
Application of MEMS Sensors for Evaluation of the Dynamics for Cargo Securing on Road Vehicles



Abstract
:1. Introduction
2. Literature Review
- Indication of significant potential accelerations for cargo damage [61].
3. Materials and Methods
3.1. MEMS Sensors Used to Measure Dynamic Actions
3.1.1. XL Meter
- s0—braking distance in meters, which was calculated by the duplicated integration of the acceleration data in the interval of the brake time;
- v0—initial braking velocity in km/h, which was calculated by the simple numerical integration of the acceleration data in the interval of the brake time;
- Tbr—total braking time in seconds, which was calculated by subtracting the brake start time from the brake end time;
3.1.2. BOSCH BMI260 IMU + UBlox UBX-M8030-CT
3.1.3. BOSCH BHA250 + BOSCH BMG250 + UBlox UBX-M8030-CT
3.1.4. BOSCH BMI160 + UBlox UBX-M8030-CT
3.2. A Theoretical Course of Braking and Forces to Design the Securing of Cargo
- Driver’s response time tr—the time of the driver’s reaction is defined as a time period which elapses from the moment when the driver accepts an impulse to start braking until the moment when they touch the brake control;
- Brake response time t0—the time from the moment when the driver starts acting on the brake control until the moment when the pressure in the braking system starts increasing, i.e., until the moment when the vehicle starts braking;
- Braking effect start-up time tn—the time from the moment when the driver starts acting on the braking control until the moment when the pressure achieves 75% of the nominal pressure of the braking system in the most distant brake cylinder of the braking system; thus, the braking effect start-up time also includes the brake response time;
- Effective braking time tub—the time from the end of the braking effect start-up time until the vehicle stops;
- Total braking time tcb—the time from the moment when the driver touches the brake control until the moment when the car stops; thus, the total braking time is a sum of the braking effect start-up time and the effective braking time;
- Time to stop tz—the time from the acceptance of an impulse to start braking by the driver until the moment when the car stops; thus, it is a sum of the response time, the braking effect start-up time, and the effective braking time [74].
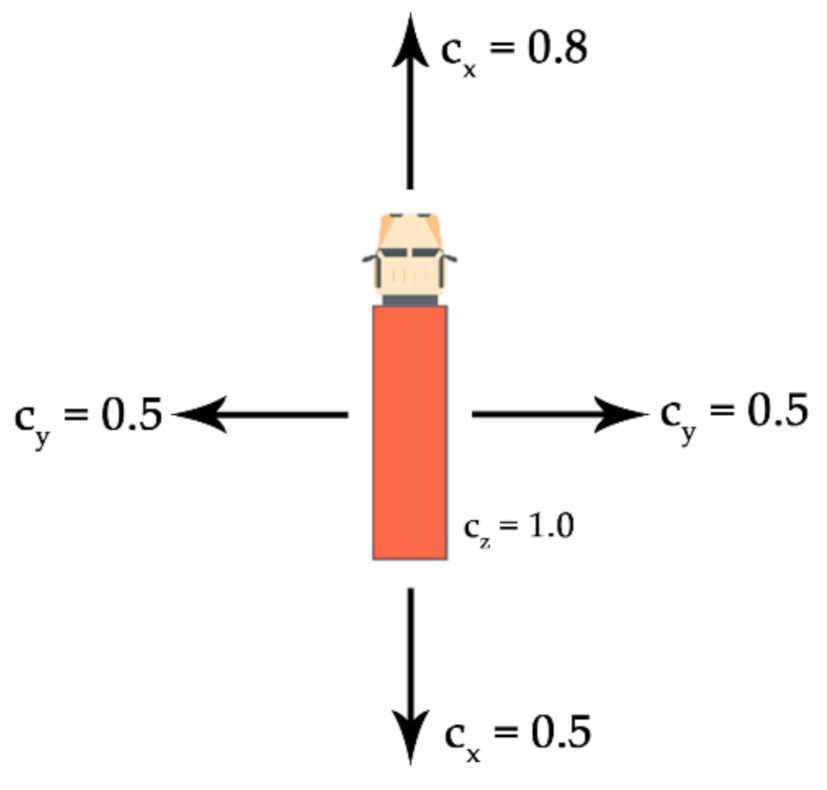
- cx—longitudinal acceleration coefficient;
- cy—transverse acceleration coefficient;
- cz—coefficient of acceleration vertically down.
