
The Design and Simulation of a 16-Sensors Plantar Pressure Insole Layout for Different Applications: From Sports to Clinics, a Pilot Study





Abstract
:1. Introduction
2. Material and Methods
2.1. Subjects
2.2. Instrumental Protocol
- gait: initial contact was detected as the first instant when the heel pressure signal exceeds its threshold (defined during the zeroing process); the toe-off event was detected as the first instant when the hallux pressure signal goes below its threshold. The heel marker trajectory was also used in order to confirm the step detection.
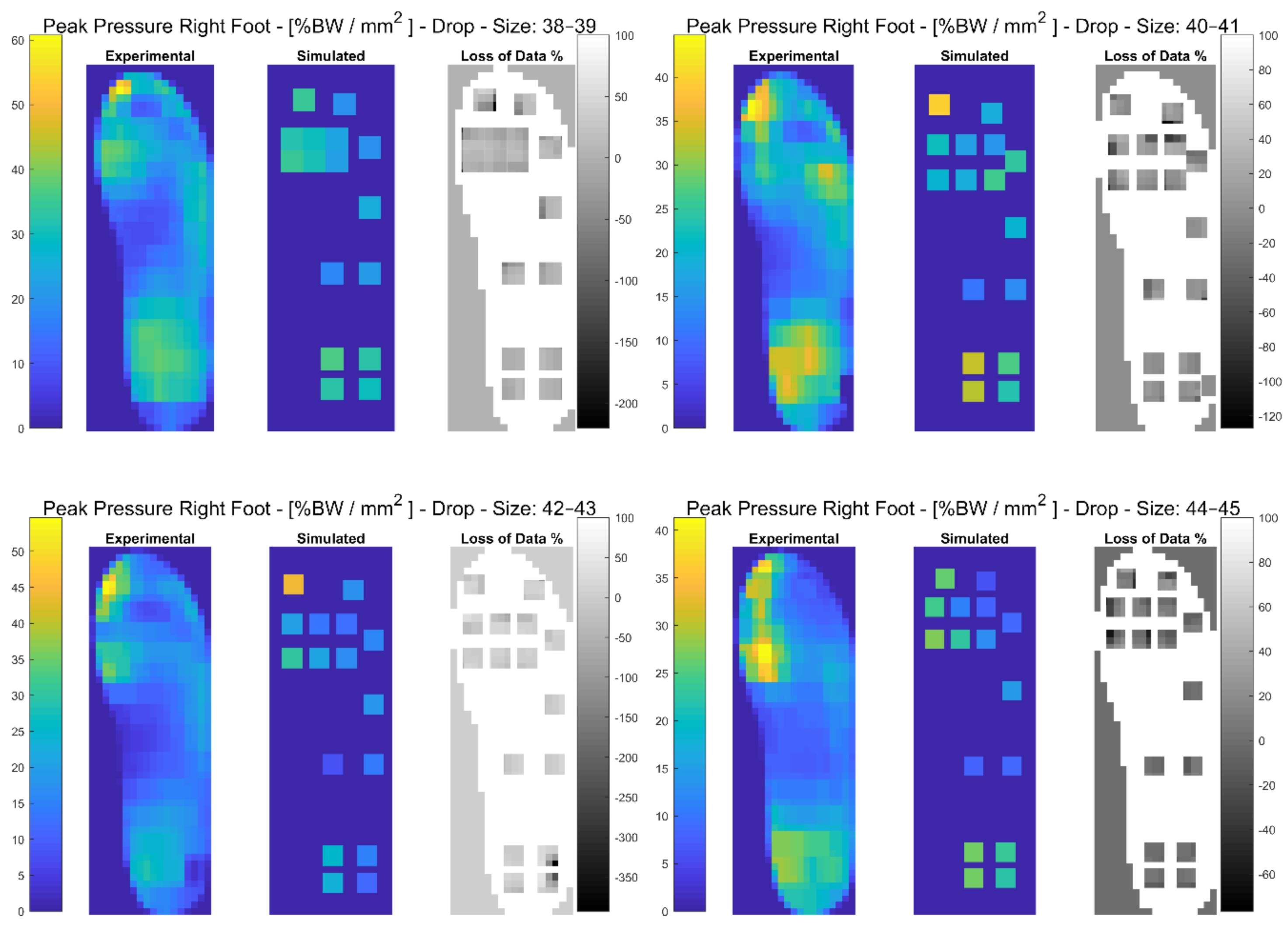
- drop: the subject stood in a balanced position near the front edge of the 32 cm platform with the foot of the testing leg completely off the platform and suspended over the floor, with the heel of that foot resting against the front of the platform. This placed the subject’s center of mass as far forward as possible in an attempt to limit horizontal motion. The subject’s weight was supported fully on the platform by the non-testing leg. To initiate movement, the subject weight-shifted forward and dropped vertically, while attempting to land in a balanced position on the testing leg. Subjects were instructed to “fall” from the platform without jumping or lowering their body prior to leaving the platform [26]. The beginning of the task was detected as the first instant when the hallux pressure signal goes below the threshold (of the last leg in contact with the platform). The end of the task was detected two seconds after landing. The heel marker trajectory together with the force plate was also used in order to confirm the task detection.
