
Soft Grippers for Automatic Crop Harvesting: A Review


Abstract
:1. Introduction
2. Harvesting Process
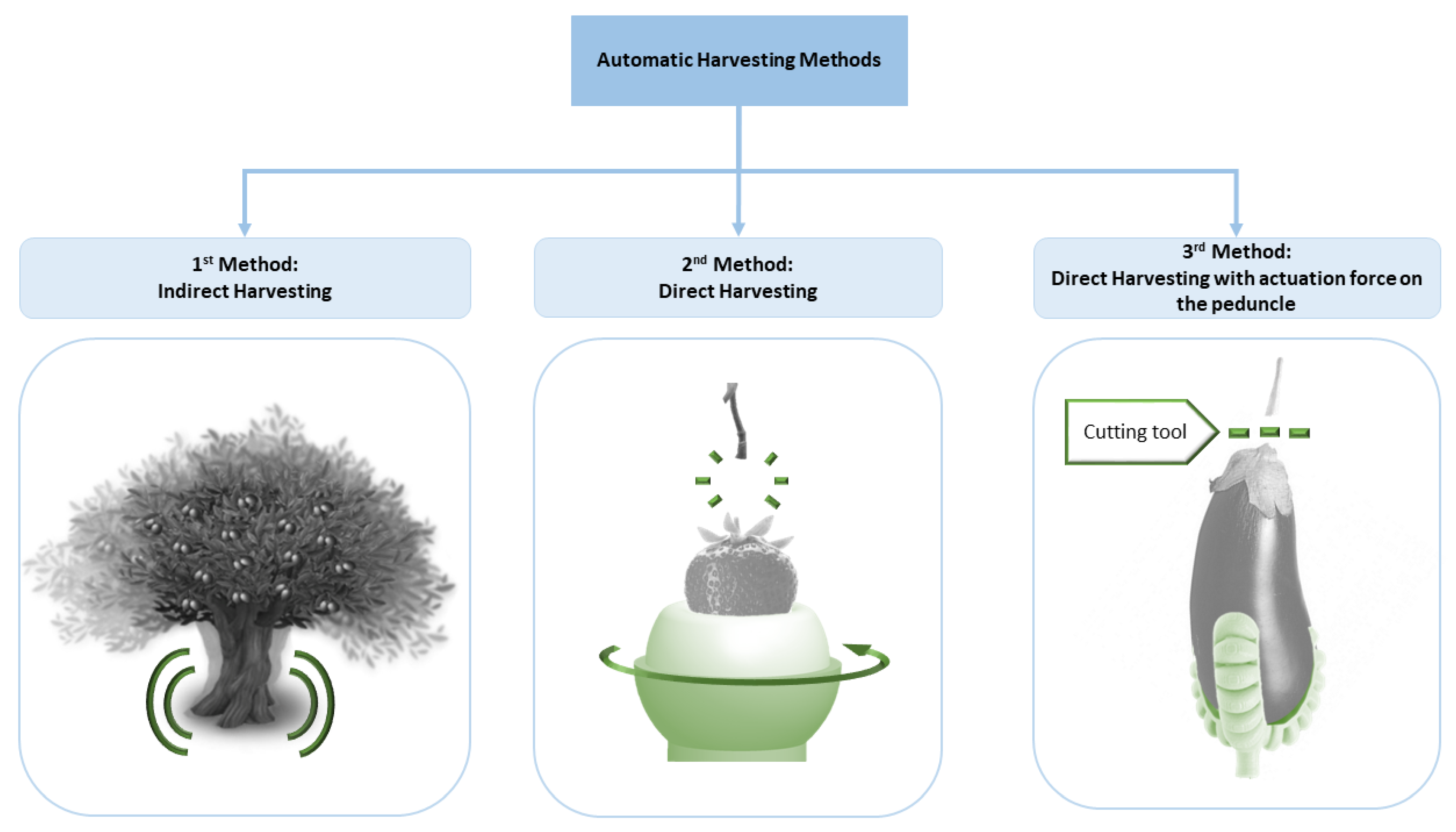
2.1. Harvesting Process Classification
- (1)
- Indirect harvesting: a technique that involves indirect mechanical movement towards the fruit through a force applied to the plant itself, such as that carried out when harvesting olives [37], almonds [38] or pistachio nuts [39]. To make the fruits fall without any contact points, methods such as air blasting, limb shaking, trunk shaking and canopy shaking are often used [34,35].
- (2)
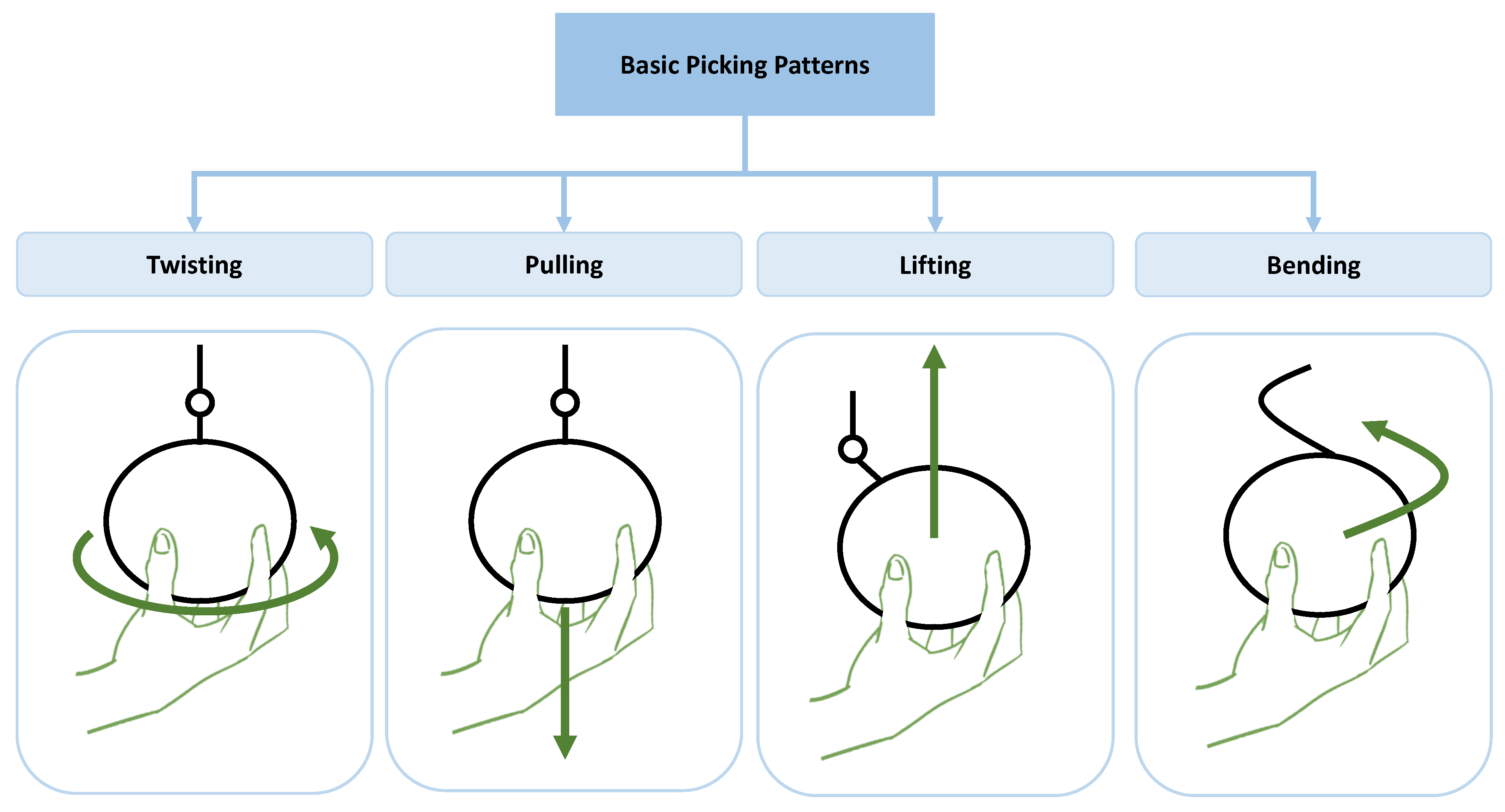
- Direct harvesting: a method used in those crops that, due to the structural characteristics of the plant, cannot be shaken but require the direct application of a mechanical force on the fruit or its peduncle; these picking techniques, which are discussed in more detail in Section 2.2, are also known as picking patterns (e.g., twisting, pulling or bending) and cause fruits to detach from the stem [40]. Examples from this group are the methods used in the harvesting of strawberries [40,41], apples [42,43,44,45] and several varieties of tomatoes [46,47,48,49].
- (3)
- Direct harvesting with an actuation force on the peduncle: a technique that is applied to those fruits that require a direct mechanical movement, or another type of cutting method, applied directly to the stalk since due to their morphology they are connected to the plant by a hard peduncle that must be cut, as in the harvest of aubergines [50,51], melons [52], oranges [53], cucumbers [54] and peppers [55,56,57].
2.2. Picking Patterns
2.3. Direct Harvesting with an Actuation Force on the Peduncle
2.4. Literature Overview of Crop Harvesting Automation
3. Soft Grippers
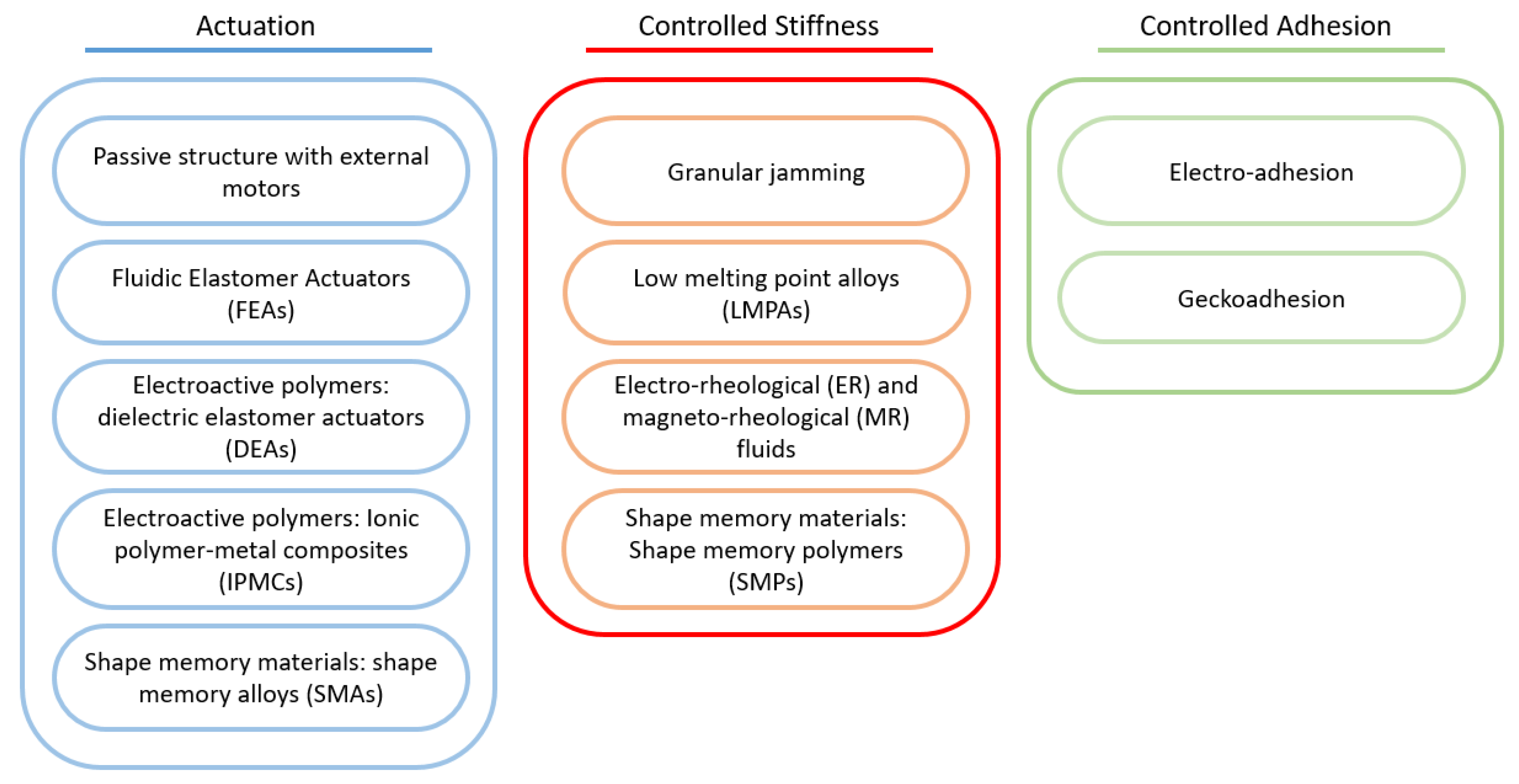
- Object size: This is one of the most critical aspects to evaluate soft technology since its use in certain crops depends on it. Passive structures with external motors, fluidic elastomer actuators (FEAs) and controlled adhesion are the technologies with the best capacity to grasp large objects.
