Virtual Angle Boundary-Aware Particle Swarm Optimization to Maximize the Coverage of Directional Sensor Networks


Abstract
:1. Introduction
2. Related Work
3. System Model and Problem Formulation
3.1. System Model
3.2. Problem Formulation
4. An Area Coverage Optimization Scheme for DSNs
4.1. Constraint Conversion
4.2. VAB-PSO Algorithm
4.3. Realization of the Area Coverage Optimization Scheme
| Algorithm 1: VAB-PSO algorithm |
 |
5. Simulations and Comparisons
5.1. Parameters Setting
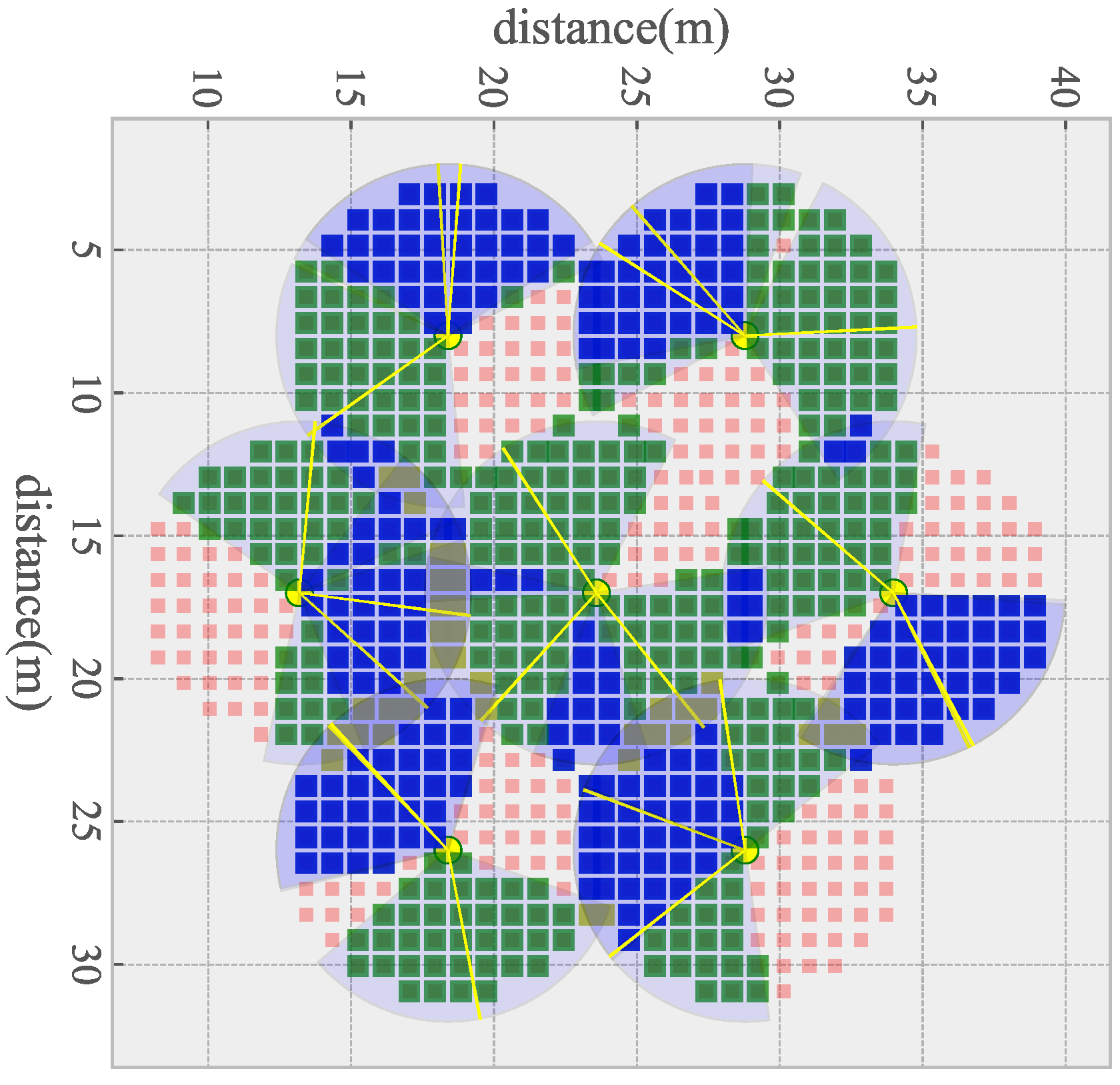
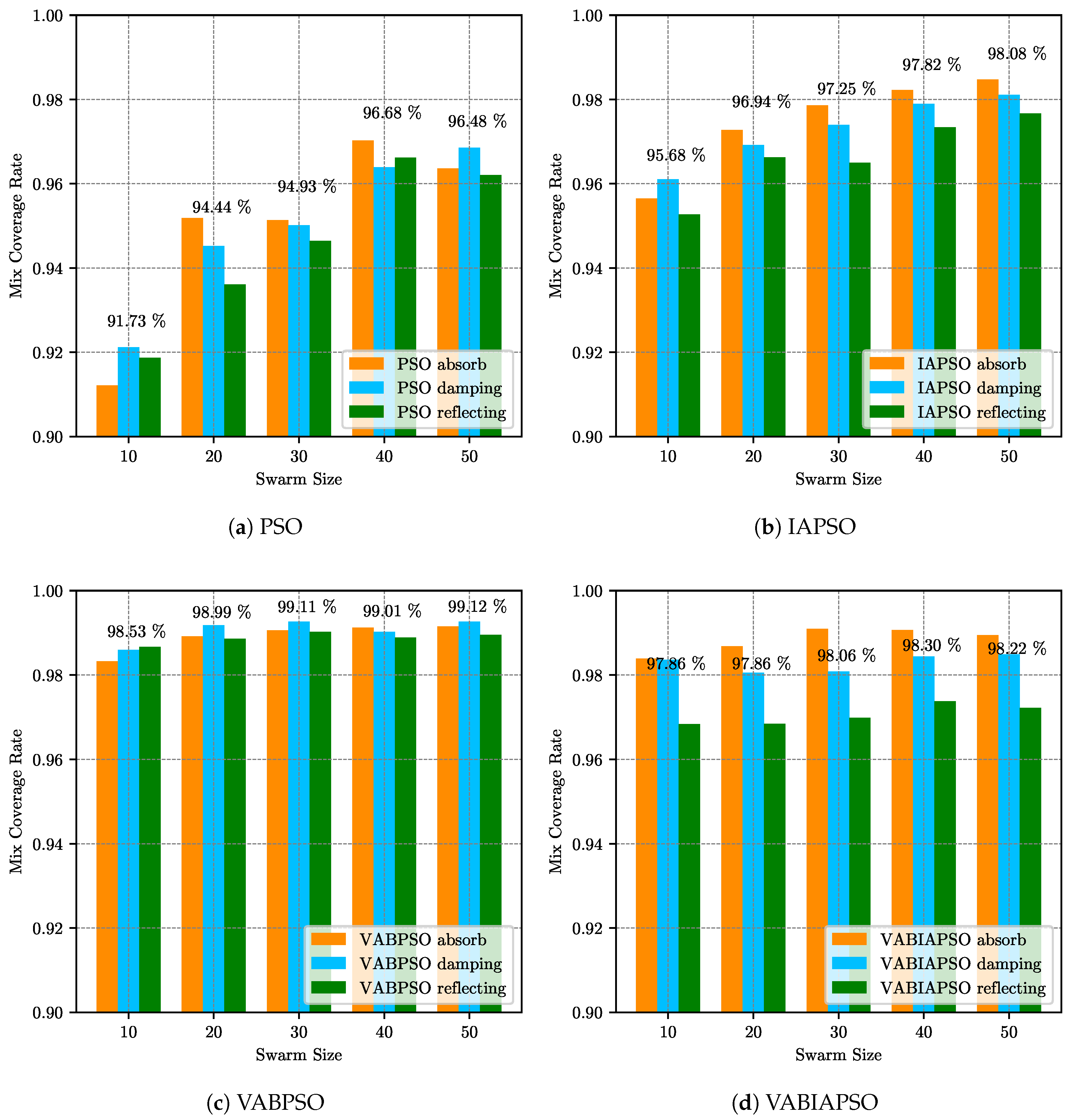
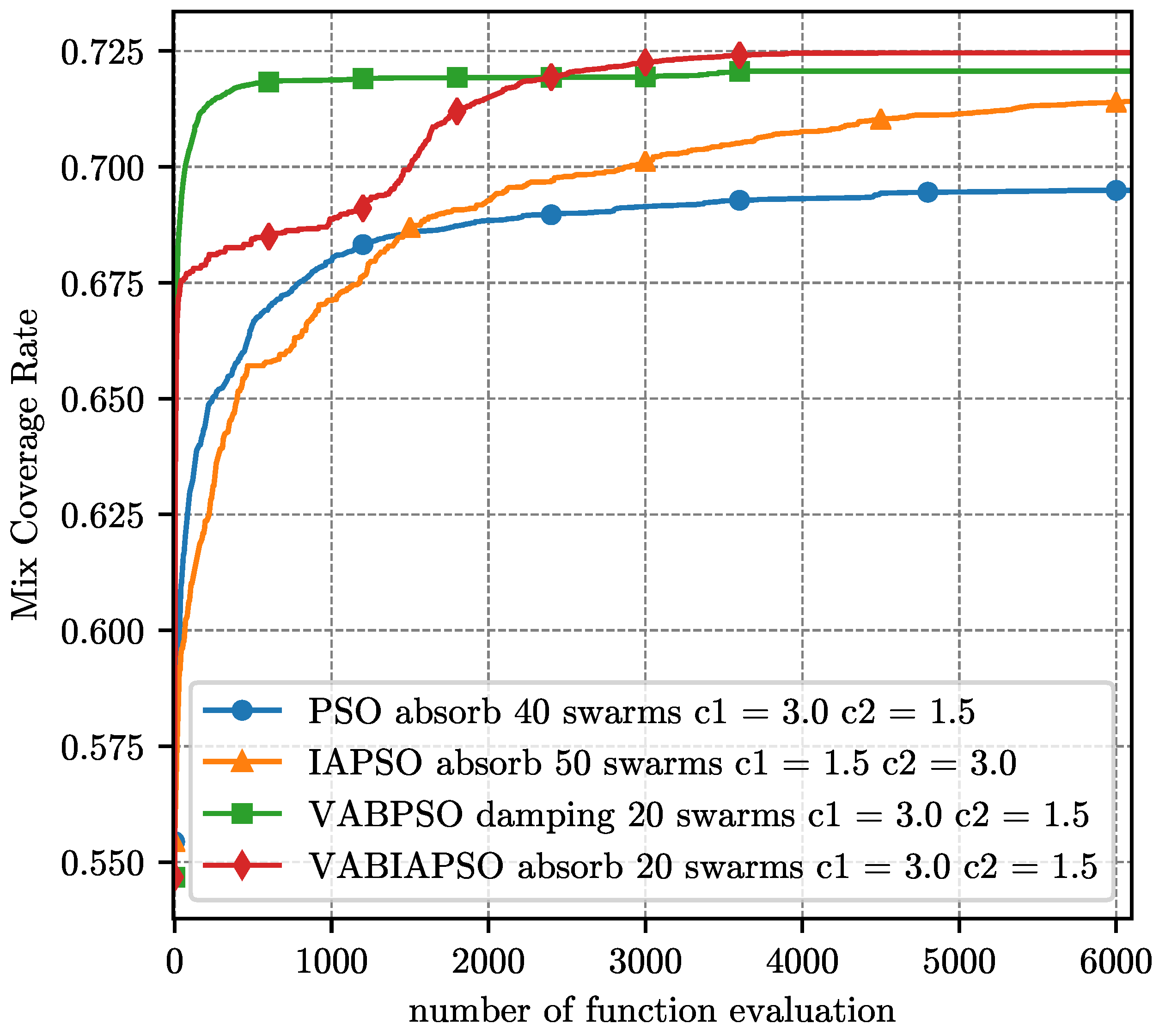
5.2. The Ideal Scene
5.3. The Real Scene
5.4. Algorithm Complexity Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Adedoyin, M.A.; Falowo, O.E. Combination of Ultra-Dense Networks and Other 5G Enabling Technologies: A Survey. IEEE Access 2020, 8, 22893–22932. [Google Scholar] [CrossRef]
- Chernyshev, M.; Baig, Z.; Bello, O.; Zeadally, S. Internet of Things (IoT): Research, Simulators, and Testbeds. IEEE Internet Things J. 2018, 5, 1637–1647. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Melodia, T.; Chowdhury, K.R. A survey on wireless multimedia sensor networks. Comput. Netw. 2007, 51, 921–960. [Google Scholar] [CrossRef]
