
A LiDAR Sensor-Based Spray Boom Height Detection Method and the Corresponding Experimental Validation

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
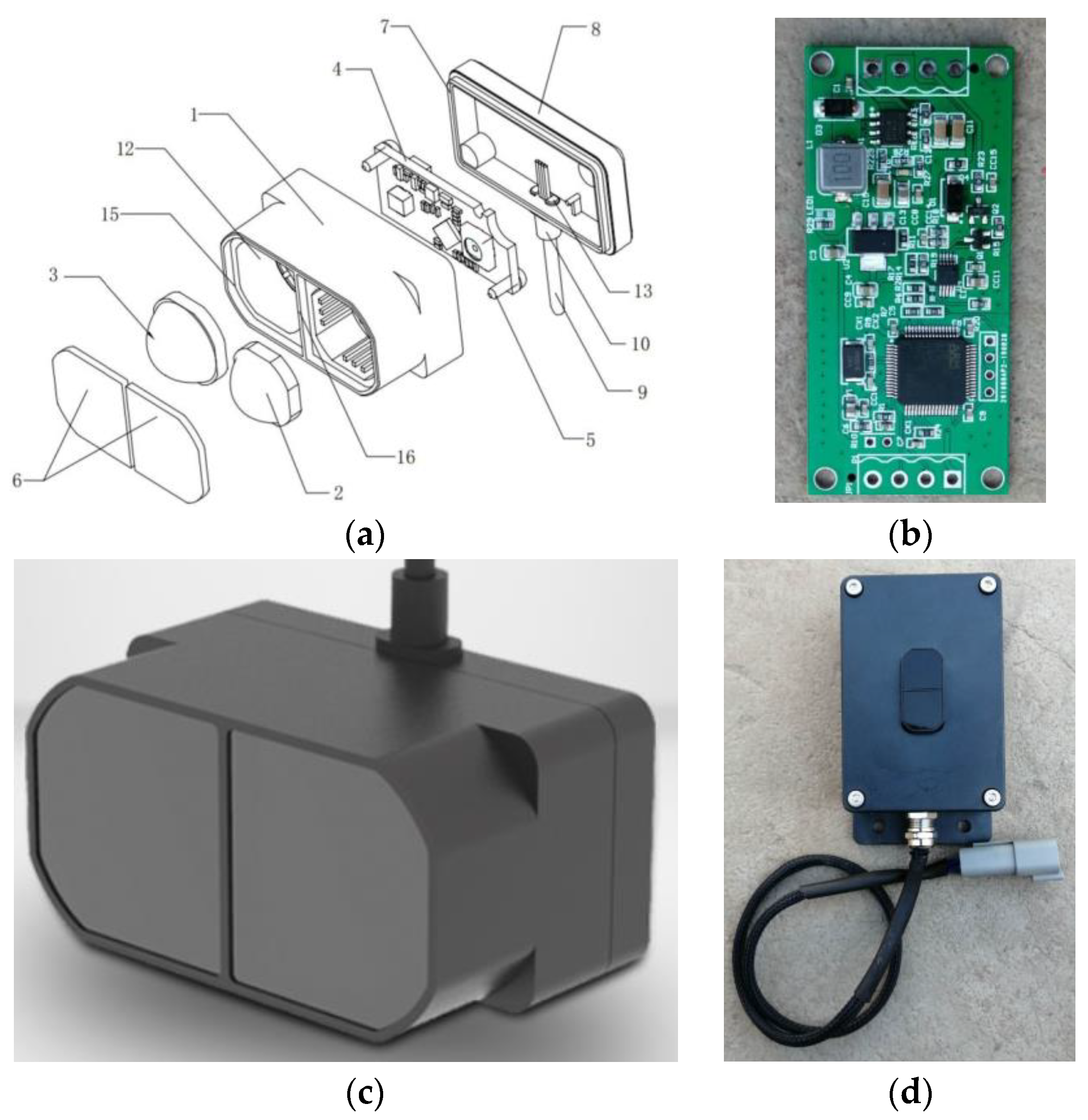
2.1. LiDAR Sensor Design
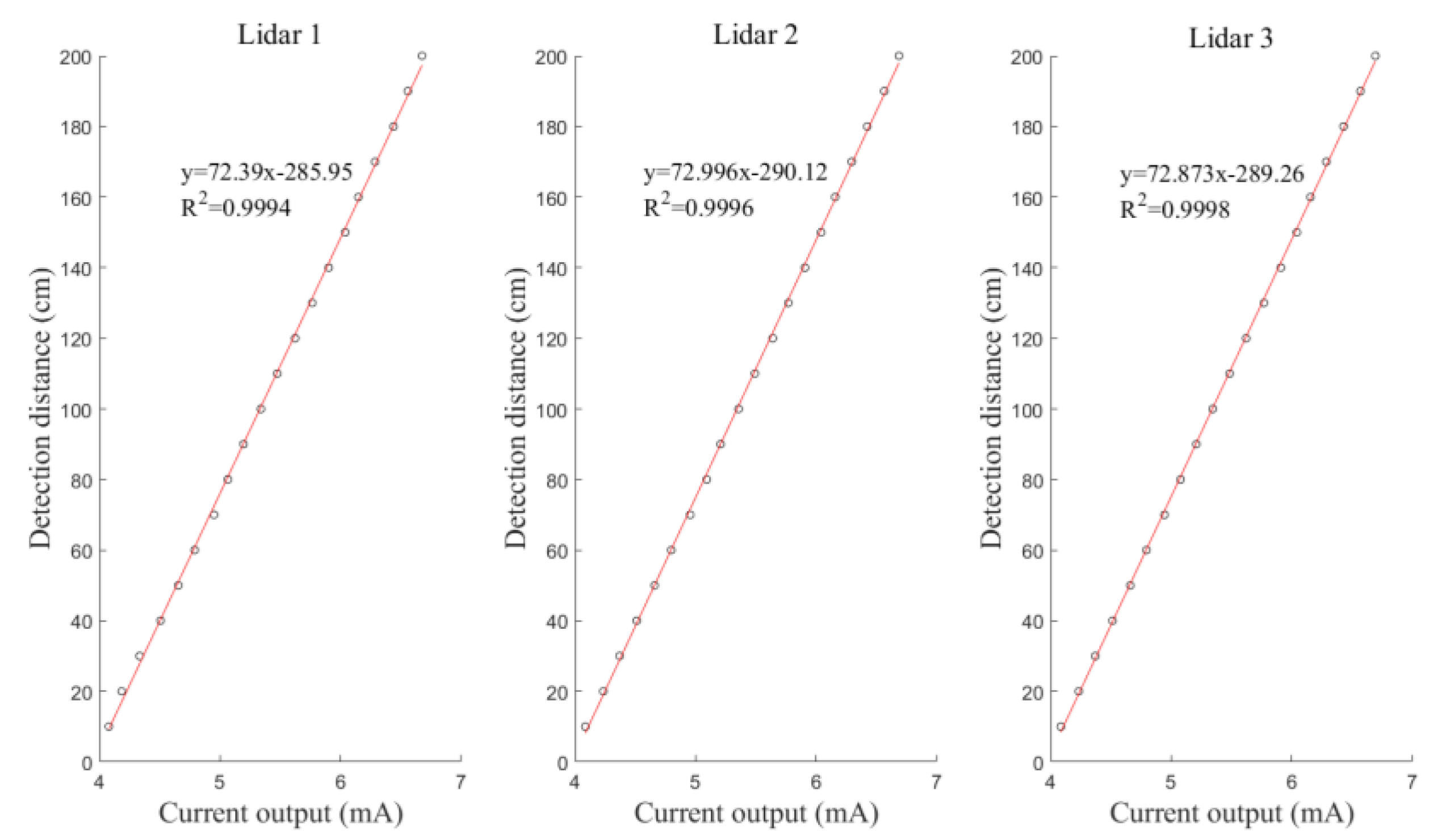
2.2. Sensor Check
2.3. Experimental Platform Design for Hb Detection
2.4. Step Detection Experiment
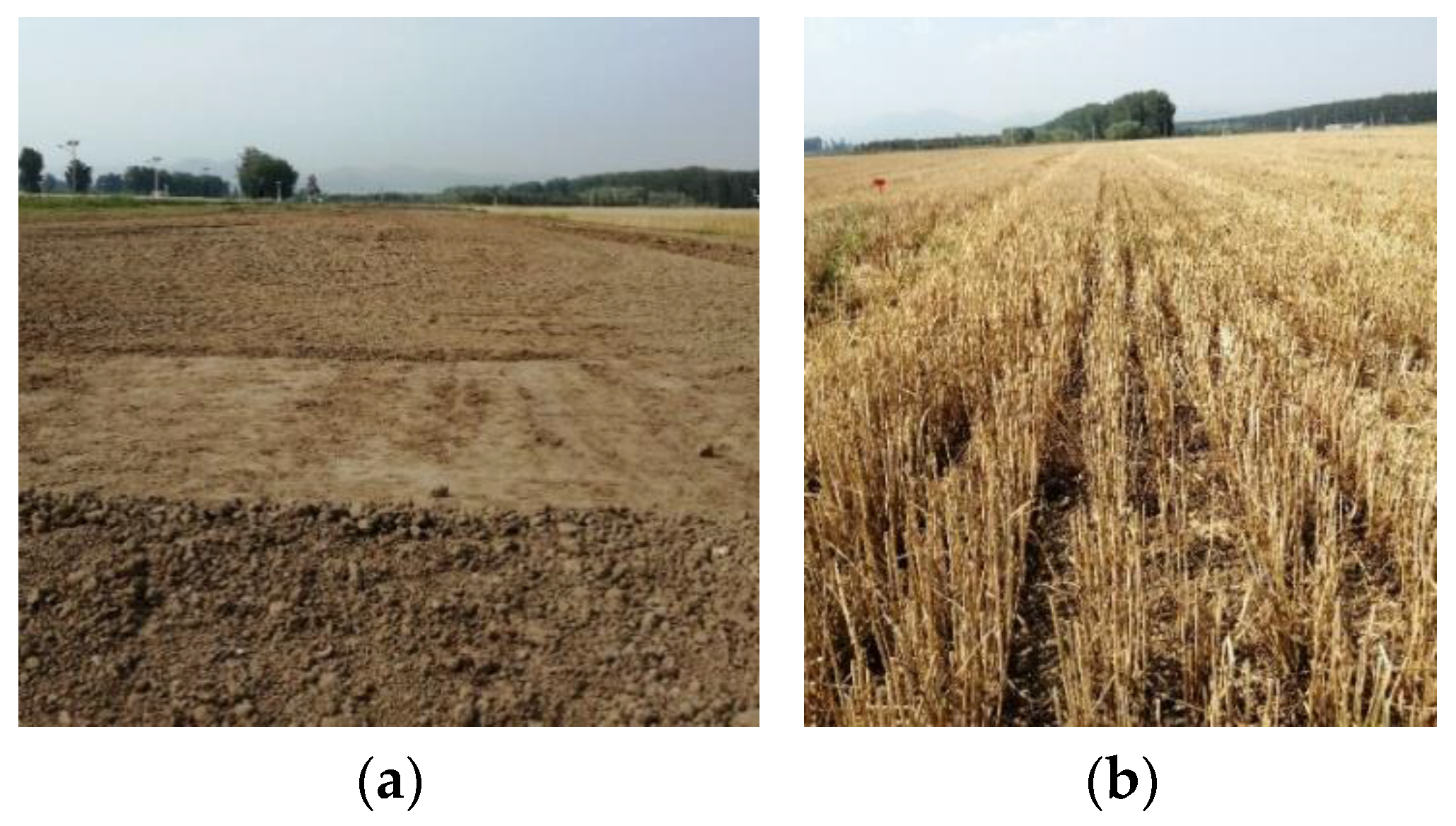
2.5. Field Ground Detection Experiment
2.6. Height Detection Experiment in a WS Field
2.7. Comparison of the LiDAR Sensor and an Ultrasonic Sensor
2.8. Acceleration Data Processing
3. Results
3.1. Sensor Check
3.2. Step Detection Experiment
3.3. Field Ground Detection Experiment
3.4. WS Height Detection Experiment
3.5. Comparison of the LiDAR and Ultrasonic Sensors
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, Y.J.; Chen, B.T.; Lyu, H.T.; Kang, F.; Jiang, S.J. Research progress of orchard plant protection mechanization technology and equipment in China. Trans. CSAE 2020, 36, 110–124. [Google Scholar]
- Feng, Y.N.; Pei, L.; Li, Y.; Chen, X.B.; Gong, Y.; Chen, X. Industry status and development trend of self-propelled boom spray. J. Chin. Agric. Mech. 2019, 40, 56–59. [Google Scholar]
- Zhuang, T.F.; Yang, X.J.; Dong, X.; Zhang, T.; Yan, H.R.; Sun, X. Research status and development trend of large self-propelled sprayer booms. Trans. Chin. Soc. Agric. Mach. 2018, 49, 189–198. [Google Scholar]
- Qiao, B.Y.; Ding, S.M.; Xue, X.Y.; Cui, L.F.; Zhou, Q.Q.; Zhang, Y.P. The research status and prospects on the structure of spray boom. J. Agric. Mech. Res. 2017, 39, 246–250. [Google Scholar]
