
Self-Relative Evaluation Framework for EEG-Based Biometric Systems


Abstract
:1. Introduction
2. Materials and Methods
2.1. Framework Description
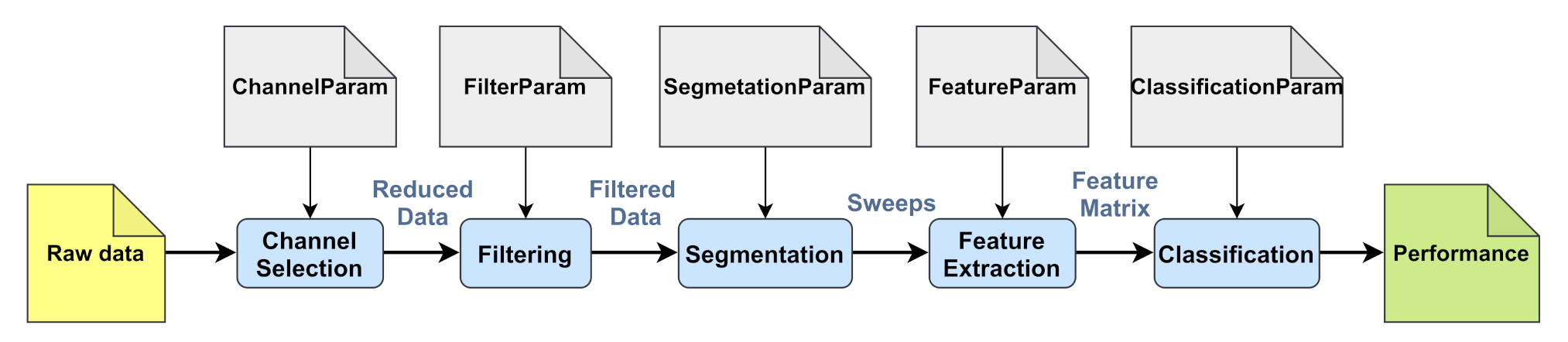
- Parametric representation of the system: This presents the parametric representation of the designed EEG-based biometric system through the selected processing techniques.
- Identity information distribution: This creates different quality levels of identity information contained in EEG signals through processing techniques.
- Openness condition: This simulates the enrollment of a growing number of labeled subjects through steps. In each step, the system updates the additional subject classes using a class-update strategy.
- Performance evaluation: This defines the self-relative metrics to measure the performance degradation resulting from the openness condition.
2.2. Parametric Representation of the System
- Channel selection: selection of a set of H channels (an H-channel EEG-based person identification system is available).
- Filtering: Signals are enhanced through two filters:
- Filter CAR: Common average referencing (CAR) spatial filtering, applied to reduce artifacts related to unsuitable reference choices or unexpected reference variations [33].
- Low-pass filter: Butterworth filter, used to filter a range of frequency pass bands in EEG signals.
- Segmentation: Static overlapped segmentation by dividing each EEG signal of duration V into segments of duration v, with an overlapping factor of . The total number of segments per class of subject N is calculated by .
- Feature extraction: Burg’s coefficients of an auto-regressive model of order Q are used as features. The coefficients extracted from each EEG channel are then concatenated to form a single d-dimensional feature vector to represent the whole segment. The autoregressive model is described by a linear difference equation as follows:where Q is a constant, Q stands for the number of parameters of the AR model and denotes a white noise input. Burg’s method is used to estimate the AR model parameters.
- Classification: A multi-classification problem of E classes using feature vectors (ID vectors), where E is the total number of subjects used in learning and N is the total number of feature vectors per subject class. The K-nearest neighbor classifier (KNN) is used to train and test the model through cross-validation. The KNN classifier relies on distance and similarity measures between training and test sets: a test input is assigned to the most common label among the k most similar training inputs.