3.3. Evaluation of the Measured Data
3.4. The Methodology of Performed Measurements
3.4.1. A Comparison of Results Measured with Sensors during Braking
3.4.2. The Usage of Sensors during Braking with a Loaded Vehicle Combination
- Series 1—offset paper, total cargo mass 19,636 kg, (Sensors A–F), vehicle comb. 1;
- Series 2—offset paper, total cargo mass 19,636 kg, (Sensors A–D), vehicle comb. 2;
- Series 3—steel bars, total cargo mass 22,766 kg, (Sensors A–D), vehicle comb. 3;
- Series 4—steel bars, total cargo mass 23,772 kg, (Sensors A–D), vehicle comb. 3;
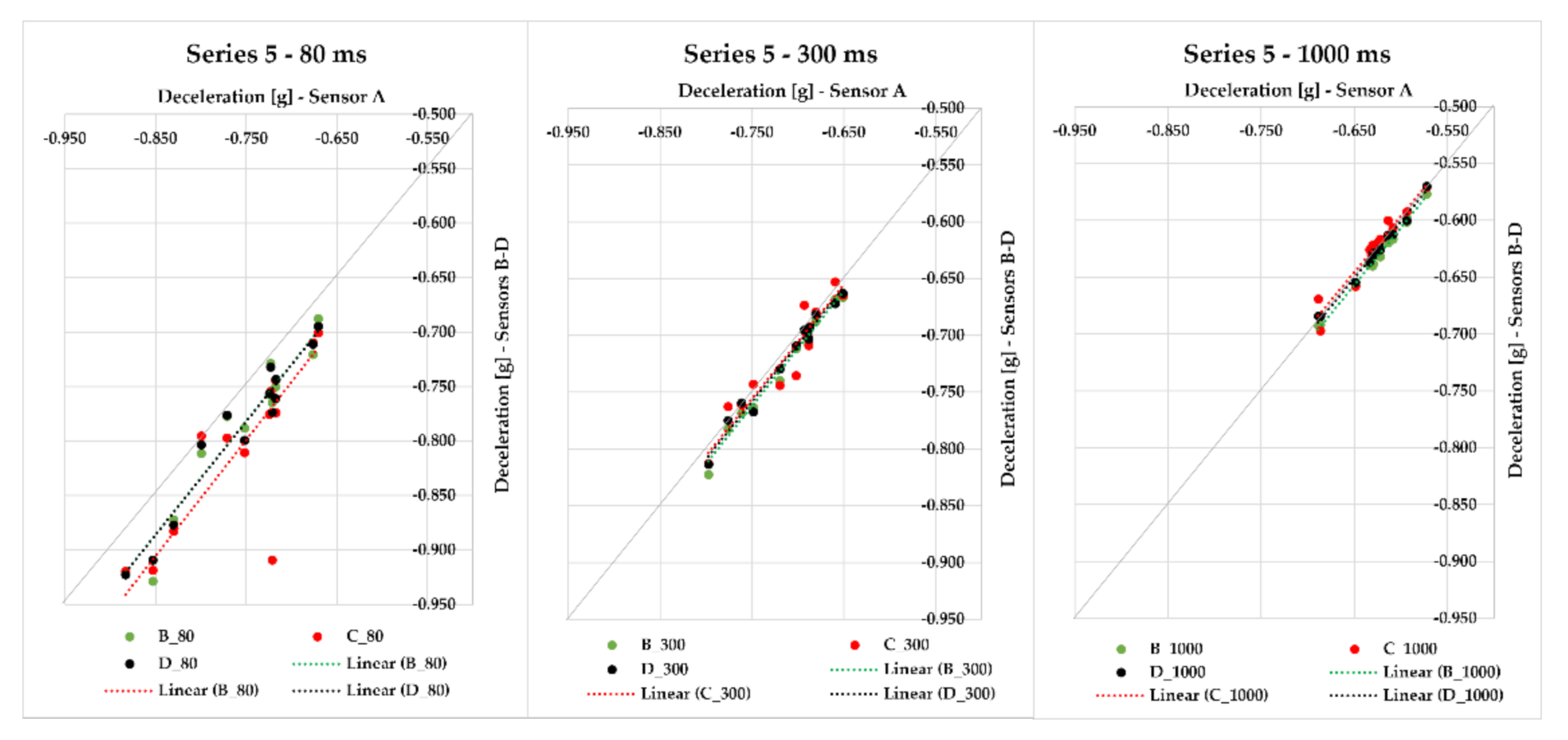
- Series 5—steel bars, total cargo mass 15,169 kg, (Sensors A–D), vehicle comb. 3;
- Series 6—steel bars, total cargo mass 24,062 kg, (Sensors A–D), vehicle comb. 3;
- Series 7—steel bars, total cargo mass 9841 kg, (Sensors A–D), vehicle comb. 3);
- Series 8—steel bars, total cargo mass 15,142 kg, (Sensors A–D), vehicle comb. 3;
3.4.3. The Usage of Sensors during Monitoring a Semi-trailer Vehicle Combination Transport
4. Results
4.1. A Comparison of Results Measured with Sensors during Braking
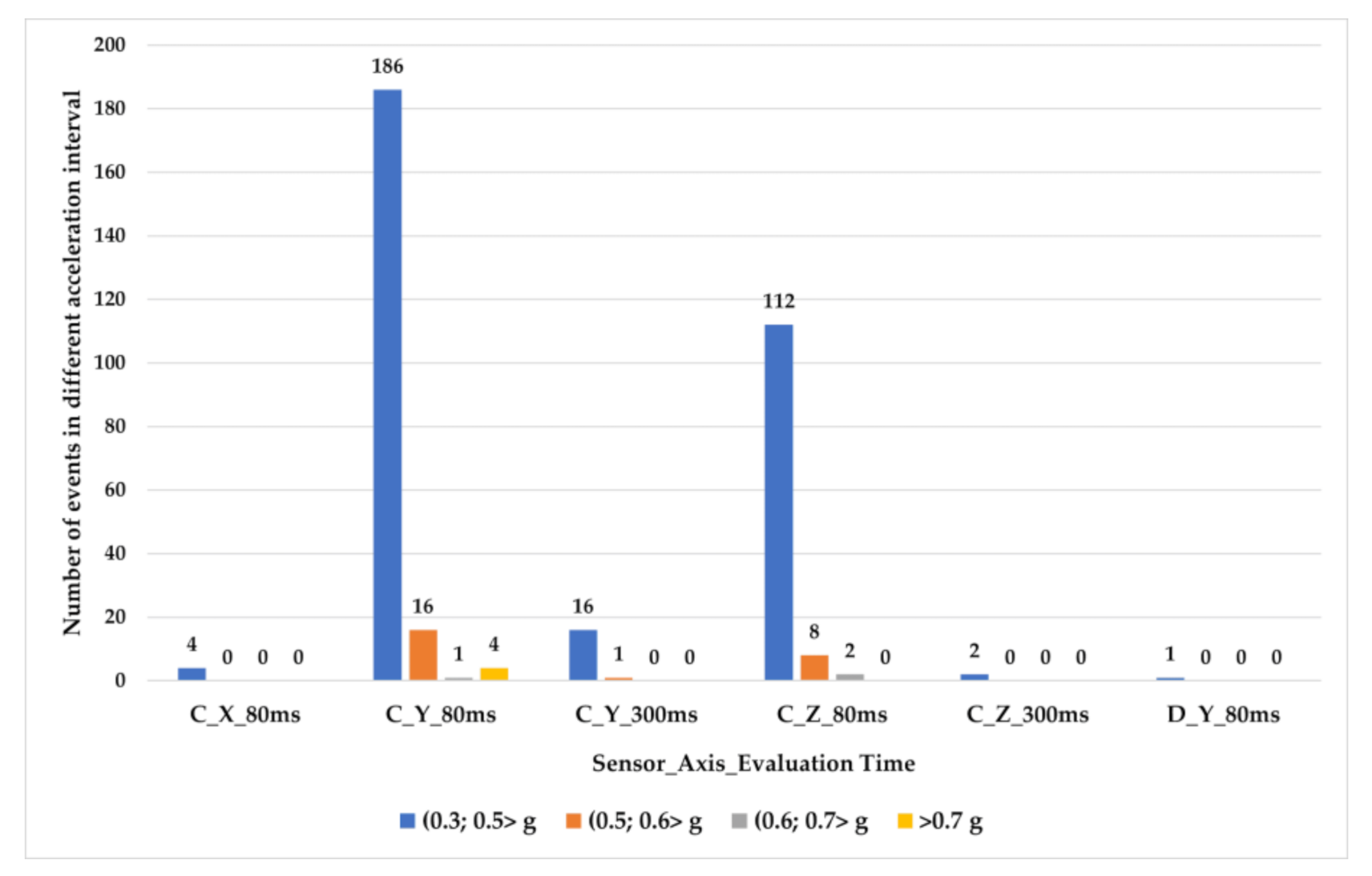
4.2. The Usage of Sensors during Braking with a Loaded Vehicle Combination
4.3. The Usage of Sensors during Monitoring a Semi-Trailer Combination Transport
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mirtabar, Z.; Golroo, A.; Mahmoudzadeh, A.; Barazandeh, F. Development of a crowdsourcing-based system for computing the international roughness index. Int. J. Pavement Eng. 2020, 1, 1–10. [Google Scholar] [CrossRef]
- Chen, K.; Lu, M.; Fan, X.; Wei, M.; Wu, J. Road Condition Monitoring Using On-Board Three-Axis Accelerometer and GPS Sensor. In Proceedings of the 6th International ICST Conference on Communications and Networking in China (CHINACOM), Harbin, China, 17–19 August 2011; pp. 1032–1037. [Google Scholar] [CrossRef]
- Du, Y.; Liu, C.; Wu, D.; Li, S. Application of Vehicle Mounted Accelerometers to Measure Pavement Roughness. Int. J. Distrib. Sens. Networks 2016, 12, 8413146. [Google Scholar] [CrossRef] [Green Version]
- Anitha, R.; Deepak, M.; Snehesh, T. Road quality and condition detection using GPS and a Raspberry pi. Int. J. Innov. Res. Creat. Technol. 2015, 1, 527–529. [Google Scholar]
- González, A.; Olazagoitia, J.L.; Vinolas, J. A Low-Cost Data Acquisition System for Automobile Dynamics Applications. Sensors 2018, 18, 366. [Google Scholar] [CrossRef] [Green Version]
- Wickramarathne, T.; Garg, V.; Bauer, P. On the Use of 3-D Accelerometers for Road Quality Assessment. In Proceedings of the IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Elizondo, J.C.; Martinez, J.R.; Barron, J.H.; Diaz, A. Using a Microelectromechanical System to Identifying Roadway Surface Disruptions. IEEE Lat. Am. Trans. 2018, 16, 1664–1669. [Google Scholar] [CrossRef]
- Larsdotter, R.; Jaller, D. Automatic Calibration and Virtual Alignment of MEMS-sensor Placed in Vehicle for Use in Road Condition Determination System. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2014. [Google Scholar]
- Vladimir, B.; Iurii, N.; Artem, N.; Stanislav, S.; Egor, G. Development of a hardware-software complex for automatic registration and analysis of vehicle motion parameters. In Proceedings of the IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Saint Petersburg and Moscow, Russia, 28–31 January 2019; pp. 2136–2138. [Google Scholar] [CrossRef]
- Cesario, N.; Taglialatela, F.; Lavorgna, M. MEMS Accelerometer as Inclinometer for Electric Parking Brake Systems. In Proceedings of the 8th International Conference on Engines for Automobiles, Capri, Italy, 16–21 September 2007. [Google Scholar] [CrossRef]
- Yang, H.; Liu, X.; Sun, R. Application of MEMS accelerometer with digital output in vehicle navigation. Chin. J. Sci. Instrum. 2005, 26, 357–358. [Google Scholar]
- Struţu, M.I.; Popescu, D. Accelerometer based road defects identification system. UPB Sci. Bull. Ser. C Electr. Eng. Comput. Sci. 2014, 76, 65–78. [Google Scholar]