- lifting: Each subject performed 3 consecutive squat lifts carrying 16 kg for the male cohort and 8 kg for the female cohort, respectively, from the floor to 73 cm height. The task was divided into five phases:
- ○
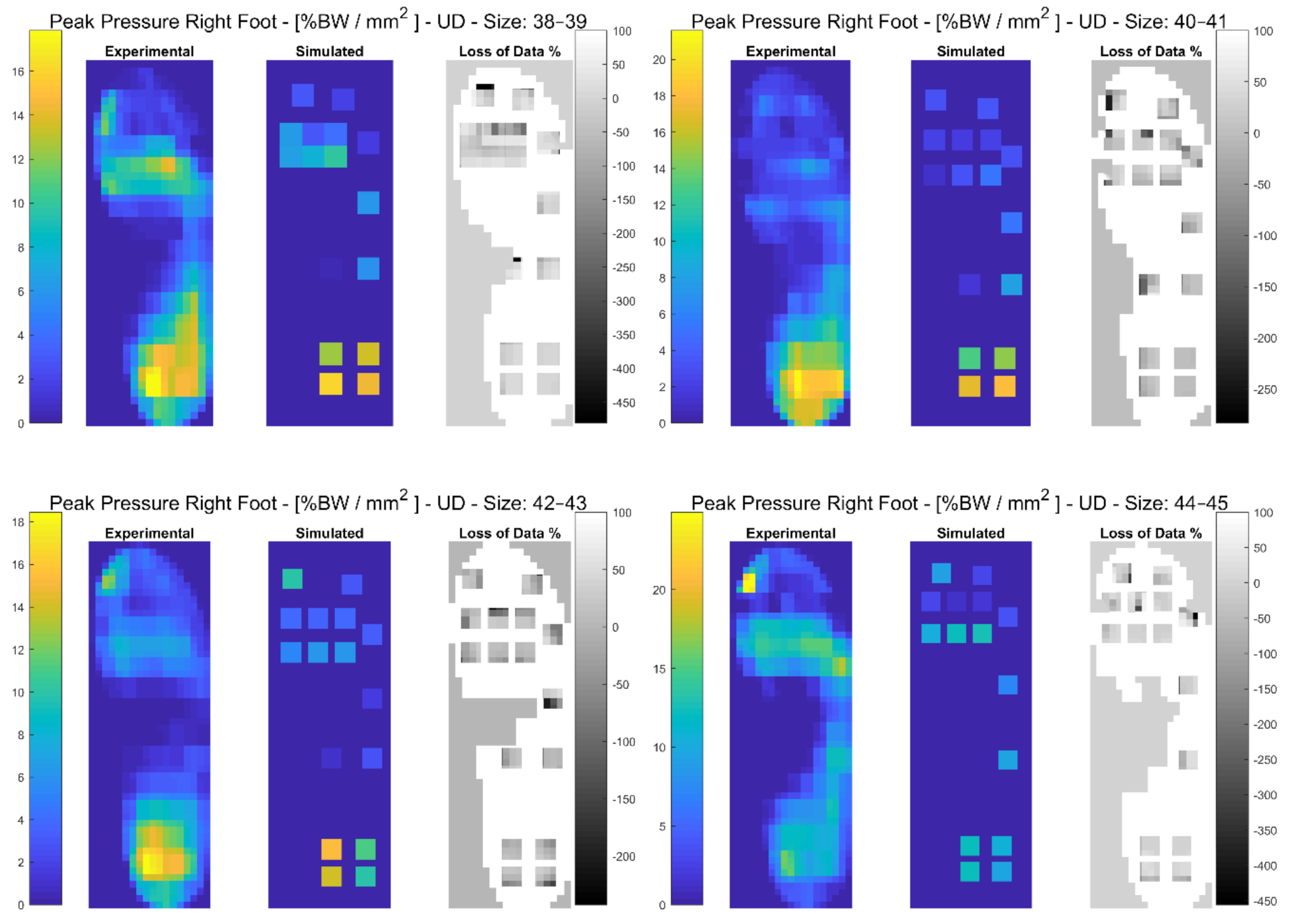
- Unloaded descending (UD): the subject takes the weight that is placed on the floor;
- ○