- Gripper size: Another criterion is the size of the device, which can be critical to access certain crops.
- Lifting ratio or operation range: This variable can be interpreted as the ratio between the mass of the object and the mass of the gripper or as the force that the soft actuator can exert. If interpreted as a ratio, it should always be related to the maximum size of the object that can be grasped. For example, shape memory alloy (SMA) actuators have a higher lift ratio than FEAs but a less manipulable object size, which reduces their suitability for fruit picking.
- Power consumption: Each soft technology requires a different type of support device. The technologies that require electric motors or pumps to operate demand the highest energy consumption.
- Scalability: This feature takes into account not only the ease of manufacture but also the modularity of the technology used. This is especially important for the adaptation of soft grippers to various types of crops, and it is desirable that they be as universal as possible to increase their viability.
- Controllability: Depending on the soft technology used, several proposals for low-level control systems can be found. Normally, the most widely used control method is open-loop. With respect to fluidic actuators, liquid-based devices can exhibit more linearity than pneumatic devices.
- Response time: This variable can affect the efficiency of the agricultural task. It may be difficult for soft actuators that rely on a fluid to achieve high actuation frequencies due to the fluidic impedance of the channel and the flow actuation level.
- Surface conditions: Soft gripper technologies that require a clean surface, such as controlled adhesion, are less suitable than those that do not have any surface-related requirements.
- Degree of skill to working in unstructured environments: Although soft technology is one of the most suitable for working in unstructured environments, not all soft grippers that can be found in the literature are suitable for agriculture scenarios. This is the case for devices that require complex support devices that are sensitive to large holes or that can suffer tears from sharp objects [192].
- Mechanical compliance: Each soft technology has an advantage in terms of compliance. For instance, FEAs, shape memory polymer (SMP) actuators and dielectric electroactive polymer (DEAP) actuators are inherently compliant due to the materials used. With other technologies, such as SMA actuators, this parameter depends on the shape of their structures.
- Lifetime: The parameter is the number of cycles that a soft actuator can remain in operation before failing or exhibiting altered motion patterns. Lifetime is an important characteristic in FEA technology, which is subjected to constant fill and empty cycles that tend to wear away the material.
- Technology readiness level (TRL) [189]: Another criterion to compare the feasibility of each technology could be the TRL. Those that have experimentally demonstrated their efficiency in real operating environments, as well as those that are also easier to put into production due to the type of support devices they use and the materials and manufacturing process they require, have a higher TRL.
3.1. Materials and Manufacturing Methods
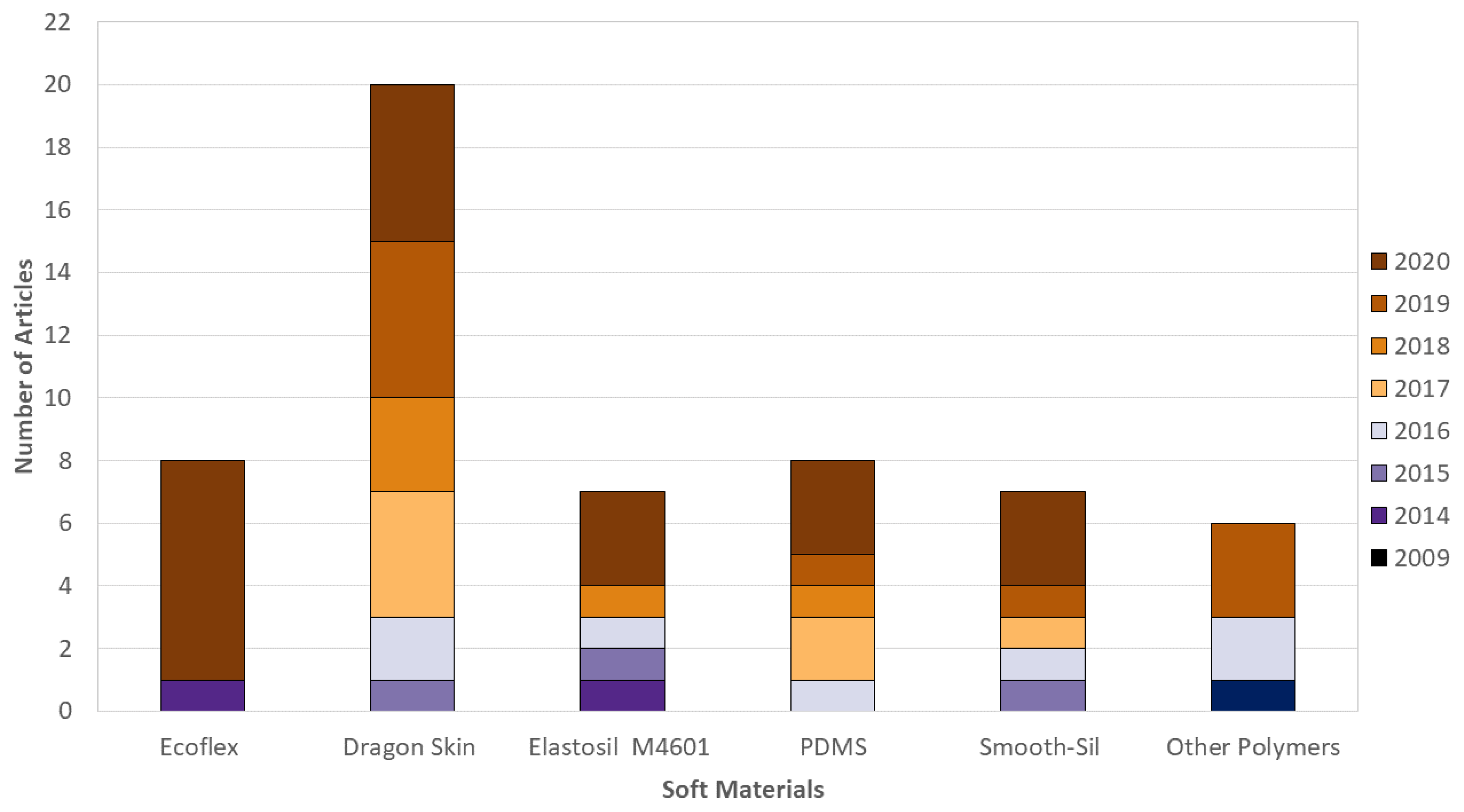
3.1.1. Materials
3.1.2. Manufacturing Methods
3.2. Soft Grippers for Food
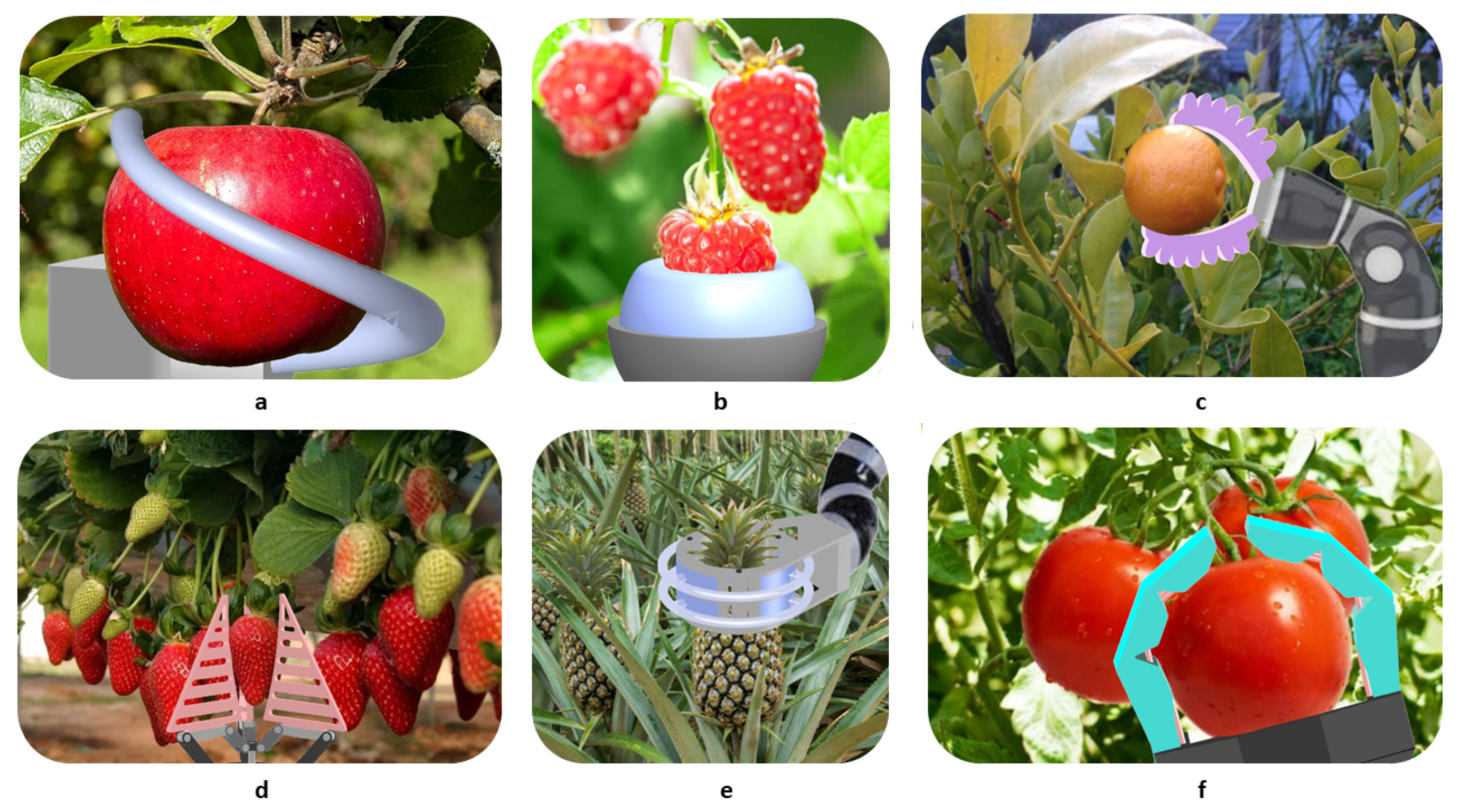
- FEA [206,220,224,225,230,236,246,247,248,249,250,251]: This type of actuator technology is emerging as a potential winner for fruit handling. This is due to the use of affordable materials, the simplicity of their manufacture and control, and the grip strength obtained. Special mention should be made of the solution proposed in [223], which can be defined as a hybrid gripper, combining vacuum pressure and an origami-inspired compliant structure. This design has a high gripping force of approximately 50 N, and the authors provide a detailed study of its grasping.
- Tendon-driven [252,253]: This type of technology offers other advantages over the previously mentioned technology, such as greater precision in position control. Specifically, this type of technology can be associated with a structure made up of rigid or soft materials that are passively acted upon by tendons that offer soft-type manipulation.
- FEA-tendon-driven [254]: This approach combines both of the above technologies. Tendon drive technology is used for grasping motions, and actuation is achieved by linear soft vacuum actuators. This type of synergy improves the diversity of objects that can be manipulated, as well as the combination of the advantages of each technology. In one particular case [254], the gripper was able to lift a total of 2.7 kg, which represents a maximum payload-to-weight ratio of 7.06.
- Topology-optimized soft grippers [255]: This type of soft gripper, which operates via elastic deformation, can be adapted to the sizes and shapes of objects without mechanical joints or sensors. In one particular case, the gripper could lift maximum loads of 1.4 kg.