- Miletiev, R.; Kapanakov, P.; Iontchev, E.; Yordanov, R. High sampling rate IMU with dual band GNSS receiver. In Proceedings of the 43rd International Spring Seminar on Electronics Technology (ISSE), Demanovska Valley, Slovakia, 13–17 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Chiculita, C.; Frangu, L. A low-cost car vibration acquisition system. In Proceedings of the 2015 IEEE 21st International Symposium for Design and Technology in Electronic Packaging (SIITME), Brasov, Romania, 22–25 October 2015; pp. 281–285. [Google Scholar] [CrossRef]
- Rivas, J.; Wunderlich, R.; Heinen, S.J. Road Vibrations as a Source to Detect the Presence and Speed of Vehicles. IEEE Sens. J. 2016, 17, 377–385. [Google Scholar] [CrossRef]
- Strache, S.; Wunderlich, R.; Heinen, S. Self-powered intelligent sensor node concept for monitoring of road and traffic conditions. Sens. Transducers 2012, 14, 93–110. [Google Scholar]
- Rivas, J.; Wunderlich, R.; Heinen, S.J. A MEMS Acceleration Sensor for Traffic Condition Detection, PRIME 2012. In Proceedings of the 8th Conference on Ph.D. Research in Microelectronics & Electronics, Aachen, Germany, 12–15 June 2012; pp. 1–4. [Google Scholar]
- Ng, E.-H.; Tan, S.-L.; Gúzman, J.G. Road traffic monitoring using a wireless vehicle sensor network. In Proceedings of the 2008 International Symposium on Intelligent Signal Processing and Communications Systems, Bangkok, Thailand, 8–11 December 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Sellapandi, S.P.; Vijayprasath, S.; Parthasarathy, P.; Kohila, C.; Francis, D.; Lavanya Devi, N. An improved mechanical design for exposed motorist monitoring system using mems. Int. J. Mech. Eng. Technol. 2018, 9, 2245–2253. [Google Scholar]
- Rupok, M.S.A.; Patnaik, H.K.; Ding, X.; Ganesan, S. MEMS accelerometer based low-cost collision impact analyzer. In Proceedings of the 2016 IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 393–396. [Google Scholar] [CrossRef]
- Parmar, P.; Sapkal, A.M. Real time detection and reporting of vehicle collision. In Proceedings of the 2017 International Conference on Trends in Electronics and Informatics (ICEI), Tirunelveli, India, 11–12 May 2017; pp. 1029–1034. [Google Scholar] [CrossRef]
- Lonkar, B.B.; Sayankar, M.R. Design and implementation of automatic vehicle tracker system for accidental emergency. In Proceedings of the 6th International Conference on Communication and Network Security ICCNS 2016, Nanyang Executive Centre, Singapore, Singapore, 12–14 November 2016; pp. 46–50. [Google Scholar]
- Mantoro, T.; Suryasa, I.N.; Moedjiono, S.; Nugroho, M.R. Automatic Early Warning for Vehicles Accidents Based on User Location. Adv. Sci. Lett. 2016, 22, 3065–3070. [Google Scholar] [CrossRef]
- Han, S.; Wang, J. Land Vehicle Navigation with the Integration of GPS and Reduced INS: Performance Improvement with Velocity Aiding. J. Navig. 2009, 63, 153–166. [Google Scholar] [CrossRef] [Green Version]
- Palella, N.; Colombo, L.; Pisoni, F.; Avellone, G.; Philippe, J. Sensor fusion for land vehicle slope estimation. In Proceedings of the 2016 DGON Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 20–21 September 2016; pp. 1–20. [Google Scholar] [CrossRef]
- Niu, X.; Zhang, Q.; Li, Y.; Cheng, Y.; Shi, C. Using inertial sensors of iPhone 4 for car navigation. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 555–561. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Syed, Z.; Goodall, C. Nonlinear filtering for tightly coupled RISS/GPS integration. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 1014–1021. [Google Scholar] [CrossRef]
- Qifen, L.; Lun, A.; Junpeng, X.; Hsu, L.; Kamijo, S.; Gu, Y. Tightly coupled RTK/MIMU using single frequency BDS/GPS/QZSS receiver for automatic driving vehicle. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 185–189. [Google Scholar] [CrossRef]
- Atia, M.M.; Hilal, A.R.; Stellings, C.; Hartwell, E.; Toonstra, J.; Miners, W.B.; Basir, O.A. A Low-Cost Lane-Determination System Using GNSS/IMU Fusion and HMM-Based Multistage Map Matching. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3027–3037. [Google Scholar] [CrossRef]
- Atia, M.; Donnelly, C.; Noureldin, A.; Korenberg, M. A novel systems integration approach for multi-sensor integrated navigation systems. In Proceedings of the 2014 IEEE International Systems Conference Proceedings, Ottawa, ON, Canada, 31 March–3 April 2014; pp. 554–558. [Google Scholar] [CrossRef]