2.3. Identity Information Distribution
2.4. Openness Condition
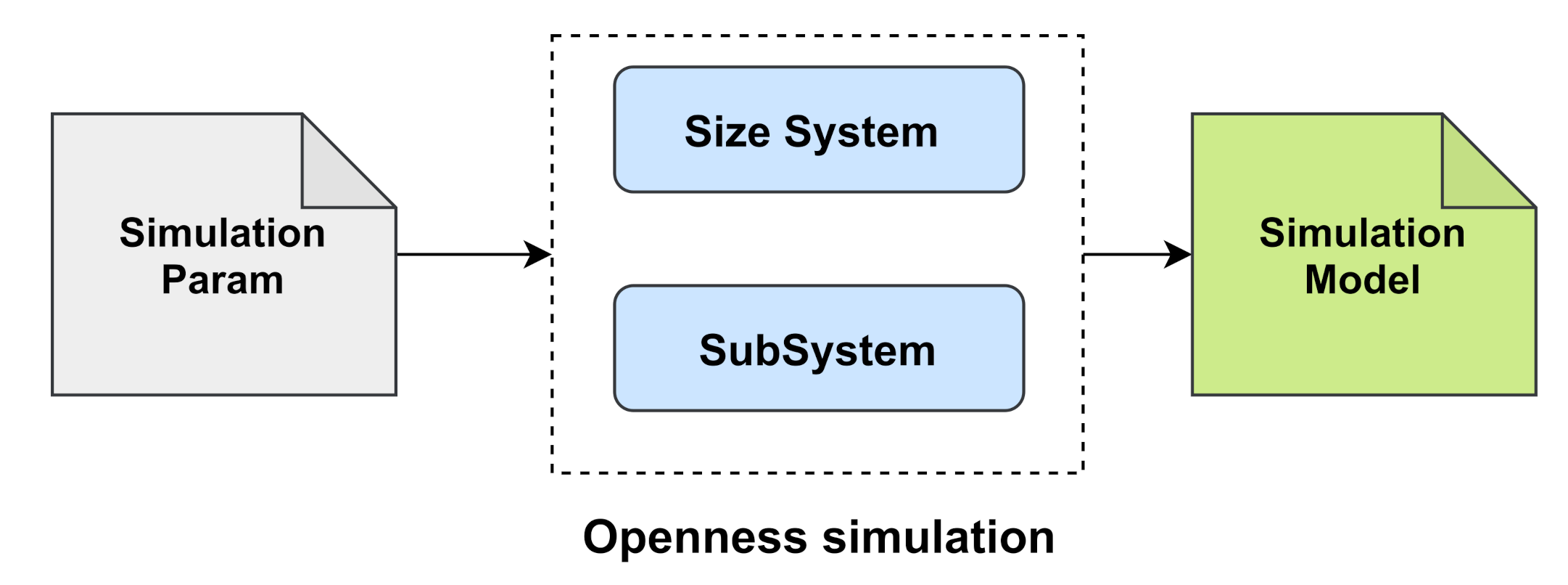
2.4.1. Openness Simulation
- A size system component, which determines the number of subjects included in the system at each step of openness.Let R be the total number of steps and the number of subjects at step n, . Formally, we noteincludes random independent variables with a common distribution F. is chosen to simulate a random number of subjects added in each step for a normally increasing number of subjects. Simulation-Param in Figure 3 provides the necessary parameters to generate in addition to the assigned values to and .
- A subsystem component, which determines the set of subject labels included in the system at each step of openness.Let be the set of subject labels in step n, where . Moreover, the openness condition means according to Algorithm 1.
| Algorithm 1 Determination of subsystem labels |
Input T: size system component to determinate the number of subjects at each step (R steps). U: label set for all subjects of the dataset labeled from 1 to E. Output L: subsystem component to determinate the set of labels at each step. START 1: 2: for 3: 4: 5: END |
2.4.2. Class-Update Strategy
- The set of training labeled instances , is the instance in the feature space, and is the corresponding subject label.
- The set of testing instances , where is a testing instance in the feature space. Besides this, are the corresponding subject labels for to be predicted.