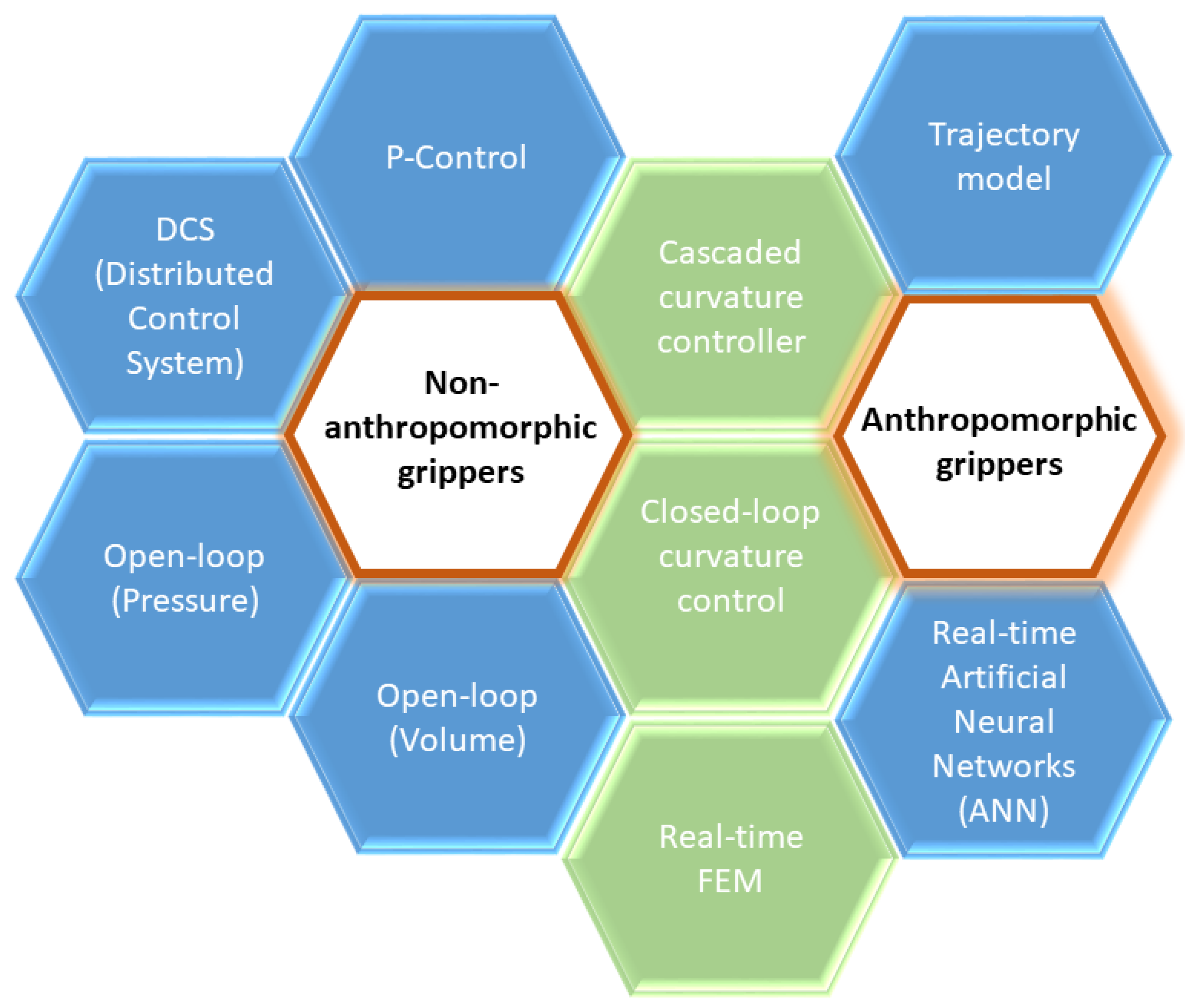
3.3. Control
4. Challenges of Soft Grippers for Robotic Crop Harvesting
- Design process: One of the main challenges of soft technology is the design process. A wide diversity of generalist soft grippers can be found in the current state of the art. However, these designs are more focused on achieving new improvements in the field of soft robotics than on developing a specific gripper that solves the issues of the particular field of applications. In terms of robotic crop harvesting, characteristics such as modularity, ease of repair, and the ability to handle food and multiple crops are desired. Apart from this, another gap that needs to be studied is the mathematical model that represents the behaviour of the material in FEM software. This is directly related to the nature of the various materials used, described in the Materials Subsection.
- Repeatability: Another of the main challenges of soft robotics, particular soft grippers, is the need to standardize manufacturing processes. This is the first point to be addressed because it would ensure that the designed soft actuators are suitable for production, facilitating their incorporation into the robotic market. Repeatability studies should research how to mitigate the common effects that appear in soft actuators, such as delamination or interstitial bubbles, that can be the result of faulty manufacturing. To solve these problems, several solutions have been proposed, such as the use of vacuum chambers [227,263,264,265]. Although positive results from this process have been reported, it is impossible to find a method where, for example, variables such as pressure or time are controlled as a function of volume to ensure the repeatability of the process. Obviously, the method would depend on the material used. On the other hand, in most cases, the manufacturing processes are very handmade, and therefore, repeatability can be compromised. However, processes based on 3D printing of soft materials, as well as lost wax manufacturing, may become interesting options in the future, given their greater options for achieving repeatability during the manufacturing process.
- Standard method for determination of soft actuator characteristics: One of the main gaps that has not yet been addressed in soft actuators is the definition of a method to determine their characteristics. However, it is clear that there is a need for a reliable method that can quantify the soft actuator features to facilitate its evaluation and comparison. Properties such as the contact pressure, contact force, contact area and slip force are crucial for benchmarking and determining room for improvement in this field. Thus, this would not only be useful for selecting the optimal option for each process but also for providing a true picture of the progress of this technology.In the current state of the art, several approaches can be found for the characterization of soft actuators, in which the experimental measurement is always performed with non-standardized objects. However, the proposed methodologies of the studies differ, presenting various approaches, among which the following stand out.
- –
- –
- Others, such as [218], use a pressure-mapping sensor to obtain the contact force and the pressure. This method offers a reliable measurement for grasping a static object. Grip strength is measured in a similar way to that in the studies mentioned above.
- –
- In [230], a payload test is presented to obtain the grip strength. Furthermore, the contact pressure is determined by means of FEM software. This last method can give inaccurate solutions due to its dependence on the mathematical model of the material used.
- –
- Finally, in [266], a deep and detailed analysis is proposed for the measurement of parameters such as grabbing height, pressure and motion acceleration for a soft actuator. In this case, the tests are carried out not only in static but also in dynamic conditions, differentiating between vertical and horizontal positions. Variables such as size, weight and constituent material are also taken into account, as well as the actuation pressure and the grabbing height. Finally, one of the main contributions of this study is the introduction of the handling ratio, which offers a measurable performance comparison.
- Design of control systems: Most of the soft grippers that have been proposed use open loop control. All of these grippers also have a low-cost goal associated with them. However, this results in impractical soft grippers that are difficult to implement in the agricultural environment. Their lack of real control of the deformation and compliance can affect the handling of fruits in different stages of maturity without damaging them. Thus, the study of new control algorithms that take into account the stiffness of the object to be manipulated is essential for the implementation of soft technology in robotic crop harvesting.
- Improvement of energy source systems: Depending on the type of soft actuator used, the energy support required for the gripper can be an electrical source, a pump or air compressor, or a chemical source. In any of these cases, more efficient equipment must be developed to support these technologies. In the literature, descriptions of energy solutions that drive soft-design systems are scarce. Typically, the proposed solutions are suitable for a laboratory or industrial environment, which is far from the unstructured environments of the agricultural sector. Therefore, the development of new energy solutions must be a compromise between functionality and energy consumption. In addition, the optimisation of the system is necessary not only to increase the autonomy of the overall robotic harvester, but also to simplify it, with the aim of enabling its implementation in current agricultural robotics.
- Economic analysis: Economic studies are often the necessary driving force to incentivize research and development in a given area. In the field of Agriculture 4.0, these economic studies can provide information on the most viable way to harvest different crops. However, at present, there is a need for economic research in this field. A study published in 2019 [267] highlights that only 18 investigations in the literature are dedicated to estimating the profitability of crop automation. This affects not only soft robotics but also other automation technologies, hindering its growth in this sector. However, although the lack of research in this direction is noteworthy, it is clear that in certain crops, such as tomatoes and peppers, the labour cost at harvest time represents 30% of the total cost [268,269]. Thus, mechanical harvesting by using soft grippers may be an economically beneficial alternative to manual harvesting [270].
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- UN DESA. United Nations Department of Economic and Social Affairs, Population Division. World Population Prospects: The 2015 Revision, Key Findings and Advance Tables; Technical Report; Working Paper No. ESA/P/WP. 241; UN DESA: New York, NY, USA, 2015. [Google Scholar]
- Vu, Q.; Kuzov, M.; Ronzhin, A. Hierarchical classification of robotic grippers applied for agricultural object manipulations. In Proceedings of the MATEC Web of Conferences, Samara, Russia, 26–27 November 2018; Volume 161, p. 03015. [Google Scholar]
- Gonzalez-de Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field Robots for Intelligent Farms—Inhering Features from Industry. Agronomy 2020, 10, 1638. [Google Scholar] [CrossRef]
- Ito, Y.; Nakano, T. Development and regulation of pedicel abscission in tomato. Front. Plant Sci. 2015, 6, 442. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zahara, M.; Scheuerman, R. Hand-harvesting jointless vs. jointed-stem tomatoes. Calif. Agric. 1988, 42, 14. [Google Scholar]
- Font, D.; Pallejà, T.; Tresanchez, M.; Runcan, D.; Moreno, J.; Martínez, D.; Teixidó, M.; Palacín, J. A proposal for automatic fruit harvesting by combining a low cost stereovision camera and a robotic arm. Sensors 2014, 14, 11557–11579. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mehta, S.; Burks, T. Vision-based control of robotic manipulator for citrus harvesting. Comput. Electron. Agric. 2014, 102, 146–158. [Google Scholar] [CrossRef]
- Cubero, S.; Diago, M.P.; Blasco, J.; Tardáguila, J.; Millán, B.; Aleixos, N. A new method for pedicel/peduncle detection and size assessment of grapevine berries and other fruits by image analysis. Biosyst. Eng. 2014, 117, 62–72. [Google Scholar] [CrossRef] [Green Version]
- Salinas, C.; Fernández, R.; Montes, H.; Armada, M. A New Approach for Combining Time-of-Flight and RGB Cameras Based on Depth-Dependent Planar Projective Transformations. Sensors 2015, 15, 24615–24643. [Google Scholar] [CrossRef] [Green Version]
- Sepúlveda, D.; Fernández, R.; Navas, E.; González-de Santos, P.; Armada, M. ROS Framework for Perception and Dual-Arm Manipulation in Unstructured Environments. In Proceedings of the Iberian Robotics Conference, Porto, Portuga, 20–22 November 2019; pp. 137–147. [Google Scholar]
- Tabile, R.A.; Godoy, E.P.; Pereira, R.R.; Tangerino, G.T.; Porto, A.J.; Inamasu, R.Y. Design and development of the architecture of an agricultural mobile robot. Eng. Agric. 2011, 31, 130–142. [Google Scholar] [CrossRef]
- Agostini, A.; Alenya, G.; Fischbach, A.; Scharr, H.; Woergoetter, F.; Torras, C. A cognitive architecture for automatic gardening. Comput. Electron. Agric. 2017, 138, 69–79. [Google Scholar] [CrossRef] [Green Version]
- Zion, B.; Mann, M.; Levin, D.; Shilo, A.; Rubinstein, D.; Shmulevich, I. Harvest-order planning for a multiarm robotic harvester. Comput. Electron. Agric. 2014, 103, 75–81. [Google Scholar] [CrossRef]
- Fernández, R.; Montes, H.; Salinas, C. VIS-NIR, SWIR and LWIR Imagery for Estimation of Ground Bearing Capacity. Sensors 2015, 15, 13994–14015. [Google Scholar] [CrossRef] [Green Version]
- Masuzawa, H.; Miura, J.; Oishi, S. Development of a mobile robot for harvest support in greenhouse horticulture—Person following and mapping. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 541–546. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Grimstad, L.; From, P.J. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation. J. Field Robot. 2019, 37, 202–224. [Google Scholar] [CrossRef] [Green Version]
- Hua, Y.; Zhang, N.; Yuan, X.; Quan, L.; Yang, J.; Nagasaka, K.; Zhou, X.G. Recent Advances in Intelligent Automated Fruit Harvesting Robots. Open Agric. J. 2019, 13, 101–106. [Google Scholar] [CrossRef] [Green Version]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de Santos, P. Modular dual-arm robot for precision harvesting. In Proceedings of the Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019; pp. 148–158. [Google Scholar]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Ozawa, R.; Tahara, K. Grasp and dexterous manipulation of multi-fingered robotic hands: A review from a control view point. Adv. Robot. 2017, 31, 1030–1050. [Google Scholar] [CrossRef]
- King, J.P.; Bauer, D.; Schlagenhauf, C.; Chang, K.H.; Moro, D.; Pollard, N.; Coros, S. Design. fabrication, and evaluation of tendon-driven multi-fingered foam hands. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 1–9. [Google Scholar]