- Meiling, W.; Guoqiang, F.; Huachao, Y.; Yafeng, L.; Yi, Y.; Xuan, X. A loosely coupled MEMS-SINS/GNSS integrated system for land vehicle navigation in urban areas. In Proceedings of the 2017 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Vienna, Austria, 27–28 June 2017; pp. 103–108. [Google Scholar] [CrossRef]
- Allan, D. Statistics of atomic frequency standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Xu, Q.; Li, B.; Song, X. A Highly Reliable and Cost-Efficient Multi-Sensor System for Land Vehicle Positioning. Sensors 2016, 16, 755. [Google Scholar] [CrossRef] [Green Version]
- Sugiura, R.; Nakai, Y.; Kubo, Y.; Sugimoto, S.; Mizukami, S.; Imamura, T.; Kumagai, H. A Low Cost INS/GNSS/Vehicle Speed Integration Method for Land Vehicles. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 1163–1169. [Google Scholar] [CrossRef]
- Onishi, T.; Sugiura, R.; Kubo, Y.; Sugimoto, S. INS/GNSS/Vehicle Speed Integration for Land Vehicles with Utilizing Zero-Velocity Information. In Proceedings of the 48th ISCIE International Symposium on Stochastic Systems Theory and Its Applications, Fukuoka, Japan, 4–5 November 2017; pp. 63–69. [Google Scholar] [CrossRef] [Green Version]
- Bharadwaj, S.; Murali, S.; Balakrishnan, J.; Deshpande, A.; Shekar, Y.; Dutta, G. MEMS Sensor Assisted Terrestrial Vehicular Navigation on Portable Devices. In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 1084–1091. [Google Scholar]
- Iqbal, U.; Georgy, J.; Abdelfatah, W.F.; Tamazin, M.; Korenberg, M.; Noureldin, A. Non-Linear Modeling of Pseudorange Errors for Centralized Non-Linear Multi-Sensor System Integration. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 494–502. [Google Scholar]
- Iqbal, U.; Georgy, J.; Abdelfatah, W.F.; Korenberg, M.; Noureldin, A. Enhancing kalman filtering–based tightly coupled navigation solution through remedial estimates for pseudorange measurements using parallel cascade identification. Instrum. Sci. Technol. 2012, 40, 530–566. [Google Scholar] [CrossRef]
- Cossaboom, M.; Georgy, J.; Karamat, T.B.; Noureldin, A. Augmented Kalman Filter and Map Matching for 3D RISS/GPS Integration for Land Vehicles. Int. J. Navig. Obs. 2012, 2012, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Low-Cost Three-Dimensional Navigation Solution for RISS/GPS Integration Using Mixture Particle Filter. IEEE Trans. Veh. Technol. 2010, 59, 599–615. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A. Tightly Coupled Low Cost 3D RISS/GPS Integration Using a Mixture Particle Filter for Vehicular Navigation. Sensors 2011, 11, 4244–4276. [Google Scholar] [CrossRef]
- Georgy, J.; Karamat, T.; Iqbal, U.; Noureldin, A. Enhanced MEMS-IMU/odometer/GPS integration using mixture particle filter. GPS Solut. 2010, 15, 239–252. [Google Scholar] [CrossRef]
- Shen, Z.; Korenberg, M.J.; Noureldin, A. A Real-time Approach to Nonlinear Modeling of Inertial Errors with Application to Three Dimension Vehicle Navigation. In Proceedings of the 2011 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 23–26 January 2011; pp. 811–818. [Google Scholar]
- De Agostino, M.; Lingua, A.; Marenchino, D.; Nex, F.; Piras, M. A New Photogrammetric Combined Approach to Improve the GNSS/INS Solution. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 460–470. [Google Scholar]
- De Agostino, M.; Lingua, A.; Nex, F.; Piras, M. GIMPhI: A novel vision-based navigation approach for low cost MMS. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 1238–1244. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Eberts, M.D.; El-Shafie, A. Performance Enhancement of MEMS-Based INS/GPS Integration for Low-Cost Navigation Applications. IEEE Trans. Veh. Technol. 2008, 58, 1077–1096. [Google Scholar] [CrossRef]
- El-Shafie, A.; Noureldin, A.; Bayoumi, M. An Augmented Wavelet—Neuro-Fuzzy Module for Enhancing MEMS based Navigation Systems. In Proceedings of the 2007 IEEE International Conference on Signal Processing and Communications, Dubai, United Arab Emirates, 24–27 November 2007; pp. 1339–1342. [Google Scholar] [CrossRef]
- Ma, C.; Zheng, Y.; Tan, Y.; Yubin, L.; Wang, S. Design of two-axis attitude control system based on MEMS sensors. Nongye Gongcheng Xuebao. 2015, 31, 28–37. [Google Scholar] [CrossRef]
