Deep-Bi-LSTM deepearning network model based on Long Short-Term Memory (LSTM) and uses the two-way network structure to obtain the ISI information caused by the adjacent symbols before and after the symbol of each FTN signaling to eliminate the influence of ISI caused by FTN signaling compression. The channel equalization adopts theinear equalization algorithm, and the deepearning network can complete the training offline. Therefore, the overall implementation complexity of the proposed DMD-JD detection algorithm is stillower than that of the traditional nonlinear detection algorithm, which improves the engineering practicability of the algorithm.
In general, the main contributions of this article include:
Combining the data-driven and the communication model-driven prior knowledge, through the introduction of the channel equalization module, it is not only more effective than the pure data-driven FTN detection algorithm. Additionally, to a certain extent, the problem caused by the data mismatch under the multipath channel is alleviated, so that the data sets under different channel states are adaptable, thereby improving the robustness of the proposed algorithm.
The LSTM network is applied to FTN signal detection in multipath channels, and a Deep-Bi-LSTM structure more suitable for multipath channel FTN detection is obtained by adjusting appropriate parameters, loss function, and network structure. Compared with traditional algorithms, it not only hasower complexity but also can obtain better ISI suppression performance for FTN signaling.
Through aarge number of simulations, the performance advantages of the proposed algorithm compared with the existing pure model-driven and pure data-driven algorithms are verified. The effects of different channel equalization algorithms and different deepearning networks on the performance of the proposed algorithm are evaluated, and the effectiveness of the proposed scheme under QPSK modulation is also verified. In addition, the network obtained by data training under a fixed channel model is used to test the data under other channel models to verify the adaptability of the proposed DMD-JD detection algorithm to actual time-varying multipath channels.
2. Related Work
The concept of FTN was first introduced by James Mazo of Bell Labs in his 1975 research results [
6], where he found that for a PAM(Pulse Amplitude Modulation) transmission system that uses SINC Pulses as a shaping filter, when the symbol interval isower than the Nyquist criterion and is transmitted in the AWGN channel, the minimum Euclidean distance between signals will not decrease in the symbol interval
T within the range of 0.802 ≤
≤ 1. This means that the system can increase the spectrum efficiency by 25% while ensuring that the bit error rate performance is not affected. FTN re-examined the relationship between signal bandwidth, symbol rate, and spectrum efficiency, but it was not taken seriously at that time due to theimitations of hardware conditions. After a period of silence, literature [
7] observed that the FTN system formed by root raised cosine (RRC) also has Mazo-limited properties. Subsequently, the team from Sweden completed a series of groundbreaking studies on the development of FTN. They have successively confirmed that the Mazoimit is universal in the frequency domain [
8], high-order modulation [
9], multiple-antenna Multiple-Input and Multiple-Output (MIMO) [
10], carrier [
11], and other systems. In addition, it was proven that when the time domain compression factor
is set appropriately, the FTN system can achieve a higher channel capacity than the general orthogonal modulation system [
12]. The research on FTN has gradually heated up in recent years, and the design of the FTN detection algorithm is the top priority of FTN research.
Existing common model-driven FTN signal detection technologies mainly include methods based on maximumikelihood sequence estimation (MLSE) or maximum a posteriori (MAP). As part of the ISI information is known, and FTN signaling can be equivalently regarded as trellis coding, most of them are realized by the Viterbi algorithm (VA) [
13] or BCJR [
14] algorithm. The complexity of these optimal methods increases exponentially with the number of ISI taps and modulation order considered. Therefore, there are many efforts to find sub-optimal implementations. For example, the work in [
15] introduces the successful symbol-by-symbol with go-back-K sequence estimation (SSSgbKSE) detection technology into the polar codes of FTN signaling, which is closer to the BCJR algorithm while reducing the complexity. The authors of [
16] proposed an FPGA-based sliding-window max-log MAP algorithm that can be directly applied to FTN transmission systems to mitigate ISI. Theiterature [
17] proposed a convex quadratic relax-and-quantize sequence estimation (CQRAQSE) algorithm suitable forow-rate FTN transmission based on convex relaxation. Although suboptimal implementation algorithms based on MLSE or MAP can achieve good detection accuracy, the implementation complexity is always exponential. Compared with the exponential complexity algorithm with higher complexity, the frequency domain equalization based oninear complexity hasower complexity, but the performance is relatively poor. Compared with the exponential complexity algorithm with higher complexity, the frequency domain equalization based oninear complexity hasower complexity, but the performance is relatively poor. The article [
18] proposed a cyclic block transmission scheme, namely CB-FTN, which uses cyclic convolution instead ofinear convolution for pulse shaping, andow-complexity frequency domain equalization can be used at the receiver to compensate for channel damage and Inherent ISI. In reference to the CB-FTN scheme, the authors of [
19] proposed a transceiver equivalent implementation scheme based on DFT (DBT-FTN), which can effectively reduce the complexity of base-band signal processing at both ends of the transceiver. The works in [
20,
21] extended the DBT-FTN transmission scheme from single-carrier to multicarrier, forming a multicarrier DBT-FTN (DBT-MC-FTN) scheme. Literature [
22] proposed a joint channel estimation and precoding (JCEP) algorithm for data detection of FTN signaling on frequency selective fading channels.
