
A Bio-Inspired Compliance Planning and Implementation Method for Hydraulically Actuated Quadruped Robots with Consideration of Ground Stiffness


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Compliance Planning for Harmonic Locomotion
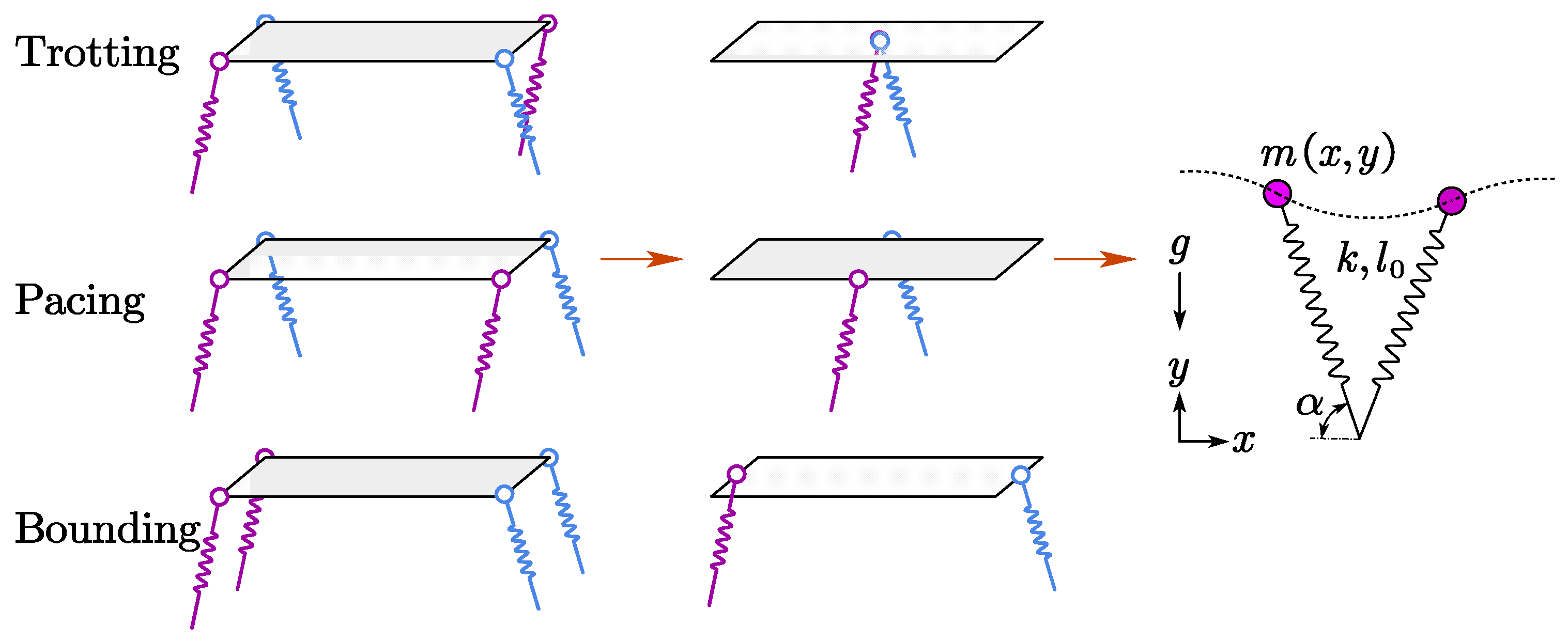
2.1. Principles of Harmonic Locomotion
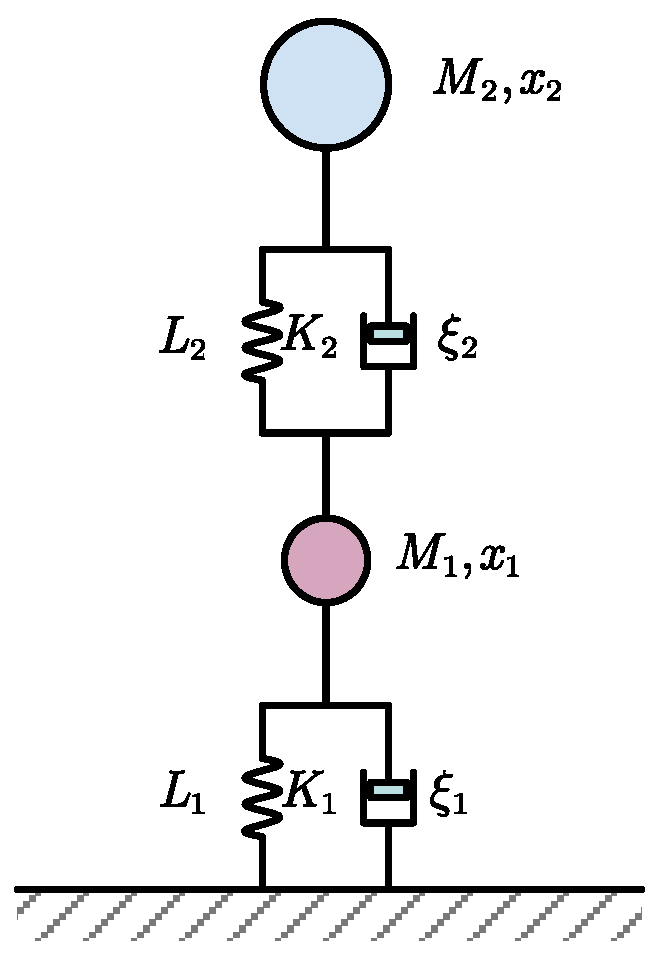
2.2. Surface Stiffness Estimation
2.3. Leg Compliance Planning
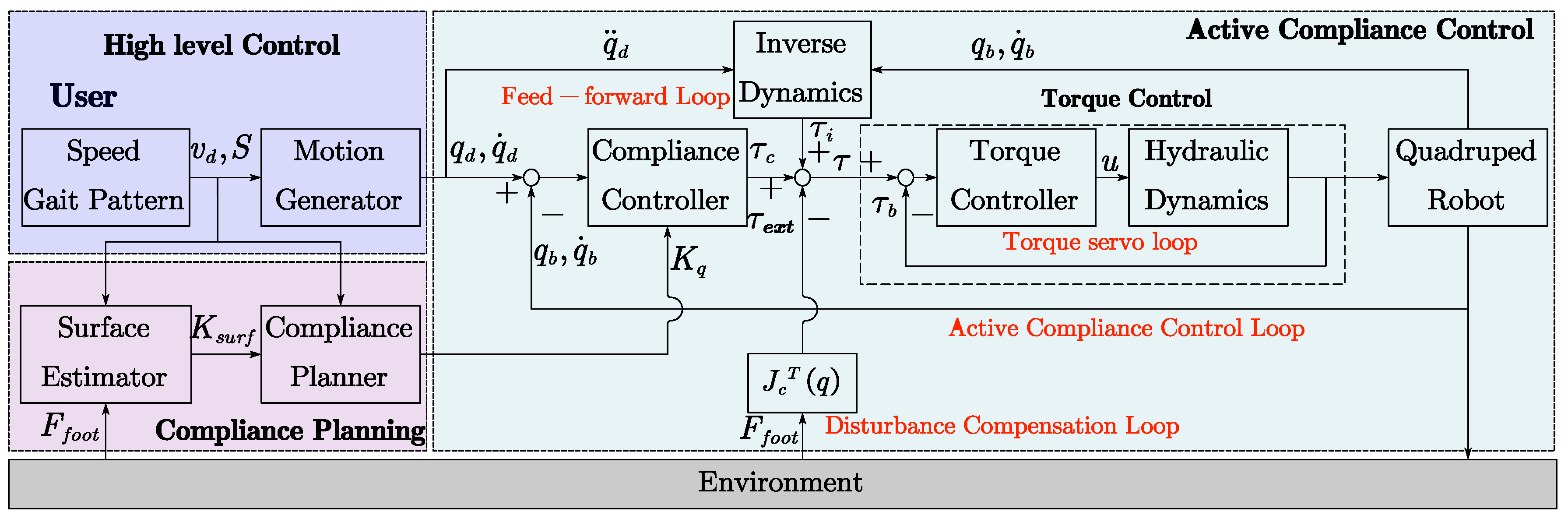
3. Control Framework for Harmonic Locomotion of a Quadruped Robot
4. Implementation for a Hydraulically Actuated Quadruped Robot