- Wei, X.H.; Shao, J.; Miao, D.D.; Li, L.; Xie, X.W. Online Control System of Spray Boom Height and Balance. Trans. Chin. Soc. Agric. Mach. 2015, 46, 66–71. [Google Scholar]
- Balsari, P.; Gil, E.; Marucco, P.; Van De Zande, J.C.; Nuyttens, D.; Herbst, A.; Gallart, M. Field-crop-sprayer potential drift measured using test bench: Effects of boom height and nozzle type. Biosyst. Eng. 2017, 154, 3–13. [Google Scholar] [CrossRef] [Green Version]
- Nuyttens, D.; Zwertvaegher, I.K.; DeKeyser, D. Spray drift assessment of different application techniques using a drift test bench and comparison with other assessment methods. Biosyst. Eng. 2017, 154, 14–24. [Google Scholar] [CrossRef]
- Arvidsson, T.; Bergström, L.; Kreuger, J. Spray drift as influenced by meteorological and technical factors. Pest Manag. Sci. 2011, 67, 586–598. [Google Scholar] [CrossRef]
- Herbst, A.; Osteroth, H.-J.; Stendel, H. A novel method for testing automatic systems for controlling the spray boom height. Biosyst. Eng. 2018, 174, 115–125. [Google Scholar] [CrossRef]
- Lucas, M. Developing General Procedure to Quantitatively Analyze Boom Height Control Performance on Self-Propelled Agricultural Sprayers. Master’s Thesis, Iowa State University, Ames, IA, USA, 2018. [Google Scholar]
- Cui, L.F.; Xue, X.Y.; Le, F.X.; Qin, W.C.; Zhou, Q.Q. Experimental Study on Relationship Between Spray Boom Movement and Spray Deposition Distribution Variation Coefficient. J. Agric. Mech. Res. 2019, 41, 175–180. [Google Scholar]
- Ramon, H.; Missotten, B.; De Baerdemaeker, J. Spray Boom Motions and Spray Distribution: Part 2, Experimental Validation of the Mathematical Relation and Simulation Results. J. Agric. Eng. Res. 1997, 66, 31–39. [Google Scholar] [CrossRef]