- is used to train the biometric system and learn the classification model (repetitive batch learning).
- Through a close set test, is predicted from test instances using the learned model : .
- The classification accuracy is learned using the confusion matrix between and .
2.5. Performance Evaluation
| Algorithm 2 Self relative evaluation |
Input data: EEG signals of all subjects available in the dataset. P: parametric representation of the designed EEG-based biometric system. : range of filter orders. : range of frequency sub-bands. S: openness simulation model. update: the class-update strategy. Output : The mean vector of openness accuracy per each distribution of identity information. : The self-relative evaluation metrics. START 1: identity-information-distribution 2: For k=1, ...m*r 3: openness-condition 4: performance-evaluation END |
- Local relative loss (LRL): the mean degradation in performance between every two successive steps of the openness condition compared to the moving reference step .The condition of performance degradation for local relative loss is .
- Global relative loss (GRL): the mean degradation in performance of each step j regarding the first step of the openness condition (fixed reference step).The condition of performance degradation for global relative loss is .
3. Datasets and Experiments
3.1. Datasets
3.2. Experiments
3.2.1. Parametric Representation of the Designed System
3.2.2. Identity Information Distribution
3.2.3. Openness Condition
4. Results and Discussion
4.1. Framework General Evaluation
4.2. Diversity in Identity Information Distributions
4.3. Openness Condition: Comparison between Static and Self-Relative Evaluations
4.3.1. Static Evaluation of the First Boundary Step
- When the accuracy for filter 1, the related including 38 configurations of the designed system in the first step.
- When the accuracy for filter 2, the related including 27 configurations of the designed system in the first step.
4.3.2. Static Evaluation of the Last Boundary Step
4.4. Framework Decision Making
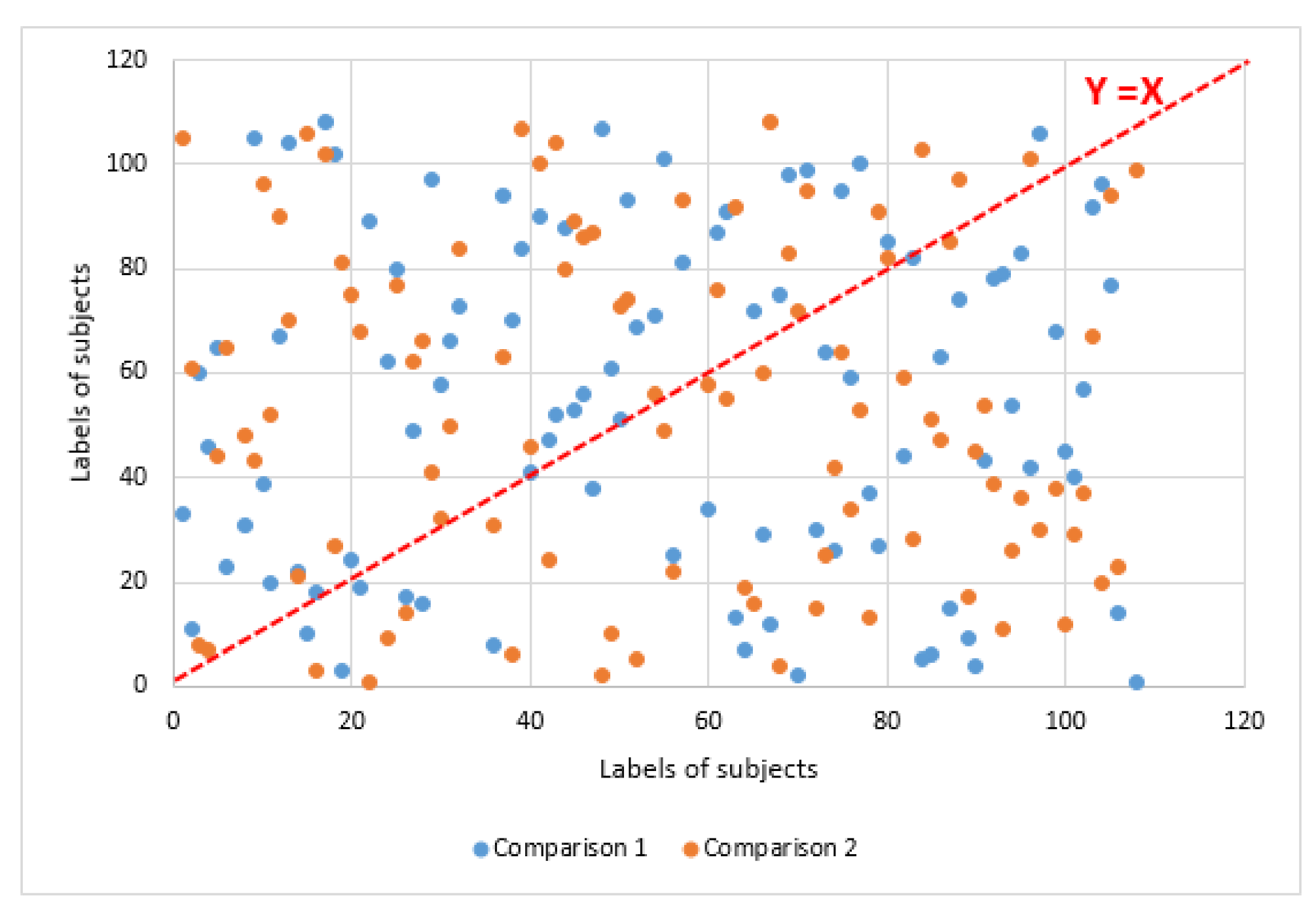
4.5. Separability of Classifiers
5. Conclusions
- Target input parameters of processing techniques allow the generation of several quality levels of identity information with diversity. This diversity varies according to the selected parameters and methods.
- The openness condition evaluated with a fixed reference step (first step) shows that the degradation in performance is more important than moving reference steps, which highlights the commutative effect of openness.