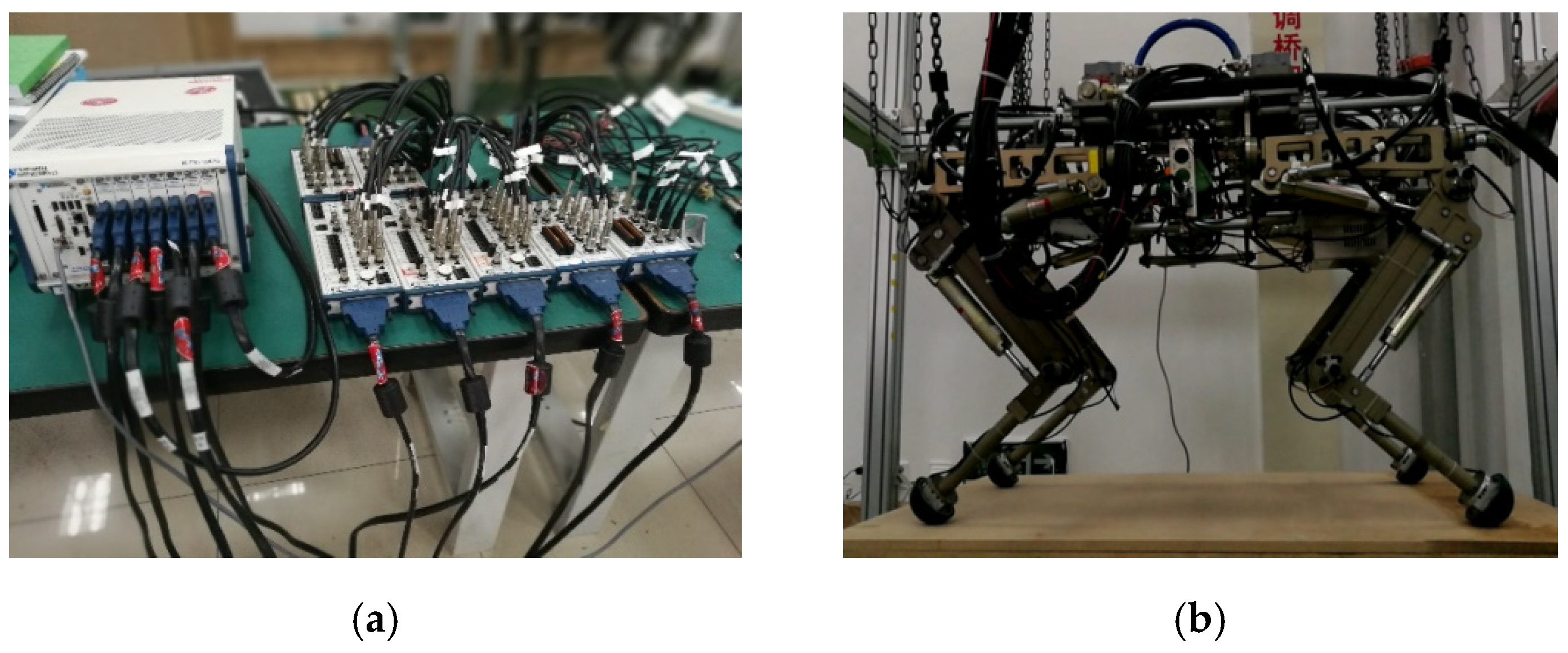
4.1. Overview of the Hydraulically Actuated Quadruped Robot
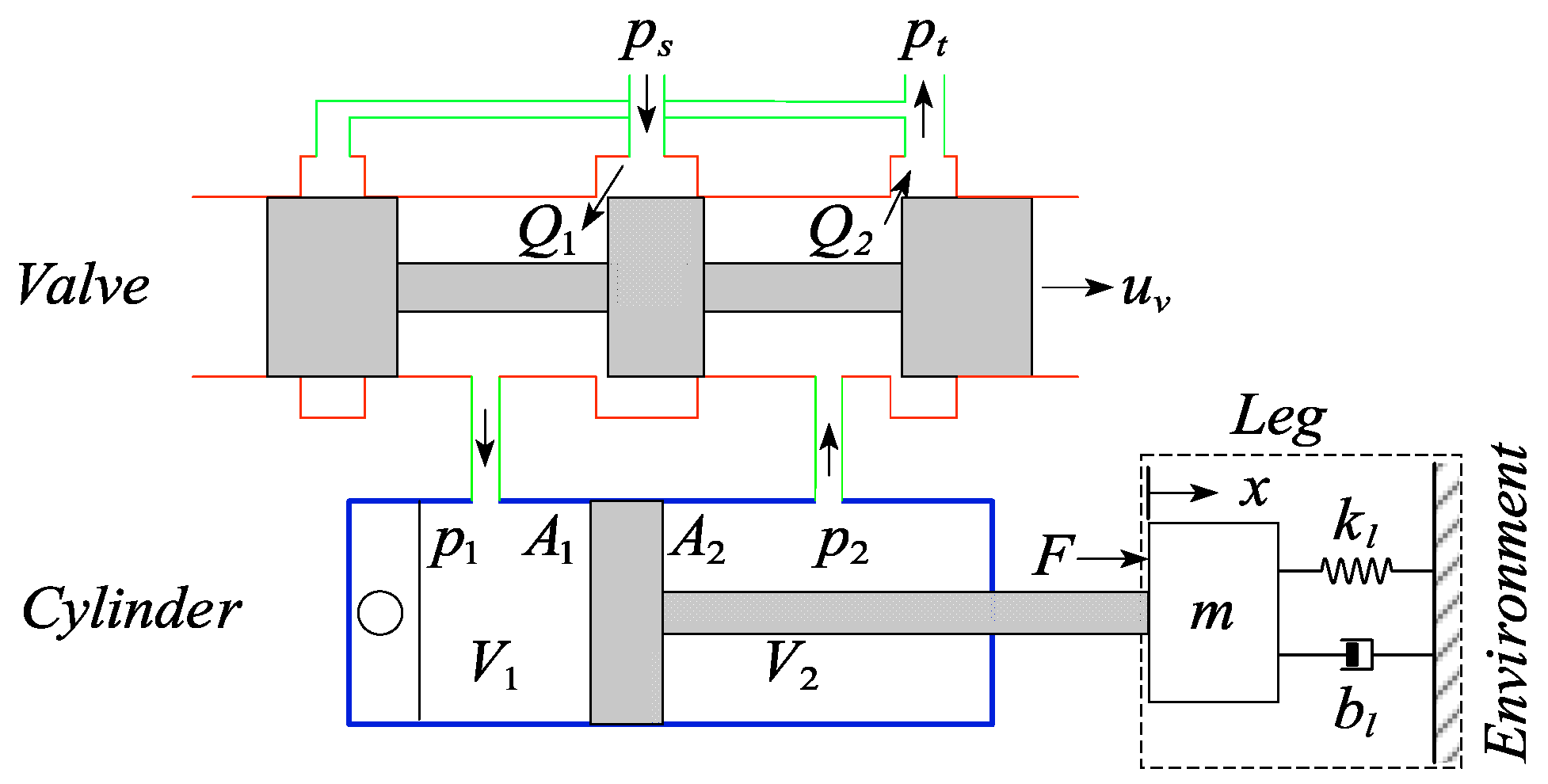
4.2. Force Control of the Hydraulic Actuator
4.3. Active Compliance Controller Design
5. Experiments and Simulations
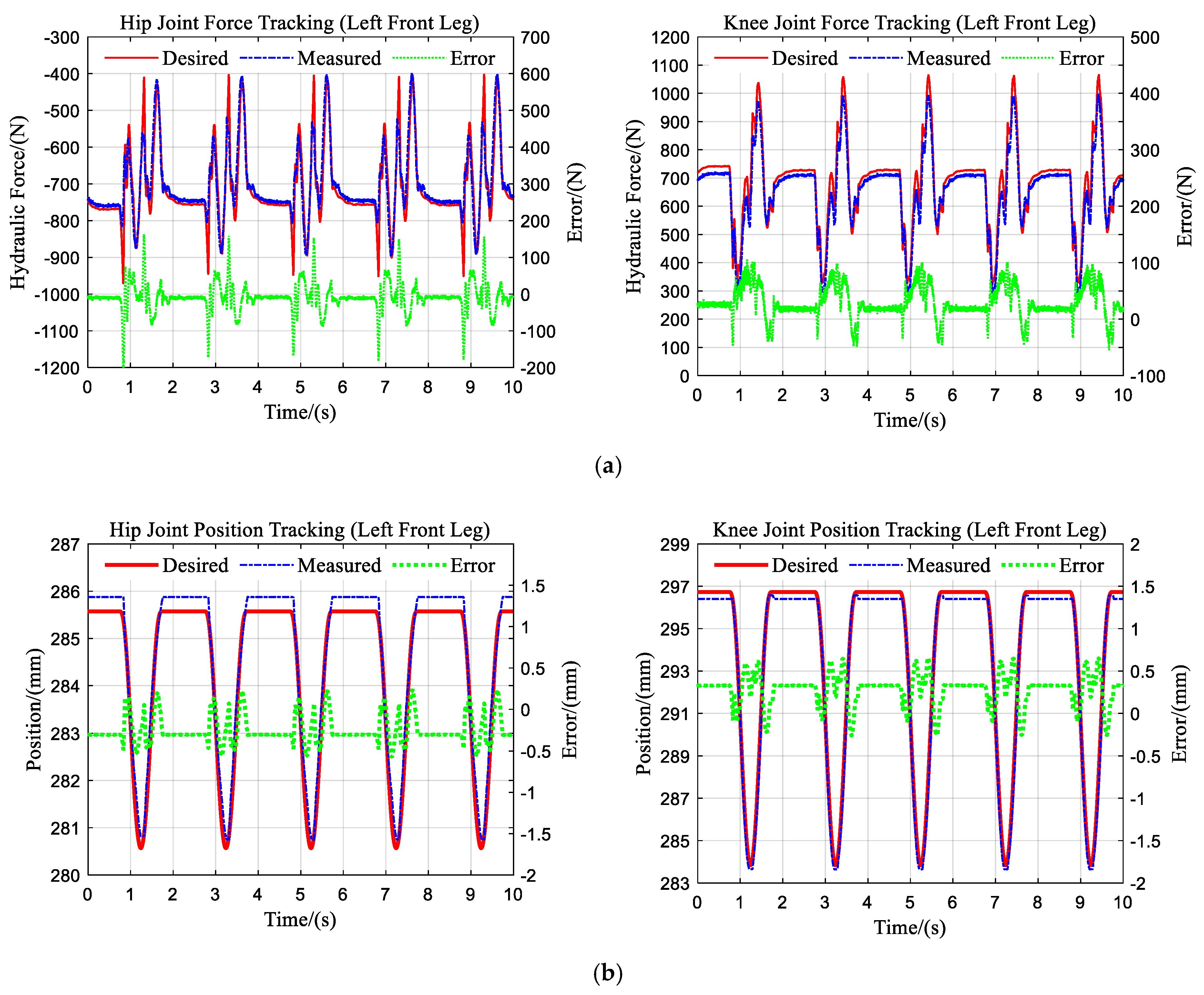
5.1. Experiments on Position/Force Tracking
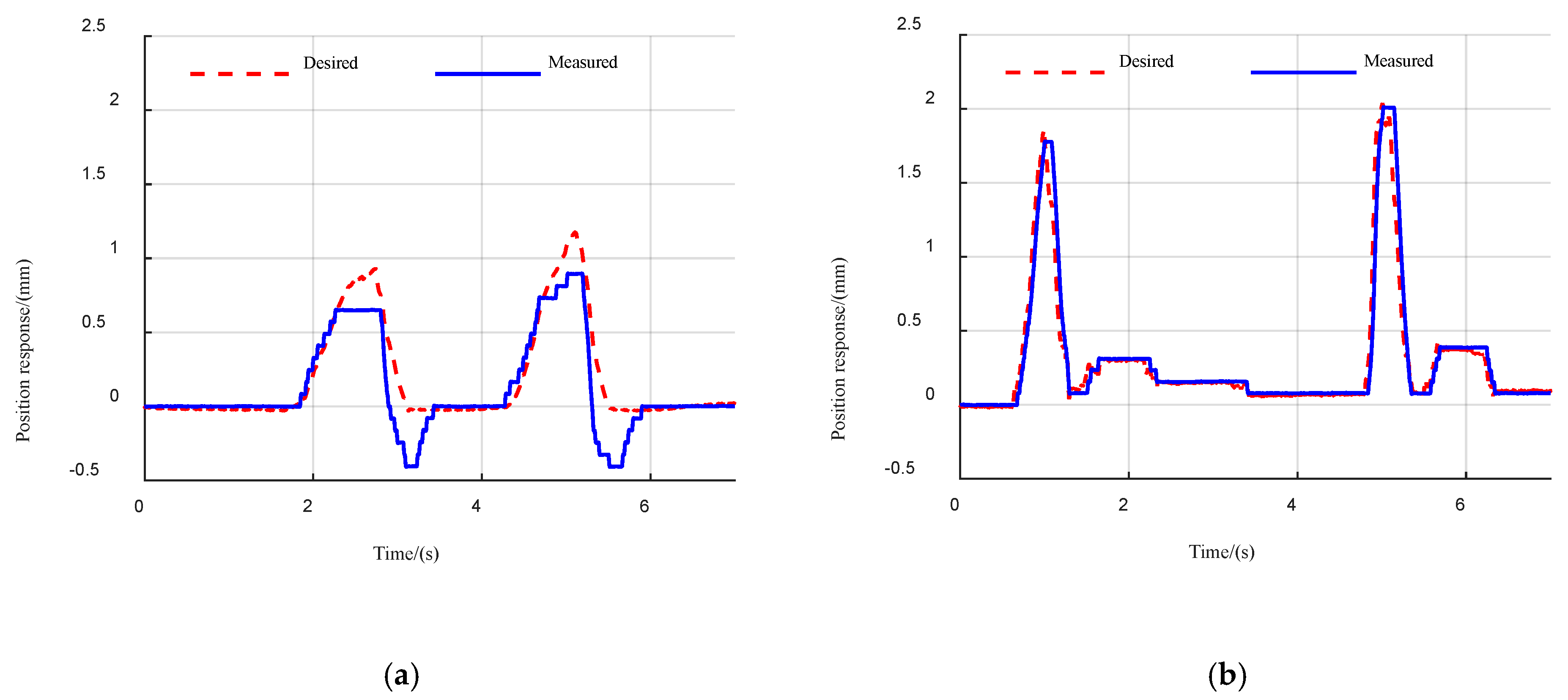
5.2. Experiments on Impact Disturbance
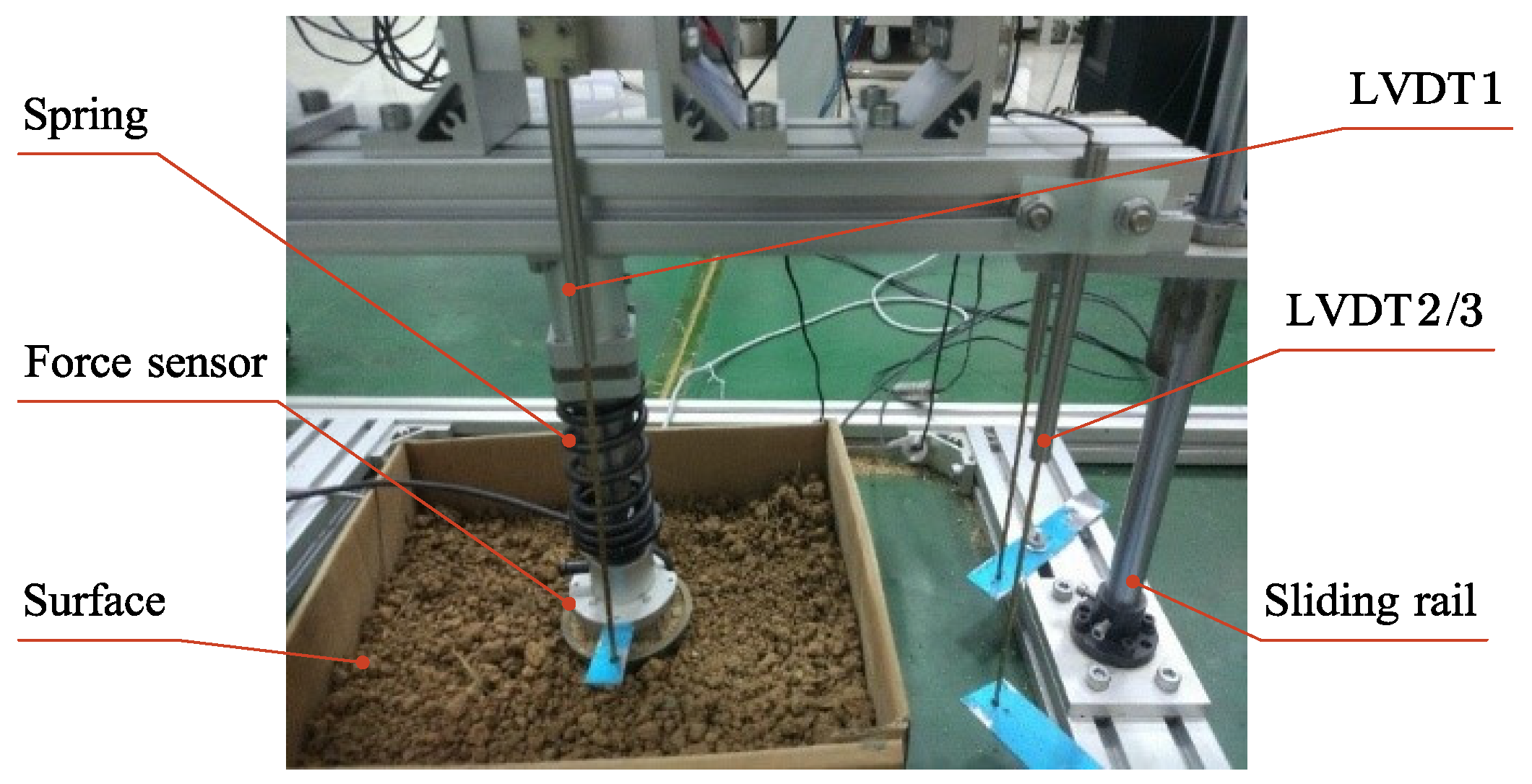
5.3. Experiments on Ground Surface Compliance Estimation