- Mizushima, K.; Oku, T.; Suzuki, Y.; Tsuji, T.; Watanabe, T. Multi-fingered robotic hand based on hybrid mechanism of tendon-driven and jamming transition. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 376–381. [Google Scholar]
- Vulliez, P.; Gazeau, J.P.; Laguillaumie, P.; Mnyusiwalla, H.; Seguin, P. Focus on the mechatronics design of a new dexterous robotic hand for inside hand manipulation. Robotica 2018, 36, 1206–1224. [Google Scholar] [CrossRef]
- Blanes, C.; Mellado, M.; Ortiz, C.; Valera, A. Technologies for robot grippers in pick and place operations for fresh fruits and vegetables. Span. J. Agric. Res. 2011, 9, 1130–1141. [Google Scholar] [CrossRef]
- Morales, R.; Badesa, F.; Garcia-Aracil, N.; Sabater, J.; Zollo, L. Soft robotic manipulation of onions and artichokes in the food industry. Adv. Mech. Eng. 2014, 6, 345291. [Google Scholar] [CrossRef]
- Chu, C.Y.; Patterson, R.M. Soft robotic devices for hand rehabilitation and assistance: A narrative review. J. Neuroeng. Rehabil. 2018, 15, 9. [Google Scholar] [CrossRef] [Green Version]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Awad, L.N.; Bae, J.; O’donnell, K.; De Rossi, S.M.; Hendron, K.; Sloot, L.H.; Kudzia, P.; Allen, S.; Holt, K.G.; Ellis, T.D. A soft robotic exosuit improves walking in patients after stroke. Sci. Transl. Med. 2017, 9, eaai9084. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roche, E.T.; Horvath, M.A.; Wamala, I.; Alazmani, A.; Song, S.E.; Whyte, W.; Machaidze, Z.; Payne, C.J.; Weaver, J.C.; Fishbein, G. Soft robotic sleeve supports heart function. Sci. Transl. Med. 2017, 9, eaaf3925. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Díaz, C.E.; Fernández, R.; Armada, M.; Gutiérrez, F.d.J.G. State of the art in robots used in minimally invasive surgeries. Natural orifice transluminal surgery (NOTES) as a particular case. Ind. Robot. Int. J. 2015, 42, 508–532. [Google Scholar] [CrossRef]
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft robotics: Review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction. Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar] [CrossRef]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft robot review. Int. J. Control. Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Sanders, K. Orange harvesting systems review. Biosyst. Eng. 2005, 90, 115–125. [Google Scholar] [CrossRef]
- Li, P.; Lee, S.h.; Hsu, H.Y. Review on fruit harvesting method for potential use of automatic fruit harvesting systems. Procedia Eng. 2011, 23, 351–366. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, A.K.; Goering, C.E.; Rohrbach, R.P.; Buckmaster, D.R. Engineering Principles of Agricultural Machines; ASABE: St. Joseph, MI, USA, 1993. [Google Scholar]
- Nasini, L.; Proietti, P. Olive harvesting. In The Extra-Virgin Olive Oil Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2014; pp. 87–105. [Google Scholar]
- Polat, R.; Guner, M.; Dursun, E.; Erdogan, D.; Gezer, I.; Bilim, H.C. Mechanical harvesting of almond with an inertia type limb shaker. Asian J. Plant Sci. 2007, 6, 528–532. [Google Scholar] [CrossRef] [Green Version]
- Polat, R.; Gezer, I.; Guner, M.; Dursun, E.; Erdogan, D.; Bilim, H.C. Mechanical harvesting of pistachio nuts. J. Food Eng. 2007, 79, 1131–1135. [Google Scholar] [CrossRef]
- Dimeas, F.; Sako, D.V.; Moulianitis, V.C.; Aspragathos, N.A. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotica 2015, 33, 1085–1098. [Google Scholar] [CrossRef]
- Hayashi, S.; Shigematsu, K.; Yamamoto, S.; Kobayashi, K.; Kohno, Y.; Kamata, J.; Kurita, M. Evaluation of a strawberry-harvesting robot in a field test. Biosyst. Eng. 2010, 105, 160–171. [Google Scholar] [CrossRef]
- De-An, Z.; Jidong, L.; Wei, J.; Ying, Z.; Yu, C. Design and control of an apple harvesting robot. Biosyst. Eng. 2011, 110, 112–122. [Google Scholar] [CrossRef]
- Baeten, J.; Donné, K.; Boedrij, S.; Beckers, W.; Claesen, E. Autonomous fruit picking machine: A robotic apple harvester. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 531–539. [Google Scholar]
- Li, J.; Karkee, M.; Zhang, Q.; Xiao, K.; Feng, T. Characterizing apple picking patterns for robotic harvesting. Comput. Electron. Agric. 2016, 127, 633–640. [Google Scholar] [CrossRef] [Green Version]
- Davidson, J.R.; Silwal, A.; Hohimer, C.J.; Karkee, M.; Mo, C.; Zhang, Q. Proof-of-concept of a robotic apple harvester. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 634–639. [Google Scholar]
- Monta, M.; Kondo, N.; Ting, K.C. End-effectors for tomato harvesting robot. In Artificial Intelligence for Biology and Agriculture; Springer: Berlin/Heidelberg, Germany, 1998; pp. 1–25. [Google Scholar]
- Yaguchi, H.; Nagahama, K.; Hasegawa, T.; Inaba, M. Development of an autonomous tomato harvesting robot with rotational plucking gripper. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 652–657. [Google Scholar]
- Li, Z.; Li, P.; Yang, H.; Wang, Y. Stability tests of two-finger tomato grasping for harvesting robots. Biosyst. Eng. 2013, 116, 163–170. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, L.; Liu, C.; Huang, Y. Dual-arm robot design and testing for harvesting tomato in greenhouse. IFAC PapersOnLine 2016, 49, 161–165. [Google Scholar] [CrossRef]
- Hayashi, S.; Ganno, K.; Ishii, Y.; Tanaka, I. Robotic harvesting system for eggplants. Jpn. Agric. Res. Q. 2002, 36, 163–168. [Google Scholar] [CrossRef] [Green Version]
- SepúLveda, D.; Fernández, R.; Navas, E.; Armada, M.; González-De-Santos, P. Robotic aubergine harvesting using dual-arm manipulation. IEEE Access 2020, 8, 121889–121904. [Google Scholar] [CrossRef]
- Edan, Y.; Rogozin, D.; Flash, T.; Miles, G.E. Robotic melon harvesting. IEEE Trans. Robot. Autom. 2000, 16, 831–835. [Google Scholar] [CrossRef]
- Muscato, G.; Prestifilippo, M.; Abbate, N.; Rizzuto, I. A prototype of an orange picking robot: Past history, the new robot and experimental results. Ind. Robot. Int. J. 2005, 32, 128–138. [Google Scholar] [CrossRef]
- Van Henten, E.J.; Hemming, J.; Van Tuijl, B.; Kornet, J.; Meuleman, J.; Bontsema, J.; Van Os, E. An autonomous robot for harvesting cucumbers in greenhouses. Auton. Robot. 2002, 13, 241–258. [Google Scholar] [CrossRef]
- Hemming, J.; Bac, C.; Van Tuijl, B.; Barth, R.; Bontsema, J.; Pekkeriet, E.; Van Henten, E. A robot for harvesting sweet-pepper in greenhouses. In Proceedings of the International Conference of Agricultural Engineering, Zurich, Switzerland, 6–10 July 2014. [Google Scholar]
- Bac, C.W.; Hemming, J.; Van Tuijl, B.; Barth, R.; Wais, E.; Van Henten, E.J. Performance evaluation of a harvesting robot for sweet pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Lehnert, C.; English, A.; McCool, C.; Tow, A.W.; Perez, T. Autonomous sweet pepper harvesting for protected cropping systems. IEEE Robot. Autom. Lett. 2017, 2, 872–879. [Google Scholar] [CrossRef] [Green Version]
- Tong, J.; Zhang, Q.; Karkee, M.; Jiang, H.; Zhou, J. Understanding the dynamics of hand picking patterns of fresh market apples. In Proceedings of the 2014 Montreal, Quebec, QC, Canada, 13–16 July 2014; p. 1. [Google Scholar]
- Moreno, R.; Torregrosa, A.; Molto, E.; Chueca, P. Effect of harvesting with a trunk shaker and an abscission chemical on fruit detachment and defoliation of citrus grown under Mediterranean conditions. Span. J. Agric. Res. 2015, 13, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Sarig, Y. Robotics of fruit harvesting: A state-of-the-art review. J. Agric. Eng. Res. 1993, 54, 265–280. [Google Scholar] [CrossRef]
- Bulanon, D.M.; Kataoka, T. Fruit detection system and an end effector for robotic harvesting of Fuji apples. Agric. Eng. Int. CIGR J. 2010, 12, 203–210. [Google Scholar]
- Mao, L.; Begum, D.; Chuang, H.w.; Budiman, M.A.; Szymkowiak, E.J.; Irish, E.E.; Wing, R.A. JOINTLESS is a MADS-box gene controlling tomato flower abscissionzone development. Nature 2000, 406, 910–913. [Google Scholar] [CrossRef]
- Erkan, M.; Dogan, A. Harvesting of horticultural commodities. In Postharvest Technology of Perishable Horticultural Commodities; Elsevier: Amsterdam, The Netherlands, 2019; pp. 129–159. [Google Scholar]
- Chen, X.; Chaudhary, K.; Tanaka, Y.; Nagahama, K.; Yaguchi, H.; Okada, K.; Inaba, M. Reasoning-based vision recognition for agricultural humanoid robot toward tomato harvesting. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 6487–6494. [Google Scholar]
- Mu, L.; Cui, G.; Liu, Y.; Cui, Y.; Fu, L.; Gejima, Y. Design and simulation of an integrated end-effector for picking kiwifruit by robot. Inf. Process. Agric. 2020, 7, 58–71. [Google Scholar] [CrossRef]
- De Preter, A.; Anthonis, J.; De Baerdemaeker, J. Development of a robot for harvesting strawberries. IFAC PapersOnLine 2018, 51, 14–19. [Google Scholar] [CrossRef]
- Huang, Z.; Sklar, E.; Parsons, S. Design of Automatic Strawberry Harvest Robot Suitable in Complex Environments. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 567–569. [Google Scholar]
- Li, Z.; Miao, F.; Yang, Z.; Wang, H. An anthropometric study for the anthropomorphic design of tomato-harvesting robots. Comput. Electron. Agric. 2019, 163, 104881. [Google Scholar] [CrossRef]
- Prasad, J.; Gupta, C. Mechanical properties of maize stalk as related to harvesting. J. Agric. Eng. Res. 1975, 20, 79–87. [Google Scholar] [CrossRef]
- Kronbergs, E. Mechanical strength testing of stalk materials and compacting energy evaluation. Ind. Crop. Prod. 2000, 11, 211–216. [Google Scholar] [CrossRef]
- Yu, M.; Womac, A.; Igathinathane, C.; Ayers, P.; Buschermohle, M. Switchgrass ultimate stresses at typical biomass conditions available for processing. Biomass Bioenergy 2006, 30, 214–219. [Google Scholar] [CrossRef]
- Tavakoli, H.; Mohtasebi, S.; Jafari, A. Comparison of mechanical properties of wheat and barley straw. Agric. Eng. Int. CIGR J. 2008, 10, 1–9. [Google Scholar]
- Mou, X.; Liu, Q.; Ou, Y.; Wang, M.; Song, J. Mechanical properties of the leaf sheath of sugarcane. Trans. ASABE 2013, 56, 801–812. [Google Scholar]
- Yu, M.; Cannayen, I.; Hendrickson, J.; Sanderson, M.; Liebig, M. Mechanical shear and tensile properties of selected biomass stems. Trans. ASABE 2014, 57, 1231–1242. [Google Scholar]
- Navas, E.; Fernandez, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de Santos, P. A Design Criterion Based on Shear Energy Consumption for Robotic Harvesting Tools. Agronomy 2020, 10, 734. [Google Scholar] [CrossRef]
- Liu, J.; Li, Z.; Li, P.; Mao, H. Design of a laser stem-cutting device for harvesting robot. In Proceedings of the 2008 IEEE International Conference on Automation and Logistics, Qingdao, China, 1–3 September 2008; pp. 2370–2374. [Google Scholar]
- Jia, B.; Zhu, A.; Yang, S.X.; Mittal, G.S. Integrated gripper and cutter in a mobile robotic system for harvesting greenhouse products. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1778–1783. [Google Scholar]
- Ceccarelli, M.; Figliolini, G.; Ottaviano, E.; Mata, A.S.; Criado, E.J. Designing a robotic gripper for harvesting horticulture products. Robotica 2000, 18, 105–111. [Google Scholar] [CrossRef] [Green Version]
- Bachche, S.; Oka, K. Performance testing of thermal cutting systems for sweet pepper harvesting robot in greenhouse horticulture. J. Syst. Des. Dyn. 2013, 7, 36–51. [Google Scholar] [CrossRef] [Green Version]
- Chuncho, G.; Chuncho, C.; Aguirre, Z.H. Anatomía y Morfología Vegetal; University of Nebraska de Loja: Loja, Ecuador, 2019. [Google Scholar]
- Encyclopædia Britannica. 1993. Available online: https://www.britannica.com/ (accessed on 10 April 2021).