- Langenakens, J.J.; Clijmans, L.; Ramon, H.; De Baerdemaeker, J. The Effects of Vertical Sprayer Boom Movements on the Uniformity of Spray Distribution. J. Agric. Eng. Res. 1999, 74, 281–291. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Ding, S.; Le, F. Development of a DSP-based electronic control system for the active spray boom suspension. Comput. Electron. Agric. 2019, 166, 105024. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Le, F.; Mao, H.; Ding, S. Design and experiment of electro hydraulic active suspension for controlling the rolling motion of spray boom. Int. J. Agric. Biol. Eng. 2019, 12, 72–81. [Google Scholar] [CrossRef]
- Ooms, D.; Ruter, R.; Lebeau, F.; Destain, M.-F. Impact of the horizontal movements of a sprayer boom on the longitudinal spray distribution in field conditions. Crop. Prot. 2003, 22, 813–820. [Google Scholar] [CrossRef]
- Ooms, D.; Lebeau, F.; Ruter, R.; Destain, M.-F. Measurements of the horizontal sprayer boom movements by sensor data fusion. Comput. Electron. Agric. 2002, 33, 139–162. [Google Scholar] [CrossRef] [Green Version]
- Jeon, H.Y.; Womac, A.R.; Gunn, J. Sprayer Boom Dynamic Effects on Application Uniformity. Trans. ASAE 2004, 47, 647–658. [Google Scholar] [CrossRef]
- Qiu, B.J.; He, Y.J.; Sheng, Y.H.; Yin, Z.H.; Deng, W.Q. Finite element modal analysis and structure optimization of spray boom. Trans. CSAM 2014, 45, 112–116. [Google Scholar]
- Wang, J.W.; Bai, H.C.; Sun, X.B.; Wang, J.L.; Tang, H.; Zhou, W.Q. Design and dynamic analysis of spray device for paddy field sprayer. Trans. CSAM 2019, 50, 69–79. [Google Scholar]
- Herbst, A.; Balsari, P.; Carpenter, P.I.; Cooper, S.E.; Glass, C.R.; Magri, B. Dynamic spray boom behaviour in practical conditions. Asp. Appl. Biol. 2010, 99, 15–20. [Google Scholar]