5.4. Simulation and Comparison of Energy Efficiency
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Raibert, M.H. Legged Robots that Balance; MIT Press: Cambridge MA, USA, 1986. [Google Scholar]
- Boston Dynamics. Robots. Available online: https://www.bostondynamics.com/robots (accessed on 1 February 2021).
- Hyun, D.J.; Seok, S.; Lee, J.; Kim, S. High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the MIT Cheetah. Int. J. Rob. Res. 2014, 33, 1417–1445. [Google Scholar] [CrossRef]
- Park, H.W.; Wensing, P.M.; Kim, S. High-speed bounding with the MIT Cheetah 2: Control design and experiments. Int. J. Rob. Res. 2017, 36, 167–192. [Google Scholar] [CrossRef]
- Di Carlo, J.; Wensing, P.M.; Katz, B.; Bledt, G.; Kim, S.; Kim, S. Dynamic locomotion in the mit cheetah 3 through convex model-predictive control. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Katz, B.; Carlo, J.D.; Kim, S. Mini Cheetah: A Platform for Pushing the Limits of Dynamic Quadruped Control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6295–6301. [Google Scholar]
- Hyun, D.J.; Lee, J.; Park, S.; Kim, S. Implementation of trot-to-gallop transition and subsequent gallop on the MIT Cheetah I. Int. J. Rob. Res. 2016, 35, 1627–1650. [Google Scholar] [CrossRef]
- Semini, C.; Barasuol, V.; Boaventura, T.; Frigerio, M.; Focchi, M.; Caldwell, D.G.; Buchli, J. Towards versatile legged robots through active impedance control. Int. J. Rob. Res. 2015, 34, 1003–1020. [Google Scholar] [CrossRef]
- Boaventura, T.; Buchli, J.; Semini, C.; Caldwell, D.G. Model-Based Hydraulic Impedance Control for Dynamic Robots. IEEE Trans. Rob. 2015, 31, 1324–1336. [Google Scholar] [CrossRef] [Green Version]
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Bloesch, M.; et al. ANYmal—Toward legged robots for harsh environments. Adv. Rob. 2017, 31, 918–931. [Google Scholar] [CrossRef]
- Jenelten, F.; Hwangho, J.; Tresoldi, F.; Bellicoso, D.; Hutter, M. Dynamic Locomotion on Slippery Ground. IEEE Rob. Autom. Lett. 2019, 4, 4170–4176. [Google Scholar] [CrossRef] [Green Version]
- Unitree Robotics. Aliengo. Available online: https://www.unitree.com/products/aliengo (accessed on 10 April 2021).
- Deep Robotics. Jueying Robots. Available online: http://deeprobotics.cn/en/products.html (accessed on 10 April 2021).