- Morris, W. American Heritage Dictionary of the English Language; American Heritage Pub. Co.: Rockville, MD, USA, 1969. [Google Scholar]
- FAO. Prevencion de Perdidas de Alimentos Poscosecha: Frutas, Hortalizas, Raices y Tuberculos. Manual de Capacitacion; FAO: Rome, Italy, 1993; Volume 2. [Google Scholar]
- Erdoǧan, D.; Güner, M.; Dursun, E.; Gezer, I. Mechanical harvesting of apricots. Biosyst. Eng. 2003, 85, 19–28. [Google Scholar] [CrossRef]
- Mira, A.T.; Chaparro, O.; Górriz, B.M.; Ortiz, C.; Bernad, J.; Ortí, E.; Gil, J.; Pérez, M. Design, construction and testing of an apricot tractor-trailed harvester. Span. J. Agric. Res. 2008, 3, 333–340. [Google Scholar]
- Crandall, P.C. Bramble Production: The Management and Marketing of Raspberries and Blackberries; CRC Press: Boca Raton, FL, USA, 1995. [Google Scholar]
- Santinato, F.; SILVA, R.P.D.; Silva, V.D.A.; SILVA, C.D.D.; Tavares, T.D.O. Mechanical harvesting of coffee in high slope. Rev. Caatinga 2016, 29, 685–691. [Google Scholar] [CrossRef] [Green Version]
- Aristizábal, I.; Oliveros, C.; Alvarez, F. Mechanical harvest of coffee applying circular and multidirectional vibrations. In Proceedings of the 2000 ASAE Annual International Meeting, Milwaukee, WI, USA, 9–12 July 2000; pp. 1–14. [Google Scholar]
- Halderson, J.L. Fundamental factors in mechanical cherry harvesting. Trans. ASAE 1966, 9, 681–0684. [Google Scholar] [CrossRef]
- Norton, R.; Claypool, L.; Leonard, S.; Adrian, P.; Fridley, R.; Charles, F. Mechanical harvesting of sweet cherries: 1961 tests show promise and problems. Calif. Agric. 1962, 16, 8–10. [Google Scholar]
- Peterson, D.; Wolford, S. Mechanical harvester for fresh market quality stemless sweet cherries. Trans. ASAE 2001, 44, 481. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; He, L.; Du, X.; Chen, D.; Zhang, Q.; Karkee, M. Dynamic response of sweet cherry tree to the vibration of a limb shaker. In Proceedings of the American Society of Agricultural and Biological Engineers, Dallas, TX, USA, 29 July–1 August 2012; p. 1. [Google Scholar]
- Chen, D.; Du, X.; Zhang, Q.; Whiting, M.; Scharf, P.; Wang, S. Performance evaluation of mechanical cherry harvesters for fresh market grade fruits. Appl. Eng. Agric. 2012, 28, 483–489. [Google Scholar] [CrossRef]
- Zhou, J.; He, L.; Zhang, Q.; Du, X.; Chen, D.; Karkee, M. Evaluation of the influence of shaking frequency and duration in mechanical harvesting of sweet cherry. Appl. Eng. Agric. 2013, 29, 607–612. [Google Scholar]
- He, L.; Zhou, J.; Du, X.; Chen, D.; Zhang, Q.; Karkee, M. Energy efficacy analysis of a mechanical shaker in sweet cherry harvesting. Biosyst. Eng. 2013, 116, 309–315. [Google Scholar] [CrossRef]
- Tanigaki, K.; Fujiura, T.; Akase, A.; Imagawa, J. Cherry-harvesting robot. Comput. Electron. Agric. 2008, 63, 65–72. [Google Scholar] [CrossRef]
- Amatya, S.; Karkee, M.; Zhang, Q.; Whiting, M.D. Automated detection of branch shaking locations for robotic cherry harvesting using machine vision. Robotics 2017, 6, 31. [Google Scholar] [CrossRef] [Green Version]
- Dubey, A.P.; Pattnaik, S.M.; Banerjee, A.; Sarkar, R.; Kumar, S. Autonomous control and implementation of coconut tree climbing and harvesting robot. Procedia Comput. Sci. 2016, 85, 755–766. [Google Scholar] [CrossRef] [Green Version]
- CCS, M.S.G.; Srinath, P.; Karthikeyan, P. Automatic Coconut Harvesting System. J. Adv. Res. Embed. Syst. 2018, 5, 1–7. [Google Scholar]
- He, Z.L.; Xiong, J.T.; Lin, R.; Zou, X.; Tang, L.Y.; Yang, Z.G.; Liu, Z.; Song, G. A method of green litchi recognition in natural environment based on improved LDA classifier. Comput. Electron. Agric. 2017, 140, 159–167. [Google Scholar] [CrossRef]
- Xiong, J.; Lin, R.; Liu, Z.; He, Z.; Tang, L.; Yang, Z.; Zou, X. The recognition of litchi clusters and the calculation of picking point in a nocturnal natural environment. Biosyst. Eng. 2018, 166, 44–57. [Google Scholar] [CrossRef]
- Guo, Q.; Chen, Y.; Tang, Y.; Zhuang, J.; He, Y.; Hou, C.; Chu, X.; Zhong, Z.; Luo, S. Lychee fruit detection based on monocular machine vision in orchard environment. Sensors 2019, 19, 4091. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; Tang, Y.; Zou, X.; Lin, G.; Wang, H. Detection of Fruit-bearing Branches and Localization of Litchi Clusters for Vision-based Harvesting Robots. IEEE Access 2020, 8, 117746–117758. [Google Scholar] [CrossRef]
- Parameswarakumar, M.; Gupta, C.P. Design parameters for vibratory mango harvesting system. Trans. ASAE 1991, 34, 14–20. [Google Scholar] [CrossRef]
- Hao, H.; Yan, Z.; Dong, L. Design of Mango Picking Machine. J. Anhui Agric. Sci. 2012, 40, 590–591. [Google Scholar]
- Jiuxin, L.; Yan, Z.; Yulan, L.; Dong, L. Research Control System of Mango Picking Machine Based on the PLC. J. Agric. Mech. Res. 2012, 34, 187–189. [Google Scholar]
- Lian, X.W.; Liang, D.; Zhang, Y. The Design Based on the Hydraulic Control of the Mango Picking Machine; Advanced Materials Research; Trans Tech Publications: Bäch, Switzerland, 2012; Volume 479, pp. 1468–1475. [Google Scholar]
- Konam, S. Agricultural aid for mango cutting (AAM). In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; pp. 1520–1524. [Google Scholar]
- Stein, M.; Bargoti, S.; Underwood, J. Image based mango fruit detection, localisation and yield estimation using multiple view geometry. Sensors 2016, 16, 1915. [Google Scholar] [CrossRef]
- Font, D.; Tresanchez, M.; Pallejà, T.; Teixidó, M.; Martinez, D.; Moreno, J.; Palacín, J. An image processing method for in-line nectarine variety verification based on the comparison of skin feature histogram vectors. Comput. Electron. Agric. 2014, 102, 112–119. [Google Scholar] [CrossRef]
- Antognozzi, E.; Cartechini, A.; Tombesi, A.; Proietti, P. Effect of cultivar and vibration characteristics on mechanical harvesting of olives. Int. Symp. Olive Grow. 1989, 286, 417–420. [Google Scholar] [CrossRef]
- Antognozzi, E.; Cartechini, A.; Tombesi, A.; Palliotti, A. Transmission and efficiency of vibrations on ‘Moraiolo’olive harvesting. Int. Symp. Olive Grow. 1989, 286, 413–416. [Google Scholar]
- Martin, G.C. Mechanical olive harvest: Use of fruit loosening agents. II Int. Symp. Olive Grow. 1993, 356, 284–291. [Google Scholar] [CrossRef]
- Bentaher, H.; Rouina, B.B. Mechanical harvesting of "Chemlali de Sfax" olive-trees. IV Int. Symp. Olive Grow. 2000, 586, 365–368. [Google Scholar]
- Sessiz, A.; Özcan, M. Olive removal with pneumatic branch shaker and abscission chemical. J. Food Eng. 2006, 76, 148–153. [Google Scholar] [CrossRef]
- Torregrosa, A.; Martín, B.; Brunton, J.G.; Bernad, J. Mechanical harvesting of processed peaches. Appl. Eng. Agric. 2008, 24, 723–729. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, B.; Qiao, J. Development of a machine vision algorithm for recognition of peach fruit in a natural scene. Trans. ASABE 2011, 54, 695–702. [Google Scholar] [CrossRef]
- Alosaimi, W.; Alyami, H.; Uddin, M.I. PeachNet: Peach Diseases Detection for Automatic Harvesting. Comput. Mater. Contin. 2021, 67, 1665–1677. [Google Scholar] [CrossRef]
- Brown, J.; Sukkarieh, S. Design and evaluation of a modular robotic plum harvesting system utilizing soft components. J. Field Robot. 2021, 38, 289–306. [Google Scholar] [CrossRef]
- Patzlaff, A.W. Beater Assembly for Raspberry Harvester. U.S. Patent 3,611,689, 12 October 1971. [Google Scholar]
- Patzlaff, A.W. Raspberry Harvester. U.S. Patent 3,703,072, 21 November 1972. [Google Scholar]
- Vasconez, J.P.; Guevara, L.; Cheein, F.A. Social robot navigation based on HRI non-verbal communication: A case study on avocado harvesting. In Proceedings of the 34th ACM/SIGAPP Symposium on Applied Computing, Limassol, Cyprus, 8–12 April 2019; pp. 957–960. [Google Scholar]
- Richard, P. Development of a Mechanical Harvester for Lowbush Blueberries; ESRI: Redlands, CA, USA, 1982. [Google Scholar]
- Saito, Y.; Hatanaka, T.; Uosaki, K.; Shigeto, K. Eggplant classification using artificial neural network. In Proceedings of the International Joint Conference on Neural Networks, Portland, OR, USA, 20–24 July 2003; Volume 2, pp. 1013–1018. [Google Scholar]
- Shaulis, N.; Shepardson, E.S.; Jordan, T.D. Geneva Double Curtain for Concord Grapes; New York State Agricultural Experiment Station: Geneva, NY, USA, 1966. [Google Scholar]
- Shepardson, E.; Shaulis, N.; Moyer, J. Mechanical harvesting of grape varieties grown in New York State. In Fruit and Vegetable Harvest Mechanization: Technological Implications; Cargill, B.F., Rossmiller, G.E., Eds.; Rural Manpower Center, Michigan Sate University: East Lansing, MI, USA, 1969; pp. 571–577. [Google Scholar]
- Studer, H.; Olmo, H. Mechanical harvesting of grapes in California: Cultural practices and machines. In Fruit and Vegetable Harvest Mechanization: Technological Implications; Cargill, B.T., Rossmiller, G.E., Eds.; Michigan State University: East Lansing, MI, USA, 1969; pp. 611–621. [Google Scholar]
- Pezzi, F.; Caprara, C. Mechanical grape harvesting: Investigation of the transmission of vibrations. Biosyst. Eng. 2009, 103, 281–286. [Google Scholar] [CrossRef]
- Monta, M.; Kondo, N.; Shibano, Y. Agricultural robot in grape production system. Proceedings of 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 3, pp. 2504–2509. [Google Scholar]
- Luo, L.; Tang, Y.; Zou, X.; Wang, C.; Zhang, P.; Feng, W. Robust grape cluster detection in a vineyard by combining the AdaBoost framework and multiple color components. Sensors 2016, 16, 2098. [Google Scholar] [CrossRef] [PubMed]
- Lin, G.; Tang, Y.; Zou, X.; Xiong, J.; Li, J. Guava detection and pose estimation using a low-cost RGB-D sensor in the field. Sensors 2019, 19, 428. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Wang, H.; Jiang, H.; Gao, H.; Lei, W.; Dang, G. Design of end-effector for kiwifruit harvesting robot. Trans. Chin. Soc. Agric. Mach. 2012, 43, 151–199. [Google Scholar]
- Mu, L.; Liu, Y.; Cui, Y.; Liu, H.; Chen, L.; Fu, L.; Gejima, Y. Design of end-effector for kiwifruit harvesting robot experiment. In Proceedings of the 2017 ASABE Annual International Meeting, American Society of Agricultural and Biological Engineers, Spokane, WA, USA, 16–19 July 2017; p. 1. [Google Scholar]
- Williams, H.A.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- BAI, Z.y.; ZHANG, Y. Research on Picking Machine of Papaya. Hubei Agric. Sci. 2015, 2015, 59. [Google Scholar]
- Tu, S.; Xue, Y.; Zheng, C.; Qi, Y.; Wan, H.; Mao, L. Detection of passion fruits and maturity classification using Red-Green-Blue Depth images. Biosyst. Eng. 2018, 175, 156–167. [Google Scholar] [CrossRef]
- Kitamura, S.; Oka, K. Recognition and cutting system of sweet pepper for picking robot in greenhouse horticulture. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; Volume 4, pp. 1807–1812. [Google Scholar]
- Bac, C.W. Improving Obstacle Awareness for Robotic Harvesting of Sweet-Pepper; Wageningen University: Wageningen, The Netherlands, 2015. [Google Scholar]