- Wang, S.; Dou, H.; Gao, Y.; Zhao, X.; Wang, X. Automatic Control System of Boom Height and Spray Test. In Proceedings of the 2018 ASABE Annual International Meeting, Detroit, MI, USA, 29 July–1 August 2018; p. 1. [Google Scholar] [CrossRef]
- De Magalhaes, L.P.; David, S.A.; Sousa, R.V.; Tabile, R.A. Suspension system in a spray boom using a fractional PID controller. Math. Comp. Modell. 2016, 1, 109–114. [Google Scholar]
- Tahmasebi, M.; Mailah, M.; Gohari, M.; Rahman, R.A. Vibration suppression of sprayer boom structure using active torque control and iterative learning. Part I: Modelling and control via simulation. J. Vib. Control. 2017, 24, 4689–4699. [Google Scholar] [CrossRef]
- Tahmasebi, M.; Gohari, M.; Mailah, M.; Rahman, R.A. Vibration suppression of sprayer boom structure using active torque control and iterative learning. Part II: Experimental implementation. J. Vib. Control. 2018, 24, 4740–4750. [Google Scholar] [CrossRef]
- Zhai, C.; Wang, X.; Guo, J.; Xu, S.; Ma, W. Influence of Velocity on Ultrasonic Probing of Orchard Tree Profile. Sens. Lett. 2013, 11, 1062–1068. [Google Scholar] [CrossRef]
- Fu, X.M.; Yan, H.R.; Dai, F.F.; Wu, P. Equipment for Crop Protection Spraying Equipment-Part 3: Test Methods for Volume/Hectare Adjustment Systems of Agricultural Hydraulic Pressure Sprayers; Techical Report GB/T 20183.3-2006; National Agricultural Machinery Standardization Technical Committee: Beijing, China, 2006. [Google Scholar]
- Chen, Y.; Wu, Z.; Zhao, B.; Fan, C.; Shi, S. Weed and Corn Seedling Detection in Field Based on Multi Feature Fusion and Support Vector Machine. Sensors 2020, 21, 212. [Google Scholar] [CrossRef] [PubMed]