- Güvensan, M.A.; Yavuz, A.G. On coverage issues in directional sensor networks: A survey. Ad Hoc Netw. 2011, 9, 1238–1255. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J.; Zhang, J.; Sun, W.; Kato, N. Mobile-Edge Computation Offloading for Ultradense IoT Networks. IEEE Internet Things J. 2018, 5, 4977–4988. [Google Scholar] [CrossRef]
- Liu, C.H.; Chen, Z.; Tang, J.; Xu, J.; Piao, C. Energy-Efficient UAV Control for Effective and Fair Communication Coverage: A Deep Reinforcement Learning Approach. IEEE J. Sel. Areas Commun. 2018, 36, 2059–2070. [Google Scholar] [CrossRef]
- Mostafaei, H. Stochastic barrier coverage in wireless sensor networks based on distributed learning automata. Comput. Commun. 2015, 55, 51–61. [Google Scholar] [CrossRef]
- Céspedes-Mota, A.; Castañón, G.; Martínez-Herrera, A.F.; Cárdenas-Barrón, L.E.; Sarmiento, A.M. Differential evolution algorithm applied to wireless sensor distribution on different geometric shapes with area and energy optimization. J. Netw. Comput. Appl. 2018, 119, 14–23. [Google Scholar] [CrossRef]
- Wang, S.; Yang, X.; Wang, X.; Qian, Z. A Virtual Force Algorithm-Lévy-Embedded Grey Wolf Optimization Algorithm for Wireless Sensor Network Coverage Optimization. Sensors 2019, 19, 2735. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhang, H.; Fan, S.; Gu, H. Coverage Control of Sensor Networks in IoT Based on RPSO. IEEE Internet Things J. 2018, 5, 3521–3532. [Google Scholar] [CrossRef]