- Loaded ascending (LA): the subject grabs the weight and lifts it onto the support;
- ○
- Leave and peak: the subject places the weight on the support and grabs it again to start the next phase (this phase was not analyzed);
- ○
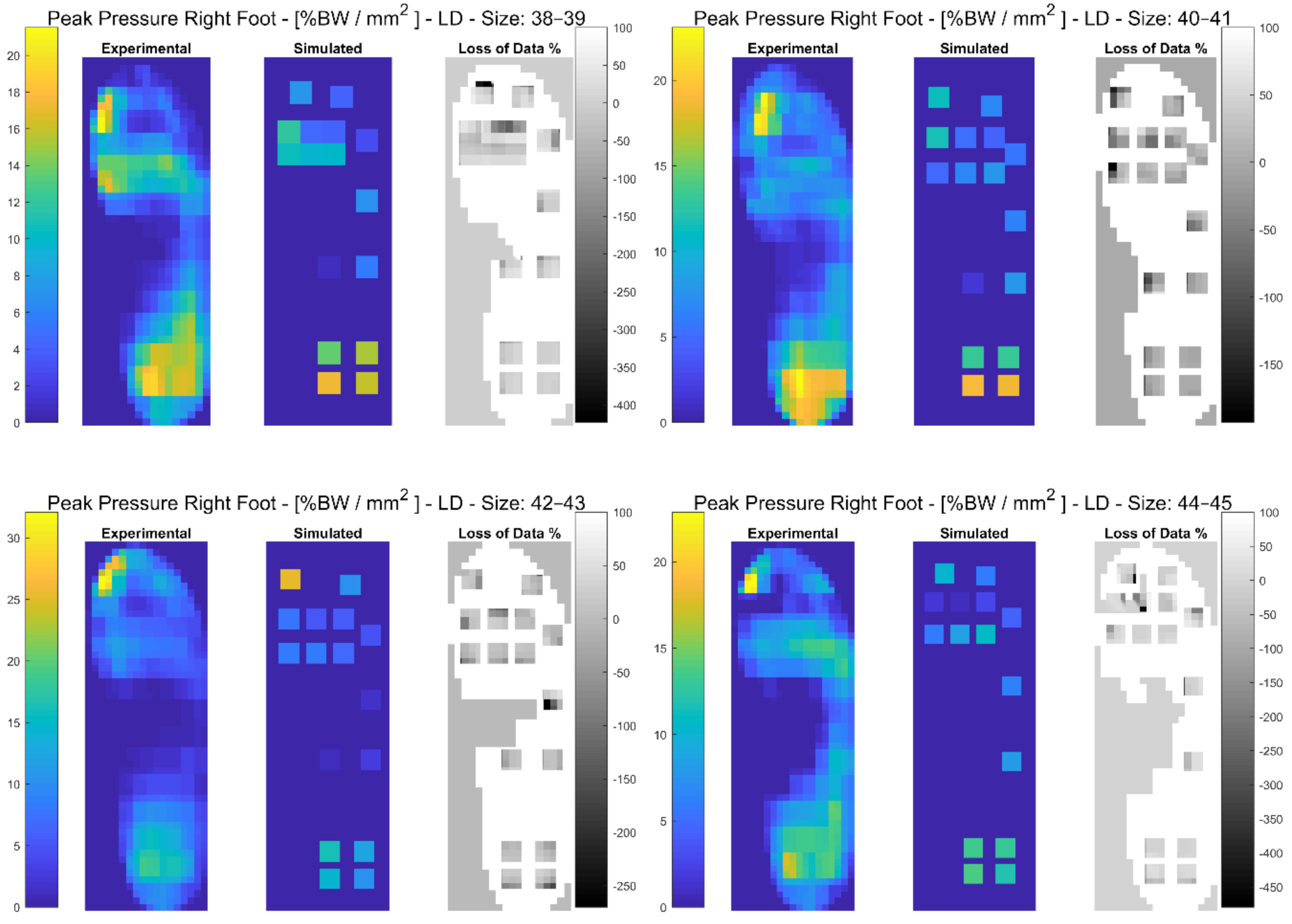
- Loaded descending (LD): the subject carries the weight to its initial position;
- ○
- Unloaded ascending (UA): the subject returns to its initial position.
