
Driving Stress Detection Using Multimodal Convolutional Neural Networks with Nonlinear Representation of Short-Term Physiological Signals




Abstract
:1. Introduction
- Employing short-term (30-s or less) FGSR, HGSR, and HR signals, which have not been fully utilized in previous stress classification studies.
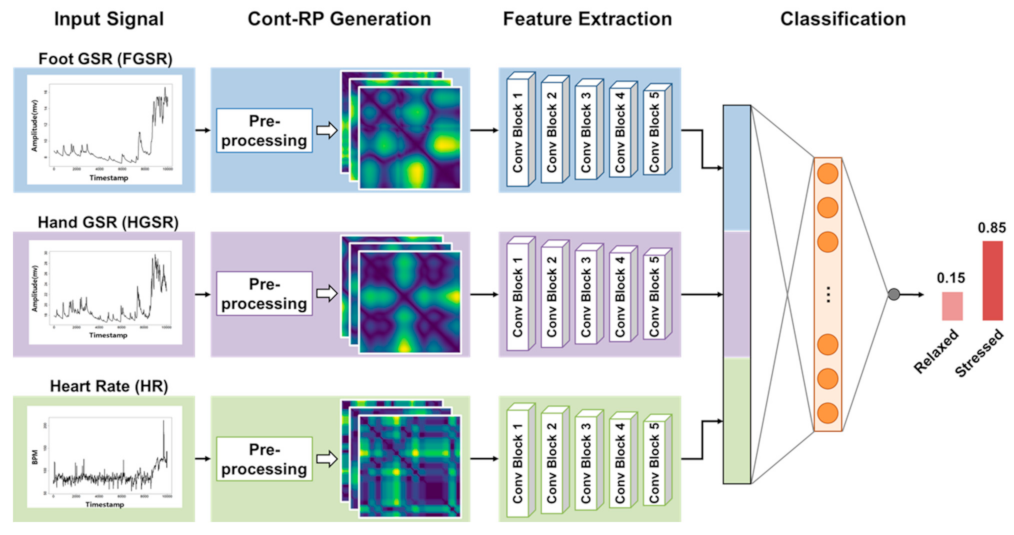
- Investigating continuous RPs (Cont-RPs) obtained by converting one-dimensional time series into two-dimensional matrices for exploring features differentiating between stressed and relaxed states.
- Proposing a multimodal CNN classifier based on Cont-RPs and validating its effectiveness in drivers’ stress classification.
2. Materials and Methods
2.1. Driving Stress Dataset
2.2. Preprocessing
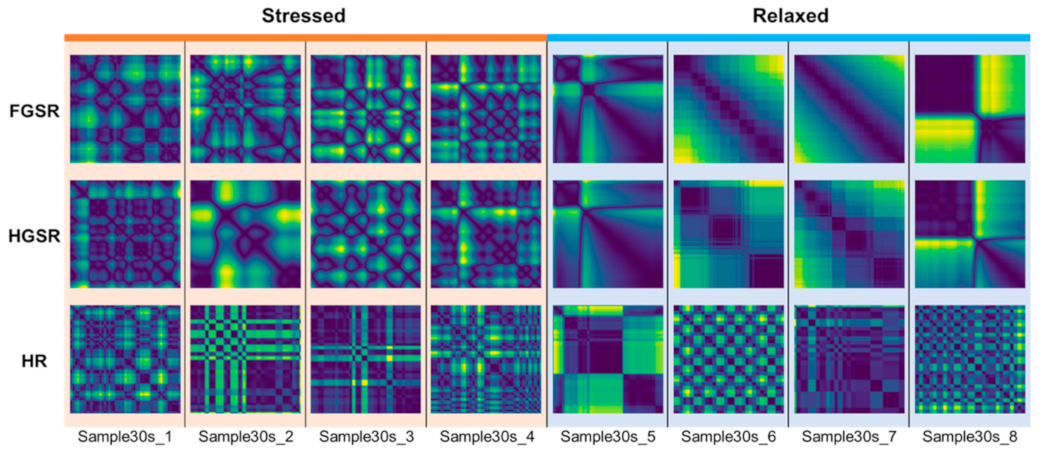
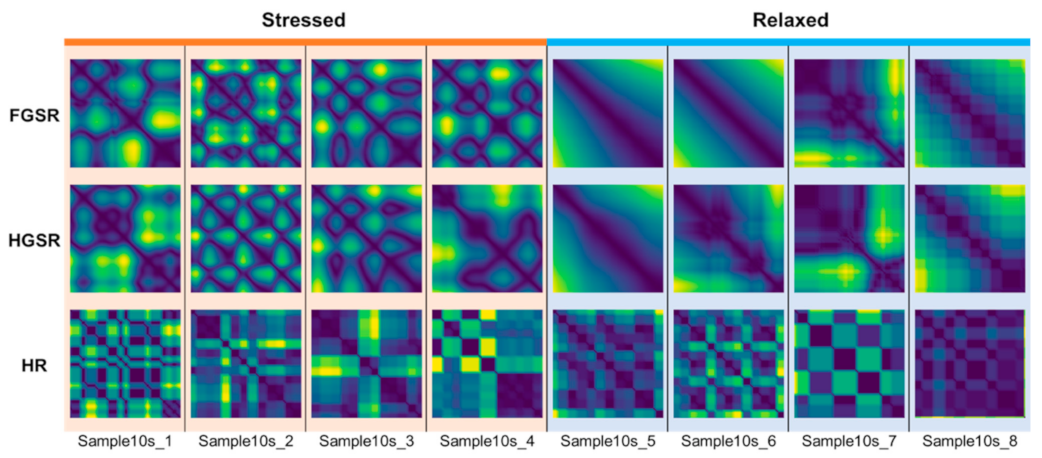
2.3. Stress-Relevant Characteristics of Cont-RPs
2.4. Feature Learning and Classification Based on Cont-RPs
3. Results and Discussion
3.1. Experimental Setup
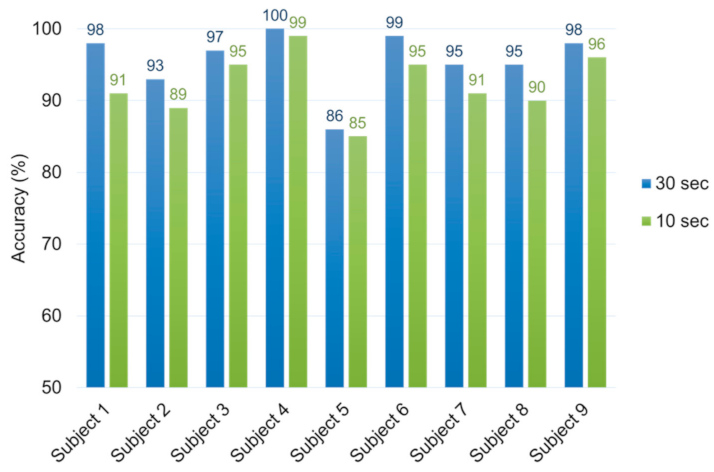
3.2. Performance Evaluation
3.3. Comparison with Related Works
3.4. Visualization of Learned Feature Distributions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kivimäki, M.; Steptoe, A. Effects of stress on the development and progression of cardiovascular disease. Nat. Rev. Cardiol. 2018, 15, 215. [Google Scholar] [CrossRef]
- Rodríguez-Arce, J.; Lara-Flores, L.; Portillo-Rodríguez, O.; Martínez-Méndez, R. Towards an anxiety and stress recognition system for academic environments based on physiological features. Comput. Meth. Prog. Bio. 2020, 190, 105408. [Google Scholar] [CrossRef] [PubMed]
- Celka, P.; Charlton, P.H.; Farukh, B.; Chowienczyk, P.; Alastruey, J. Influence of mental stress on the pulse wave features of photoplethysmograms. Healthc. Technol. Lett. 2020, 7, 7–12. [Google Scholar] [CrossRef]
- Shah, P.; Khaleel, M.; Thuptimdang, W.; Sunwoo, J.; Veluswamy, S.; Chalacheva, P.; Kato, R.M.; Detterich, J.; Wood, J.C.; Zeltzer, L.; et al. Mental stress causes vasoconstriction in subjects with sickle cell disease and in normal controls. Haematologica 2020, 105, 83–90. [Google Scholar] [CrossRef] [PubMed]
- American Psychological Association. Stress in America: The State of Our Nation; Stress in America Survey; American Psychological Association: Washington, DC, USA, 2017. [Google Scholar]
- Khowaja, S.A.; Prabono, A.G.; Setiawan, F.; Yahya, B.N.; Lee, S.L. Toward soft real-time stress detection using wrist-worn devices for human workspaces. Soft Comput. 2020, 25, 2793–2820. [Google Scholar] [CrossRef]