- Sinaga, K.P.; Yang, M.-S. Unsupervised K-Means Clustering Algorithm. IEEE Access 2020, 8, 80716–80727. [Google Scholar] [CrossRef]
- Dou, H.; Zhai, C.; Chen, L.; Wang, S.; Wang, X. Field Variation Characteristics of Sprayer Boom Height Using a Newly Designed Boom Height Detection System. IEEE Access 2021, 9, 17148–17160. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Detection Index | Sensor Installation Location and Detection Method | Advantages | Disadvantages | References |
|---|---|---|---|---|---|
| Ultrasonic sensor | Boom height | The sensor was installed at both ends of the boom to detect the distance between the boom and the ground or canopy | It can directly detect the boom height | Susceptible to external interference | Cui et al. [14,15] Ooms et al. [16,17] Jeon et al. [18] |
| Tilt sensor | Boom tilt angle | The sensor was installed in the middle of the boom to measure the boom tilt angle | Easy to install | Need to convert the tilt angle into the boom height | Cui et al. [14,15] Qiu et al. [19] |
| Acceleration sensor | Boom displacement | The sensor was installed at both ends and the middle of the boom to measure the vertical and horizontal vibration displacement of the boom | It can analyse the vibration characteristics of the boom | High installation requirements | Wang et al. [20] Herbst et al. [21] |
| Touch Sensor | Boom height | The sensor was installed at both ends and the middle of the boom to detect the boom height through contact rod deformation | Fast response and less external interference | The sensor contact rod will damage the crop | Wang et al. [22] |