- Arad, B.; Balendonck, J.; Barth, R.; Ben-Shahar, O.; Edan, Y.; Hellström, T.; Hemming, J.; Kurtser, P.; Ringdahl, O.; Tielen, T.; et al. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Vitzrabin, E.; Edan, Y. Adaptive thresholding with fusion using a RGBD sensor for red sweet-pepper detection. Biosyst. Eng. 2016, 146, 45–56. [Google Scholar] [CrossRef]
- Sa, I.; Lehnert, C.; English, A.; McCool, C.; Dayoub, F.; Upcroft, B.; Perez, T. Peduncle detection of sweet pepper for autonomous crop harvesting—Combined color and 3-D information. IEEE Robot. Autom. Lett. 2017, 2, 765–772. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Park, S.; Kim, C.; Kim, M.; Lee, C.; Jy, R. Development of a Persimmon Harvesting System. In Proceedings of the Korean Society for Agricultural Machinery Conference. Korean Society for Agricultural Machinery, Seoul, Korea, 19–22 October 2000; pp. 472–479. [Google Scholar]
- Mohammadi, V.; Kheiralipour, K.; Ghasemi-Varnamkhasti, M. Detecting maturity of persimmon fruit based on image processing technique. Sci. Hortic. 2015, 184, 123–128. [Google Scholar] [CrossRef]
- Li, X.; Qin, Y.; Wang, F.; Guo, F.; Yeow, J.T. Pitaya detection in orchards using the MobileNet-YOLO model. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 6274–6278. [Google Scholar]
- Jafari, A.; Bakhshipour, A. A novel algorithm to recognize and locate pomegranate on the tree for a harvesting robot using a stereo vision system. In Proceedings of the Precision Agriculture; ResearchGate: Berlin, Germany, 2011. [Google Scholar]
- Yeshmukhametov, A.; Koganezawa, K.; Buribayev, Z.; Amirgaliyev, Y.; Yamamoto, Y. Development of Continuum Robot Arm and Gripper for Harvesting Cherry Tomatoes. Preprints 2019. [Google Scholar] [CrossRef] [Green Version]
- Kondo, N.; Yata, K.; Iida, M.; Shiigi, T.; Monta, M.; Kurita, M.; Omori, H. Development of an end-effector for a tomato cluster harvesting robot. Eng. Agric. Environ. Food 2010, 3, 20–24. [Google Scholar] [CrossRef]
- Arefi, A.; Motlagh, A.M.; Mollazade, K.; Teimourlou, R.F. Recognition and localization of ripen tomato based on machine vision. Aust. J. Crop. Sci. 2011, 5, 1144–1149. [Google Scholar]
- Villaseñor-Aguilar, M.J.; Botello-Álvarez, J.E.; Pérez-Pinal, F.J.; Cano-Lara, M.; León-Galván, M.F.; Bravo-Sánchez, M.G.; Barranco-Gutierrez, A.I. Fuzzy classification of the maturity of the tomato using a vision system. J. Sens. 2019, 2019, 3175848. [Google Scholar] [CrossRef]
- Yuan, T.; Lv, L.; Zhang, F.; Fu, J.; Gao, J.; Zhang, J.; Li, W.; Zhang, C.; Zhang, W. Robust cherry tomatoes detection algorithm in greenhouse scene based on SSD. Agriculture 2020, 10, 160. [Google Scholar] [CrossRef]
- Qiang, L.; Liqin, Y.; Wei, A. The suitable working of wolfberry harvest machine. J. Agric. Mech. Res. 2009, 6, 126–128. [Google Scholar]
- Bing, Z.; Jing, H. Design of simulate hand wolfberry picking machine. Trans. Chin. Soc. Agric. Eng. 2011, 26, 13–17. [Google Scholar]
- Lvcheng, W.; Junmei, T.; Xiaopeng, W.; Tao, L. Wolfberry classification method based on machine vision. Comput. Eng. Appl. 2013, 2013, 24. [Google Scholar]
- Pellerin, R.; Millier, W.; Lakso, A.; Rehkugler, G.; Throop, J. Apple harvesting with an inertial vs. impulse trunk shaker on open-center and central-leader trees—Part II. Trans. ASAE 1979, 22, 983–988. [Google Scholar] [CrossRef]
- Davidson, J.R.; Hohimer, C.J.; Mo, C.; Karkee, M. Dual robot coordination for apple harvesting. In Proceedings of the 2017 ASABE Annual International Meeting. American Society of Agricultural and Biological Engineers, Spokane, WA, USA, 16–19 July 2017; p. 1. [Google Scholar]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Guoli, L.; Changying, J.; Baoxing, G.; Weiyue, X.; Mang, D. Kinematics analysis and experiment of apple harvesting robot manipulator with multiple end-effectors. Trans. Chin. Soc. Agric. Mach 2016, 47, 14–29. [Google Scholar]
- Ji, W.; Zhao, D.; Cheng, F.; Xu, B.; Zhang, Y.; Wang, J. Automatic recognition vision system guided for apple harvesting robot. Comput. Electr. Eng. 2012, 38, 1186–1195. [Google Scholar] [CrossRef]
- Kang, H.; Chen, C. Fast implementation of real-time fruit detection in apple orchards using deep learning. Comput. Electron. Agric. 2020, 168, 105108. [Google Scholar] [CrossRef]
- Ying, Y.; Jing, H.; Tao, Y.; Zhang, N. Detecting stem and shape of pears using Fourier transformation and an artificial neural network. Trans. ASAE 2003, 46, 157–162. [Google Scholar] [CrossRef]
- Fu, L.; Duan, J.; Zou, X.; Lin, G.; Song, S.; Ji, B.; Yang, Z. Banana detection based on color and texture features in the natural environment. Comput. Electron. Agric. 2019, 167, 105057. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, Q.; Xun, Y.; Chen, X.; Ren, Y.; Yuan, T.; Tan, Y.; Li, W. Recognition of greenhouse cucumber fruit using computer vision. N. Z. J. Agric. Res. 2007, 50, 1293–1298. [Google Scholar] [CrossRef]
- Fernandez, R.; Montes, H.; Surdilovic, J.; Surdilovic, D.; Gonzalez-De-Santos, P.; Armada, M. Automatic detection of field-grown cucumbers for robotic harvesting. IEEE Access 2018, 6, 35512–35527. [Google Scholar] [CrossRef]
- Gaffney, J.; Miller, W.; Coppock, G.E. Citrus Fruit Injury as Related to Mechanical Harvesting With Limb Shaker-Catch Frame Systems. Proc. Fla. State Hortic. Soc. 1976, 89, 179–182. [Google Scholar]
- Li, G.; Huang, X.; Ai, J.; Yi, Z.; Xie, W. Lemon-YOLO: An efficient object detection method for lemons in the natural environment. In IET Image Processing; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Peterson, D. Mechanical harvester for process oranges. Appl. Eng. Agric. 1998, 14, 455–458. [Google Scholar] [CrossRef]
- Whitney, J. Field test results with mechanical harvesting equipment in Florida oranges. Appl. Eng. Agric. 1999, 15, 205. [Google Scholar] [CrossRef]
- Ganesh, P.; Volle, K.; Burks, T.; Mehta, S. Deep orange: Mask R-CNN based orange detection and segmentation. IFAC PapersOnLine 2019, 52, 70–75. [Google Scholar] [CrossRef]
- Hannan, M.; Burks, T.; Bulanon, D.M. A machine vision algorithm combining adaptive segmentation and shape analysis for orange fruit detection. Agric. Eng. Int. CIGR J. 2010, XI, 1–17. [Google Scholar]
- Roshanianfard, A.; Noguchi, N. Pumpkin harvesting robotic end-effector. Comput. Electron. Agric. 2020, 174, 105503. [Google Scholar] [CrossRef]
- Wittstruck, L.; Kühling, I.; Trautz, D.; Kohlbrecher, M.; Jarmer, T. UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation. Sensors 2021, 21, 118. [Google Scholar] [CrossRef]
- Hwang, H.; Kim, S.C. Development of multi-functional tele-operative modular robotic system for greenhouse watermelon. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 2, pp. 1344–1349. [Google Scholar]
- Rajendra, P.; Kondo, N.; Ninomiya, K.; Kamata, J.; Kurita, M.; Shiigi, T.; Hayashi, S.; Yoshida, H.; Kohno, Y. Machine vision algorithm for robots to harvest strawberries in tabletop culture greenhouses. Eng. Agric. Environ. Food 2009, 2, 24–30. [Google Scholar] [CrossRef]
- Klaoudatos, D.S.; Moulianitis, V.C.; Aspragathos, N.A. Development of an Experimental Strawberry Harvesting Robotic System. In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics, Prague, Czech Republic, 26–29 July 2019; pp. 437–445. [Google Scholar]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Lamb, N.; Chuah, M.C. A strawberry detection system using convolutional neural networks. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 2515–2520. [Google Scholar]
- Wang, H.; Li, B.; Liu, G.; Xu, L. Design and test of pineapple harvesting manipulator. Trans. Chin. Soc. Agric. Eng. 2012, 28, 42–46. [Google Scholar]
- Anh, N.P.T.; Hoang, S.; Van Tai, D.; Quoc, B.L.C. Developing Robotic System for Harvesting Pineapples. In Proceedings of the 2020 International Conference on Advanced Mechatronic Systems (ICAMechS), Hanoi, Vietnam, 10–13 December 2020; pp. 39–44. [Google Scholar]
- Li, B.; Wang, M.; Wang, N. Development of a real-time fruit recognition system for pineapple harvesting robots. In Proceedings of the American Society of Agricultural and Biological Engineers, Pittsburgh, PA, USA, 20–23 June 2010; p. 1. [Google Scholar]
- Li, B.; Ning, W.; Wang, M.; Li, L. In-field pineapple recognition based on monocular vision. Trans. Chin. Soc. Agric. Eng. 2010, 26, 345–349. [Google Scholar]
- Li, B.; Wang, M. In-field recognition and navigation path extraction for pineapple harvesting robots. Intell. Autom. Soft Comput. 2013, 19, 99–107. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft manipulators and grippers: A review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef] [Green Version]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Majidi, C. Soft robotics: A perspective—current trends and prospects for the future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M. Soft robotics: New perspectives for robot bodyware and control. Front. Bioeng. Biotechnol. 2014, 2, 3. [Google Scholar] [CrossRef] [Green Version]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [Green Version]
- Boyraz, P.; Runge, G.; Raatz, A. An overview of novel actuators for soft robotics. Actuators 2018, 7, 48. [Google Scholar] [CrossRef] [Green Version]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [Green Version]
- D’Avella, S.; Tripicchio, P.; Avizzano, C.A. A study on picking objects in cluttered environments: Exploiting depth features for a custom low-cost universal jamming gripper. Robot.-Comput.-Integr. Manuf. 2020, 63, 101888. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Mengüç, Y.; Yang, S.Y.; Kim, S.; Rogers, J.A.; Sitti, M. Gecko-inspired controllable adhesive structures applied to micromanipulation. Adv. Funct. Mater. 2012, 22, 1246–1254. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Christensen, D.L.; Han, A.K.; Jiang, H.; Cutkosky, M.R. Grasping without squeezing: Shear adhesion gripper with fibrillar thin film. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2305–2312. [Google Scholar]
- Song, S.; Sitti, M. Soft grippers using micro-fibrillar adhesives for transfer printing. Adv. Mater. 2014, 26, 4901–4906. [Google Scholar] [CrossRef] [PubMed]
- Schaler, E.W.; Ruffatto, D.; Glick, P.; White, V.; Parness, A. An electrostatic gripper for flexible objects. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1172–1179. [Google Scholar]
- Coyle, S.; Majidi, C.; LeDuc, P.; Hsia, K.J. Bio-inspired soft robotics: Material selection, actuation, and design. Extrem. Mech. Lett. 2018, 22, 51–59. [Google Scholar] [CrossRef]
