
A Compensation Method for Nonlinear Vibration of Silicon-Micro Resonant Sensor

Abstract
:
1. Introduction
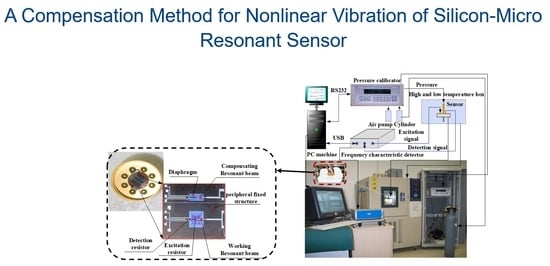
2. Working Principle of Silicon-Micro Resonant Sensor
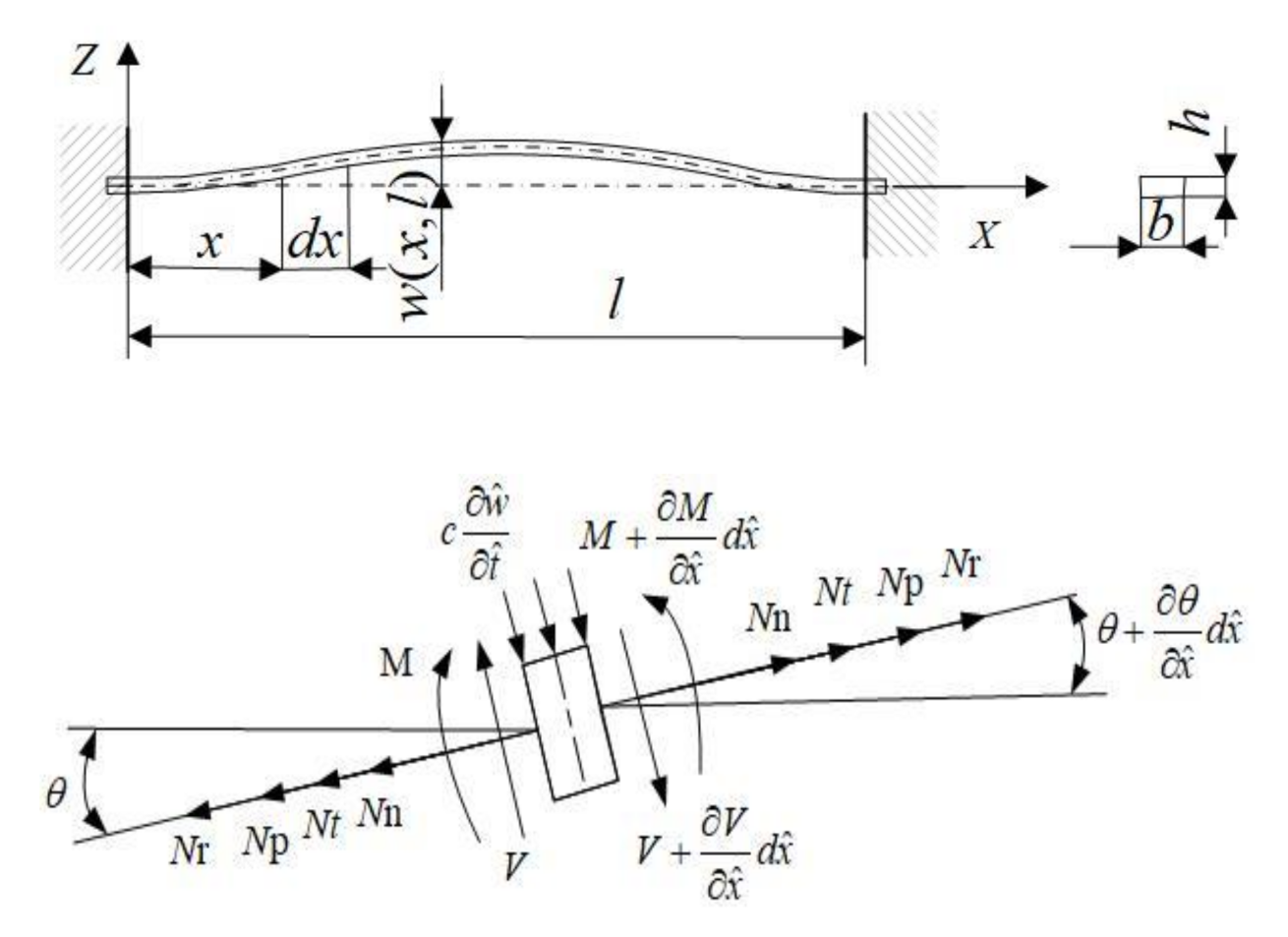
3. Measurement Error of the Resonant Beam Nonlinear Vibration
3.1. Parameter Characterization of Nonlinear Vibration
3.2. The Solution of the Nonlinear Vibration Parameters Characterization
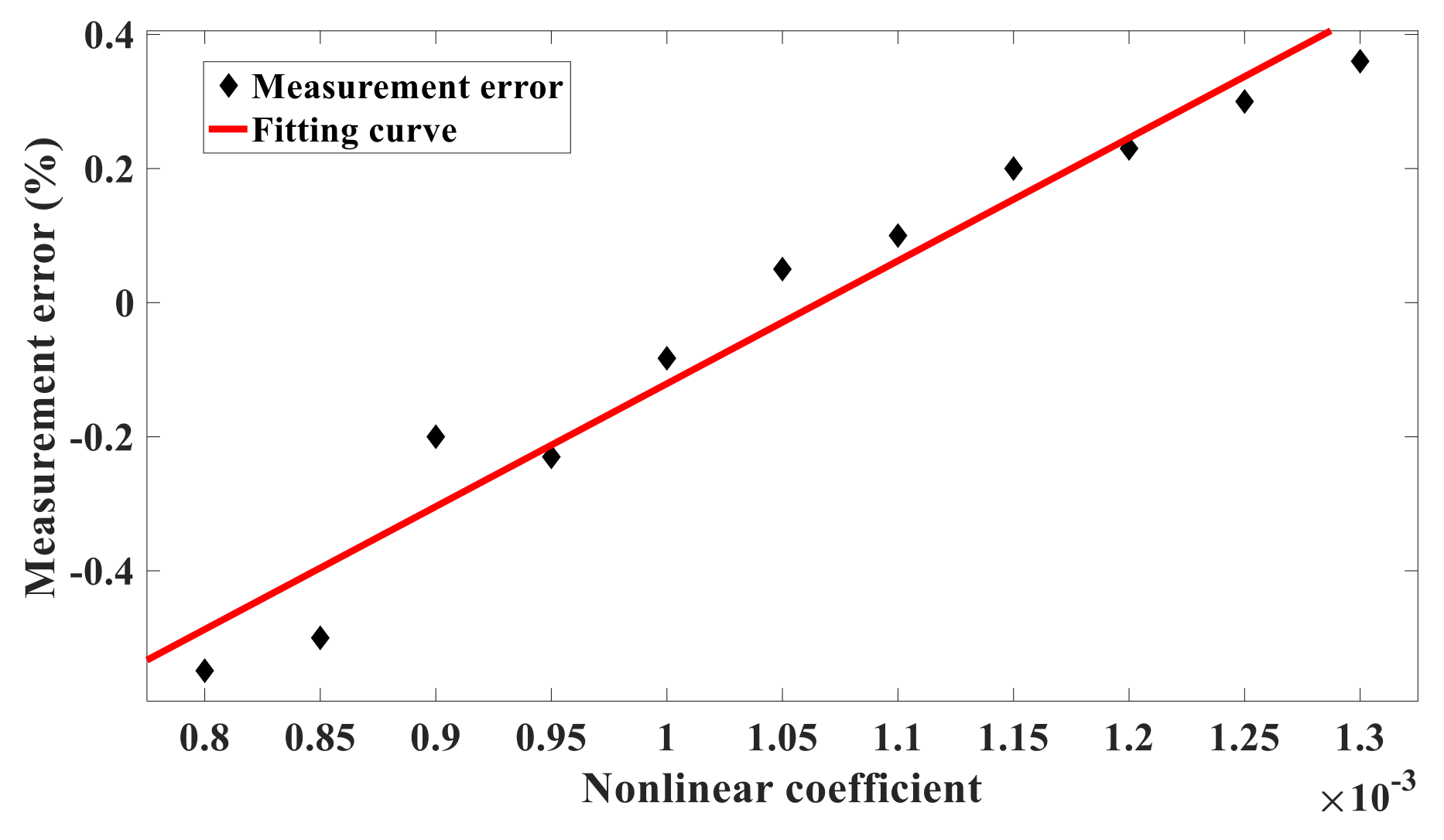