With the development of AI technology, the problem of data-driven communication signal detection has received increasing attention. On the one hand, various deepearning methods have recently been used to solve the problem of the physicalayer of wireless communication, and valuable results have been obtained [
23]. In addition, the signal training process of LSTM has passed the basic principle of signal processing, and the LSTM expansion model has been formally explained in the framework of approximating the IIR system with the FIR model, and it has been proven to be suitable for sufficient conditions forearning signal sequences [
24]. Yet, on the other hand, as far as our research has uncovered, no or very few scholars use data-driven methods to solve FTN detection algorithms in multipath channels. The existing data-driven related work mainly stays in AWGN channel or special scene channel (similar to AWGN optical communication channel and underwater communication channel) [
25,
26,
27]. Preliminary research results show that for FTN signaling with a higher compression rate, the detection algorithm based on deepearning can obtain better performance than the MAP algorithm [
28]. Compared with the FTN research in the AWGN channel, the research of the FTN signaling receiving algorithm based on the multipath fading channel has more practical value. However, FTN signaling transmission in multipath channels will also bring major challenges to existing receiver algorithms. This is because the inherent ISI of FTN signaling and the non-linear interference caused by the multipath channel are aliased with each other, which makes it difficult for traditional detection algorithms to recover the correct transmitted signal. In addition, most of the existing data-driven FTN detection algorithms use traditional neural networks such as DNN and CNN as the basic structure, and there are relatively few structures that use RNN as a model. On the one hand, RNN networks are widely used in the field of signal processing by virtue of their excellent sequence processing capabilities. On the other hand, our simulation results also show that the RNN network structure is better than the traditional neural network structure for feature extraction of FTN signal interference. This article will propose a new idea for FTN detection with great potential. Compared with traditional methods with perfect mathematical arguments, neural network detection algorithms help to achieve online real-time detection by characterizing training samples offline in advance. With this method, improvements with better robustness andower complexity can be obtained. In general, as the spectrum resources areimited and the computing power is increasing day by day, FTN and data-driven signal processing algorithms are promising development directions and are expected to play an important role in the future communication physicalayer transmission technology.
4. FTN Detection Scheme in Multipath Channels Based on Neural Network
The shaping filter withength L-length is expressed as
,
is expressed as N-length independent equal probability According to the content of the previous section, the following discrete form of the FTN signal vector model can be obtained
where
represents the transmission symbol sequence transmitted by the transmitting end after shaping by a shaping filter with a period of
T,
represents the pulse-shaping matrix. After the FTN signal passes through the multipath channel, the received symbol at the receiving end can be equivalently modeled as a process through the nonlinear channel as follows
where
is the Gaussian white noise signal,
is the colored noise generated after matched filtering,
is the channel response matrix of the multipath channel, and it is also a cyclic matrix.
is expressed as the non-linear aliasing of ISI introduced by FTN and multipath channel, the inter-symbol interference matrices introduced by FTN are represented as
and
, respectively.
In order to recover the originally transmitted signal from the non-linear interference aliased received signal, two different deepearning models, CNN and RNN, will be used to detect FTN signaling.