- Hsiao, L.Y.; Jing, L.; Li, K.; Yang, H.; Li, Y.; Chen, P.Y. Carbon nanotube-integrated conductive hydrogels as multifunctional robotic skin. Carbon 2020, 161, 784–793. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic networks for soft robotics that actuate rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Ellis, D.R.; Venter, M.P.; Venter, G. Soft Pneumatic Actuator with Bimodal Bending Response Using a Single Pressure Source. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Niu, H.; Feng, R.; Xie, Y.; Jiang, B.; Sheng, Y.; Yu, Y.; Baoyin, H.; Zeng, X. MagWorm: A Biomimetic Magnet Embedded Worm-Like Soft Robot. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Gu, G.; Wang, D.; Ge, L.; Zhu, X. Analytical Modeling and Design of Generalized Pneu-Net Soft Actuators with Three-Dimensional Deformations. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Jolaei, M.; Hooshiar, A.; Dargahi, J.; Packirisamy, M. Toward task autonomy in robotic cardiac ablation: Learning-based kinematic control of soft tendon-driven catheters. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Dang, Y.; Liu, Y.; Hashem, R.; Bhattacharya, D.; Allen, J.; Stommel, M.; Cheng, L.K.; Xu, W. SoGut: A Soft Robotic Gastric Simulator. Soft Robot. 2020. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Cha, Y. Soft Pneumatic Gripper With a Tendon-Driven Soft Origami Pump. Front. Bioeng. Biotechnol. 2020, 8, 461. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Or, K.; Hirai, S. A dual-mode soft gripper for food packaging. Robot. Auton. Syst. 2020, 125, 103427. [Google Scholar] [CrossRef]
- De Barrie, D.; Margetts, R.; Goher, K. SIMPA: Soft-Grasp Infant Myoelectric Prosthetic Arm. IEEE Robot. Autom. Lett. 2020, 5, 698–703. [Google Scholar] [CrossRef]
- Shih, B.; Drotman, D.; Christianson, C.; Huo, Z.; White, R.; Christensen, H.I.; Tolley, M.T. Custom soft robotic gripper sensor skins for haptic object visualization. In Proceedings of the 2017 IEEE/RSJ international conference on intelligent robots and systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 494–501. [Google Scholar]
- Connolly, F.; Walsh, C.J.; Bertoldi, K. Automatic design of fiber-reinforced soft actuators for trajectory matching. Proc. Natl. Acad. Sci. USA 2017, 114, 51–56. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Chen, S.; Wang, Z. A soft-robotic gripper with enhanced object adaptation and grasping reliability. IEEE Robot. Autom. Lett. 2017, 2, 2287–2293. [Google Scholar] [CrossRef]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Ren, Z.; Wang, T.; Wen, L. Universal soft pneumatic robotic gripper with variable effective length. In Proceedings of the 2016 35th Chinese control conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6109–6114. [Google Scholar]
- Yirmibesoglu, O.D.; Morrow, J.; Walker, S.; Gosrich, W.; Cañizares, R.; Kim, H.; Daalkhaijav, U.; Fleming, C.; Branyan, C.; Menguc, Y. Direct 3D printing of silicone elastomer soft robots and their performance comparison with molded counterparts. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 295–302. [Google Scholar]
- Zhong, G.; Hou, Y.; Dou, W. A soft pneumatic dexterous gripper with convertible grasping modes. Int. J. Mech. Sci. 2019, 153, 445–456. [Google Scholar] [CrossRef]
- Yang, H.; Chen, Y.; Sun, Y.; Hao, L. A novel pneumatic soft sensor for measuring contact force and curvature of a soft gripper. Sens. Actuators A Phys. 2017, 266, 318–327. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, S.; Li, C.; Yang, H.; Hao, L. Size recognition and adaptive grasping using an integration of actuating and sensing soft pneumatic gripper. Robot. Auton. Syst. 2018, 104, 14–24. [Google Scholar] [CrossRef]
- Azami, O.; Morisaki, D.; Miyazaki, T.; Kanno, T.; Kawashima, K. Development of the extension type pneumatic soft actuator with built-in displacement sensor. Sens. Actuators A Phys. 2019, 300, 111623. [Google Scholar] [CrossRef]
- Batsuren, K.; Yun, D. Soft robotic gripper with chambered fingers for performing in-hand manipulation. Appl. Sci. 2019, 9, 2967. [Google Scholar] [CrossRef] [Green Version]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.J.; Prachaseree, P.; Loh, K.J. Rapid Soft Material Actuation Through Droplet Evaporation. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Wang, Z.; Kanegae, R.; Hirai, S. Circular Shell Gripper for Handling Food Products. Soft Robot. 2020. [Google Scholar] [CrossRef] [PubMed]
- Hashemi, S.; Bentivegna, D.; Durfee, W. Bone-Inspired Bending Soft Robot. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Manti, M.; Hassan, T.; Passetti, G.; D’Elia, N.; Laschi, C.; Cianchetti, M. A bioinspired soft robotic gripper for adaptable and effective grasping. Soft Robot. 2015, 2, 107–116. [Google Scholar] [CrossRef]
- Li, S.; Stampfli, J.J.; Xu, H.J.; Malkin, E.; Diaz, E.V.; Rus, D.; Wood, R.J. A vacuum-driven origami “magic-ball” soft gripper. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7401–7408. [Google Scholar]
- Wang, Z.; Hirai, S. Chamber dimension optimization of a bellow-type soft actuator for food material handling. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 382–387. [Google Scholar]
- Kuriyama, Y.; Okino, Y.; Wang, Z.; Hirai, S. A wrapping gripper for packaging chopped and granular food materials. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 114–119. [Google Scholar]
- Seibel, A.; Yıldız, M.; Zorlubas, B. A Gecko-Inspired Soft Passive Gripper. Biomimetics 2020, 5, 12. [Google Scholar] [CrossRef] [Green Version]
- Teeple, C.B.; Koutros, T.N.; Graule, M.A.; Wood, R.J. Multi-segment soft robotic fingers enable robust precision grasping. Int. J. Robot. Res. 2020, 39, 1647–1667. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of soft fiber-reinforced bending actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Mutlu, R.; Li, W.; Alici, G. A structural optimisation method for a soft pneumatic actuator. Robotics 2018, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- Galley, A.; Knopf, G.K.; Kashkoush, M. Pneumatic Hyperelastic Actuators for Grasping Curved Organic Objects. Actuators 2019, 8, 76. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Rodrigue, H.; Kim, H.I.; Han, M.W.; Ahn, S.H. Soft composite hinge actuator and application to compliant robotic gripper. Compos. Part B Eng. 2016, 98, 397–405. [Google Scholar] [CrossRef]
- Breitman, P.; Matia, Y.; Gat, A.D. Fluid mechanics of pneumatic soft robots. Soft Robot. 2020. [Google Scholar] [CrossRef] [PubMed]
- Rodrigue, H.; Wang, W.; Kim, D.R.; Ahn, S.H. Curved shape memory alloy-based soft actuators and application to soft gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Zhu, M.; Xie, M.; Lu, X.; Okada, S.; Kawamura, S. A soft robotic finger with self-powered triboelectric curvature sensor based on multi-material 3D printing. Nano Energy 2020, 73, 104772. [Google Scholar] [CrossRef]
- Ltd., F.C. BionicTripod with FinGripper. 2009. Available online: https://www.festo.com/rep/en_corp/assets/pdf/Tripod_en.pdf (accessed on 10 April 2021).
- Hohimer, C.J.; Wang, H.; Bhusal, S.; Miller, J.; Mo, C.; Karkee, M. Design and field evaluation of a robotic apple harvesting system with a 3D-printed soft-robotic end-effector. Trans. ASABE 2019, 62, 405–414. [Google Scholar] [CrossRef]
- Tan, N.; Gu, X.; Ren, H. Design, characterization and applications of a novel soft actuator driven by flexible shafts. Mech. Mach. Theory 2018, 122, 197–218. [Google Scholar] [CrossRef]
- Akbari, S.; Sakhaei, A.H.; Panjwani, S.; Kowsari, K.; Serjouei, A.; Ge, Q. Multimaterial 3D printed soft actuators powered by shape memory alloy wires. Sens. Actuators A Phys. 2019, 290, 177–189. [Google Scholar] [CrossRef] [Green Version]
- Yap, H.K.; Lim, J.H.; Goh, J.C.H.; Yeow, C.H. Design of a soft robotic glove for hand rehabilitation of stroke patients with clenched fist deformity using inflatable plastic actuators. J. Med. Dev. 2016, 10, 044504. [Google Scholar] [CrossRef]
- Alvarez-Palacio, J.M.; Monteiro, E.; Riwan, A.; Mechbal, N. A Novel Inflatable Actuator Based on Simultaneous Eversion Retraction. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Yap, H.K.; Ng, H.Y.; Yeow, C.H. High-force soft printable pneumatics for soft robotic applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Johnston, I.; McCluskey, D.; Tan, C.; Tracey, M. Mechanical characterization of bulk Sylgard 184 for microfluidics and microengineering. J. Micromech. Microeng. 2014, 24, 035017. [Google Scholar] [CrossRef]
- Kim, M.; Moon, B.U.; Hidrovo, C.H. Enhancement of the thermo-mechanical properties of PDMS molds for the hot embossing of PMMA microfluidic devices. J. Micromech. Microeng. 2013, 23, 095024. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.K.; Kim, J.K.; Jeong, O.C. Measurement of nonlinear mechanical properties of PDMS elastomer. Microelectron. Eng. 2011, 88, 1982–1985. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef] [Green Version]
- Pettersson, A.; Davis, S.; Gray, J.O.; Dodd, T.J.; Ohlsson, T. Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes. J. Food Eng. 2010, 98, 332–338. [Google Scholar] [CrossRef]
- Blanes, C.; Mellado, M.; Beltran, P. Novel additive manufacturing pneumatic actuators and mechanisms for food handling grippers. Actuators 2014, 3, 205–225. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Chathuranga, D.S.; Hirai, S. 3D printed soft gripper for automatic lunch box packing. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 503–508. [Google Scholar]
- Blanes, C.; Mellado, M.; Beltrán, P. Tactile sensing with accelerometers in prehensile grippers for robots. Mechatronics 2016, 33, 1–12. [Google Scholar] [CrossRef]
- Wang, Z.; Torigoe, Y.; Hirai, S. A prestressed soft gripper: Design, modeling, fabrication, and tests for food handling. IEEE Robot. Autom. Lett. 2017, 2, 1909–1916. [Google Scholar] [CrossRef]
- Birrell, S.; Hughes, J.; Cai, J.Y.; Iida, F. A field-tested robotic harvesting system for iceberg lettuce. J. Field Robot. 2020, 37, 225–245. [Google Scholar] [CrossRef] [Green Version]
- Gafer, A.; Heymans, D.; Prattichizzo, D.; Salvietti, G. The Quad-Spatula Gripper: A Novel Soft-Rigid Gripper for Food Handling. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 39–45. [Google Scholar]
- Chen, S.; Pang, Y.; Yuan, H.; Tan, X.; Cao, C. Smart Soft Actuators and Grippers Enabled by Self-Powered Tribo-Skins. Adv. Mater. Technol. 2020, 5, 1901075. [Google Scholar] [CrossRef]
- Tawk, C.; Gillett, A.; In het Panhuis, M.; Spinks, G.M.; Alici, G. A 3D-printed omni-purpose soft gripper. IEEE Trans. Robot. 2019, 35, 1268–1275. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.H.; Chiu, C.H.; Chen, T.L.; Pai, T.Y.; Chen, Y.; Hsu, M.C. A soft robotic gripper module with 3D printed compliant fingers for grasping fruits. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 736–741. [Google Scholar]
- Calisti, M.; Arienti, A.; Giannaccini, M.E.; Follador, M.; Giorelli, M.; Cianchetti, M.; Mazzolai, B.; Laschi, C.; Dario, P. Study and fabrication of bioinspired octopus arm mockups tested on a multipurpose platform. In Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, 26–29 September 2010; pp. 461–466. [Google Scholar]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef] [Green Version]
- Festo Corporate. MultiChoiceGripper|Festo Corporate. Available online: https://www.festo.com/group/en/cms/10221.htm (accessed on 10 April 2021).
