
Systematic Approach for Remote Sensing of Historical Conflict Landscapes with UAV-Based Laserscanning


Abstract
:1. Introduction
1.1. Remote Sensing as a Method to Analyze Conflict Landscapes
1.2. LiDAR Remote Sensing within Historical Conflict Landscapes Research–State of the Art
1.3. Objectives of This Article
2. Materials and Methods
2.1. Equipment
2.2. Investigated Parameters
2.3. Data Acquisition and Study Areas
2.4. Data Processing
3. Results
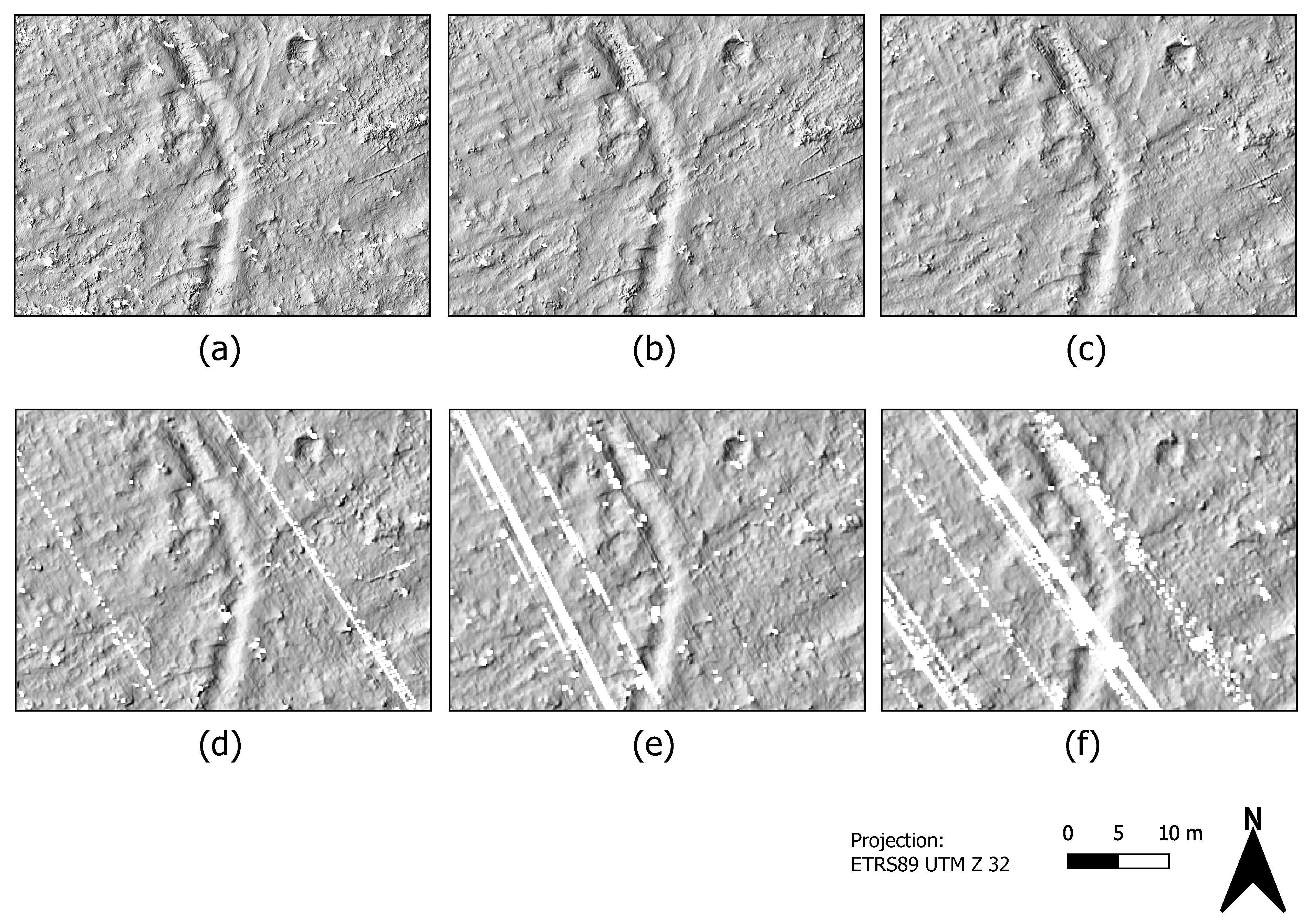
3.1. Influence of Flight Speed
3.2. Influence of Altitude above Ground
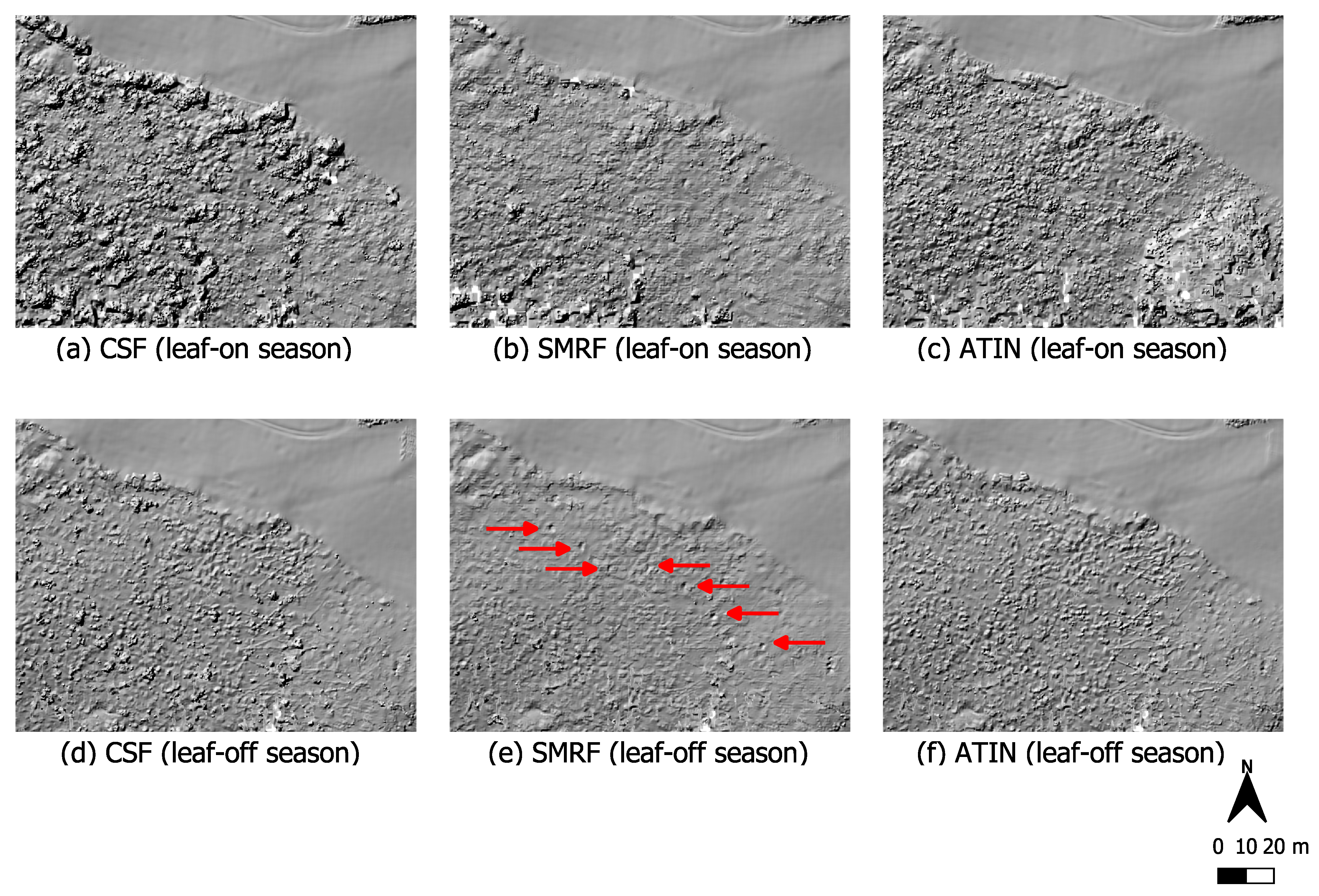
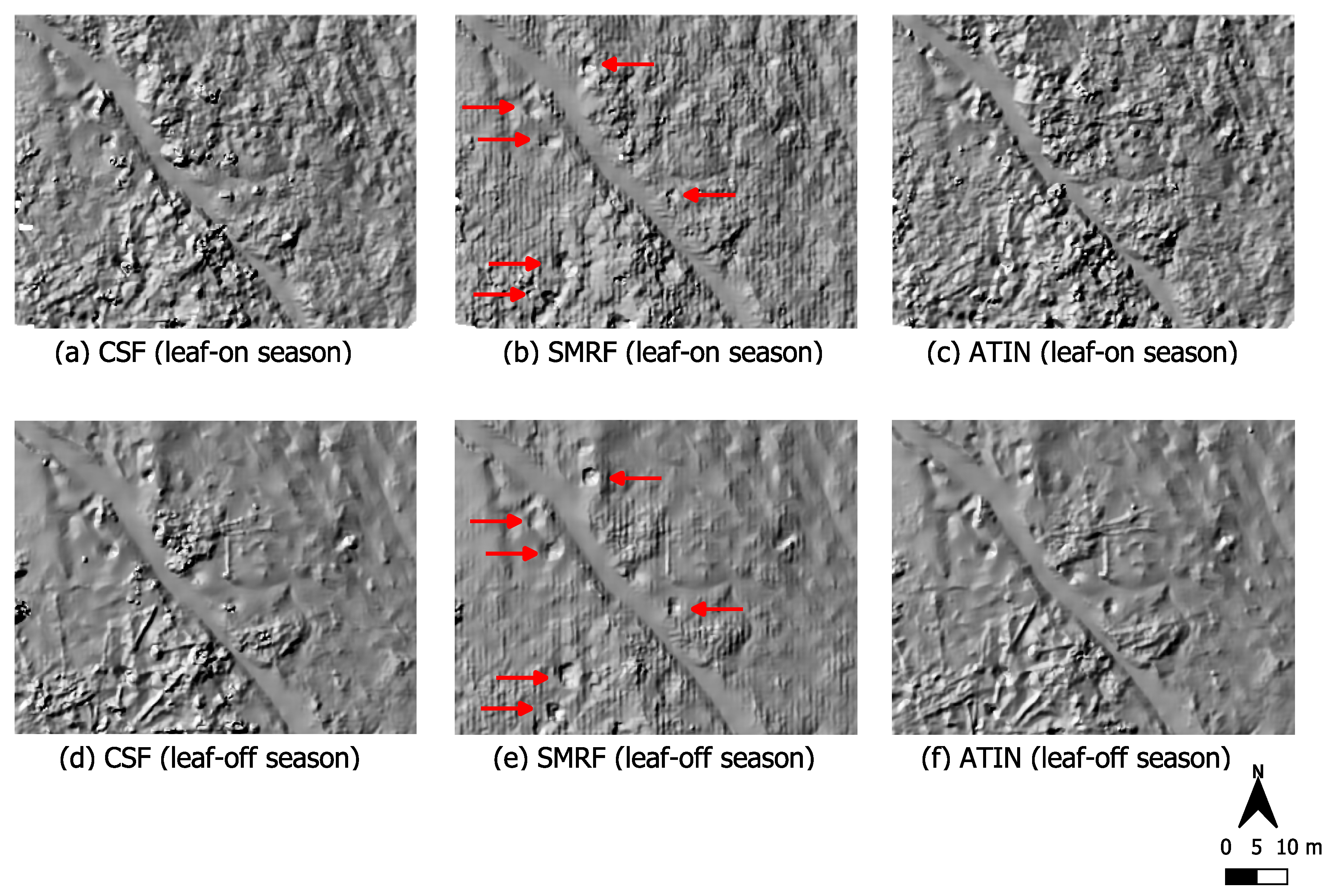
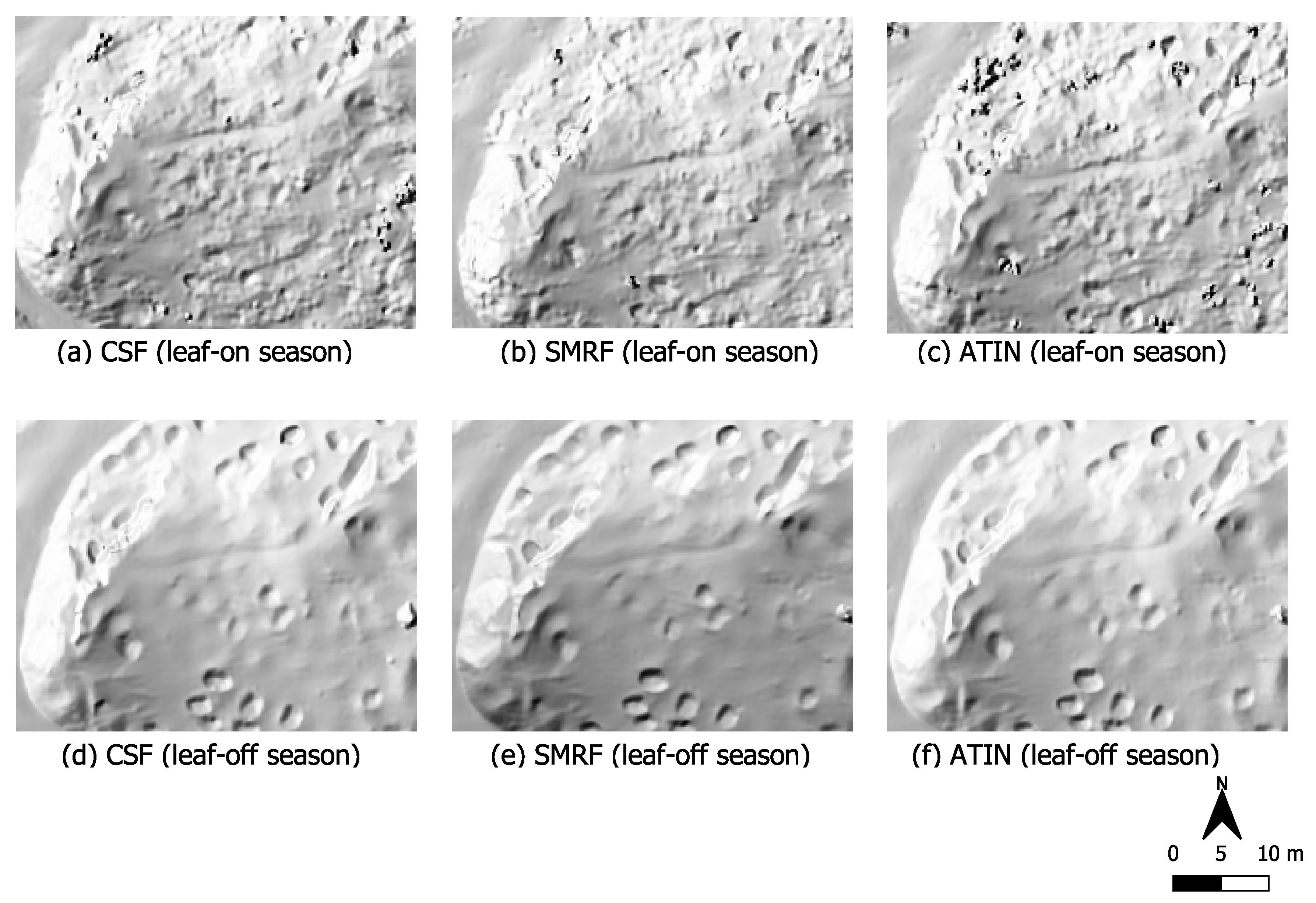
3.3. Influence of Seasonal Acquisition Time and Vegetation Cover
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Saunders, N.; Faulkner, N.; Kosir, U.; Cresnar, M.; Thomas, S. Conflict landscapes of the Soca/Isonzo Front, 1915–2013: Archaeological-Anthropological Evaluation of the Soca Valley, Slovenia. Arheo 2013, 30, 47–66. [Google Scholar]
- Saunders, N.J.; Cornish, P. Conflict Landscapes: Materiality and Meaning in Contested Places; Routledge: New York, NY, USA, 2021. [Google Scholar]
- Stele, A.; Schwickert, M.; Rass, C. The battle of Vossenack Ridge: Exploring interdisciplinary approaches for the detection of US Army field positions on a Second World War battlefield. Antiquity 2021, 95, 180–197. [Google Scholar] [CrossRef]
- Rass, C.; Lohmeier, J. Transformations: Post-battle processes on the Hürtgenwald battlefield. J. Confl. Archaeol. 2011, 6, 179–199. [Google Scholar] [CrossRef]
- Stichelbaut, B.; Cowley, D. Conflict Landscapes and Archaeology from Above; Ashgate Publishing Ltd.: Oxford, UK, 2016. [Google Scholar]
- Verhoeven, G.J. Are we there yet? A review and assessment of archaeological passive airborne optical imaging approaches in the light of landscape archaeology. Geosciences 2017, 7, 86. [Google Scholar] [CrossRef] [Green Version]
- Vilbig, J.M.; Sagan, V.; Bodine, C. Archaeological surveying with airborne LiDAR and UAV photogrammetry: A comparative analysis at Cahokia Mounds. J. Archaeol. Sci. Rep. 2020, 33, 102509. [Google Scholar] [CrossRef]
- Crow, P.; Benham, S.; Devereux, B.J.; Amable, G.S. Woodland vegetation and its implications for archaeological survey using LiDAR. Forestry 2007, 80, 241–252. [Google Scholar] [CrossRef] [Green Version]