- The openness condition helps to distinguish between different identity information levels that are significantly equivalent at a given fixed step. This distinction is made by selecting the best associated self-relative evaluation.
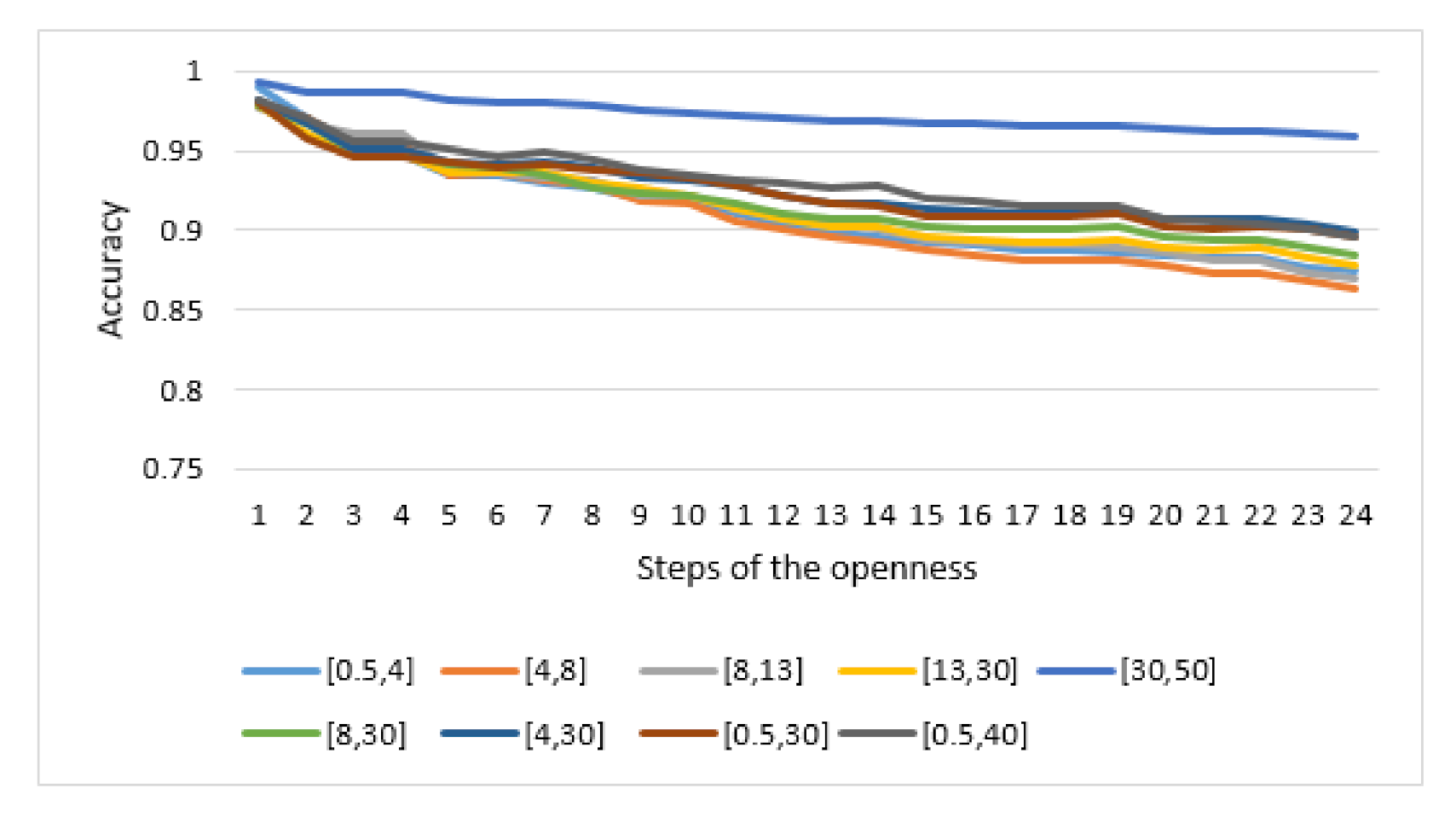
- The Gamma band outperformed all the other frequency bands, and was thus a potential source of identity information. This result is consistent with previous works [12,38] in which the highest recognition rates were observed in the Gamma band. In this paper, the additional result obtained through the self-relative evaluation was that the Gamma band had the highest ability to carry the openness condition (with an increasing number of subjects from to via steps using a repetitive batch learning class-update strategy) with an optimum GRL of 1.07%.
- The openness condition depends on the ability of the chosen classifier to set and extend boundaries between classes when increasing the number of subjects enrolled in the system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bidgoly, A.J.; Bidgoly, H.J.; Arezoumand, Z. A survey on methods and challenges in EEG based authentication. Comput. Secur. 2020, 93, 101788. [Google Scholar] [CrossRef]
- Campisi, P.; Scarano, G.; Babiloni, F.; Fallani, F.D.; Colonnese, S.; Maiorana, E.; Forastiere, L. Brain waves based user recognition using the “eyes closed resting conditions” protocol. In Proceedings of the 2011 IEEE International Workshop on Information Forensics and Security, Iguacu Falls, Brazil, 29 November–2 December 2011; pp. 1–6. [Google Scholar]
- La Rocca, D.; Campisi, P.; Scarano, G. EEG biometrics for individual recognition in resting state with closed eyes. In Proceedings of the 2012 BIOSIG-Proceedings of the International Conference of Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 6–7 September 2012; pp. 1–12. [Google Scholar]
- La Rocca, D.; Campisi, P.; Scarano, G. On the Repeatability of EEG Features in a Biometric Recognition Framework using a Resting State Protocol. In Proceedings of the BIOSIGNALS, Barcelona, Spain, 11–14 February 2013; pp. 419–428. [Google Scholar]
- Zúquete, A.; Quintela, B.; da Silva Cunha, J.P. Biometric Authentication using Brain Responses to Visual Stimuli. In Proceedings of the BIOSIGNALS, Valencia, Spain, 20–23 January 2010; pp. 103–112. [Google Scholar]
- Das, R.; Maiorana, E.; Campisi, P. EEG biometrics using visual stimuli: A longitudinal study. IEEE Signal Process. Lett. 2016, 23, 341–345. [Google Scholar] [CrossRef]