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in soft robotics: A review of the state of the art. IEEE Robot. Autom. Mag. 2016, 23, 93–106. [Google Scholar] [CrossRef]
- Yang, D.; Verma, M.S.; So, J.H.; Mosadegh, B.; Keplinger, C.; Lee, B.; Khashai, F.; Lossner, E.; Suo, Z.; Whitesides, G.M. Buckling pneumatic linear actuators inspired by muscle. Adv. Mater. Technol. 2016, 1, 1600055. [Google Scholar] [CrossRef]
- Iida, F.; Laschi, C. Soft robotics: Challenges and perspectives. PRocedia Comput. Sci. 2011, 7, 99–102. [Google Scholar] [CrossRef] [Green Version]
- Largilliere, F.; Verona, V.; Coevoet, E.; Sanz-Lopez, M.; Dequidt, J.; Duriez, C. Real-time control of soft-robots using asynchronous finite element modeling. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2550–2555. [Google Scholar]
- Friend, J.; Yeo, L. Fabrication of microfluidic devices using polydimethylsiloxane. Biomicrofluidics 2010, 4, 026502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rateni, G.; Cianchetti, M.; Ciuti, G.; Menciassi, A.; Laschi, C. Design and development of a soft robotic gripper for manipulation in minimally invasive surgery: A proof of concept. Meccanica 2015, 50, 2855–2863. [Google Scholar] [CrossRef] [Green Version]
- Linghu, C.; Zhang, S.; Wang, C.; Yu, K.; Li, C.; Zeng, Y.; Zhu, H.; Jin, X.; You, Z.; Song, J. Universal SMP gripper with massive and selective capabilities for multiscaled, arbitrarily shaped objects. Sci. Adv. 2020, 6, eaay5120. [Google Scholar] [CrossRef] [Green Version]
- Carabin, G.; Palomba, I.; Matt, D.; Vidoni, R. Experimental evaluation and comparison of low-cost adaptive mechatronic grippers. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Torino, Italy, 21–23 June 2017; pp. 630–637. [Google Scholar]
- Lowenberg-DeBoer, J.; Huang, I.Y.; Grigoriadis, V.; Blackmore, S. Economics of robots and automation in field crop production. Precis. Agric. 2019, 21, 278–299. [Google Scholar] [CrossRef] [Green Version]
- Vermeulen, P. Kwantitatieve Informatie voor de Glastuinbouw [Quantitative Information on Greenhouse horticulture] 2012–2013; Wageningen UR Glastuinbouw: Wageningen, The Netherlands, 2012; p. 107. [Google Scholar]
- Navarrete, M.; Jeannequin, B. Effect of frequency of axillary bud pruning on vegetative growth and fruit yield in greenhouse tomato crops. Sci. Hortic. 2000, 86, 197–210. [Google Scholar] [CrossRef]
- Brotons-Martínez, J.; Martin-Gorriz, B.; Torregrosa, A.; Porras, I. Economic evaluation of mechanical harvesting of lemons. Outlook Agric. 2018, 47, 44–50. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, Y.; Fang, Z.; Zhu, W.; Sun, X.; Zhu, Y.; Wang, H.; Tang, K.; Huang, H.; Liu, S.; Wang, Z. A High-Payload Proprioceptive Hybrid Robotic Gripper With Soft Origamic Actuators. IEEE Robot. Autom. Lett. 2020, 5, 3003–3010. [Google Scholar] [CrossRef]
- Ludwig-Ohm, S.; Dirksmeyer, W.; Klockgether, K. Approaches to Reduce Food Losses in German Fruit and Vegetable Production. Sustainability 2019, 11, 6576. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Thomas, C. Quantitative evaluation of mechanical damage to fresh fruits. Trends Food Sci. Technol. 2014, 35, 138–150. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Bending Characteristics | Shearing Characteristics |
|---|---|---|
| Peduncle rotation [61] | X | - |
| Pushing some object into peduncle [53] | X | - |
| Knife, one sided blade [53,77] | - | X |
| Scissors [78] | - | X |
| Saw [49,53] | - | X |
| Hot wire [54,79] | - | X |
| Type of Fruit | Name | Actual Harvesting Method | Automatic Harvesting Method |
|---|---|---|---|
| Drupes | Apricot | 2 | 1 [84,85] |
| Blackberry | 2 | 1 [86] | |
| Cafe | 2 | 1 [87,88] | |
| Cherry | 2 | 1 [89,90,91,92,93,94,95], 2 [96], * [97] | |
| Coconut | 3 | 3 [98,99] | |
| Loquats | 2 | - | |
| Lychee | 3 | * [100,101,102,103] | |
| Mango | 2,3 | 1 [104], 2 [105], 3 [106,107,108], * [109] | |
| Nectarine | 2 | * [110] | |
| Olive | 1 | 1 [111,112,113,114,115] | |
| Peach | 2 | 1 [116], * [117,118] | |
| Plum | 2 | 2 [119] | |
| Raspberry | 2 | 1 [120,121] | |
| Berries | Avocado | 3 | * [122] |
| Blueberry | 2 | 1 [123] | |
| Eggplant | 3 | 3 [50,51], * [124] | |
| Grape | 1,3 | 1 [125,126,127,128], 2 [129], * [130] | |
| Guava | 3 | * [131] | |
| Kiwi | 2 | 2 [132,133,134] | |
| Papaya | 2 | 3 [105], * [135] | |
| Passion fruit | 2 | * [136] | |
| Pepper | 3 | 3 [55,56,57,137,138,139], * [140,141] | |
| Persimmon | 2 | 2 [142], * [143] | |
| Pitaya | 3 | * [144] | |
| Pomegranate | 3 | * [145] | |
| Tomatoes | 2,3 | 2 [46,47,48,49], 3 [146,147], * [148,149,150] | |
| Wolfberry | 2 | 1 [151], 2 [152], * [153] | |
| Pomes | Apple | 1,2 | 1 [154], 2 [42,43,44,45,155,156], 3 [157], * [158,159] |
| Pear | 2 | 3 [157], * [160] | |
| Quince | 2 | - | |
| Hesperidium and Pepo | Banana | 3 | * [161] |
| Cucumber | 3,2 | 3 [54], * [162,163] | |
| Grapefruit | 3 | 1 [164] | |
| Lemon | 3 | * [165] | |
| Lime | 3 | - | |
| Melon | 3 | 3 [52] | |
| Orange | 3 | 1 [34,164,166,167], 3 [53], * [168,169] | |
| Pumpkin | 3 | 2 [170], * [171] | |
| Watermelon | 3 | 3 [172] |
| Type of Fruit | Name | Actual Harvesting Method | Automatic Harvesting Method |
|---|---|---|---|
| Aggregate fruit | Custard Apple | 2 | - |
| Strawberry | 2 | 2 [40,41,66,67,173,174], * [175,176] | |
| Multiple fruit | Fig | 2 | - |
| Pineapple | 2 | 2 [177], 3 [178], * [179,180,181] |
| Soft Technology | Reference | Grasped Object | Object Size or Weight | Gripper Type | Gripper Size | Lifting Ratio | Scalability | Controllability | Response Time | Surface Condition | Mechanical Compliance | Lifetime |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FEAs | [251] * | Lettuce | 250 × 250 mm | Two pneumatic actuators and a blade | 8000 g, 450 × 450 × 300 mm | - | Close-loop with force sensor feedback | 31.7 s | - | - | ||
| [236] * | Apple | - | Three soft finger design | Two fingers length: 95,25 mm One Finger length: 152,4 mm | - | - | Open-loop | 7.3 s | - | - | ||
| [230] | Mushroom | - | Three soft chambers in circular shell | Chamber height: 20 mm Chamber arc angle: | 30 | - | - | Any surface | - | - | ||
| [246] | Apple, Tomato, Carrot, Strawberry | 69 mm, 5–150 g | Magnetorheological gripper | - | - | - | PID | 0.46 s | Any surface | - | ||
| [248] | Cupcake liners filled with peanuts | 34–64 g | Three soft finger design | Finger size: 82 × 16 × 15 mm | - | FE analysis | - | - | - | |||
| [250] | Cupcake liners filled with red beans, higiki, ohitashi | 75.2 g | Soft fingers | Finger length: 97 mm | 1805% | Open-loop | 10 s pick and place (total procedure) | - | - | 1100 | ||
| [224] | Defrosted broccoli | 33.54 × 23.94 mm, 3.8–7.0 g | Two soft fingers | Actuator size: 50 × 20 mm | - | - | - | 3 s for inflation | ||||
| [225] | Granular kernel corn, Chopped green onion, Boiled hijiki | 0.77–26.6 g | Four soft fingers | Finger size: 43 × 61,5 mm | - | Open-loop | - | Any surface | - | - | ||
| [206] | Orange | 1000 g | Soft fingers | Finger size: 95 × 20 × 18 mm | - | Open-loop | - | Any surface | - | - | ||
| [220] | Tomato, Kiwifruit, Strawberry | 45 to 76 mm | Four soft chambers in circular shell | Internal diameter: 46 mm Height: 30 mm | - | Open-loop | 2–5 s | Any surface | - | |||
| Tendon-driven | [253] | Tomato | 500 g | Three soft finger design | - | - | Preprogrammed rotation of motors | - | - | 1000 | ||
| [252] | Tomato, Cucumber (slices) Avocado (Strips) Cherry Tomato, Olives, Pineapples cubes, Broccoli | - | Quad-Spatula design | - | - | - | - | Flat surfaces | - | - | ||
| FEA-Tendon-driven | [254] | Banana, Apple, Grapes | 2700 g | Three soft finger design with a suction cup | 389.69 g | 7.06 | Teleoperation Control | 0.094 s (Rise time) | Any surface (irregular shapes and sharp corners) | 26–20 cycles | ||
| Topology optimized soft actuators | [255] | Apple, Grapefruit, Guava, Orange, Kiwifruit | 1400 g | Two compliant fingers | - | - | Open-loop (Arduino) | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de-Santos, P. Soft Grippers for Automatic Crop Harvesting: A Review. Sensors 2021, 21, 2689. https://doi.org/10.3390/s21082689
Navas E, Fernández R, Sepúlveda D, Armada M, Gonzalez-de-Santos P. Soft Grippers for Automatic Crop Harvesting: A Review. Sensors. 2021; 21(8):2689. https://doi.org/10.3390/s21082689
Chicago/Turabian StyleNavas, Eduardo, Roemi Fernández, Delia Sepúlveda, Manuel Armada, and Pablo Gonzalez-de-Santos. 2021. "Soft Grippers for Automatic Crop Harvesting: A Review" Sensors 21, no. 8: 2689. https://doi.org/10.3390/s21082689