4.1. Detection via CNN
In the CNN model, we treat FTN detection as a classification problem, select the signal that has not been matched and filtered at the receiving end as the sample set, and theabel set is the symbol sequence of the transmitted signal.The specific structure of using a convolutional neural network as a classification model is shown in
Figure 2. Both convolutionalayers use Relu as a non-linear activation function. Finally, after passing through the fully connectedayer, the output probability distribution is obtained from the activation function SoftMax, where the symbol corresponding to the maximum probability is the estimated signal
.
The rationality of using CNN as the detection algorithm can be explained as follows. In FTN, the influence of the value of the symbol before and after the symbol on the judgment of the current symbol must be considered. From this perspective, the process of the filter sliding on the input data in the CNN model to extractocal features can be regarded as a series of related operations of a small-sized matched filter at different time positions, which measures the magnitude of interference generated by symbols at different moments and uses this as a feature to help subsequent classification judgments.
For high-order modulation, since the information bits are stored in the real and imaginary parts of the signal, the signal at the receiving end is separated according to the real and imaginary parts and then integrated into the corresponding transmission symbol sequence. Specifically, IQ signals can be connected in parallel and the real and imaginary parts can be input into the networkine byine, which is equivalent to processing single-channel two-dimensional images (such as grayscale images). A more reasonable method is to put the real and imaginary signals on different channels, that is, treat the real and imaginary data as different images. This process can be analogous to the three-channel processing of RGB in digital image processing. Furthermore, as the noise interference of FTN signaling in the multipath channel is independent and identically distributed, the correlation between the real part and the imaginary part of the noise is faress clear than the correlation between the adjacent real part or imaginary part signals. Therefore, it can consider using the real part and the imaginary part to be connected to different channels respectively, and the corresponding feature information is extracted, and then the classified results are merged and outputted.
The advantage of the symbol-by-symbol detection of the CNN model is that the model is simple, but the sample signal is not clear enough to express ISI. Therefore, on this basis, we try to use the idea of discrete signal sequence detection to deal with the problem of strong correlation in the time dimension of the FTN—RNN network model.
RNN allows information to persist, that is, the current output depends on all previous inputs. From a computational point of view, as the current state depends on previous calculations, and the network performs the same task for each element of the input sequence. In the next section, the Deep-Bi-LSTM network based on RNN will be introduced in detail, and the effectiveness of FTN detection in multipath channels will be analyzed.
4.2. Proposed Deep-Bi-LSTM Architecture for FTN Signal Detection
In the previous section, FTN signal detection is regarded as a classification problem. Consider using the CNN network to do different processing methods for different received signal forms. In this section, we treat FTN signal detection as a regression problem and explain the proposed Deep-Bi-LSTM network model in detail.
4.2.1. Use RNN-Based LSTM Unit for FTN Detection
Existing research has proven that the RNN-based sequence detection architecture has proven effective in many fields. This is because the RNN network can map the effects of all previous inputs to the current output through feedback connections, which makes the RNN network ‘memorable’ and causal. Aiming at the problem of FTN signal detection, these characteristics of the RNN network are suitable for solving this problem of strong correlation in the time dimension. The proposed network architecture is shown in
Figure 3.
The input of the model is the preprocessed N-length received symbol sequence. After extracting features through two identical fully connected hiddenayers using Bi-LSTM, the fully connectedayer with tanh as the activation function obtains an output in the range (−1, +1). In addition, batch normalization is added after each hiddenayer operation to correct the data distribution to prevent gradient vanishing problems that are difficult toearn effectively. Unlike traditional two-classification problems that mostly use cross-entropy as theoss function, we found in the actual test that using the norm as theoss function can achieve relatively better performance in this problem. The possible reason is that the activation function in the fully connected network chooses to use tanh instead of sigmoid.
The sequence detection model directly outputs the estimated symbol at each moment as
, and the correspondingoss function is
In the process of using traditional RNN, theoretically, it can handle arbitrarilyong sequences. However, in actual application, it often encounters aong-term dependencies problem. Generally, aong short-term memory (LSTM) unit [
29] is used to alleviate this problem.