- Palaniappan, R.; Mandic, D.P. EEG based biometric framework for automatic identity verification. J. Vlsi Signal Process. Syst. Signal Image Video Technol. 2007, 49, 243–250. [Google Scholar] [CrossRef]
- Sun, S. Multitask learning for EEG-based biometrics. In Proceedings of the 2008 19th International Conference on Pattern Recognition, Tampa, FL, USA, 8–11 December 2008; pp. 1–4. [Google Scholar]
- López-Gil, J.M.; Virgili-Gomá, J.; Gil, R.; Guilera, T.; Batalla, I.; Soler-González, J.; García, R. Method for improving EEG based emotion recognition by combining it with synchronized biometric and eye tracking technologies in a non-invasive and low cost way. Front. Comput. Neurosci. 2016, 10, 85. [Google Scholar] [PubMed] [Green Version]
- Tulceanu, V. Comprehensive brainwave authentication using emotional stimuli. In Proceedings of the 2012 Proceedings of the 20th European Signal Processing Conference (EUSIPCO), Bucharest, Romania, 27–31 August 2012; pp. 1772–1776. [Google Scholar]
- Moctezuma, L.A.; Molinas, M. Towards a minimal EEG channel array for a biometric system using resting-state and a genetic algorithm for channel selection. Sci. RepoRtS 2020, 10, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Thomas, K.P.; Vinod, A.P. EEG-based biometric authentication using gamma band power during rest state. Circuits Syst. Signal Process. 2018, 37, 277–289. [Google Scholar] [CrossRef]
- Maiorana, E.; La Rocca, D.; Campisi, P. On the permanence of EEG signals for biometric recognition. IEEE Trans. Inf. Forensics Secur. 2015, 11, 163–175. [Google Scholar] [CrossRef]
- Yang, S.; Deravi, F.; Hoque, S. Task sensitivity in EEG biometric recognition. Pattern Anal. Appl. 2018, 21, 105–117. [Google Scholar] [CrossRef] [Green Version]
- Damaševičius, R.; Maskeliūnas, R.; Kazanavičius, E.; Woźniak, M. Combining cryptography with EEG biometrics. Comput. Intell. Neurosci. 2018, 2018. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, P.; Tran, D.; Huang, X.; Sharma, D. A proposed feature extraction method for EEG-based person identification. In Proceedings of the International Conference on Artificial Intelligence (ICAI). The Steering Committee of The World Congress in Computer Science, Computer, Las Vegas, NV, USA, 16–19 July 2012; p. 1. [Google Scholar]
- Poulos, M.; Rangoussi, M.; Alexandris, N.; Evangelou, A. Person identification from the EEG using nonlinear signal classification. Methods Inf. Med. 2002, 41, 64–75. [Google Scholar] [PubMed] [Green Version]