- Sharmin, S.; Nur, F.N.; Razzaque, M.A.; Rahman, M.M.; Alelaiwi, A.; Hassan, M.M.; Rahman, S.M.M. alpha-Overlapping area coverage for clustered directional sensor networks. Comput. Commun. 2017, 109, 89–103. [Google Scholar] [CrossRef]
- Si, P.; Wu, C.; Zhang, Y.; Chu, H.; Teng, H. Probabilistic coverage in directional sensor networks. Wirel. Netw. 2019, 25, 355–365. [Google Scholar] [CrossRef]
- Liu, Z.; Jia, W.; Wang, G. Area coverage estimation model for directional sensor networks. Int. J. Embed. Syst. 2018, 10, 13–21. [Google Scholar] [CrossRef]
- Zhang, J.; Li, N.; Wu, N.; Wang, Y.; Shi, J. A coverage algorithm based on {D-S} theory for directional sensor networks. Int. J. Distrib. Sens. Netw. 2016, 12. [Google Scholar] [CrossRef] [Green Version]
- Sarker, L.; Chakravarty, S.; Rahman, A. A Graph Theoretic Approach for Maximizing Target Coverage using Minimum Directional Sensors in Randomly Deployed Wireless Sensor Networks. In Proceedings of the 2018 5th International Conference on Networking, Systems and Security (nsyss), Dhaka, Bangladesh, 18–20 December 2018. [Google Scholar]
- Zhang, G.; You, S.; Ren, J.; Li, D.; Wang, L. Local Coverage Optimization Strategy Based on Voronoi for Directional Sensor Networks. Sensors 2016, 16, 2183. [Google Scholar] [CrossRef] [PubMed]