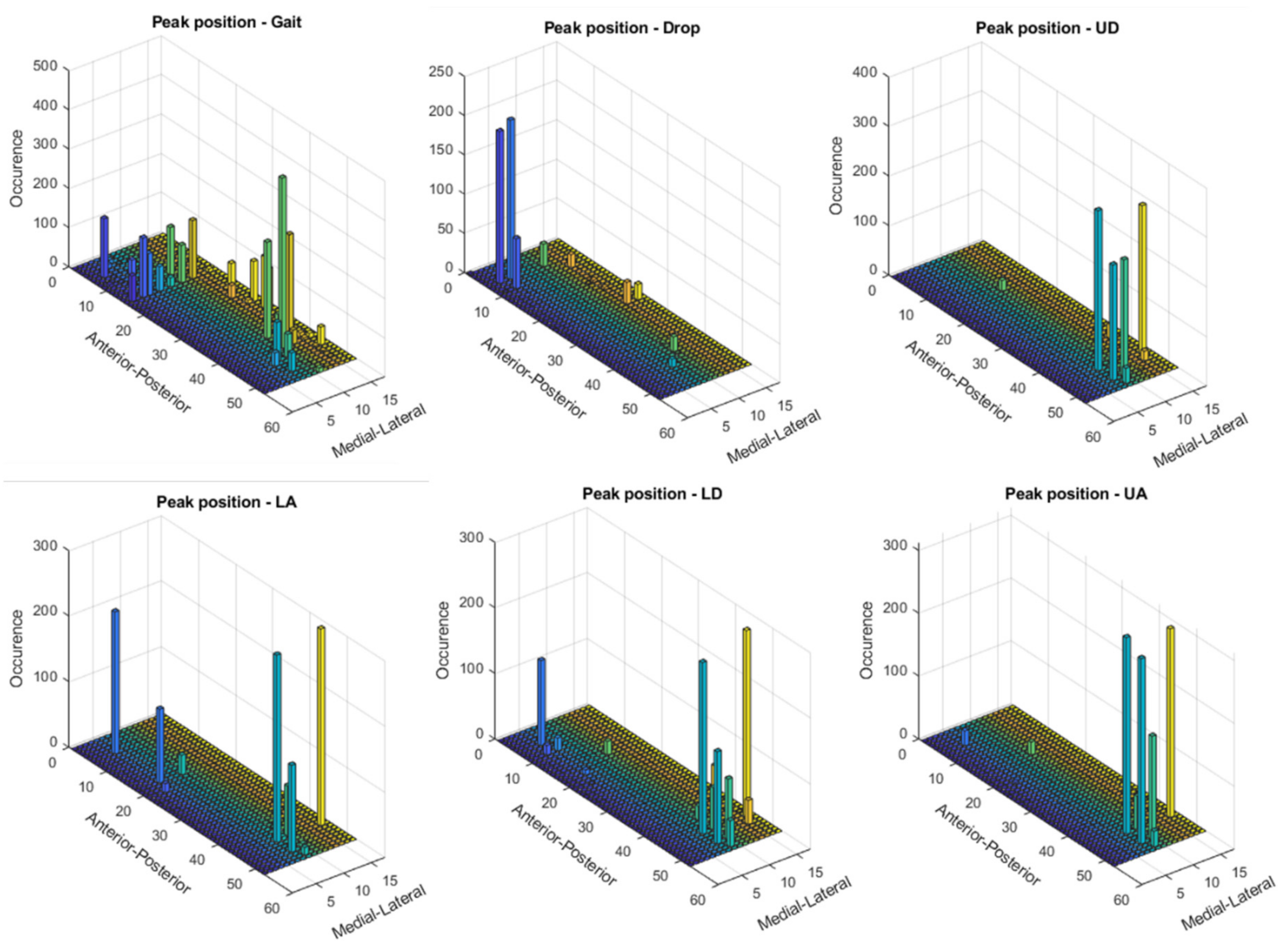
2.3. Simulated Sensor Layouts
2.4. Data Analysis
3. Results
3.1. Gait
3.2. Drop Landing
3.3. Weight Lifting
3.3.1. Unloaded Descending
3.3.2. Loaded Ascending
3.3.3. Loaded Descending
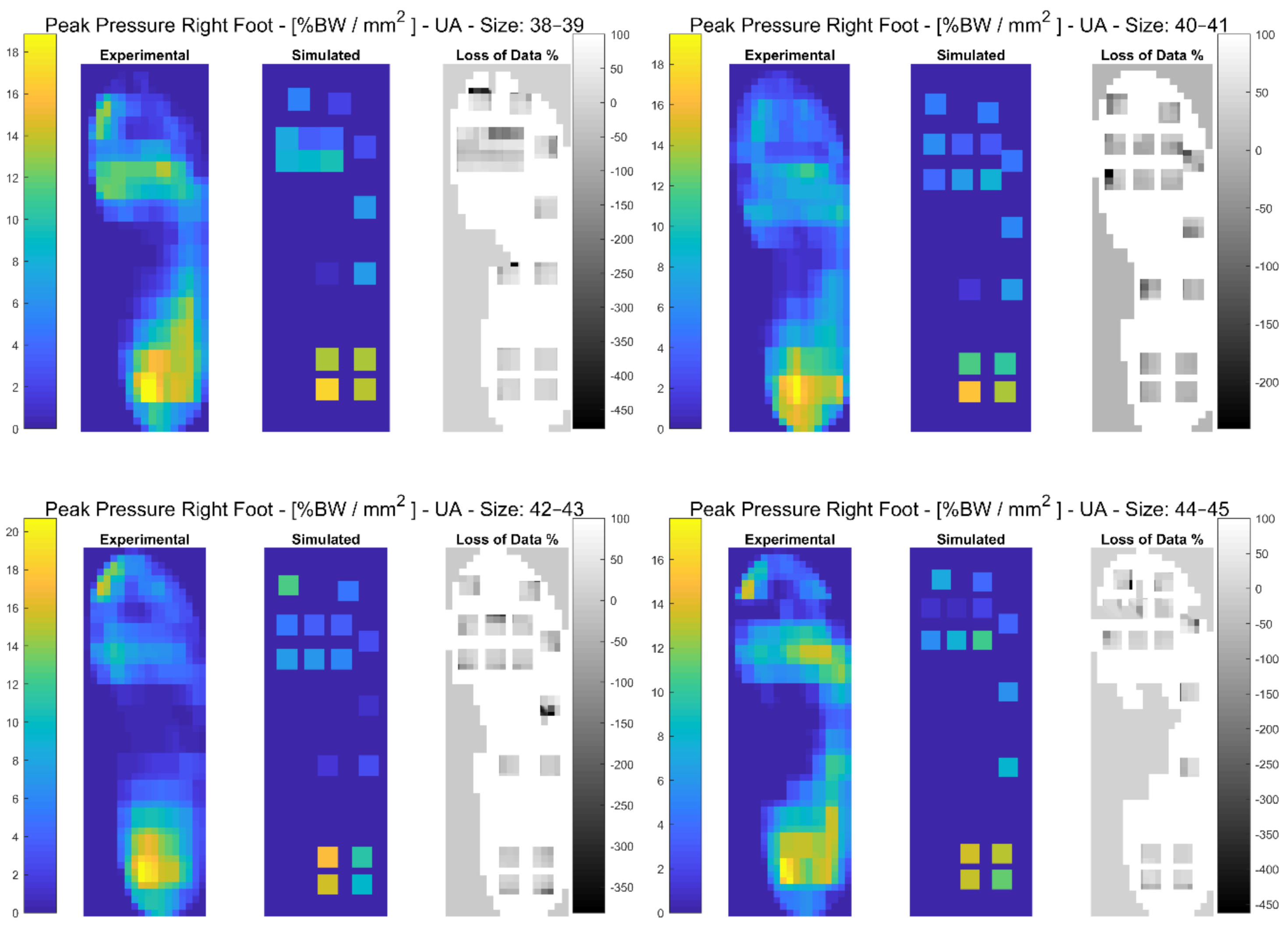
3.3.4. Unloaded Ascending
4. Discussion
4.1. Walking
4.2. Drop Landing
4.3. Weight Lifting
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Razak, A.H.A.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [Green Version]
- Tareco, J.M.; Miller, N.H.; MacWilliams, B.A.; Michelson, J.D. Defining flatfoot. Foot Ankle Int. 1999, 20, 456–460. [Google Scholar] [CrossRef]
- Lavery, L.A.; Vela, S.A.; Fleischli, J.G.; Armstrong, D.G.; Lavery, D.C. Reducing plantar pressure in the neuropathic foot: A comparison of footwear. Diabetes Care 1997, 20, 1706–1710. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mueller, M.J.; Hastings, M.; Commean, P.K.; Smith, K.N.; Pilgram, T.K.; Robertson, D.; Johnson, J. Forefoot structural predictors of plantar pressures during walking in people with diabetes and peripheral neuropathy. J. Biomech. 2003, 36, 1009–1017. [Google Scholar] [CrossRef]
- Chen, M.; Huang, B.; Xu, Y. Intelligent shoes for abnormal gait detection. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 2019–2024. [Google Scholar]
- Zulkifli, S.S.; Loh, W.P. A state-of-the-art review of foot pressure. Foot Ankle Surg. 2020, 26, 25–32. [Google Scholar] [CrossRef] [PubMed]
- Frederick, E.C.; Hartner, K.P. The evolution of foot pressure measurements. Sens. Mag. 1993, 10, 30–35. [Google Scholar]
- Mueller, M.J. Application of plantar pressure assessment in footwear and insert design. J. Orthop. Sports Phys. Ther. 1999, 29, 747–755. [Google Scholar] [CrossRef]
- Hodgson, B.; Tis, L.; Cobb, S.; McCarthy, S.; Higbie, E. The effect of 2 different custom-molded corrective orthotics on plantar pressure. J. Sport Rehabil. 2006, 15, 33–44. [Google Scholar] [CrossRef]
- Gioftsidou, A.; Malliou, P.; Pafis, G.; Beneka, A.; Godolias, G.; Maganaris, C. The effects of soccer training and timing of balance training on balance ability. Eur. J. Appl. Physiol. 2006, 96, 659–664. [Google Scholar] [CrossRef] [PubMed]