4.2.2. Reasons for Using Bi-LSTM Structure
In FTN signal detection, it is necessary to consider that the shaping filter is axisymmetric, which means that for the current time k, the interference caused by the symbols at
and
is of the same magnitude. It is obviously not enough to only use the ISI before time k as the interference feature of the current signal. The method to solve this problem is to introduce the Bi-directional LSTM model. As shown in the yellow part of
Figure 3, the bidirectional cyclic neural network model includes a cyclic neural network with a front-to-back processing sequence and a cyclic neural network with a back-to-front processing sequence, which are used to transmit the forward state
and the backward state
.
where
is the model input,
is the information storage unit in the LSTM, and
W and
are the weights and offsets.
Then, the feature information from the pre-order traversal and the post-order traversal is feature merged. Fusion strategies generally include addition, multiplication, averaging, or simple concatenation, etc. The feature fusion method selected here is the default concatenation, where ⊕ represents the integration operation.
4.2.3. Reasons for Using Deep-LSTM Structure
Like Deep Neural Networks (DNN) with a deep architecture, Deep-LSTM has been successfully used in fields such as speech recognition text generation, machine translation, speech recognition, generated image description, and video tagging. In fact, any single LSTM neural network is already a deep architecture, because it can be regarded as a feed-forward neural network unfolded in time, in which eachayer shares the same model parameters. Compared with traditional standard LSTM networks, Deep-LSTM networks provide another advantage. They can make better use of parameters by distributing parameters in multipleayers in space. For example, if the memory size of the standard model is increased by 2 times, there can be 4 layers with roughly the same number of parameters, whicheads to more non-linear operations for the input of each time step. The simulation in
Section 5.2 also proves that introducing a Bi-LSTM network with a suitable depth can improve the performance of the network for FTN signal detection, especially in multipath channel scenarios.
All in all, the interference of FTN signaling mainly comes from the influence of adjacent symbols on the current symbol, which has something in common with the processing architecture of Deep-Bi-LSTM.
4.3. Dataset
The data sets are all FTN signaling in the multipath channels obtained through the same communication system. The data sets can be divided into training data sets and test data sets according to their functions. Theength of each FTN signaling is N, and this signaling represents independent data obtained in software simulation. In the data set, we use the transmitted symbol as theabel, and the corresponding receiving end receives the FTN signaling as the sample. The real part of the signal is regarded as the sample in BPSK modulation, and the real and imaginary parts of the signal will be respectively regarded as the sample in QPSK modulation. In the training and testing phase of the network, the corresponding “label–sample” pairs are used as the data set of the Deep-Bi-LSTM network.
4.4. Complexity Analysis
M represents the modulation order, and represents theength of the FTN signaling affected by the ISI considered by the algorithm. It should be noted here that the ideal theoretical value of should be asong as the sequence, that is, ISI interference comes from the entire sequence. However, existing algorithms are generally set at a fixed value to reduce the difficulty of implementation, which reduces performance to a certain extent.
The existing traditional algorithms includeinear-level complexity algorithms and exponential-level complexity algorithms. Theower complexity is the frequency domain equalization algorithm, whose complexity is , while the complexity of the MAP algorithm is . For data-driven algorithms, the training process is completed offline in advance and does not occupy computing resources, so only the complexity of online operations needs to be considered. Since the CNN model used is determined to be twice the dimensionality of the input data when processing two-dimensional input, the complexity measurementevel of the convolutionalayer operation is the same for the same dimensional input, which is both . For the DMD-JD algorithm, the computational complexity of the online training stage is , but in the real-time detection stage, as there is only simple forward reasoning, the computational complexity will be reduced to . Although the calculation amount of Deep-Bi-LSTM is four times that of LSTM, it still has ainear relationship with the sequenceength.
What needs to be emphasized here is that the complexity of data-driven algorithms does notie in their operations, but transfers the complexity to model adaptability. Specifically, due to the time-varying characteristics of the channel, the data characteristics of different channels, different moving speeds, and even different signal-to-noise ratios are different, and targeted model training needs to be performed according to specific application scenarios, which willead to higher complexity. For the problem of generalization performance, we present targeted work in
Section 5.2.3 to make up for this defect.
6. Conclusions
This paper proposes a DMD-JD FTN detection algorithm to solve the nonlinear aliasing problem in FTN detection of multipath channels. This algorithm can not only achieve better detection performance than traditional algorithms, but also hasower complexity and stronger robustness. The transmission quality can be guaranteed in the scenario of channel switching, making the practical application of FTN possible. The core of the algorithm is that the use of data-driven methods can better fit the aliasing of nonlinear noise withower complexity, and the use of model-driven methods can enhance the robustness and generality of the algorithm on the basis of improving the performance.