- Guo, L.S.; Zhang, Q. A low-cost navigation system for autonomous off-road vehicles. In Proceedings of the International Conference on Automation Technology for Off-road Equipment ATOE 2004, Kyoto, Japan, 7–8 October 2004; pp. 107–119. [Google Scholar]
- Guo, L. Development of a Low-Cost Navigation System for Autonomous Off-Road Vehicles. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2003. [Google Scholar]
- Guo, L.-S.; Zhang, Q. A low-cost integrated positioning system for autonomous off-highway vehicles. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 2008, 222, 1997–2009. [Google Scholar] [CrossRef]
- Kashani, R. Active Boom Noise Damping of a Large Sport Utility Vehicle. SAE Tech. Paper Ser. 2003. [Google Scholar] [CrossRef]
- Sawicki, M.; Różanowski, K.; Sondej, T. MEMS sensors signal preprocessing for vehicle monitoring systems. In Proceedings of the 2013 Signal Processing: Algorithms, Architectures, Arrangements, Poznan, Poland, 26–28 September 2013; pp. 349–353. [Google Scholar]
- Asokanthan, S.F.; Tian, Y.; Wang, T. Active Roll Control of Heavy-duty Road-vehicles Employing MEMS Angular rate Sensors. In Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007, Las Vegas, NV, USA, 4–7 September 2007; pp. 1053–1061. [Google Scholar] [CrossRef]
- Tian, Y. Active Roll Control of Heavy-Duty Road-Vehicles Employing MEMS Angular Rate Sensors. Master’s Thesis, University of Western Ontario, London, ON, Canada, 2005. [Google Scholar]
- Tomcik, P.; Juránek, M.; Kulhanek, J. Modal analysis of car frame by MEMs accelerometer digital network. In Proceedings of the 13th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 28–31 May 2012; pp. 731–734. [Google Scholar] [CrossRef]
- Erdogan, G.; Hong, S.; Borrelli, F.; Hedrick, K. Tire Sensors for the Measurement of Slip Angle and Friction Coefficient and Their Use in Stability Control Systems. SAE Int. J. Passeng. Cars Mech. Syst. 2011, 4, 44–58. [Google Scholar] [CrossRef]
- Braghin, F.; Brusarosco, M.; Cheli, F.; Cigada, A.; Manzoni, S.; Mancosu, F. Measurement of contact forces and patch features by means of accelerometers fixed inside the tire to improve future car active control. Veh. Syst. Dyn. 2006, 44, 3–13. [Google Scholar] [CrossRef]
- Brusarosco, M.; Cigada, A.; Manzoni, S. Experimental investigation of tyre dynamics by means of MEMS accelerometers fixed on the liner. Veh. Syst. Dyn. 2008, 46, 1013–1028. [Google Scholar] [CrossRef]
- Hu, J.; Rakheja, S.; Zhang, Y. Real-time estimation of tire–road friction coefficient based on lateral vehicle dynamics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2444–2457. [Google Scholar] [CrossRef]
- Ondrus, J.; Vrabel, J.; Kolla, E. The influence of the vehicle weight on the selected vehicle braking characteristics. In Proceedings of the Transport Means 2018. Part I: Proceedings of the International Scientific Conference, Trakai, Lithuania, 3–5 October 2018; pp. 1822–296384. [Google Scholar]
- Ondrus, J.; Kolla, E. Practical Use of the Braking Attributes Measurements Results. In Proceedings of the 18th International Scientific Conference on LOGI, Ceske Budejovice, Czech Republic, 19 October 2017; Sponsor(s): Inst Technol & Business Ceske, Dept Transport & Logist; Univ Pardubice, Jan Perner Transport Fac; Coll Logist Prerov. 2017; Volume 134, p. 00044. [Google Scholar] [CrossRef]
- Skrucany, T.; Vrabel, J.; Kazimir, P. The influence of the cargo weight and its position on the braking characteristics of light commercial vehicles. Open Eng. 2020, 10, 154–165. [Google Scholar] [CrossRef]
- Skrúcaný, T.; Vrábel, J.; Kendra, M.; Kažimír, P. Impact of Cargo Distribution on the Vehicle Flatback on Braking Distance in Road Freight Transport. MATEC Web Conf. 2017, 134, 00054. [Google Scholar] [CrossRef]
- Bai, Y.; Wang, X.; Jin, X.; Su, T.; Kong, J.; Zhang, B. Adaptive filtering for MEMS gyroscope with dynamic noise model. ISA Trans. 2020, 101, 430–441. [Google Scholar] [CrossRef] [PubMed]
- Di Barba, P.; Fattorusso, L.; Versaci, M. Electrostatic field in terms of geometric curvature in membrane MEMS devices. Commun. Appl. Ind. Math. 2017, 8, 165–184. [Google Scholar] [CrossRef] [Green Version]
- Inventure XL Meter Pro Gama User’s Manual. Available online: https://manualzz.com/doc/6694857/xl-meter™-pro (accessed on 20 January 2021).