- Queen, R.M.; Haynes, B.B.; Hardaker, W.M.; Garrett, W.E. Forefoot loading during 3 athletic tasks. Am. J. Sports Med. 2007, 35, 630–636. [Google Scholar] [CrossRef]
- Bamberg, S.J.M.; Benbasat, A.Y.; Moxley Scarborough, D.; Krebs, D.E.; Paradiso, J.A. Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giacomozzi, C. Potentialities and criticalities of plantar pressure measurements in the study of foot biomechanics: Devices, methodologies and applications. In Biomechanics in Applications; IntechOpen: London, UK, 2011. [Google Scholar]
- Lin, F.; Wang, A.; Zhuang, Y.; Tomita, M.R.; Xu, W. Smart insole: A wearable sensor device for unobtrusive gait monitoring in daily life. IEEE Trans. Ind. Inform. 2016, 12, 2281–2291. [Google Scholar] [CrossRef]
- Price, C.; Parker, D.; Nester, C. Validity and repeatability of three in-shoe pressure measurement systems. Gait Posture 2016, 46, 69–74. [Google Scholar] [CrossRef] [Green Version]
- Stöggl, T.; Martiner, A. Validation of Moticon’s OpenGo sensor insoles during gait, jumps, balance and cross-country skiing specific imitation movements. J. Sports Sci. 2017, 35, 196–206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zizoua, C.; Benbakhti, S.; Attari, M. Wireless foot plantar pressure measurement instrument for medical diagnostic. In Proceedings of the Biomedical Engineering International Conference, Hong Kong, China, 18 October 2014. [Google Scholar]
- De Rossi, S.; Lenzi, T.; Vitiello, N.; Donati, M.; Persichetti, A.; Giovacchini, F.; Vecchi, F.; Carrozza, M.C. Development of an in-shoe pressure-sensitive device for gait análisis. In Proceedings of the 33rd Annual International Conference of the IEEE EMBS, Boston, MA, USA, 30 August–3 September 2011. [Google Scholar]
- Zhu, H.; Maalej, N.; Webster, J.; Tompkins, W.J.; Bach-Y-Rita, P.; Wertsch, J. An umbilical data-acquisition system for measuring pressures between the foot and shoe. IEEE Trans. Biomed. Eng. 1990, 37, 908–911. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.S.; Wertsch, J.J.; Harris, G.F.; Loftsgaarden, J.D.; Price, M.B. Foot pressure distribution during walking and shuffling. Arch. Phys. Med. Rehabil. 1991, 72, 390–397.48. [Google Scholar] [PubMed]
- Aqueveque, P.; Germany, E.; Osorio, R.; Pastene, F. Gait segmentation method using a plantar pressure measurement system with custom-made capacitive sensors. Sensors 2020, 20, 656. [Google Scholar] [CrossRef] [Green Version]