- Rastgoo, M.N.; Nakisa, B.; Rakotonirainy, A.; Chandran, V.; Tjondronegoro, D. A critical review of proactive detection of driver stress levels based on multimodal measurements. ACM Comput. Surv. 2018, 51, 1–35. [Google Scholar] [CrossRef] [Green Version]
- Munla, N.; Khalil, M.; Shahin, A.; Mourad, A. Driver stress level detection using HRV analysis. In Proceedings of the 2015 International Conference on Advances in Biomedical Engineering (ICABME), Beirut, Lebanon, 16–18 September 2015; pp. 61–64. [Google Scholar] [CrossRef]
- Muñoz-Organero, M.; Corcoba-Magaña, V. Predicting Upcoming Values of Stress While Driving. IEEE T. Intell. Transp. Syst. 2017, 18, 1802–1811. [Google Scholar] [CrossRef]
- Lanatà, A.; Valenza, G.; Greco, A.; Gentili, C.; Bartolozzi, R.; Bucchi, F.; Frendo, F.; Scilingo, E.P. How the autonomic nervous system and driving style change with incremental stressing conditions during simulated driving. IEEE T. Intell. Transp. Syst. 2014, 16, 1505–1517. [Google Scholar] [CrossRef]
- Rastgoo, M.N.; Nakisa, B.; Maire, F.; Rakotonirainy, A.; Chandran, V. Automatic driver stress level classification using multimodal deep learning. Expert Syst. Appl. 2019, 138, 112793. [Google Scholar] [CrossRef]
- Lim, S.; Yang, J.H. Driver state estimation by convolutional neural network using multimodal sensor data. Electron. Lett. 2016, 52, 1495–1497. [Google Scholar] [CrossRef] [Green Version]
- Gao, H.; Yüce, A.; Thiran, J.P. Detecting emotional stress from facial expressions for driving safety. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 5961–5965. [Google Scholar] [CrossRef] [Green Version]
- Zalabarria, U.; Irigoyen, E.; Martinez, R.; Larrea, M.; Salazar-Ramirez, A. A Low-Cost, Portable Solution for Stress and Relaxation Estimation Based on a Real-Time Fuzzy Algorithm. IEEE Access 2020, 8, 74118–74128. [Google Scholar] [CrossRef]
- Zhang, J.; Mei, X.; Liu, H.; Yuan, S.; Qian, T. Detecting Negative Emotional Stress Based on Facial Expression in Real Time. In Proceedings of the 2019 IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 19–21 July 2019; pp. 430–434. [Google Scholar]
- Soman, K.; Alex, V.; Srinivas, C. Analysis of physiological signals in response to stress using ECG and respiratory signals of automobile drivers. In Proceedings of the 2013 International Multi-Conference on Automation, Computing, Communication, Control and Compressed Sensing (iMac4s), Kottayam, India, 22–23 March 2013; pp. 574–579. [Google Scholar] [CrossRef]