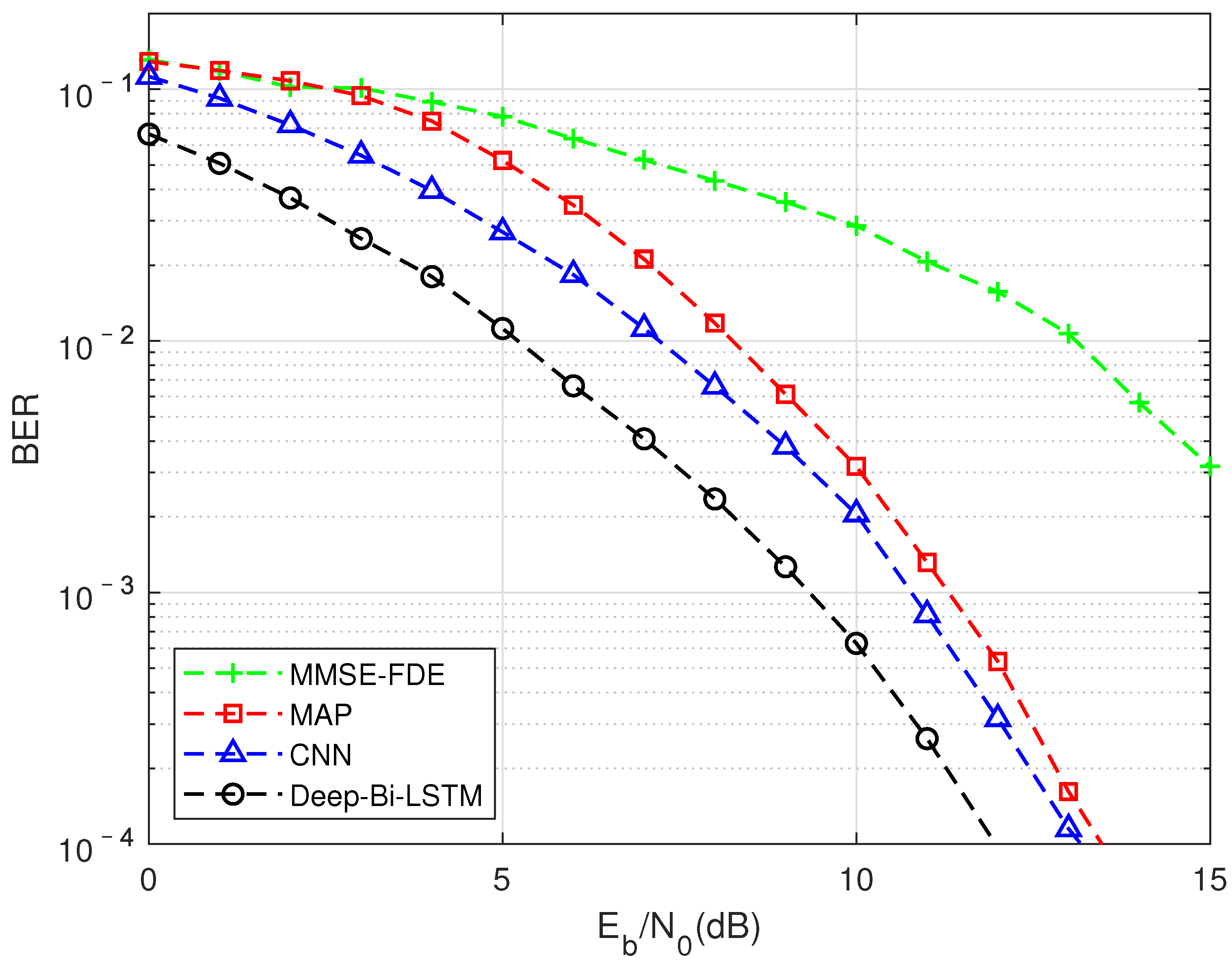
The experimental results show that the DMD-JD algorithm performs well in FTN signal detection, and the performance is improved by nearly 1.6 dB compared with the traditional algorithm. Similar performance has been achieved in QPSK (4QAM) modulation, laying the foundation for future work under high-order modulation. In addition, the relatively optimal network model structure parameters of FTN signal detection are obtained through simulation and comparison. Finally, we verify that the addition of equalization modules makes the DMD-JD algorithm more robust and adaptable in multipath channel transmission scenarios.