- Doneus, M.; Briese, C. Airborne Laser Scanning in forested areas-potential and limitations of an archaeological prospection technique. In Remote Sensing for Archaeological Heritage Management: Proceedings of the 11th EAC Heritage Management Symposium, Reykjavik, Iceland, 25–27 March 2010; Cowley, D.C., Ed.; Europae Archaeologiae Consilium (EAC): Brussels, Belgium, 2011; pp. 59–76. [Google Scholar]
- Kenzler, H.; Lambers, K. Challenges and Perspectives of Woodland Archaeology Across Europe. In CAA2014: 21st Century Archaeology, Concepts, Methods and Tools, Proceedings of the 42nd Annual Conference on Computer Applications and Quantitative Methods in Archaeology; Giligny, F., Djindjian, F., Costa, L., Moscati, P., Robert, S., Eds.; Archaeopress Publishing Ltd.: Oxford, UK, 2014; pp. 73–80. [Google Scholar]
- Luo, L.; Wang, X.; Guo, H.; Lasaponara, R.; Zong, X.; Masini, N.; Wang, G.; Shi, P.; Khatteli, H.; Chen, F.; et al. Airborne and spaceborne remote sensing for archaeological and cultural heritage applications: A review of the century (1907–2017). Remote Sens. Environ. 2019, 232, 111280. [Google Scholar] [CrossRef]
- Balz, T.; Caspari, G.; Fu, B.; Liao, M. Discernibility of Burial Mounds in High-Resolution X-Band SAR Images for Archaeological Prospections in the Altai Mountains. Remote Sens. 2016, 8, 817. [Google Scholar] [CrossRef] [Green Version]
- Ronchi, D.; Limongiello, M.; Barba, S. Correlation among earthwork and cropmark anomalies within archaeological landscape investigation by using LiDAR and multispectral technologies from UAV. Drones 2020, 4, 72. [Google Scholar] [CrossRef]
- Fernandez-Diaz, J.C.; Carter, W.E.; Shrestha, R.L.; Glennie, C.L. Now you see it... Now you don’t: Understanding airborne mapping LiDAR collection and data product generation for archaeological research in Mesoamerica. Remote Sens. 2014, 6, 9951–10001. [Google Scholar] [CrossRef] [Green Version]
- Abdallah, H.; Bailly, J.S.; Baghdadi, N.N.; Saint-Geours, N.; Fabre, F. Potential of space-borne LiDAR sensors for global bathymetry in coastal and inland waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 202–216. [Google Scholar] [CrossRef] [Green Version]