- Greene, S.; Thapliyal, H.; Caban-Holt, A. A survey of affective computing for stress detection: Evaluating technologies in stress detection for better health. IEEE Consum. Electr. Mag. 2016, 5, 44–56. [Google Scholar] [CrossRef]
- Elgendi, M.; Menon, C. Machine Learning Ranks ECG as an Optimal Wearable Biosignal for Assessing Driving Stress. IEEE Access 2020, 8, 34362–34374. [Google Scholar] [CrossRef]
- Christopoulos, G.I.; Uy, M.A.; Yap, W.J. The Body and the Brain: Measuring Skin Conductance Responses to Understand the Emotional Experience. Organ. Res. Methods 2016, 22, 1–27. [Google Scholar] [CrossRef]
- Aqajari, S.A.H.; Naeini, E.K.; Mehrabadi, M.A.; Labbaf, S.; Rahmani, A.M.; Dutt, N. GSR Analysis for Stress: Development and Validation of an Open Source Tool for Noisy Naturalistic GSR Data. arXiv 2020, arXiv:2005.01834. [Google Scholar]
- Mishra, V.; Pope, G.; Lord, S.; Lewia, S.; Lowens, B.; Caine, K.; Sen, S.; Halter, R.; Kotz, D. Continuous detection of physiological stress with commodity hardware. ACM Trans. Comput. Healthc. 2020, 1, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Zontone, P.; Affanni, A.; Bernardini, R.; Piras, A.; Rinaldo, R. Stress detection through electrodermal activity (EDA) and electrocardiogram (ECG) analysis in car drivers. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Guardiola, S.; Girbés, V.; Armesto, L.; Dols, J.; Tornero, J. Physiological Signal Analysis for Driver Stress Detection. Available online: https://www.researchgate.net/publication/320244776_PHYSIOLOGICAL_SIGNAL_ANALYSIS_FOR_DRDRIV_STRESS_DETECTION (accessed on 25 January 2021).
- Memar, M.; Mokaribolhassan, A. Stress level classification using statistical analysis of skin conductance signal while driving. SN Appl. Sci. 2021, 3, 1–9. [Google Scholar] [CrossRef]
- Bianco, S.; Napoletano, P.; Schettini, R. Multimodal car driver stress recognition. In Proceedings of the 13th EAI International Conference on Pervasive Computing Technologies for Healthcare, Trento, Italy, 20–23 May 2019; pp. 302–307. [Google Scholar] [CrossRef]
- Chen, L.L.; Zhao, Y.; Ye, P.F.; Zhang, J.; Zou, J.Z. Detecting driving stress in physiological signals based on multimodal feature analysis and kernel classifiers. Expert Syst. Appl. 2017, 85, 279–291. [Google Scholar] [CrossRef]
