
Bearing Fault Diagnosis Based on Energy Spectrum Statistics and Modified Mayfly Optimization Algorithm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Proposed Method
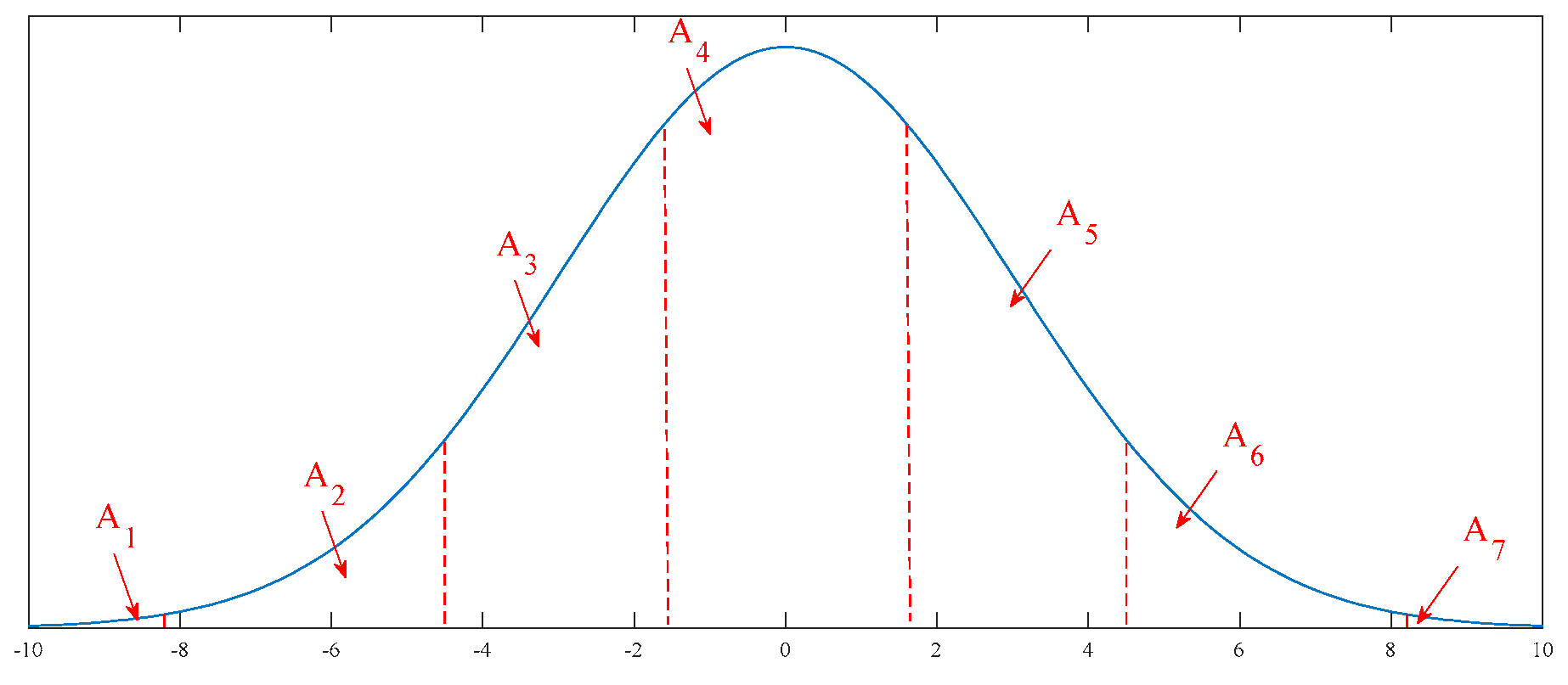
2.1. CV for Gaussian Data
- (1)
- The length can divide the whole energy spectrum into 50–100 sub-parts, and the center frequency for each sub-part is mark as .
- (2)
- The length of the window should be wide enough to contain at least three fault feature spectrum lines. Considering the unknown fault type, the length can be set as two times larger than the inner fault feature frequency.
- (3)
- The overlap ratio between two windows should be more than 50%. In this study, the overlap ratio is set as 80%.