3.3. Measurement Error Caused by Nonlinear Vibration
3.4. Circuit Verification of Nonlinear Vibration Measurement Error
4. The Measurement Error Compensation Method for Nonlinear Vibration
4.1. Compensation Principle
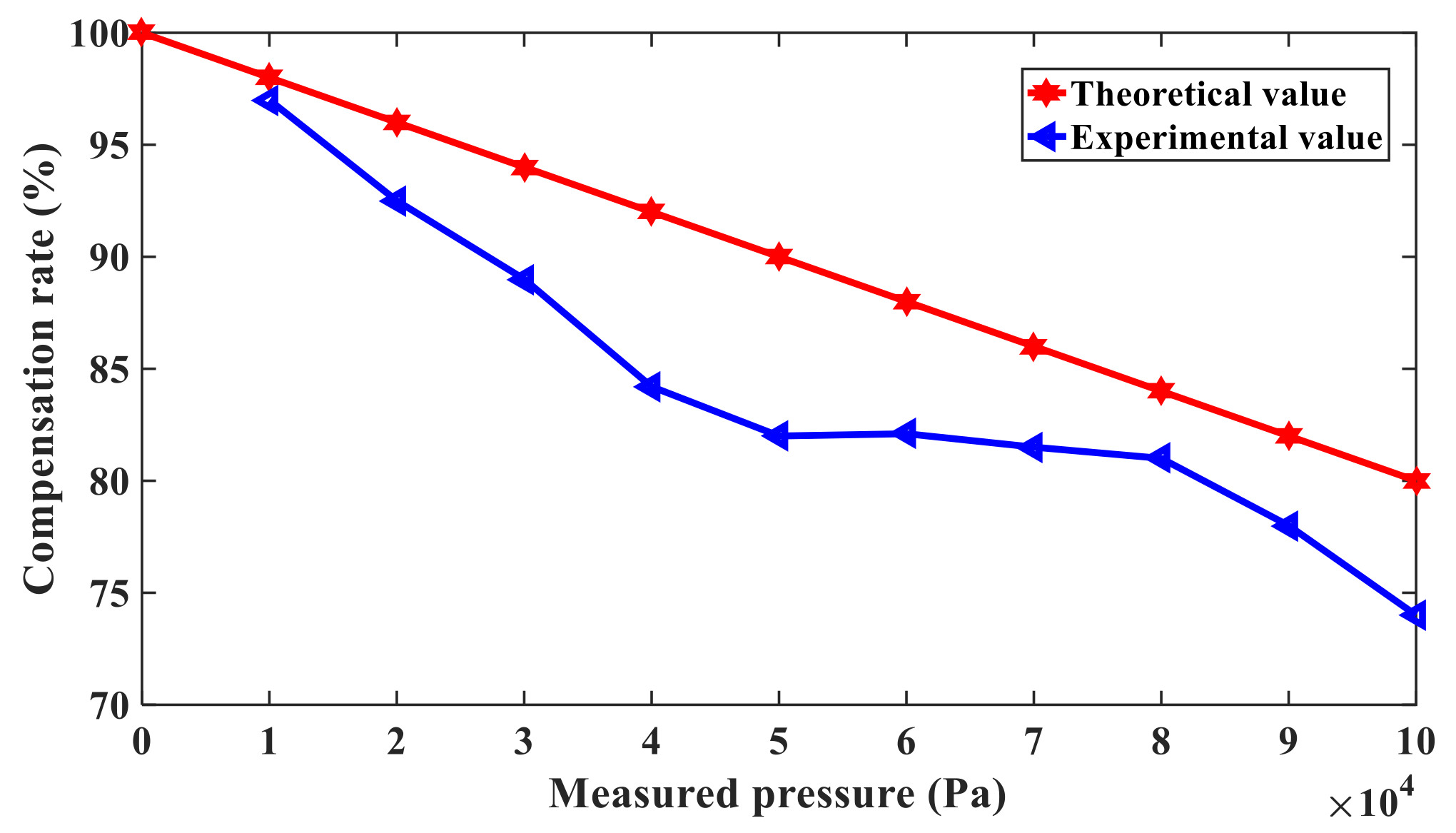
4.2. Experiment of Error Compensation Method
5. Conclusions
- The working principle of the silicon-micro resonant sensor is analyzed, the model of the resonant beam is simplified, and the parameter characterization of the resonant beam nonlinear vibration is obtained. The multiscale method in the perturbation method is used to solve the parameter characterization to obtain the amplitude-frequency response and phase-frequency response. Furthermore, the measurement error of the resonant beam is obtained, and it is verified by the verification circuit that the frequency offset and measurement error are positively correlated with the nonlinear vibration.