- Seo, W.; Kim, N.; Kim, S.; Lee, C.; Park, S.M. Deep ECG-respiration network (DeepER net) for recognizing mental stress. Sensors 2019, 19, 3021. [Google Scholar] [CrossRef] [Green Version]
- Šalkevicius, J.; Damaševičius, R.; Maskeliunas, R.; Laukienė, I. Anxiety level recognition for virtual reality therapy system using physiological signals. Electronics 2019, 8, 1039. [Google Scholar] [CrossRef] [Green Version]
- Castaldo, R.; Melillo, P.; Bracale, U.; Caserta, M.; Triassi, M.; Pecchia, L. Acute mental stress assessment via short term HRV analysis in healthy adults: A systematic review with meta-analysis. Biomed. Signal Process. Control 2015, 18, 370–377. [Google Scholar] [CrossRef] [Green Version]
- Jiménez-Limas, M.A.; Ramírez-Fuentes, C.A.; Tovar-Corona, B.; Garay-Jiménez, L.I. Feature selection for stress level classification into a physiologycal signals set. In Proceedings of the 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 5–7 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, J.S.; Lin, C.W.; Yang, Y.T.C. A k-nearest-neighbor classifier with heart rate variability feature-based transformation algorithm for driving stress recognition. Neurocomputing 2013, 116, 136–143. [Google Scholar] [CrossRef]
- Ghaderi, A.; Frounchi, J.; Farnam, A. Machine learning-based signal processing using physiological signals for stress detection. In Proceedings of the 2015 22nd Iranian Conference on Biomedical Engineering (ICBME), Tehran, Iran, 25–27 November 2015; pp. 93–98. [Google Scholar] [CrossRef]
- Marwan, N.; Wessel, N.; Meyerfeldt, U.; Schirdewan, A.; Kurths, J. Recurrence-plot-based measures of complexity and their application to heart-rate-variability data. Phys. Rev. E 2002, 66, 026702. [Google Scholar] [CrossRef] [Green Version]
- Singh, V.; Gupta, A.; Sohal, J.S.; Singh, A. A unified non-linear approach based on recurrence quantification analysis and approximate entropy: Application to the classification of heart rate variability of age-stratified subjects. Med. Biol. Eng. Comput. 2019, 57, 741–755. [Google Scholar] [CrossRef] [PubMed]
- Dimitriev, D.; Saperova, E.V.; Dimitriev, A.; Karpenko, Y. Recurrence Quantification Analysis of Heart Rate during Mental Arithmetic Stress in Young Females. Front. Physiol. 2020, 11, 40. [Google Scholar] [CrossRef] [PubMed]
- Marwan, N.; Romano, M.C.; Thiel, M.; Kurths, J. Recurrence plots for the analysis of complex systems. Phys. Rep. 2007, 438, 237–329. [Google Scholar] [CrossRef]