- Campisi, P.; La Rocca, D. Brain waves for automatic biometric-based user recognition. IEEE Trans. Inf. Forensics Secur. 2014, 9, 782–800. [Google Scholar] [CrossRef]
- Mohammadi, G.; Shoushtari, P.; Molaee Ardekani, B.; Shamsollahi, M.B. Person identification by using AR model for EEG signals. In Proceeding of the World Academy of Science, Engineering and Technology, Prague, Czech Republic, 24–26 February 2006; pp. 281–285. [Google Scholar]
- Han, C.; Kim, S.; Yoon, H.; Lee, W.; Park, C.; Kim, K.; Park, K. Contrast between spectral and connectivity features for electroencephalography based authentication. In Proceedings of the World Congress on Medical Physics and Biomedical Engineering, Toronto, ON, Canada, 7–12 June 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1224–1227. [Google Scholar]
- Gui, Q.; Jin, Z.; Xu, W. Exploring EEG-based biometrics for user identification and authentication. In Proceedings of the 2014 IEEE Signal Processing in Medicine and Biology Symposium (SPMB), Philadelphia, PA, USA, 13 December 2014; pp. 1–6. [Google Scholar]
- La Rocca, D.; Campisi, P.; Vegso, B.; Cserti, P.; Kozmann, G.; Babiloni, F.; Fallani, F.D.V. Human brain distinctiveness based on EEG spectral coherence connectivity. IEEE Trans. Biomed. Eng. 2014, 61, 2406–2412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phung, D.Q.; Tran, D.; Ma, W.; Nguyen, P.; Pham, T. Using Shannon Entropy as EEG Signal Feature for Fast Person Identification. In Proceedings of the ESANN, Bruges, Belgium, 23–25 April 2014; Volume 4, pp. 413–418. [Google Scholar]
- Jayarathne, I.; Cohen, M.; Amarakeerthi, S. BrainID: Development of an EEG-based biometric authentication system. In Proceedings of the 2016 IEEE 7th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 13–15 October 2016; pp. 1–6. [Google Scholar]
- Poulos, M.; Rangoussi, M.; Chrissikopoulos, V.; Evangelou, A. Person identification based on parametric processing of the EEG. In Proceedings of the ICECS’99, Proceedings of ICECS’99, 6th IEEE International Conference on Electronics, Circuits and Systems (Cat. No. 99EX357), Paphos, Cyprus, 5–8 September 2016; Volume 1, pp. 283–286. [Google Scholar]
- Kaewwit, C.; Lursinsap, C.; Sophatsathit, P. High accuracy EEG biometrics identification using ICA and AR model. J. Inf. Commun. Technol. 2017, 16, 354–373. [Google Scholar]
- Su, F.; Xia, L.; Cai, A.; Ma, J. Evaluation of recording factors in EEG-based personal identification: A vital step in real implementations. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 3861–3866. [Google Scholar]