- Regulation No 13 of the Economic Commission for Europe of the United Nations (UN/ECE)—Uniform Provisions Concerning the Approval of Vehicles of Categories M, N and O with Regard to Braking [2016/194]. Available online: https://eur-lex.europa.eu/legal-content/GA/TXT/?uri=CELEX:42016X0218 (accessed on 20 January 2021).
- BOSCH BMI260 Data Sheet, Document Number BST-BMI260-FL000-00. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/product_flyer/bst-bmi260-fl000.pdf (accessed on 20 January 2021).
- Ublox UBX-M8030 Data Sheet, Document Number UBX-15029937-R07. Available online: https://www.u-blox.com/sites/default/files/products/documents/UBX-M8030_ProductSummary_%28UBX-15029937%29.pdf (accessed on 20 January 2021).
- BOSCH BHA250 Data Sheet, Document Number BST-BHA250(B)-DS000-02. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bha250b-ds000.pdf (accessed on 20 January 2021).
- BOSCH BMG250 Data Sheet, Document Number BST-BMG250-DS000-03. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bmg250-ds000.pdf (accessed on 20 January 2021).
- BOSCH BMI160 Data Sheet, Document Number BST-BMI160-DS0001-08. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bmi160-ds000.pdf (accessed on 20 January 2021).
- Rievaj, V.; Sulgan, M.; Hudak, A.; Jagelcak, J. The Car and Its Dynamics; EDIS—University of Zilina: Žilina, Slovakia, 2013; ISBN 978-80-554-0627-5. [Google Scholar]
- EN 12195-1:2010 Load Restraining on Road Vehicles. Safety. Part 1: Calculation of Securing Forces. Available online: https://standards.iteh.ai/catalog/standards/cen/72067d57-b90c-4ca5-8bd0-f876e25e6a6e/en-12195-1-2010 (accessed on 20 January 2021).
- IMO/ILO/UNECE Code of Practice for Packing of Cargo Transport Units (CTU Code) 2014. Available online: https://unece.org/fileadmin/DAM/trans/doc/2014/wp24/CTU_Code_January_2014.pdf (accessed on 20 January 2021).
- Directive 2014/47/EU of the European Parliament and of the Council of 3 April 2014 on the Technical Roadside Inspection of the Roadworthiness of Commercial Vehicles Circulating in the Union and Repealing Directive 2000/30/EC Text with EEA Relevance. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32014L0047&from=EN (accessed on 19 March 2021).
- Agreement Concerning the International Carriage of Dangerous Goods by Road, UN/ECE, Geneve. 2021. Available online: https://unece.org/transportdangerous-goods/adr-2021-files (accessed on 19 March 2021).
- EN 12642:2016 Securing of Road on Road Vehicles—Body Structure of Commercial Vehicles—Minimum Requirements. Available online: https://standards.iteh.ai/catalog/standards/cen/cfb5d8a8-67c0-46fc-8b51-be9163596d6c/en-12642-2016 (accessed on 20 January 2021).
- EN 17321:2020 Intermodal Loading Units and Commercial Vehicles—Transport Stability of Packages—Minimum Requirements and Tests. Available online: https://standards.iteh.ai/catalog/standards/sist/545c1b9f-c7d0-4196-aec8-eb1cbe8f0f81/ksist-fpren-17321-2020 (accessed on 20 January 2021).