- Healey, J.A.; Picard, R.W. Detecting stress during real-world driving tasks using physiological sensors. IEEE T. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef] [Green Version]
- Hwang, B.; You, J.; Vaessen, T.; Myin-Germeys, I.; Park, C.; Zhang, B.T. Deep ECGNet: An optimal deep learning framework for monitoring mental stress using ultra short-term ECG signals. Telemed. J. E-Health 2018, 24, 753–772. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Wang, K.; Murphey, Y.L.; Zhou, Y.; Hu, X.; Zhang, X. Detection of driver stress in real-world driving environment using physiological signals. In Proceedings of the 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), Helsinki, Finland, 22–25 July 2019; Volume 1, pp. 1807–1814. [Google Scholar] [CrossRef]
- Lopez-Martinez, D.; El-Haouij, N.; Picard, R. Detection of Real-world Driving-induced Affective State Using Physiological Signals and Multi-view Multi-task Machine Learning. In Proceedings of the 2019 8th International Conference on Affective Computing and Intelligent Interaction Workshops and Demos (ACIIW), Cambridge, UK, 3–6 September 2019; pp. 356–361. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Guo, P. An Ensemble Classification Model with Unsupervised Representation Learning for Driving Stress Recognition Using Physiological Signals. IEEE T. Intell. Transp. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Singh, R.R.; Conjeti, S.; Banerjee, R. A comparative evaluation of neural network classifiers for stress level analysis of automotive drivers using physiological signals. Biomed. Signal Process. Control 2013, 8, 740–754. [Google Scholar] [CrossRef]
- Maaten, L.V.D.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Domain | Physiological Signals | Feature Examples | Study |
|---|---|---|---|
| Time | GSR, ECG, HR, ST, BR, SpO2, BVP | Mean, Median, SD, RMS, Skewness, Kurtosis, Maximum, Minimum, Interquartile range, Sum, Amplitude, Rise time, Means of differences between adjacent elements, Number of peaks | [2,6,23,24,25,26,27,28] |
| Frequency | GSR, ECG, RSP | Entropy, Power spectrum density, Power sum, The average power, LF, HF, Ratio of LF/HF, Spectral peak features | [6,25,26,27,29,30] |
| Domain-dependent | GSR, ECG, RSP, EMG | Mean HP, Variation in HP, Variation in GSR, Differential area between GSR and its first-order interpolation, Product between RMS and SDCC, Trend-based feature generation | [14,31,32] |
| Nonlinear | ECG | RP, RQA, Poincare plot | [6,34,35] |
| Excluded Recording | Reason |
|---|---|
| drive 01 | Marker signal is missing. |