- Yang, C.Y.; Yuan, K.; Zhu, Q.G.; Yu, W.M.; Li, Z.B. Multi-expert learning of adaptive legged locomotion. Sci. Rob. 2020, 5, eabb2174. [Google Scholar] [CrossRef]
- Kashiri, N.; Abate, A.; Abram, S.J.; Albu-Schaffer, A.; Clary, P.J.; Daley, M.; Faraji, S.; Furnemont, R.; Garabini, M.; Geyer, H.; et al. An Overview on Principles for Energy Efficient Robot Locomotion. Front. Rob. AI 2018, 5, 129. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dickinson, M.H.; Farley, C.T.; Full, R.J.; Koehl, M.A.R.; Kram, R.; Lehman, S. How animals move: An integrative view. Science 2000, 288, 100–106. [Google Scholar] [CrossRef] [Green Version]
- Biewener, A.A.; Patek, S.N. Animal Locomotion; Oxford University Press: New York, NY, USA, 2018. [Google Scholar]
- Full, R.J.; Koditschek, D.E. Templates and anchors: Neuromechanical hypotheses of legged locomotion on land. J. Exp. Biol. 1999, 202, 3325–3332. [Google Scholar] [PubMed]
- Yu, H.; Gao, H.; Deng, Z. Toward a Unified Approximate Analytical Representation for Spatially Running Spring-Loaded Inverted Pendulum Model. IEEE Trans. Rob. 2020, 37, 1–8. [Google Scholar] [CrossRef]
- Alexander, R.M. Principles of Animal Locomotion; Princeton University Press: Princeton, NJ, USA, 2003. [Google Scholar]
- Farris, D.J.; Raiteri, B.J. Elastic ankle muscle-tendon interactions are adjusted to produce acceleration during walking in humans. J. Exp. Biol. 2017, 220, 4252–4260. [Google Scholar] [CrossRef] [Green Version]
- Ferris, D.P.; Farley, C.T. Interaction of leg stiffness and surface stiffness during human hopping. J. Appl. Physiol. 1997, 82, 15–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ferris, D.P.; Liang, K.L.; Farley, C.T. Runners adjust leg stiffness for their first step on a new running surface. J. Biomech. 1999, 32, 787–794. [Google Scholar] [CrossRef]
- Kim, S.; Park, S. Leg stiffness increases with speed to modulate gait frequency and propulsion energy. J. Biomech. 2011, 44, 1253–1258. [Google Scholar] [CrossRef]
- Silder, A.; Besier, T.; Delp, S.L. Running with a load increases leg stiffness. J. Biomech. 2015, 48, 1003–1008. [Google Scholar] [CrossRef] [PubMed]
- Cavagna, G.A.; Legramandi, M.A. Running, hopping and trotting: Tuning step frequency to the resonant frequency of the bouncing system favors larger animals. J. Exp. Biol. 2015, 218, 3276–3283. [Google Scholar] [CrossRef] [Green Version]
- Alexander, R.M.; Bennet-Clark, H. Storage of elastic strain energy in muscle and other tissues. Nature 1977, 265, 114–117. [Google Scholar] [CrossRef] [PubMed]
- Burdet, E.; Osu, R.; Franklin, D.W.; Milner, T.E.; Kawato, M. The central nervous system stabilizes unstable dynamics by learning optimal impedance. Nature 2001, 414, 446–449. [Google Scholar] [CrossRef]
- Ahlborn, B.K.; Blake, R.W. Walking and running at resonance. Zoology 2002, 105, 165–174. [Google Scholar] [CrossRef]
- Cavagna, G.A.; Mantovani, M.; Willems, P.A.; Musch, G. The resonant step frequency in human running. Pflug. Arch. Eur. J. Physiol. 1997, 434, 678–684. [Google Scholar] [CrossRef] [PubMed]
- Blickhan, R.; Seyfarth, A.; Geyer, H.; Grimmer, S.; Wagner, H.; Gunther, M. Intelligence by mechanics. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 199–220. [Google Scholar] [CrossRef] [PubMed]
- Raibert, M.H.; Brown, H.B.; Chepponis, M. Experiments in balance with a 3D one-legged hopping machine. Int. J. Robot. Res. 1984, 3, 75–92. [Google Scholar] [CrossRef]
- Raibert, M.H.; Chepponis, M.; Brown, H.B., Jr. Running on four legs as though they were one. Robot. Autom. IEEE J. 1986, 2, 70–82. [Google Scholar] [CrossRef] [Green Version]
- Raibert, M.H. Trotting, pacing and bounding by a quadruped robot. J. Biomech. 1990, 23, 7983–8198. [Google Scholar] [CrossRef]
- Park, H.-W.; Chuah, M.Y.; Kim, S. Quadruped bounding control with variable duty cycle via vertical impulse scaling. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3245–3252. [Google Scholar]
- Park, H.-W.; Park, S.; Kim, S. Variable-speed quadrupedal bounding using impulse planning: Untethered high-speed 3d running of mit cheetah 2. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5163–5170. [Google Scholar]
- Park, H.W.; Kim, S. Quadrupedal galloping control for a wide range of speed via vertical impulse scaling. Bioinspir. Biomim. 2015, 10, 025003. [Google Scholar] [CrossRef] [PubMed]
- Valenzuela, A.K.; Kim, S. Optimally scaled hip-force planning: A control approach for quadrupedal running. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1901–1907. [Google Scholar]
- Wensing, P.M.; Wang, A.; Seok, S.; Otten, D.; Lang, J.; Kim, S. Proprioceptive Actuator Design in the MIT Cheetah: Impact Mitigation and High-Bandwidth Physical Interaction for Dynamic Legged Robots. IEEE Trans. Rob. 2017, 33, 509–522. [Google Scholar] [CrossRef]