- In order to compensate for the measurement error considered nonlinear vibration, a compensation method applying double silicon-micro resonant beams for the pressure sensor is proposed. The compensation principle, algorithms, and measurement error are discussed.
- A series of measurement experiments were carried out, which were used to obtain the nonlinear vibration frequency response curve under different measured pressure and temperature; it can be obtained that the measurement error and compensation rate were a good match in the predicted trends, which verifies the effectiveness of the compensation method.
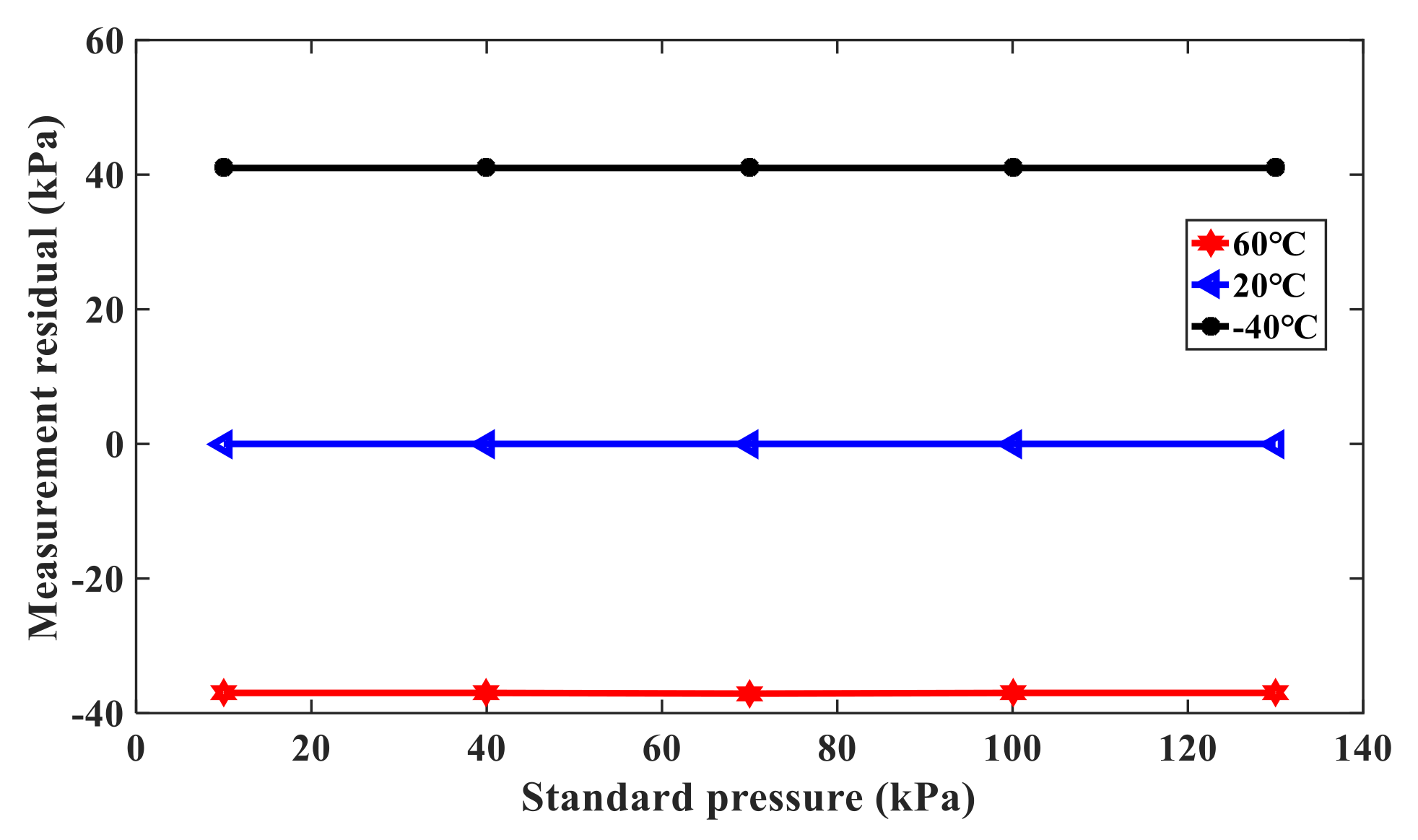
- From the measured pressure residual experiments results, which further verified the advantages of the compensation method, it was also verified that the double resonant beam structure is not sensitive to the temperature deviation. Therefore, the double silicon-micro resonant beam pressure sensor has a promoting effect on the development of the aerospace industry.