- Simard, M.; Pinto, N.; Fisher, J.B.; Baccini, A. Mapping forest canopy height globally with spaceborne lidar. J. Geophys. Res. Biogeosci. 2011, 116, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Spracklen, B.; Spracklen, D.V. Determination of Structural Characteristics of Old-Growth Forest in Ukraine Using Spaceborne LiDAR. Remote Sens. 2021, 13, 1233. [Google Scholar] [CrossRef]
- Sánchez, J.G. Archaeological LiDAR in Italy: Enhancing research with publicly accessible data. Antiquity 2018, 92, e4. [Google Scholar] [CrossRef] [Green Version]
- Gallagher, J.M.; Josephs, R.L. Using LiDAR to detect cultural resources in a forested environment: An example from Isle Royale National Park, Michigan, USA. Archaeol. Prospect. 2008, 15, 187–206. [Google Scholar] [CrossRef]
- Due Trier, Ø.; Pilø, L.H. Automatic Detection of Pit Structures in Airborne Laser Scanning Data. Archaeol. Prospect. 2012, 19, 103–121. [Google Scholar] [CrossRef]
- Risbøl, O.; Bollandsås, O.M.; Nesbakken, A.; Ørka, H.O.; Næsset, E.; Gobakken, T. Interpreting cultural remains in airborne laser scanning generated digital terrain models: Effects of size and shape on detection success rates. J. Archaeol. Sci. 2013, 40, 4688–4700. [Google Scholar] [CrossRef]
- Weishampel, J.F.; Hightower, J.N.; Chase, A.F.; Chase, D.Z.; Patrick, R.A. Detection and morphologic analysis of potential below-canopy cave openings in the karst landscape around the Maya polity of Caracol using airborne LiDAR. J. Cave Karst Stud. 2011, 73, 187–196. [Google Scholar] [CrossRef]
- Moyes, H.; Montgomery, S. Locating Cave Entrances Using Lidar-Derived Local Relief Modeling. Geosciences 2019, 9, 98. [Google Scholar] [CrossRef] [Green Version]
- Geyhle, W.; Stichelbaut, B.; Saey, T.; Note, N.; van den Berghe, H.; van Eetvelde, V.; van Meirvenne, M.; Bourgeois, J. Scratching the surface of war. Airborne laser scans of the Great War conflict landscape in Flanders (Belgium). Appl. Geogr. 2018, 90, 55–68. [Google Scholar] [CrossRef]
- De Matos-Machado, R.; Toumazet, J.P.; Bergès, J.C.; Amat, J.P.; Arnaud-Fassetta, G.; Bétard, F.; Bilodeau, C.; Hupy, J.P.; Jacquemot, S. War landform mapping and classification on the Verdun battlefield (France) using airborne LiDAR and multivariate analysis. Earth Surf. Process. Landf. 2019, 44, 1430–1448. [Google Scholar] [CrossRef]