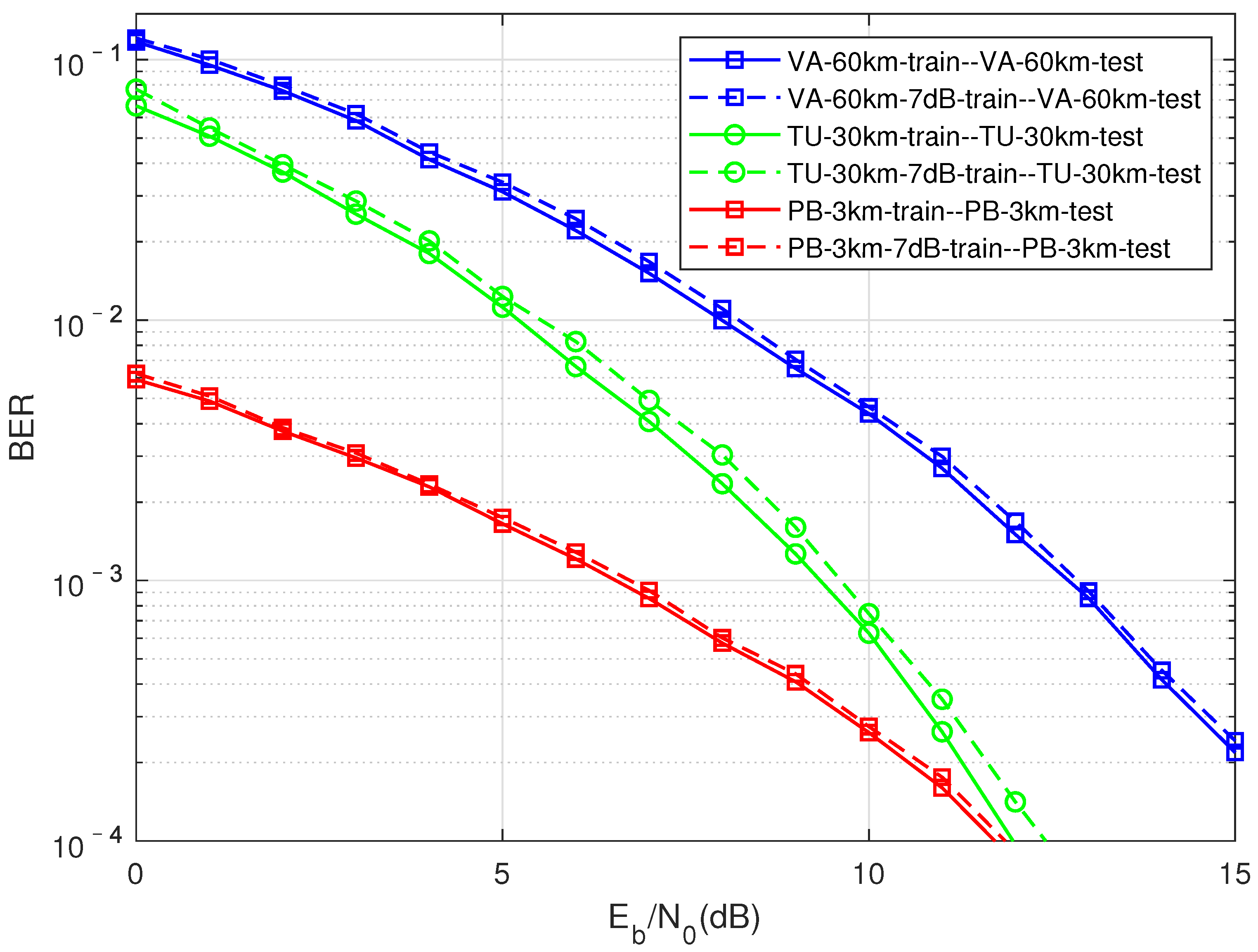
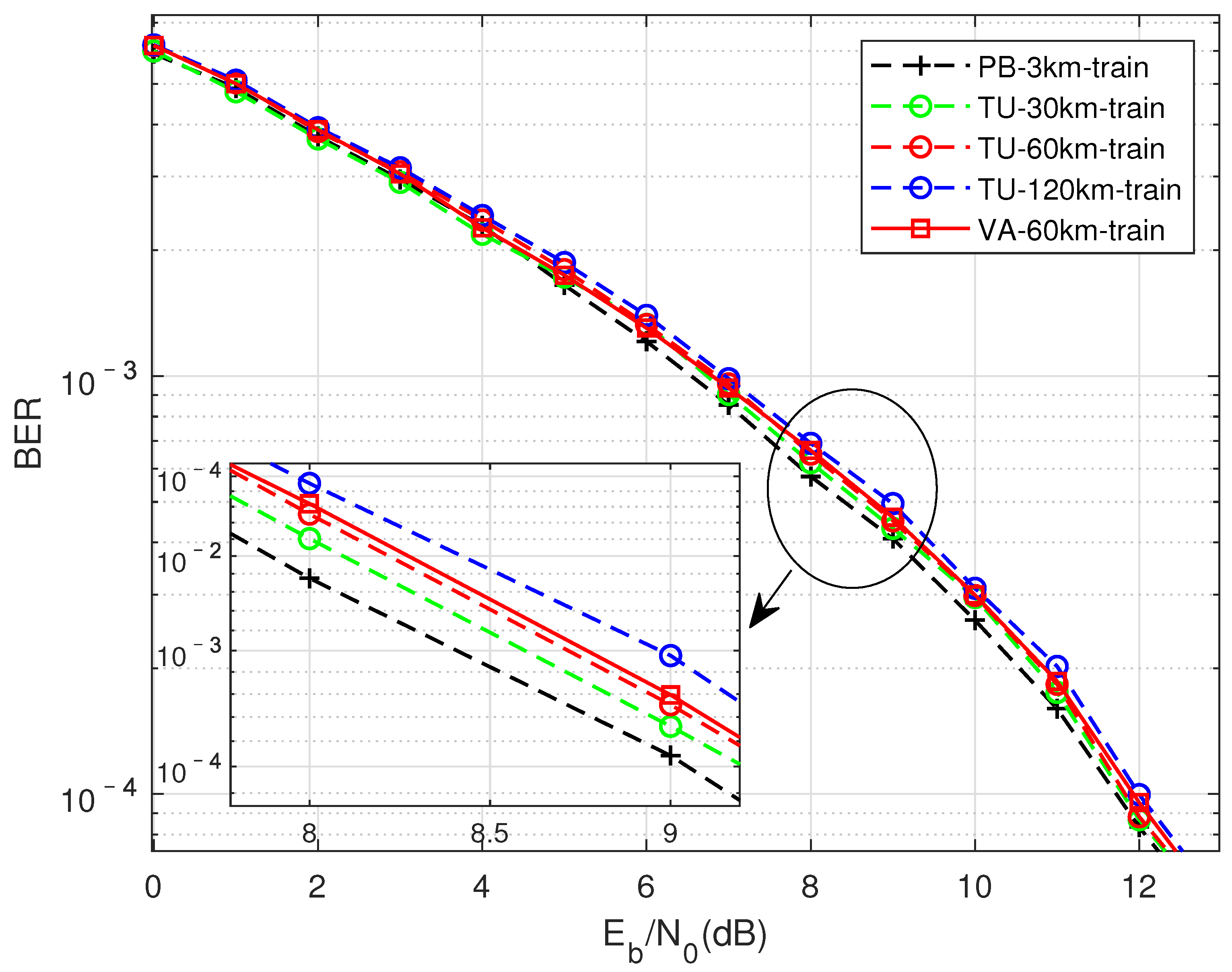
It is worth pointing out that in order to simply verify the performance gain of the FTN detection algorithm, an ideal channel equalization method is used. In future work, we will try to use the traditional channel estimation and equalization methods from the perspectives of signaling processing and data driving to analyze the adaptability of compression factor, FTN transmission under high-order modulation, and time-frequency two-dimensional FTN signal detection.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}