- In the future, we will consider an algorithm that automatically tunes some of the parameters to counteract the nonlinearity induced frequency error instead of using the typical structural compensation approach.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, H.; Fan, S.; Zhang, Y.; Sun, J. Design and optimization based on uncertainty analysis in electro-thermal excited MEMS resonant sensor. Microsyst. Technol. 2014, 21, 757–771. [Google Scholar] [CrossRef]
- Hök, B. New microtransducer for physiological pressure recordings. Med Biol. Eng. Comput. 1975, 13, 279–284. [Google Scholar] [CrossRef] [PubMed]
- Doerr, C.R.; Shirasaki, M.; Haus, H.A. Dispersion of pulsed squeezing for reduction of sensor nonlinearity. Opt. Lett. 1992, 17, 1617–1619. [Google Scholar] [CrossRef] [PubMed]
- Zeng, K.F.; Tep, K.C.; Grimes, C.A. Nonlinear effect in magnetoelas-Tic sensors. Sens. Lett. 2005, 3, 222–224. [Google Scholar] [CrossRef]
- Chiou, J.A.; Chen, S. Pressure nonlinearity of micro-machined piezoresistive pressure sensors with thin diaphragms under high residual stresses. Sens. Actuat. A-Phys. 2008, 147, 332–339. [Google Scholar] [CrossRef]
- Hu, Z.; Gallacher, B.J.; Harish, K.M.; Burdess, J.S. An experimental study of high gain parametric amplification in MEMS. Sensors Actuators A Phys. 2010, 162, 145–154. [Google Scholar] [CrossRef]
- Kacem, N.; Baguet, S.; Hentz, S.; Dufour, R. Computational and quasi-analytical models for non-linear vibrations of resonant MEMS and NEMS sensors. Int. J. Nonlinear Mech. 2011, 46, 532–542. [Google Scholar] [CrossRef] [Green Version]
- Shi, H.; Fan, S.; Zhang, Y.; Sun, J. Nonlinear dynamics study based on uncertainty analysis in electro-thermal excited MEMS resonant sensor. Sens. Actuator. A Phys. 2015, 232, 103–114. [Google Scholar] [CrossRef]
- Li, H.B.; Yang, F.P.; Wang, X. Nonlinear resonant frequency of graphene/elastic/piezoelectric laminated films under active electric loading. Int. J. Mech. Sci. 2016, 115, 624–633. [Google Scholar] [CrossRef] [Green Version]
- Kang, D.-K.; Yang, H.-I.; Kim, C.-W. Geometrically nonlinear dynamic behavior on detection sensitivity of carbon nanotube-based mass sensor using finite element method. Finite Elem. Anal. Des. 2017, 126, 39–49. [Google Scholar] [CrossRef]
- Li, L.; Han, J.; Zhang, Q.; Liu, C.; Guo, Z. Nonlinear dynamics and parameter identification of electrostatically coupled resonators. Int. J. Nonlinear Mech. 2019, 110, 104–114. [Google Scholar] [CrossRef]
- Fu, X.; Xu, L. Multi-field coupled chaotic vibration for a micro resonant pressure sensor. Appl. Math. Model. 2019, 72, 470–485. [Google Scholar] [CrossRef]
- Pugno, N.; Surace, C.; Ruotolo, R. Evaluation of the non-linear dynamic response to harmonic excitation of a beam with several breathing cracks. J. Sound Vib. 2000, 235, 749–762. [Google Scholar] [CrossRef] [Green Version]
- Khirallah, K. Parametric excitation, amplification, and tuning of MEMS folded-beam comb drive oscillator. J. Microelectromech. Syst. 2012, 22, 318–330. [Google Scholar] [CrossRef]
- Urbikain, G.; de Lacalle, L.L.; Campa, F.; Fernández, A.; Elías, A. Stability prediction in straight turning of a flexible workpiece by collocation method. Int. J. Mach. Tools Manuf. 2012, 54–55, 73–81. [Google Scholar] [CrossRef]
- Xu, L.; Fu, X. Effects of Casimir force on multi-field coupled nonlinear vibration of orthotropic micro film. J. Vibroeng. 2017, 19, 5702–5718. [Google Scholar] [CrossRef] [Green Version]