- Maiorana, E.; Solé-Casals, J.; Campisi, P. EEG signal preprocessing for biometric recognition. Mach. Vis. Appl. 2016, 27, 1351–1360. [Google Scholar] [CrossRef]
- Hine, G.E.; Maiorana, E.; Campisi, P. Resting-state EEG: A study on its non-stationarity for biometric applications. In Proceedings of the 2017 International Conference of the Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 20–22 September 2017; pp. 1–5. [Google Scholar]
- Boubakeur, M.R.; Wang, G.; Liu, K.; Benatchba, K. Evaluation of Identity Information Loss in EEG-Based Biometric Systems. In Proceedings of the International Conference on Brain Informatics, Haikou, China, 13–15 December 2019; Springer: Cham, Switzerland, 2019; pp. 201–211. [Google Scholar]
- Fraschini, M.; Meli, M.; Demuru, M.; Didaci, L.; Barberini, L. EEG Fingerprints under Naturalistic Viewing Using a Portable Device. Sensors 2020, 20, 6565. [Google Scholar] [CrossRef] [PubMed]
- Goldberger, A.L.; Amaral, L.A.; Glass, L.; Hausdorff, J.M.; Ivanov, P.C.; Mark, R.G.; Mietus, J.E.; Moody, G.B.; Peng, C.K.; Stanley, H.E. PhysioBank, PhysioToolkit, and PhysioNet: Components of a new research resource for complex physiologic signals. Circulation 2000, 101, e215–e220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McFarland, D.J.; McCane, L.M.; David, S.V.; Wolpaw, J.R. Spatial filter selection for EEG-based communication. Electroencephalogr. Clin. Neurophysiol. 1997, 103, 386–394. [Google Scholar] [CrossRef]
- Masana, M.; Liu, X.; Twardowski, B.; Menta, M.; Bagdanov, A.D.; van de Weijer, J. Class-incremental learning: Survey and performance evaluation. arXiv 2020, arXiv:2010.15277. [Google Scholar]
- Thórisson, K.R.; Bieger, J.; Li, X.; Wang, P. Cumulative learning. In Proceedings of the International Conference on Artificial General Intelligence, Shenzhen, China, 6–9 August 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 198–208. [Google Scholar]
- Hoi, S.C.; Sahoo, D.; Lu, J.; Zhao, P. Online learning: A comprehensive survey. arXiv 2018, arXiv:1802.02871. [Google Scholar]
- Bendale, A.; Boult, T. Towards open world recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1893–1902. [Google Scholar]
- Fraschini, M.; Hillebrand, A.; Demuru, M.; Didaci, L.; Marcialis, G.L. An EEG-based biometric system using eigenvector centrality in resting state brain networks. IEEE Signal Process. Lett. 2014, 22, 666–670. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Information |