2.2. The MMA Optimization Algorithm
- (1)
- Initialization: The populations of males and females are first initiated as and , respectively. The corresponding velocity is .
- (2)
- Males’ movement: The global best position for the current iteration is determined by the object function , which is marked as . The position for the next iteration is updated based on and the Cartesian distance between the personal element and the global best agent , which can be described aswhere corresponds to the agent in dimension at the current iteration and denotes its velocity. and denote the global and personal learning coefficient, respectively. and denote the Cartesian distance for global and personal, respectively. The velocity of the best agent in the current iteration is updated as , where denotes the nuptial dance and is a random variable located in .
- (3)
- Females’ movement: Compared with the movement of males, females will fly to males for breeding. Thus, their velocities are updated based on the Cartesian distance between themselves and the males, which can be described aswhere corresponds to the female agents and denotes the learning coefficient. is the distance sight coefficient, which is a constant. denotes the Cartesian distance between the male and female agents. The best female is arranged to match with the best male, and the second-best female is matched to the second-best male. Consequently, the positions of males are very important in MA.
- (4)
- Mating: Each couple produces two offspring in MA. One of them is added to the male population randomly, and the other is added to the female population.
- (5)
- Updating: The worst solution is replaced by the best solution, and the processes above are repeated until the stop criteria are met.
2.3. The Proposed Method
3. Case Study
3.1. Inner Fault Diagnosis
3.2. Ball Fault Diagnosis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, B.; Huang, Y.; Wang, D.; Yan, B.; Dong, D. A parameter-adaptive stochastic resonance based on whale optimization algorithm for weak signal detection for rotating machinery. Measurement 2019, 136, 658–667. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Z.; Wang, J.; Wang, J. Time–frequency analysis for bearing fault diagnosis using multiple Q-factor Gabor wavelets. ISA Trans. 2019, 87, 225–234. [Google Scholar] [CrossRef]
- Zhu, J.; Hu, T.; Jiang, B.; Yang, X. Intelligent bearing fault diagnosis using PCA–DBN framework. Neural Comput. Appl. 2020, 32, 10773–10781. [Google Scholar] [CrossRef]
- Adamczak, S.; Stępień, K.; Wrzochal, M. Comparative Study of Measurement Systems Used to Evaluate Vibrations of Rolling Bearings. Procedia Eng. 2017, 192, 971–975. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- He, S.; Liu, Y.; Chen, J.; Zi, Y. Wavelet transform based on inner product for fault diagnosis of rotating machinery. Smart Sens. Meas. Instrum. 2017, 26, 65–91. [Google Scholar] [CrossRef]
- Chen, J.; Wang, J.; Zhu, J.; Lee, T.H.; De Silva, C. Unsupervised Cross-domain Fault Diagnosis Using Feature Representation Alignment Networks for Rotating Machinery. IEEE/ASME Trans. Mechatronics 2020, 4435, 1–11. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics-A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Leite, V.C.M.N.; Da Silva, J.G.B.; Veloso, G.F.C.; Da Silva, L.E.B.; Lambert-Torres, G.; Bonaldi, E.L.; Oliveira, L.E.D.L.D. Detection of localized bearing faults in induction machines by spectral kurtosis and envelope analysis of stator current. IEEE Trans. Ind. Electron. 2015, 62, 1855–1865. [Google Scholar] [CrossRef]
- Sun, W.; Yang, G.A.; Chen, Q.; Palazoglu, A.; Feng, K. Fault diagnosis of rolling bearing based on wavelet transform and envelope spectrum correlation. J. Vib. Control 2013, 19, 924–941. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Z.; Cao, H.; Zhang, X. Subband averaging kurtogram with dual-tree complex wavelet packet transform for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2020, 142, 106755. [Google Scholar] [CrossRef]