| drive 02 | HGSR signal is missing. |
| drive 03 | Marker and HR signals are missing. |
| drive 04 | Marker signal is not clear. |
| drive 05 | HR signal is missing. |
| drive 13 | HGSR signal is missing. |
| drive 14 | HR signal is missing. |
| drive 17 | Marker signal is missing. |
| Sensor | FGSR | HGSR | HR | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Status (Stress Level) | Rest (Low) | Highway Driving (Medium) | City Driving (High) | Rest (Low) | Highway Driving (Medium) | City Driving (High) | Rest (Low) | Highway Driving (Medium) | City Driving (High) |
| drive 06 | 7.42 ± 1.80 | 7.25 ± 1.22 | 10.29 ± 2.64 | 18.36 ± 1.32 | 16.19 ± 1.77 | 19.36 ± 1.91 | 80.24 ± 9.35 | 88.31 ± 10.50 | 99.75 ± 13.19 |
| drive 07 | 9.21 ± 3.36 | 12.76 ± 1.16 | 12.81 ± 1.72 | 5.46 ± 1.71 | 6.76 ± 1.17 | 7.75 ± 1.20 | 70.9 ± 8.41 | 73.44 ± 5.55 | 78.22 ± 7.60 |
| drive 08 | 2.89 ± 0.93 | 6.44 ± 0.90 | 6.80 ± 1.19 | 3.21 ± 0.67 | 5.45 ± 0.97 | 6.03 ± 1.54 | 63.65 ± 12.53 | 66.49 ± 11.04 | 74.87 ± 24.93 |
| drive 09 | 3.55 ± 1.70 | 5.12 ± 0.99 | 5.27 ± 1.10 | 4.40 ± 2.39 | 5.66 ± 1.35 | 6.60 ± 1.69 | 71.24 ± 15.33 | 73.36 ± 18.20 | 74.03 ± 15.36 |
| drive 10 | 4.62 ± 3.23 | 6.96 ± 2.12 | 9.66 ± 2.23 | 6.98 ± 4.05 | 6.44 ± 1.75 | 9.32 ± 2.60 | 75.35 ± 10.60 | 77.66 ± 7.92 | 83.73 ± 12.99 |
| drive 11 | 3.24 ± 0.89 | 5.61 ± 0.86 | 6.23 ± 1.28 | 3.53 ± 1.21 | 7.32 ± 1.36 | 8.52 ± 1.94 | 60.64 ± 9.53 | 71.42 ± 21.00 | 75.54 ± 23.85 |
| drive 12 | 3.32 ± 2.99 | 4.07 ± 1.27 | 5.35 ± 3.40 | 7.67 ± 2.70 | 15.44 ± 2.21 | 15.53 ± 2.00 | 78.72 ± 4.57 | 87.59 ± 4.06 | 88.44 ± 6.32 |
| drive 15 | 4.35 ± 1.38 | 6.84 ± 0.80 | 7.69 ± 1.37 | 4.55 ± 1.01 | 6.67 ± 1.25 | 7.77 ± 1.86 | 69.83 ± 24.91 | 67.98 ± 11.01 | 72.36 ± 14.48 |
| drive 16 | 3.74 ± 0.91 | 5.71 ± 0.74 | 6.90 ± 1.31 | 16.09 ± 1.84 | 20.10 ± 1.07 | 21.21 ± 2.11 | 89.16 ± 10.30 | 101.9 ± 12.65 | 106.1 ± 17.57 |
| Input Length | Class | Precision (PPV) | Recall (Sensitivity) | F1-Score | Overall Accuracy | AUC |
|---|---|---|---|---|---|---|
| 30 s | Stressed | 95.7% | 96.0% | 95.8% | ||
| Relaxed | 95.9% | 95.8% | 95.7% | |||
| 95.89% | 95.67% | 95.67% | 95.67% | 0.9870 | ||
| 10 s | Stressed | 91.7% | 92.8% | 92.3% | ||
| Relaxed | 92.4% | 91.7% | 91.9% | |||
| 91.67% | 92.78% | 92.33% | 92.33% | 0.9619 |
| Signal | Stressed | Relaxed | Overall | |||||
|---|---|---|---|---|---|---|---|---|
| Length | Type | Precision | Recall | Precision | Recall | F1-Score | Accuracy | AUC |
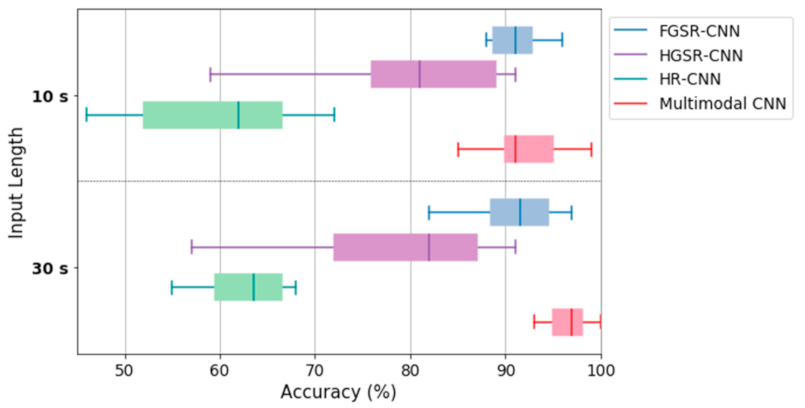