- Vlkovský, M.; Neubauer, J.; Malíšek, J.; Michálek, J. Improvement of Road Safety through Appropriate Cargo Securing Using Outliers. Sustainability 2021, 13, 2688. [Google Scholar] [CrossRef]
- Vlkovský, M.; Ivanuša, T.; Neumann, V.; Foltin, P.; Vlachová, H. Optimizating cargo security during transport using dataloggers. J. Transp. Secur. 2017, 10, 63–71. [Google Scholar] [CrossRef]
- Vlkovsky, M.; Smerek, M.; Michalek, J. Cargo Securing during Transport Depending on the Type of the Road. IOP Conf. Ser. Mater. Sci. Eng. 2007, 245, 042001. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer | Gyroscope | |||
|---|---|---|---|---|
| Range | Sensitivity | Range | Sensitivity | |
| Sensor A | ±2 g | ±1% | - | - |
| Sensor B | ±8 g | 4096 LSB/g | ±500 dps | ±65.6 LSB/dps |
| Sensors C and D | ±8 g | 1024 LSB/g | ±500 dps | ±65.6 LSB/dps |
| Sensors E and F | ±8 g | 4096 LSB/g | ±500 dps | ±65.6 LSB/dps |
| Acceleration Coefficients | ||||
|---|---|---|---|---|
| Securing in | Longitudinally (cx) | Transversely (cy) | Minimum Vertically Down (cz) | |
| Forward | Rearward | |||
| Longitudinal direction | 0.8 | 0.5 | - | 1.0 |
| Transverse direction | - | - | 0.5 | 1.0 |
| Deviation of Maximum Average Acceleration in 80 ms [g] | ||||||||||
| A–B | A–C | A–D | A–E | B–C | B–D | B–E | C–D | C–E | D–E | |
| MIN | 0.020 | 0.038• | 0.031• | 0.018 | 0.002 | 0.005 | 0.002 | 0.004 | 0.003 | 0.012 |
| AVG | 0.053• | 0.063• | 0.059• | 0.046• | 0.018 | 0.019 | 0.007 | 0.022 | 0.021 | 0.024 |
| MED | 0.049• | 0.052• | 0.064• | 0.039• | 0.011 | 0.017 | 0.006 | 0.021 | 0.015 | 0.018 |
| MAX | 0.087• | 0.101• | 0.076• | 0.083• | 0.060• | 0.040• | 0.016 | 0.049• | 0.069• | 0.042• |
| y | 1.0513x | 1.0614x | 1.0574x | 1.0449x | 1.0094x | 1.0055x | 0.994x | 0.9959x | 0.9843x | 0.9881x |
| R2 | 0.9996 | 0.9996 | 0.9998 | 0.9996 | 0.9996 | 0.9996 | 1.0000 | 0.9994 | 0.9995 | 0.9995 |
| 95th PERC | 0.084• | 0.099• | 0.076• | 0.082• | 0.050• | 0.037• | 0.014 | 0.045• | 0.057• | 0.042• |
| Deviation of maximum average acceleration in 300 ms [g] | ||||||||||
| A–B | A–C | A–D | A–E | B–C | B–D | B–E | C–D | C–E | D–E | |
| MIN | 0.008 | 0.002 | 0.002 | 0.002 | 0.001 | 0.001 | 0.003 | 0.007 | 0.000 | 0..002 |
| AVG | 0.013 | 0.019 | 0.019 | 0.017 | 0.007 | 0.007 | 0.006 | 0.016 | 0.008 | 0.008 |
| MED | 0.012 | 0.024 | 0.024 | 0.016 | 0.005 | 0.005 | 0.006 | 0.015 | 0.008 | 0.007 |
| MAX | 0.022 | 0.028 | 0.028 | 0.034• | 0.021 | 0.021 | 0.008 | 0.029 | 0.019 | 0.018 |
| y | 1.0129x | 1.0185x | 1.0167x | 1.0189x | 1.0055x | 1.0038x | 1.0059x | 0.9981x | 1.0003x | 1.002x |
| R2 | 1.0000 | 0.9999 | 0.9999 | 1.0000 | 0.9999 | 0.9999 | 1.0000 | 0.9997 | 0.9999 | 0.9999 |
| 95th PERC | 0.020 | 0.028 | 0.028 | 0.033• | 0.018 | 0.018 | 0.008 | 0.026 | 0.018 | 0.016 |
| Deviation of maximum average acceleration in 1000 ms [g] | ||||||||||
| A–B | A–C | A–D | A–E | B–C | B–D | B–E | C–D | C–E | D–E | |
| MIN | 0.000 | 0.000 | 0.001 | 0.004 | 0.000 | 0.003 | 0.005 | 0.002 | 0.001 | 0.002 |
| AVG | 0.003 | 0.009 | 0.004 | 0.009 | 0.009 | 0.005 | 0.009 | 0.011 | 0.007 | 0..009 |
| MED | 0.003 | 0.010 | 0.004 | 0.009 | 0.007 | 0.004 | 0.009 | 0.011 | 0.006 | 0.010 |
| MAX | 0.008 | 0.019 | 0.009 | 0.015 | 0.017 | 0.012 | 0.011 | 0.027 | 0.013 | 0.017 |
| y | 0.9997x | 1.0077x | 0.9991x | 1.0092x | 1.008x | 0.9994x | 1.0095x | 0.9914x | 1.0013x | 1.01x |
| R2 | 1.0000 | 0.9999 | 1.0000 | 1.0000 | 0.9999 | 1.0000 | 1.0000 | 0.9999 | 0.9999 | 1.0000 |
| 95th PERC | 0.007 | 0.017 | 0.009 | 0.014 | 0.017 | 0.011 | 0.011 | 0.022 | 0.012 | 0.016 |
| Deviation of Maximum Average in 80 ms [g] | ||||||||||||
| A–B | A–C | A–D | B–C | B–D | C–D | |||||||
| MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | |
| Car | 0.087• | 0.084• | 0.101• | 0.099• | 0.076• | 0.076• | 0.060• | 0.050• | 0.040• | 0.037• | 0.049• | 0.045• |
| Series 1 | 0.033• | 0.026 | 0.044• | 0.039• | 0.054• | 0.054• | 0.021 | 0.018 | 0.038• | 0.025 | 0.035• | 0.023 |
| Series 2 | 0.053• | 0.043• | 0.064• | 0.060• | 0.057• | 0.053• | 0.054• | 0.041• | 0.053• | 0.040• | 0.046• | 0.038• |
| Series 3 | 0.048• | 0.045• | 0.147• | 0.116• | 0.043• | 0.035• | 0.132• | 0.103• | 0.017 | 0.014 | 0.137• | 0.105• |
| Series 4 | 0.028 | 0.027 | 0.067• | 0.064• | 0.027 | 0.026 | 0.055• | 0.048• | 0.011 | 0.011 | 0.050• | 0.045• |