- Shu, L.; Hua, T.; Wang, Y.; Li, Q.Q.; Feng, D.D.; Tao, X. In-shoe plantar pressure measurement and analysis system based on fabric pressure sensing array. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 767–775. [Google Scholar] [CrossRef] [Green Version]
- Mokhlespour Esfahani, M.I.; Nussbaum, M. Preferred placement and usability of a smart textile system vs. inertial measurement units for activity monitoring. Sensors 2018, 18, 2501. [Google Scholar] [CrossRef] [Green Version]
- Mokhlespour Esfahani, M.I.; Nussbaum, M.A. Using smart garments to differentiate among normal and simulated abnormal. Gaits. J. Biomech. 2019, 93, 70–76. [Google Scholar] [CrossRef] [PubMed]
- Preece, S.J.; Kenney, L.P.J.; Major, M.J.; Dias, T.; Lay, E.; Fernandes, B.T. Automatic identification of gait events using an instrumented sock. J. Neuroeng. Rehabil. 2011, 8, 32. [Google Scholar] [CrossRef] [Green Version]
- Tirosh, O.; Begg, R.; Passmore, E.; Knopp-Steinberg, N. Wearable textile sensor sock for gait analysis. In Proceedings of the 2013 Seventh International Conference on Sensing Technology, Wellington, New Zealand, 3–5 December 2013. [Google Scholar]
- Oks, A.; Katashev, A.; Zadinans, M.; Rancans, M.; Litvak, J. Development of smart sock system for gate analysis and foot pressure control. In XIV Mediterranean Conference on Medical and Biological Engineering and Computing 2016: MEDICON 2016, Paphos, Cyprus, 31 March–2 April 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 466–469. [Google Scholar]
- Giacomozzi, C.; Stebbins, J.A. Anatomical masking of pressure footprints based on the Oxford Foot Model: Validation and clinical relevance. Gait Posture 2017, 53, 131–138. [Google Scholar] [CrossRef]
- Medina, J.M.; Valovich McLeod, T.C.; Howell, S.K.; Kingma, J.J. Timing of neuromuscular activation of the quadriceps and hamstrings prior to landing in high school male athletes, female athletes, and female non-athletes. J. Electromyogr. Kinesiol. 2008, 18, 591–597. [Google Scholar] [CrossRef]
- NIOSH. Movimentazione Manuale dei Carichi. Available online: http://www.unipd-org.it/rls/PericoliRischi/Rischi/MMC/NIOSH.html (accessed on 13 August 2020).