| 30 s | FGSR | 92.67% | 87.50% | 89.67% | 92.50% | 90.62% | 90.83% | 0.9091 |
| HGSR | 82.71% | 79.57% | 82.86% | 77.00% | 76.57% | 78.29% | 0.7825 | |
| HR | 67.25% | 59.75% | 64.25% | 66.00% | 61.00% | 62.50% | 0.6274 | |
| 3 types | 95.67% | 96.00% | 95.89% | 95.78% | 95.67% | 95.67% | 0.9870 | |
| 10 s | FGSR | 92.88% | 88.50% | 89.63% | 92.38% | 90.50% | 90.38% | 0.9101 |
| HGSR | 83.56% | 82.67% | 83.56% | 79.00% | 79.83% | 80.67% | 0.8141 | |
| HR | 63.86% | 61.86% | 55.57% | 57.43% | 56.71% | 59.57% | 0.5963 | |
| 3 types | 91.7% | 92.8% | 92.4% | 91.7% | 92.33% | 92.33% | 0.9619 |
| Signal | Input | Classification | Stressed | Relaxed | Overall | ||
|---|---|---|---|---|---|---|---|
| Length | Type | Model | Precision | Recall | Precision | Recall | Accuracy |
| 30 s | 1-D sequence | Multimodal 1-D CNN | 82.56% | 86.78% | 86.89% | 80.22% | 83.44% |
| Cont-RP | Multimodal VGG16 | 87.88% | 81.88% | 85.22% | 86.11% | 84.11% | |
| Cont-RP | Multimodal CNN | 95.67% | 96.00% | 95.89% | 95.78% | 95.67% | |
| 10 s | 1-D sequence | Multimodal 1-D CNN | 83.11% | 84.33% | 86.33% | 82.44% | 83.33% |
| Cont-RP | Multimodal VGG16 | 84.55% | 81.33% | 84.55% | 86.44% | 84.00% | |
| Cont-RP | Multimodal CNN | 91.7% | 92.8% | 92.4% | 91.7% | 92.33% |
| Method | Dataset | Used Signals | Input Length | Classifier | Accuracy |
|---|---|---|---|---|---|
| [30] | SRAD | FGSR, HR, RESP | 5 min | Logistic Regression | 81.39% |
| [40] | Self-collection | HGSR, HR, HRV, Breath Rate | 100 s | CNN | 92% |
| [41] | SRAD | FGSR, HGSR, HR | 30 s | SVM | 93% |
| Proposed | SRAD | FGSR, HGSR, HR | 30 s | Multimodal CNN | 95.67% |
| Proposed | SRAD | FGSR, HGSR, HR | 10 s | Multimodal CNN | 92.33% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Lee, H.; Shin, M. Driving Stress Detection Using Multimodal Convolutional Neural Networks with Nonlinear Representation of Short-Term Physiological Signals. Sensors 2021, 21, 2381. https://doi.org/10.3390/s21072381
Lee J, Lee H, Shin M. Driving Stress Detection Using Multimodal Convolutional Neural Networks with Nonlinear Representation of Short-Term Physiological Signals. Sensors. 2021; 21(7):2381. https://doi.org/10.3390/s21072381
Chicago/Turabian StyleLee, Jaewon, Hyeonjeong Lee, and Miyoung Shin. 2021. "Driving Stress Detection Using Multimodal Convolutional Neural Networks with Nonlinear Representation of Short-Term Physiological Signals" Sensors 21, no. 7: 2381. https://doi.org/10.3390/s21072381