| Series 5 | 0.075• | 0.056• | 0.188• | 0.114• | 0.056• | 0.054• | 0.145• | 0.076• | 0.019 | 0.014 | 0.136• | 0.073• |
| Series 6 | 0.050• | 0.048• | 0.085• | 0.077• | 0.056• | 0.052• | 0.052• | 0.052• | 0.031• | 0.028 | 0.070• | 0.066• |
| Series 7 | 0.047• | 0.041• | 0.095• | 0.075• | 0.038• | 0.036• | 0.049• | 0.033• | 0.029 | 0.029 | 0.077• | 0.062• |
| Series 8 | 0.058• | 0.040• | 0.054• | 0.049• | 0.048• | 0.036• | 0.046• | 0.044• | 0.035• | 0.029 | 0.053• | 0.037• |
| ALL | 0.087• | 0.052• | 0.188• | 0.079• | 0.076• | 0.056• | 0.145• | 0.052• | 0.053• | 0.030• | 0.137• | 0.057• |
| Deviation of maximum average in 300 ms [g] | ||||||||||||
| A–B | A–C | A–D | B–C | B–D | C–D | |||||||
| MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | |
| Car | 0.022 | 0.020 | 0.028 | 0.028 | 0.028 | 0.028 | 0.021 | 0.018 | 0.021 | 0.018 | 0.029 | 0.026 |
| Series 1 | 0.013 | 0.012 | 0.016 | 0.015 | 0.026 | 0.025 | 0.010 | 0.008 | 0.015 | 0.015 | 0.024 | 0.017 |
| Series 2 | 0.016 | 0.014 | 0.021 | 0.020 | 0.042• | 0.030• | 0.019 | 0.016 | 0.048• | 0.024 | 0.041• | 0.025 |
| Series 3 | 0.022 | 0.020 | 0.041• | 0.038• | 0.021 | 0.020 | 0.032• | 0.028 | 0.023 | 0.019 | 0.041• | 0.037• |
| Series 4 | 0.013 | 0.013 | 0.044• | 0.039• | 0.016 | 0.016 | 0.033• | 0.030• | 0.009 | 0.007 | 0.028 | 0.024 |
| Series 5 | 0.025 | 0.022 | 0.033• | 0.028 | 0.018 | 0.017 | 0.023 | 0.023 | 0.010 | 0.009 | 0.026 | 0.025 |
| Series 6 | 0.015 | 0.015 | 0.031• | 0.026 | 0.014 | 0.012 | 0.027 | 0.024 | 0.018 | 0.018 | 0.028 | 0.024 |
| Series 7 | 0.017 | 0.016 | 0.023 | 0.022 | 0.012 | 0.012 | 0.034• | 0.025 | 0.014 | 0.014 | 0.031• | 0.028 |
| Series 8 | 0.024 | 0.019 | 0.033• | 0.029 | 0.019 | 0.015 | 0.035• | 0.031• | 0.018 | 0.017 | 0.033• | 0.026 |
| ALL | 0.025 | 0.019 | 0.044• | 0.031• | 0.042• | 0.023 | 0.035• | 0.028 | 0.048• | 0.017 | 0.041• | 0.028 |
| Deviation of maximum average in 1000 ms [g] | ||||||||||||
| A–B | A–C | A–D | B–C | B–D | C–D | |||||||
| MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | MAX | 95th | |
| Car | 0.008 | 0.007 | 0.019 | 0.017 | 0.009 | 0.009 | 0.017 | 0.017 | 0.012 | 0.011 | 0.027 | 0.022 |
| Series 1 | 0.006 | 0.005 | 0.007 | 0.007 | 0.006 | 0.005 | 0.008 | 0.006 | 0.006 | 0.006 | 0.009 | 0.009 |
| Series 2 | 0.012 | 0.012 | 0.011 | 0.009 | 0.048• | 0.027 | 0.011 | 0.007 | 0.055• | 0.025 | 0.046• | 0.029 |
| Series 3 | 0.007 | 0.007 | 0.014 | 0.012 | 0.008 | 0.008 | 0.010 | 0.009 | 0.014 | 0.013 | 0.022 | 0.018 |
| Series 4 | 0.010 | 0.009 | 0.015 | 0.014 | 0.006 | 0.006 | 0.017 | 0.015 | 0.007 | 0.007 | 0.017 | 0.014 |
| Series 5 | 0.010 | 0.010 | 0.020 | 0.016 | 0.006 | 0.006 | 0.024 | 0.021 | 0.009 | 0.009 | 0.015 | 0.014 |
| Series 6 | 0..007 | 0.007 | 0.012 | 0.011 | 0.007 | 0.006 | 0.018 | 0.017 | 0.014 | 0.014 | 0.012 | 0.012 |
| Series 7 | 0.008 | 0.007 | 0.009 | 0.009 | 0.003 | 0.003 | 0.014 | 0.012 | 0.009 | 0.008 | 0.010 | 0.009 |
| Series 8 | 0.016 | 0.013 | 0.064• | 0.035• | 0.015 | 0.010 | 0.056• | 0.035• | 0.020 | 0.014 | 0.065• | 0.035• |
| ALL | 0.016 | 0.010 | 0.064• | 0.014 | 0.048• | 0.011 | 0.056• | 0.019 | 0.055 | 0.013 | 0.065• | 0.018 |
| Min RAW | Max RAW | Min 80 | Max 80 | Min 300 | Max 300 | Min 1000 | Max 1000 | |
|---|---|---|---|---|---|---|---|---|
| X [g] | −3.632 | 3.613 | −0.389 | 0.304 | −0.178 | 0.230 | −0.169 | 0.226 |
| Y [g] | −7.969 | 7.980 | −0.730 | 0.714 | −0.541 | 0.375 | −0.292 | 0.269 |
| Z [g] | −4.082 | 3.530 | −0.549 | 0.668 | −0.349 | 0.356 | −0.125 | 0.092 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gnap, J.; Jagelčák, J.; Marienka, P.; Frančák, M.; Kostrzewski, M. Application of MEMS Sensors for Evaluation of the Dynamics for Cargo Securing on Road Vehicles. Sensors 2021, 21, 2881. https://doi.org/10.3390/s21082881
Gnap J, Jagelčák J, Marienka P, Frančák M, Kostrzewski M. Application of MEMS Sensors for Evaluation of the Dynamics for Cargo Securing on Road Vehicles. Sensors. 2021; 21(8):2881. https://doi.org/10.3390/s21082881
Chicago/Turabian StyleGnap, Jozef, Juraj Jagelčák, Peter Marienka, Marcel Frančák, and Mariusz Kostrzewski. 2021. "Application of MEMS Sensors for Evaluation of the Dynamics for Cargo Securing on Road Vehicles" Sensors 21, no. 8: 2881. https://doi.org/10.3390/s21082881