- Leardini, A.; Sawacha, Z.; Paolini, G.; Ingrosso, S.; Nativo, R.; Benedetti, M.G. A new anatomically based protocol for gait analysis in children. Gait Posture 2007, 26, 560–571. [Google Scholar] [CrossRef]
- Sawacha, Z.; Guarneri, G.; Cristoferi, G.; Guiotto, A.; Avogaro, A.; Cobelli, C. Diabetic gait and posture abnormalities: A biomechanical investigation through three dimensional gait analysis. Clin. Biomech. 2009, 24, 722–728. [Google Scholar] [CrossRef] [PubMed]
- DeBerardinis, J.; Dufek, J.S.; Trabia, M.B.; Lidstone, D.E. Assessing the validity of pressure-measuring insoles in quantifying gait variables. J. Rehabil. Assist. Technol. Eng. 2018, 5. [Google Scholar] [CrossRef] [Green Version]
- Giacomozzi, C.; Sartor, C.D.; Telles, R.; Uccioli, L.; Sacco, I.C.N. Ulcer-risk classification and plantar pressure distribution in patients with diabetic polyneuropathy: Exploring the factors that can lead to foot ulceration. Ann. Ist. Super. Sanità 2018, 54, 284–293. [Google Scholar]
- Bus, S.A.; Valk, G.D.; Van Deursen, R.W.M.; Armstrong, D.G.; Caravaggi, C.M.F.; Hlaváček, P.; Bakker, K.; Cavanagh, P.R. The effectiveness of footwear and offloading interventions to prevent and heal foot ulcers and reduce plantar pressure in diabetes: A systematic review. Diabetes Metab. Res. Rev. 2008, 24, S162–S180. [Google Scholar] [CrossRef] [PubMed]
- Sawacha, Z.; Guarneri, G.; Cristoferi, G.; Guiotto, A.; Avogaro, A.; Cobelli, C. Integrated kinematics–kinetics–plantar pressure data analysis: A useful tool for characterizing diabetic foot biomechanics. Gait Posture 2012, 36, 20–26. [Google Scholar] [CrossRef] [PubMed]
- Sacco, I.C.N.; Akashi, P.M.H.; Hennig, E.M. A comparison of lower limb EMG and ground reaction forces between barefoot and shod gait in participants with diabetic neuropathic and healthy controls. BMC Musculoskelet. Disord. 2010, 11, 24. [Google Scholar] [CrossRef] [PubMed]
- Van Schie, C.H.M. A review of the biomechanics of the diabetic foot. Int. J. Low. Extrem. Wounds 2005, 4, 160–170. [Google Scholar] [CrossRef]
- Uccioli, L.; Caselli, A.; Giacomozzi, C.; Macellari, V.; Giurato, L.; Lardieri, L.; Menzinger, G. Pattern of abnormal tangential forces in the diabetic neuropathic foot. Clin. Biomech. 2001, 16, 446–454. [Google Scholar] [CrossRef]
- Xiong, S.; Goonetilleke, R.S.; Rodrigo, W.D.A.S.; Zhao, J. A model for the perception of surface pressure on human foot. Appl. Ergon. 2013, 44, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Rossi, W.A. The Complete Footwear Dictionary, 2nd ed.; Krieger Pub Co.: Malabar, FL, USA, 2000. [Google Scholar]
- Mann, R.; Malisoux, L.; Urhausen, A.; Meijer, K.; Theisen, D. Plantar pressure measurements and running-related injury: A systematic review of methods and possible associations. Gait Posture 2016, 47, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Queen, R.M.; Abbey, A.N.; Chuckpaiwong, B.; Nunley, J.A. Plantar loading comparisons between women with a history of second metatarsal stress fractures and normal controls. Am. J. Sports Med. 2009, 37, 390–395. [Google Scholar] [CrossRef]
- Ribeiro, A.P.; Trombini-Souza, F.; Tessutti, V.D.; Lima, F.R.; Joao, S.M.A.; Sacco, I.C.N. The effects of plantar fasciitis and pain on plantar pressure distribution of recreational runners. Clin. Biomech. 2011, 26, 194–199. [Google Scholar] [CrossRef] [PubMed]