- Van der Schriek, M.; Beex, W. The application of LiDAR-based DEMs on WWII conflict sites in the Netherlands. J. Confl. Archaeol. 2017, 12, 94–114. [Google Scholar] [CrossRef] [Green Version]
- Van der Schriek, M. The interpretation of WWII conflict landscapes. Some case studies from the Netherlands. Landsc. Res. 2020, 45, 758–776. [Google Scholar] [CrossRef]
- Seitsonen, O.; Ikäheimo, J. Detecting Archaeological Features with Airborne Laser Scanning in the Alpine Tundra of Sápmi, Northern Finland. Remote Sens. 2021, 13, 1599. [Google Scholar] [CrossRef]
- Bollandsås, O.M.; Risbøl, O.; Ene, L.T.; Nesbakken, A.; Gobakken, T.; Næsset, E. Using airborne small-footprint laser scanner data for detection of cultural remains in forests: An experimental study of the effects of pulse density and DTM smoothing. J. Archaeol. Sci. 2012, 39, 2733–2743. [Google Scholar] [CrossRef]
- Rees-Hughes, L.; Pringle, J.K.; Russill, N.; Wisniewski, K.D.; Doyle, P. Multi-disciplinary investigations at PoW Camp 198, Bridgend, S. Wales: Site of a mass escape in March 1945. J. Confl. Archaeol. 2016, 11, 166–191. [Google Scholar] [CrossRef] [Green Version]
- Campana, S. Drones in Archaeology. State-of-the-art and Future Perspectives. Archaeol. Prospect. 2017, 24, 275–296. [Google Scholar] [CrossRef]
- Khan, S.; Aragão, L.; Iriarte, J. A UAV–lidar system to map Amazonian rainforest and its ancient landscape transformations. Int. J. Remote Sens. 2017, 38, 2313–2330. [Google Scholar] [CrossRef]
- Opitz, R.; Herrmann, J. Recent Trends and Long-standing Problems in Archaeological Remote Sensing. J. Comput. Appl. Archaeol. 2018, 1, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Risbøl, O.; Gustavsen, L. LiDAR from drones employed for mapping archaeology—Potential, benefits and challenges. Archaeol. Prospect. 2018, 25, 329–338. [Google Scholar] [CrossRef]
- Zhou, W.; Chen, F.; Guo, H.; Hu, M.; Li, Q.; Tang, P.; Zheng, W.; Liu, J.; Luo, R.; Yan, K.; et al. UAV Laser scanning technology: A potential cost-effective tool for micro-topography detection over wooded areas for archaeological prospection. Int. J. Digit. Earth 2020, 13, 1279–1301. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; García, M.D.N.; De Larriva, J.E.M.; García-Ferrer, A. An analysis of the influence of flight parameters in the generation of unmanned aerial vehicle (UAV) orthomosaicks to survey archaeological areas. Sensors 2016, 16, 1838. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Serifoglu, C.; Gungor, O.; Yilmaz, V. Performance evaluation of different ground filtering algorithms for uav-based point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 245–251. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Gao, B.; Devereux, B. State-of-the-art: DTM generation using airborne LIDAR data. Sensors 2017, 17, 150. [Google Scholar] [CrossRef] [Green Version]
- Štular, B.; Lozić, E. Comparison of filters for archaeology-specific ground extraction from airborne LiDAR point clouds. Remote Sens. 2020, 12, 3025. [Google Scholar] [CrossRef]
- Štular, B.; Lozić, E.; Eichert, S. Airborne LiDAR-derived digital elevation model for archaeology. Remote Sens. 2021, 13, 1855. [Google Scholar] [CrossRef]
- Datasheet RIEGL miniVUX-1UAV. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RIEGL_miniVUX-1UAV_Datasheet_2020-10-06.pdf (accessed on 14 April 2021).
- Datasheet RIEGL miniVUX-SYS. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RIEGL_miniVUX-SYS_Datasheet_2020-10-05.pdf (accessed on 14 April 2021).
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M.; Wang, T.; Hussin, Y.A. Generating pit-free canopy height models from airborne lidar. Photogramm. Eng. Remote Sens. 2014, 80, 863–872. [Google Scholar] [CrossRef]
- Abate, D.; Sturdy Colls, C.; Moyssi, N.; Karsili, D.; Faka, M.; Anilir, A.; Manolis, S. Optimizing search strategies in mass grave location through the combination of digital technologies. Forensic Sci. Int. Synerg. 2019, 1, 95–107. [Google Scholar] [CrossRef] [PubMed]
- Blau, S.; Sterenberg, J.; Weeden, P.; Urzedo, F.; Wright, R.; Watson, C. Exploring non-invasive approaches to assist in the detection of clandestine human burials: Developing a way forward. Forensic Sci. Res. 2018, 3, 304–326. [Google Scholar] [CrossRef] [Green Version]
- Faulenbach, B. Die Emslandlager in der deutschen und der europäischen Geschichte. In Hölle im Moor. Die Emslandlager 1933–1945; Faulenbach, B., Kaltofen, A., Eds.; Wallstein: Göttingen, Germany, 2017; pp. 17–24. [Google Scholar]
- Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft. Publications Office of the European Union. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:02019R0947-20210805 (accessed on 28 November 2021).