- Moshrefzadeh, A.; Fasana, A. The Autogram: An effective approach for selecting the optimal demodulation band in rolling element bearings diagnosis. Mech. Syst. Signal Process. 2018, 105, 294–318. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zi, Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, M. An adaptive SK technique and its application for fault detection of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1750–1764. [Google Scholar] [CrossRef]
- Chen, J.; Zi, Y.; He, Z.; Yuan, J. Improved spectral kurtosis with adaptive redundant multiwavelet packet and its applications for rotating machinery fault detection. Meas. Sci. Technol. 2012, 23. [Google Scholar] [CrossRef]
- Tse, P.W.; Wang, D. The automatic selection of an optimal wavelet filter and its enhancement by the new sparsogram for bearing fault detection—Part 2 Mech. Syst. Signal Process. 2013, 40, 520–544. [Google Scholar] [CrossRef]
- Wang, D. An extension of the infograms to novel Bayesian inference for bearing fault feature identification. Mech. Syst. Signal Process. 2016, 80, 19–30. [Google Scholar] [CrossRef]
- Zhang, X.; Kang, J.; Zhao, J.; Zhao, J.; Teng, H. Rolling element bearings fault diagnosis based on correlated kurtosis kurtogram. J. Vibroengineering 2015, 17, 3023–3034. [Google Scholar]
- Xu, X.; Zhao, M.; Lin, J.; Lei, Y. Periodicity-based kurtogram for random impulse resistance. Meas. Sci. Technol. 2015, 26. [Google Scholar] [CrossRef]
- Barszcz, T.; Jabłoński, A. A novel method for the optimal band selection for vibration signal demodulation and comparison with the Kurtogram. Mech. Syst. Signal Process. 2011, 25, 431–451. [Google Scholar] [CrossRef]
- Borghesani, P.; Pennacchi, P.; Chatterton, S. The relationship between kurtosis- and envelope-based indexes for the diagnostic of rolling element bearings. Mech. Syst. Signal Process. 2014, 43, 25–43. [Google Scholar] [CrossRef]
- Xu, X.; Zhao, M.; Lin, J.; Lei, Y. Envelope harmonic-to-noise ratio for periodic impulses detection and its application to bearing diagnosis. Meas. 2016, 91, 385–397. [Google Scholar] [CrossRef]
- Qin, Y.; Jin, L.; Zhang, A.; He, B. Rolling Bearing Fault Diagnosis with Adaptive Harmonic Kurtosis and Improved Bat Algorithm. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Hebda-Sobkowicz, J.; Zimroz, R.; Pitera, M.; Wyłomańska, A. Informative frequency band selection in the presence of non-Gaussian noise—A novel approach based on the conditional variance statistic with application to bearing fault diagnosis. Mech. Syst. Signal Process. 2020, 145, 106971. [Google Scholar] [CrossRef]
- Jaworski, P.; Pitera, M. The 20-60-20 rule. Discret. Contin. Dyn. Syst. Ser. B 2016, 21, 1149–1166. [Google Scholar] [CrossRef] [Green Version]
- Jelito, D.; Pitera, M. New fat-tail normality test based on conditional second moments with applications to finance. Stat. Pap. 2020, 1–26. [Google Scholar] [CrossRef]
- Zervoudakis, K.; Tsafarakis, S. A mayfly optimization algorithm. Comput. Ind. Eng. 2020, 145, 106559. [Google Scholar] [CrossRef]
- Bearing Data Center—Seeded Fault Test Data. Available online: https://csegroups.case.edu/bearingdatacenter/home (accessed on 2 July 2020).
























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Chai, Y.; Liu, B.; Wang, Y. Bearing Fault Diagnosis Based on Energy Spectrum Statistics and Modified Mayfly Optimization Algorithm. Sensors 2021, 21, 2245. https://doi.org/10.3390/s21062245
Liu Y, Chai Y, Liu B, Wang Y. Bearing Fault Diagnosis Based on Energy Spectrum Statistics and Modified Mayfly Optimization Algorithm. Sensors. 2021; 21(6):2245. https://doi.org/10.3390/s21062245
Chicago/Turabian StyleLiu, Yuhu, Yi Chai, Bowen Liu, and Yiming Wang. 2021. "Bearing Fault Diagnosis Based on Energy Spectrum Statistics and Modified Mayfly Optimization Algorithm" Sensors 21, no. 6: 2245. https://doi.org/10.3390/s21062245