- Urbikain, G.; Campa, F.-J.; Zulaika, J.-J.; de Lacalle, L.-N.L.; Alonso, M.-A.; Collado, V. Preventing chatter vibrations in heavy-duty turning operations in large horizontal lathes. J. Sound Vib. 2015, 340, 317–330. [Google Scholar] [CrossRef]
- Wei, Y.; Dong, Y.; Huang, X.; Zhang, Z. Nonlinearity measurement for low-pressure encapsulated MEMS gyroscopes by transient response. Mech. Syst. Signal Process. 2018, 100, 534–549. [Google Scholar] [CrossRef]
- Kim, D.G.; Hong, S.K. Tee compensation of nonlinear thermal bias drift of resonant rate sensor (RRS) using fuzzy logic. IEEE Trans. Aerosp. Electron. Syst. 1998, 78, 38–42. [Google Scholar]
- Pramanik, C.; Islam, T.; Saha, H. Temperature compensation of piezoresistive micro-machined porous silicon pressure sensor by ANN. Microelectron. Reliab. 2006, 46, 343–351. [Google Scholar] [CrossRef]
- Araghi, G.; Landry, R.J. Temperature compensation model of MEMS inertial sensors based on neural network. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 301–309. [Google Scholar]
- Wu, T.; Chen, S.; Wu, P.; Nie, S. A high precision software compensation algorithm for silicon piezoresistive pressure sensor. Chin. J. Electron. 2019, 28, 748–753. [Google Scholar] [CrossRef]
- Li, Y.; Fan, S.; Guo, Z.; Li, J.; Cao, L.; Zhuang, H. Mathieu equation with application to analysis of dynamic characteristics of resonant inertial sensors. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 401–410. [Google Scholar] [CrossRef]
- Li, Y.; Qu, Y.; Zhang, Y.; Li, Q. Dynamic characteristics of resonant vibratory gyroscopes based on the damped Mathieu equation. Sens. Rev. 2017, 37, 451–457. [Google Scholar] [CrossRef]
- Li, Y.; Fan, S.; Guo, Z.; Li, J.; Cao, L. Frequency measurement study of resonant vibratory gyroscopes. J. Sound Vib. 2012, 331, 4417–4424. [Google Scholar] [CrossRef]
- Li, Q.; Fan, S.; Tang, Z.; Xing, W. Non-linear dynamics of an electrothermally excited resonant pressure sensor. Sens. Actuators A Phys. 2012, 188, 19–28. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| Lateral vibration displacement | |
| Viscous damping coefficient | |
| Young’s modulus of materials | |
| The moment of inertia of resonant beam cross section | |
| Material density | |
| Poisson’s ratio of materials | |
| Width of the resonant beam | |
| Length of resonant beam | |
| Thickness of resonant beam | |
| Edge length of the square diaphragm | |
| Coefficient of thermal expansion | |
| The average axial temperature rises of the resonant beam | |
| The axial tension | |
| The axial pressure caused by static thermal power | |
| The axial tension caused by the measured pressure | |
| The axial residual stress |
| R10 | Frequency Offset |
|---|---|
| 80 Ω | −0.285 kHz |
| 85 Ω | −0.251 kHz |
| 90 Ω | −0.188 kHz |
| 95 Ω | −0.177 kHz |
| 100 Ω | −0.043 kHz |
| 105 Ω | 0.026 kHz |
| 110 Ω | 0.056 kHz |
| 115 Ω | 0.092 kHz |
| 120 Ω | 0.128 kHz |
| 125 Ω | 0.157 kHz |
| 130 Ω | 0.187 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, H.; Xiao, Y.; Cao, L.; Guo, Z.-S. A Compensation Method for Nonlinear Vibration of Silicon-Micro Resonant Sensor. Sensors 2021, 21, 2545. https://doi.org/10.3390/s21072545
Li Y, Li H, Xiao Y, Cao L, Guo Z-S. A Compensation Method for Nonlinear Vibration of Silicon-Micro Resonant Sensor. Sensors. 2021; 21(7):2545. https://doi.org/10.3390/s21072545
Chicago/Turabian StyleLi, Yan, Hao Li, Yifeng Xiao, Le Cao, and Zhan-She Guo. 2021. "A Compensation Method for Nonlinear Vibration of Silicon-Micro Resonant Sensor" Sensors 21, no. 7: 2545. https://doi.org/10.3390/s21072545