- Miller, E. A Dark and Bloody Ground: The Hürtgen Forest and the Roer River Dams; Texas A&M University Press: College Station, TX, USA, 1995. [Google Scholar]
- MacDonald, C.B. The European Theater of Operations: The Siegfried Line Campaign; Office of the Chief of Military History, Department of the Army: Washington, DC, USA, 1963. [Google Scholar]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef]
- Ten Harkel, J.; Bartholomeus, H.; Kooistra, L. Biomass and Crop Height Estimation of Different Crops Using UAV-Based Lidar. Remote Sens. 2020, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Serifoglu Yilmaz, C.; Yilmaz, V.; Güngör, O. Investigating the performances of commercial and non-commercial software for ground filtering of UAV-based point clouds. Int. J. Remote Sens. 2018, 39, 5016–5042. [Google Scholar] [CrossRef]
- Klápště, P.; Fogl, M.; Barták, V.; Gdulová, K.; Urban, R.; Moudrý, V. Sensitivity analysis of parameters and contrasting performance of ground filtering algorithms with UAV photogrammetry-based and LiDAR point clouds. Int. J. Digit. Earth 2020, 13, 1672–1694. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering airborne laser scanning data with morphological methods. Photogramm. Eng. Remote Sens. 2007, 73, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Mongus, D.; Žalik, B. Computationally Efficient Method for the Generation of a Digital Terrain Model From Airborne LiDAR Data Using Connected Operators. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 340–351. [Google Scholar] [CrossRef]
- Axelsson, P. DEM generation form laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 4, 110–118. [Google Scholar]
- Lindsay, J.B.; Francioni, A.; Cockburn, J.M.H. LiDAR DEM smoothing and the preservation of drainage features. Remote Sens. 2019, 11, 1926. [Google Scholar] [CrossRef] [Green Version]
- Yokoyama, R.; Shirasawa, M.; Pike, R.J. Visualizing topography by openness: A new application of image processing to digital elevation models. Photogramm. Eng. Remote Sens. 2002, 68, 257–265. [Google Scholar]
- Doneus, M. Openness as visualization technique for interpretative mapping of airborne lidar derived digital terrain models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef] [Green Version]
- Devereux, B.J.; Amable, G.S.; Crow, P. Visualisation of LiDAR terrain models for archaeological feature detection. Antiquity 2008, 82, 470–479. [Google Scholar] [CrossRef]
- Hesse, R. LiDAR-derived Local Relief Models—A new tool for archaeological prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef] [Green Version]