- You, S.; Zhang, G.; Li, D. Coverage Improvement Strategy Based on Voronoi for Directional Sensor Networks. In Machine Learning and Intelligent Communications; Lecture Notes of the Institute for Computer Sciences Social Informatics and Telecommunications Engineering; Huang, X.L., Ed.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 183, pp. 247–256. [Google Scholar] [CrossRef]
- Li, M.; Hu, J.; Cao, X. A Two-Phase Coverage Control Algorithm for Self-Orienting Heterogeneous Directional Sensor Networks. IEEE Access 2020, 8, 88215–88226. [Google Scholar] [CrossRef]
- Li, F.; Luo, J.; Xin, S.Q.; He, Y. Autonomous deployment of wireless sensor networks for optimal coverage with directional sensing model. Comput. Netw. 2016, 108, 120–132. [Google Scholar] [CrossRef]
- Khanjary, M.; Sabaei, M.; Meybodi, M.R. Barrier coverage in adjustable-orientation directional sensor networks: A learning automata approach. Comput. Electr. Eng. 2018, 72, 859–876. [Google Scholar] [CrossRef]
- Li, W.; Huang, C.; Xiao, C.; Han, S. A heading adjustment method in wireless directional sensor networks. Comput. Netw. 2018, 133, 33–41. [Google Scholar] [CrossRef]
- Esmaeilzadeh, R.; Abbaspour, M. Optimum Temporal Coverage with Rotating Directional Sensors. Wirel. Pers. Commun. 2019, 105, 369–386. [Google Scholar] [CrossRef]
- Peng, S.; Xiong, Y. An Area Coverage and Energy Consumption Optimization Approach Based on Improved Adaptive Particle Swarm Optimization for Directional Sensor Networks. Sensors 2019, 19, 1192. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, T.; Mohan, A.S. A hybrid boundary condition for robust particle swarm optimization. IEEE Antennas Wirel. Propag. Lett. 2005, 4, 112–117. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Rahmat-Samii, Y. Boundary Conditions in Particle Swarm Optimization Revisited. IEEE Trans. Antennas Propag. 2007, 55, 760–765. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Meaning | Value |
|---|---|---|
| Sampling interval | 1 m | |
| m | Number of nodes | 7, 18 |
| Flare angle | [90, 120] | |
| R | Sensing distance | [6, 8] m |
| Particle weight | [0.1, 0.9] | |
| Particle swarm number | [10, 50] | |
| Iterations | [100, 6000] | |
| Correction factor 1 | 1.5, 2.1, 3.0 | |
| Correction factor 2 | 1.5, 2.1, 3.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, G.; Wei, H. Virtual Angle Boundary-Aware Particle Swarm Optimization to Maximize the Coverage of Directional Sensor Networks. Sensors 2021, 21, 2868. https://doi.org/10.3390/s21082868
Cheng G, Wei H. Virtual Angle Boundary-Aware Particle Swarm Optimization to Maximize the Coverage of Directional Sensor Networks. Sensors. 2021; 21(8):2868. https://doi.org/10.3390/s21082868
Chicago/Turabian StyleCheng, Gong, and Huangfu Wei. 2021. "Virtual Angle Boundary-Aware Particle Swarm Optimization to Maximize the Coverage of Directional Sensor Networks" Sensors 21, no. 8: 2868. https://doi.org/10.3390/s21082868