| displacement sensor | Boom displacement | The sensor was installed at the connection of the boom and the suspension to detect the displacement of the boom relative to the swing rod and the damper | It can detect the swing displacement of the boom | High installation requirements | Cui et al. [11] |
| Parameter | Value |
|---|---|
| Detection range | 0.1–12 m |
| Detection accuracy | ±1% |
| Range resolution | 1 cm |
| Signal receiving angle | 3.6° |
| Output frequency | 0–1000 Hz (adjustable) |
| Distance Detected | VLiDAR (m/s) | Mean Detection Error for Area a (%) | Mean Detection Error for Area b (%) | Mean Detection Error for Area c (%) |
|---|---|---|---|---|
| WS roots | 0.05 | 3.24 | 2.79 | 1.42 |
| 0.3 | 2.43 | 2.45 | 1.36 | |
| 0.6 | 2.43 | 3.67 | 0.68 | |
| 0.9 | 4.66 | 2.51 | 1.08 | |
| 1.2 | 2.63 | 2.51 | 2.44 | |
| WS canopy | 0.05 | 16.80 | 11.99 | 6.65 |
| 0.3 | 18.55 | 12.84 | 7.26 | |
| 0.6 | 18.37 | 11.48 | 7.65 | |
| 0.9 | 16.80 | 12.84 | 8.19 | |
| 1.2 | 20.02 | 11.31 | 8.50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dou, H.; Wang, S.; Zhai, C.; Chen, L.; Wang, X.; Zhao, X. A LiDAR Sensor-Based Spray Boom Height Detection Method and the Corresponding Experimental Validation. Sensors 2021, 21, 2107. https://doi.org/10.3390/s21062107
Dou H, Wang S, Zhai C, Chen L, Wang X, Zhao X. A LiDAR Sensor-Based Spray Boom Height Detection Method and the Corresponding Experimental Validation. Sensors. 2021; 21(6):2107. https://doi.org/10.3390/s21062107
Chicago/Turabian StyleDou, Hanjie, Songlin Wang, Changyuan Zhai, Liping Chen, Xiu Wang, and Xueguan Zhao. 2021. "A LiDAR Sensor-Based Spray Boom Height Detection Method and the Corresponding Experimental Validation" Sensors 21, no. 6: 2107. https://doi.org/10.3390/s21062107