- Bennett, R.; Welham, K.; Hill, R.A.; Ford, A. A Comparison of Visualization Techniques for Models Created from Airborne Laser Scanned Data. Archaeol. Prospect. 2012, 19, 41–48. [Google Scholar] [CrossRef]
- Kokalj, Ž.; Somrak, M. Why not a single image? Combining visualizations to facilitate fieldwork and on-screen mapping. Remote Sens. 2019, 11, 747. [Google Scholar] [CrossRef] [Green Version]
- Jin, J.; De Sloover, L.; Verbeurgt, J.; Stal, C.; Deruyter, G.; Montreuil, A.L.; De Maeyer, P.; De Wulf, A. Measuring surface moisture on a sandy beach based on corrected intensity data of a mobile terrestrial LiDAR. Remote Sens. 2020, 12, 209. [Google Scholar] [CrossRef] [Green Version]
- James, K.; Nichol, C.J.; Wade, T.; Cowley, D.; Gibson-Poole, S.; Gray, A.; Gillespie, J. Thermal and Multispectral Remote Sensing for the Detection and Analysis of Archaeologically Induced Crop Stress at a UK Site. Drones 2020, 4, 61. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Investigated Parameters | Type of Anomalies | Topography and Vegetation | Study Area |
|---|---|---|---|
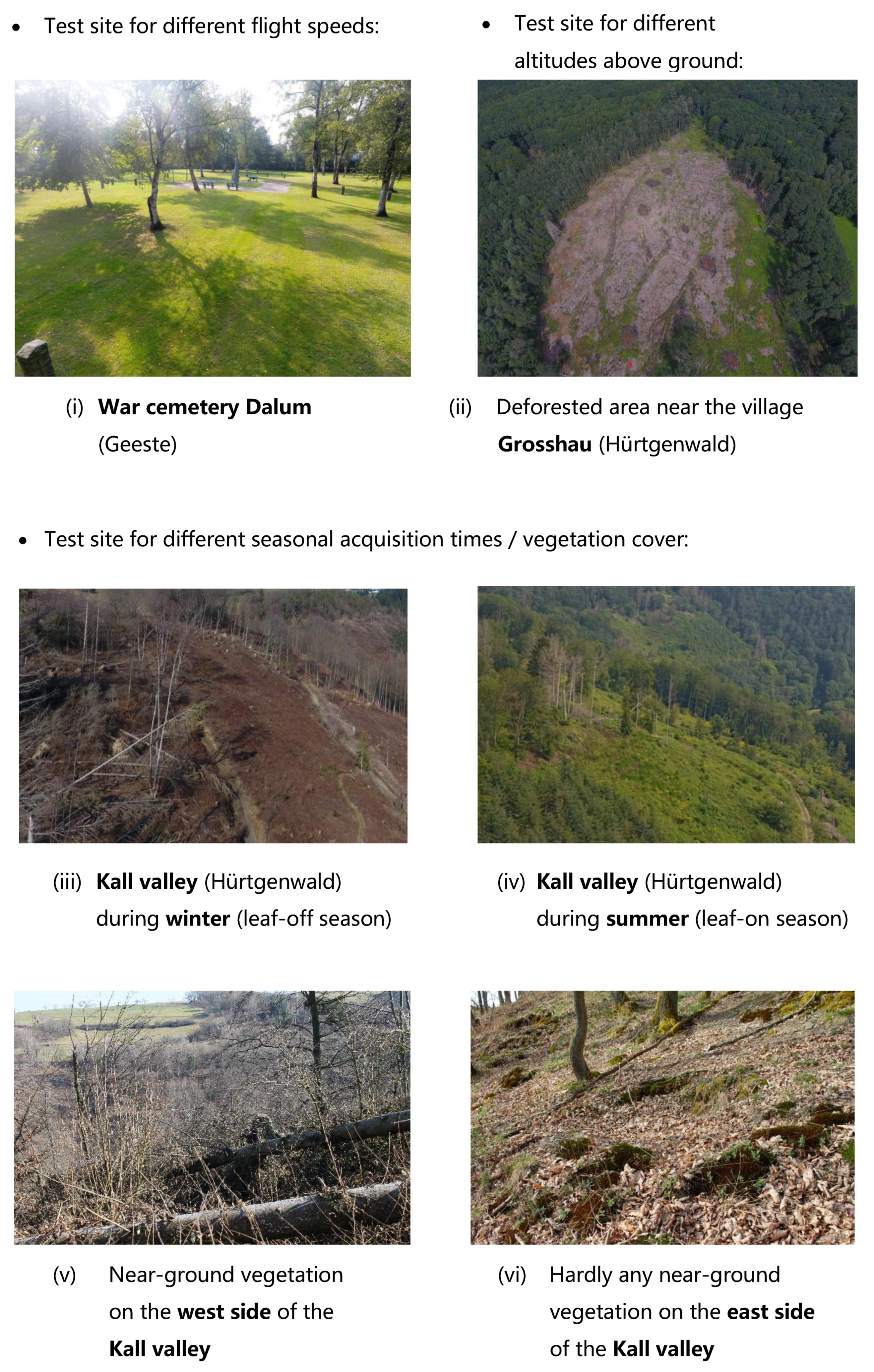
| Flight speed | Type B | flat, open terrain | War cemetery Dalum (municipality Geeste) |
| Altitude above ground | Type A | open terrain | Trench near Großhau (municipality Hürtgenwald) |
| Acquisition time (seasonal), vegetation cover | Type A | different density of high and low seasonal vegetation | Kall valley (municipality Hürtgenwald) |
| Flight Speed | 1 m/s | 2 m/s | 6 m/s | |
|---|---|---|---|---|
| unfiltered | Mean laser shot density (last returns) | 295 pulses/m2 | 152 pulses/m2 | 49 pulses/m2 |
| Mean horizontal laser shot spacing (last returns) | 6 cm | 8 cm | 14 cm | |
| Mean point density | 412 points/m2 | 215 points/m2 | 69 points/m2 | |
| Mean horizontal point spacing | 5 cm | 7 cm | 12 cm | |
| Mean ground point density | 206 points/m2 | 104 points/m2 | 33 points/m2 | |
| Mean horizontal ground point spacing | 7 cm | 10 cm | 17 cm |
| Altitude above Ground | 10 m | 30 m | 50 m | 75 m | 100 m | 120 m | |
|---|---|---|---|---|---|---|---|
| unfiltered | Mean laser shot density (last returns) [pulses/m2] | 727 | 282 | 164 | 81 | 65 | 54 |
| Mean horizontal laser shot spacing (last returns) | 4 cm | 6 cm | 8 cm | 11 cm | 12 cm | 14 cm | |
| Mean point density [points/m2] | 727 | 287 | 175 | 86 | 69 | 57 | |
| Mean horizontal point spacing | 4 cm | 6 cm | 8 cm | 11 cm | 12 cm | 13 cm | |
| Mean ground point density [points/m2] | 672 | 253 | 138 | 71 | 54 | 44 | |