|---|---|
| Mental task | EC |
| Number of subjects | 108 |
| Number of channels | 64 |
| Sampling frequency | 160 HZ |
| Signal time length | 60 s |
| Steps | Method “ID” | Input Parameters |
|---|---|---|
| Channel selection | Set selection | - Set of H channels (see Figure 6). |
| Filtering | Filter CAR | - Number of selected channels (). |
| Butterworth | - Order of filter O. | |
| - Sampling frequency ( HZ). | ||
| -The selected frequency sub-band f. | ||
| Segmentation | - Size of segment (). | |
| Static overlapped | - Overlapping percentage (). | |
| segmentation | - Number of selected channels (). | |
| - Sampling frequency ( HZ). | ||
| Feature Extraction | AR features | - Order of features (). |
| - Coefficients’ estimation (Burg). | ||
| Classifier | KNN | - Number of neighbors (). |
| - Type of distance (Euclidean). | ||
| - Cross-validation (Kfold = 3). |
| Feature Space Description | Information |
|---|---|
| Number of classes, E | 108 |
| Number of feature vectors per class, N | 19 |
| Dimension of feature vector, d | 228 |
| Filter Order | 1 | 2 | 3 | 4 | 5 | Power |
|---|---|---|---|---|---|---|
| Filter 1 | 5.03 | 3.19 | 4.12 | 3.65 | 6.15 | 1.9 |
| Filter 2 | 3.34 | 3.74 | 8.60 | 13.12 | 21.18 | 6.3 |
| Sub-Bands | [0.5, 4] | [4, 8] | [8, 13] | [13, 30] | [30, 50] | [8, 30] | [4, 30] | [0.5, 30] | [0.5, 40] | Power |
|---|---|---|---|---|---|---|---|---|---|---|
| Filter 1 | 4.73 | 4.63 | 4.54 | 5.01 | 1.94 | 4.83 | 4.97 | 4.49 | 4.70 | 2.6 |
| Filter 2 | 8.70 | 8.55 | 11.99 | 12.12 | 5.77 | 11.22 | 12.10 | 10.39 | 9.13 | 2.1 |
| Parts | Static Evaluation | Self-Relative Evaluation |
|---|---|---|
| System | Parametric representation P | Parametric representation P |
| Condition | Fixed number of labeled subjects | Openness condition , update |
| Identity information | Fixed pair of parameters | Parameters range in and |
| Performance | Maximal accuracy | Minimal GRL |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boubakeur, M.R.; Wang, G. Self-Relative Evaluation Framework for EEG-Based Biometric Systems. Sensors 2021, 21, 2097. https://doi.org/10.3390/s21062097
Boubakeur MR, Wang G. Self-Relative Evaluation Framework for EEG-Based Biometric Systems. Sensors. 2021; 21(6):2097. https://doi.org/10.3390/s21062097
Chicago/Turabian StyleBoubakeur, Meriem Romaissa, and Guoyin Wang. 2021. "Self-Relative Evaluation Framework for EEG-Based Biometric Systems" Sensors 21, no. 6: 2097. https://doi.org/10.3390/s21062097