- Seok, S.; Wang, A.; Chuah, M.Y.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design Principles for Energy-Efficient Legged Locomotion and Implementation on the MIT Cheetah Robot. IEEE-ASME Trans. Mech. 2015, 20, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- Park, H.W.; Wensing, P.M.; Kim, S. Online Planning for Autonomous Running Jumps Over Obstacles in High-Speed Quadrupeds. In Proceedings of the 2015 Robotics: Science and Systems Conference (RSS), Rome, Italy, 13–17 July 2015; pp. 1–9. [Google Scholar]
- Farshidian, F.; Jelavić, E.; Winkler, A.W.; Buchli, J. Robust whole-body motion control of legged robots. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4589–4596. [Google Scholar]
- Fahmi, S.; Mastalli, C.; Focchi, M.; Semini, C. Passive Whole-Body Control for Quadruped Robots: Experimental Validation Over Challenging Terrain. IEEE Rob. Autom. Lett. 2019, 4, 2553–2560. [Google Scholar] [CrossRef] [Green Version]
- Fahmi, S.; Focchi, M.; Radulescu, A.; Fink, G.; Barasuol, V.; Semini, C. STANCE: Locomotion Adaptation Over Soft Terrain. IEEE Trans. Rob. 2020, 36, 443–457. [Google Scholar] [CrossRef]
- Chai, H.; Meng, J.; Rong, X.; Li, Y.J.R. Design and implementation of scalf, an advanced hydraulic quadruped robot. Robot 2014, 36, 385–391. [Google Scholar]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. Bigdog, the rough-terrain quadruped robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef] [Green Version]
- Semini, C. HyQ Design and Development of a Hydraulically Actuated Quadruped Robot; University of Genoa: Genoa, Italy, 2010. [Google Scholar]
- Hutter, M.; Remy, C.D.; Hoepflinger, M.A.; Siegwart, R. ScarlETH Design and control of a planar running robot. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 562–567. [Google Scholar]
- Reher, J.; Ma, W.; Ames, A.D. Dynamic Walking with Compliance on a Cassie Bipedal Robot. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 2589–2595. [Google Scholar]
- Vanderborght, B.; Albu-Schaeffer, A.; Bicchi, A.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.; Eiberger, O.; Friedl, W.; Ganesh, G.; et al. Variable impedance actuators: A review. Rob. Auton. Syst. 2013, 61, 1601–1614. [Google Scholar] [CrossRef] [Green Version]
- Wolf, S.; Grioli, G.; Eiberger, O.; Friedl, W.; Grebenstein, M.; Hoppner, H.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.G.; et al. Variable Stiffness Actuators: Review on Design and Components. IEEE-ASME Trans. Mech. 2016, 21, 2418–2430. [Google Scholar] [CrossRef]
- Zhang, X.; Jiang, X.; Luo, X.; Chen, X. Design of an Active Compliance Controller for a Bionic Hydraulic Quadruped Robot. Comput. Vis. 2017, 10463, 846–855. [Google Scholar]
- Aung, M.T.S.; Kikuuwe, R. Stability enhancement of admittance control with acceleration feedback and friction compensation. Mechatronics 2017, 45, 110–118. [Google Scholar] [CrossRef]
- Yang, C.G.; Peng, G.Z.; Li, Y.N.; Cui, R.X.; Cheng, L.; Li, Z.J. Neural Networks Enhanced Adaptive Admittance Control of Optimized Robot-Environment Interaction. IEEE Trans. Cybern. 2019, 49, 2568–2579. [Google Scholar] [CrossRef] [Green Version]
- Pratt, J.; Chew, C.M.; Torres, A.; Dilworth, P.; Pratt, G. Virtual model control: An intuitive approach for bipedal locomotion. Int. J. Rob. Res. 2001, 20, 129–143. [Google Scholar] [CrossRef]
- Blum, Y.; Lipfert, S.W.; Rummel, J.; Seyfarth, A. Swing leg control in human running. Bioinspir. Biomim. 2010, 5, 026006. [Google Scholar] [CrossRef] [Green Version]
- Pan, Q.; Li, Y.B.; Huang, M.H. Control-oriented friction modeling of hydraulic actuators based on hysteretic nonlinearity of lubricant film. Mechatronics 2018, 53, 72–84. [Google Scholar] [CrossRef]
- Liu, P.C.; Yu, H.N.; Cang, S. Modelling and analysis of dynamic frictional interactions of vibro-driven capsule systems with viscoelastic property. Eur. J. Mech. A-Solid 2019, 74, 16–25. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Yi, H.; Liu, J.; Li, Q.; Luo, X. A Bio-Inspired Compliance Planning and Implementation Method for Hydraulically Actuated Quadruped Robots with Consideration of Ground Stiffness. Sensors 2021, 21, 2838. https://doi.org/10.3390/s21082838
Zhang X, Yi H, Liu J, Li Q, Luo X. A Bio-Inspired Compliance Planning and Implementation Method for Hydraulically Actuated Quadruped Robots with Consideration of Ground Stiffness. Sensors. 2021; 21(8):2838. https://doi.org/10.3390/s21082838
Chicago/Turabian StyleZhang, Xiaoxing, Haoyuan Yi, Junjun Liu, Qi Li, and Xin Luo. 2021. "A Bio-Inspired Compliance Planning and Implementation Method for Hydraulically Actuated Quadruped Robots with Consideration of Ground Stiffness" Sensors 21, no. 8: 2838. https://doi.org/10.3390/s21082838