| Mean horizontal ground point spacing | 4 cm | 6 cm | 8 cm | 12 cm | 14 cm | 15 cm | |
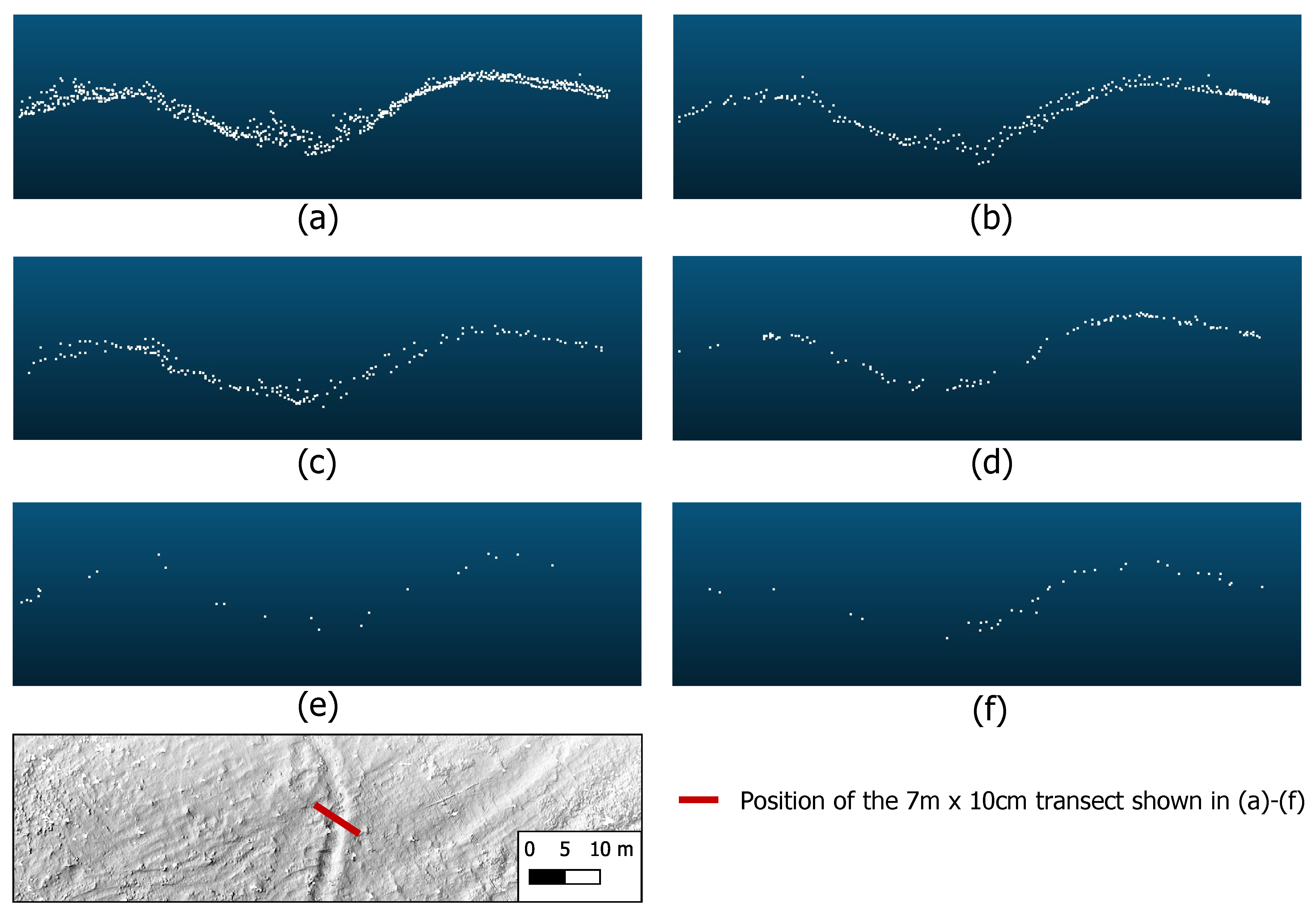
| Maximum horizontal distance between two adjacent points along the transect shown in Figure 4 | <10 cm | 11 cm | 13 cm | 28 cm | 52 cm | 76 cm | |
| Laser beam footprint diameter on the ground in nadir [cm × cm] | 1.6 × 0.5 | 4.8 × 1.5 | 8 × 2.5 | 12 × 3.75 | 16 × 5 | 19 × 6 |
| Area Covered with | Results of Ground Filter | (Summer Data) | (Winter Data) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Low veg. | dec. Forest | CSF | SMRF | ATIN | CSF | SMRF | ATIN | ||
| Figure 6 | √ | √ | Mean point density [pts/m2] | 70 | 63 | 84 | 122 | 117 | 144 |
| Mean point spacing | 12 cm | 13 cm | 11 cm | 9 cm | 9 cm | 8 cm | |||
| Figure 7 | √ | Mean point density [pts/m2] | 165 | 137 | 203 | 171 | 150 | 189 | |
| Mean point spacing | 8 cm | 9 cm | 7 cm | 8 cm | 8 cm | 7 cm | |||
| Figure 8 | √ | Mean point density [pts/m2] | 55 | 47 | 61 | 122 | 128 | 121 | |
| Mean point spacing | 14 cm | 15 cm | 13 cm | 9 cm | 9 cm | 9 cm | |||
| Influencing Factor | Objective/Research Area | Recommendations | |
|---|---|---|---|
| Flight speed | Type B anomalies in partially vegetated area | Lower speeds in the range of 1–2 m/s | |
| Type B anomalies in treeless open terrain | Higher speeds like 6 m/s are justifiable | ||
| Altitude above ground | Type A anomalies. Capture the ground with | Higher flying altitudes in the range | |
| as little noise as possible caused by low objects | of 50–75 m | ||
| Vegetation cover | Near-Ground Vegetation | Deciduous Forest | |
| √ | √ | Data acquisition during winter (leaf-off), | |
| use morphological filter, e.g., SMRF | |||
| √ | Data acq. during summer or winter, | ||
| use morphological filter, e.g., SMRF | |||
| √ | Data acquisition during winter (leaf-off), | ||
| filter method plays a subordinate role | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Storch, M.; Jarmer, T.; Adam, M.; de Lange, N. Systematic Approach for Remote Sensing of Historical Conflict Landscapes with UAV-Based Laserscanning. Sensors 2022, 22, 217. https://doi.org/10.3390/s22010217
Storch M, Jarmer T, Adam M, de Lange N. Systematic Approach for Remote Sensing of Historical Conflict Landscapes with UAV-Based Laserscanning. Sensors. 2022; 22(1):217. https://doi.org/10.3390/s22010217
Chicago/Turabian StyleStorch, Marcel, Thomas Jarmer, Mirjam Adam, and Norbert de Lange. 2022. "Systematic Approach for Remote Sensing of Historical Conflict Landscapes with UAV-Based Laserscanning" Sensors 22, no. 1: 217. https://doi.org/10.3390/s22010217