- Lugade, V.; Kaufman, K. Center of pressure trajectory during gait: A comparison of four foot positions. Gait Posture 2014, 40, 252–254. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Davis, B.L.; Cothren, R.M.; Quesada, P.; Hanson, S.B.; Perry, J.E. Frequency content of normal and diabetic plantar pressure profiles: Implications for the selection of transducer sizes. J. Biomech. 1996, 29, 979–983. [Google Scholar] [CrossRef]
- Giacomozzi, C.; Keijsers, N.; Pataky, T.; Rosenbaum, D. International scientific consensus on medical plantar pressure measurement devices: Technical requirements and performance. Ann. Ist. Super. Sanita 2012, 48, 259–271. [Google Scholar] [CrossRef]
- Lord, M. Spatial resolution in plantar pressure measurement. Med. Eng. Phys. 1997, 19, 140–144. [Google Scholar] [CrossRef]
- Pataky, T.C. Spatial resolution in plantar pressure measurement revisited. J. Biomech. 2012, 45, 2116–2124. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Cai, P.; Mao, Z. The configuration of plantar pressure sensing cells for wearable measurement of COP coordinates. Biomed. Eng. Online 2016, 15, 116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bergmann, J.H.M.; Chandaria, V.; McGregor, A. Wearable and implantable sensors: The patient’s perspective. Sensors 2012, 12, 16695–16709. [Google Scholar] [CrossRef] [Green Version]
- Bergmann, J.H.M.; McGregor, A.H. Body-worn sensor design: What do patients and clinicians want? Ann. Biomed. Eng. 2011, 39, 2299–2312. [Google Scholar] [CrossRef]
- Rodrigues, P.J.P. Sock for Integrated Biometric Monitoring. Google Patents EP2591717A1, 15 May 2013. [Google Scholar]
- Perrier, A.; Vuillerme, N.; Luboz, V.; Bucki, M.; Cannard, F.; Diot, B.; Colin, D.; Rin, D.; Bourg, J.-P.; Payan, Y. Smart diabetic socks: Embedded device for diabetic foot prevention. IRBM 2014, 35, 72–76. [Google Scholar] [CrossRef] [Green Version]
- Özdemir, A.T. An analysis on sensor locations of the human body for wearable fall detection devices: Principles and practice. Sensors 2016, 16, 1161. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task | Age [Years] Mean (SD) | Weight [Kg] Mean (SD) | Height [m] Mean (SD) | BMI [Kg/m2] Mean (SD) | Shoe Size Mean (SD) |
|---|---|---|---|---|---|
| Gait | 28.3 (7.27) | 68.7 (10.97) | 1.72 (0.05) | 23.19 (2.96) | 40.30 (2.31) |
| Drop Landing | 26.2 (3.33) | 68.45 (7.71) | 1.75 (0.07) | 22.22 (1.33) | 41.27 (1.55) |
| Lifting | 25.89 (2.14) | 65.72 (10.31) | 1.71 (0.10) | 22.31 (1.90) | 40.72 (2.27) |
| 38–39 Mean ± SD | 38–39 RMSE % | 40–41 Mean ± SD | 40–41 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 24.1 ± 6 | 19.1 ± 4.2 | <7.6–22.6> | 18.9 ± 6.5 | 15.3 ± 4.6 | <9.7–16.9> |
| Mean Pressure | 3.6 ± 0.4 | 1.1 ± 0.1 | <36.8–64> | 2.8 ± 0.6 | 0.8 ± 0.2 | <32–54.5> |
| GRF | 74.3 ± 8.4 | 22.6 ± 2.9 | <35.8–63.7> | 62 ± 12.8 | 17.9 ± 3.8 | <32–54.4> |
| dCOP | 0.6 ± 0.07 | 0.7 ± 0.07 | <4.2–15.9> | 0.7 ± 0.09 | 0.7 ± 0.1 | <2.2–8.1> |
| Med-Lat COP | 121.9 ± 57 | 131.2 ± 58.4 | <0.7–5.9> | 140.9 ± 66.9 | 149.5 ± 71 | <4.5–8.6> |
| Ant-Post COP | 30.4 ± 6.4 | 29.2 ± 7 | <2.3–7.9> | 31.8 ± 7.5 | 33.2 ± 7.5 | <0.8–5.8> |
| Contact Area | 62.6 ± 9.2 | 18.7 ± 3 | <43–73.5> | 60.6 ± 13.2 | 16.2 ± 3.8 | <49–77> |
| 42–43 Mean ± SD | 42–43 RMSE % | 44–45 Mean ± SD | 44–45 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 27.1 ± 4.6 | 20.6 ± 4 | <10.6–34.7> | 16.6 ± 2.5 | 13.7 ± 1.8 | <6.2–40.2> |
| Mean Pressure | 2.3 ± 0.2 | 0.8 ± 0.1 | <42–69.8> | 2.8 ± 0.1 | 0.6 ± 0.04 | <40.9–82.4> |
| GRF | 56.2 ± 5.3 | 19.1 ± 2 | <41.1–69.5> | 75.8 ± 3.5 | 15.4 ± 1.2 | <41–82.4> |
| dCOP | 0.7 ±0.05 | 0.7 ± 0.05 | <0.59–13> | 0.6 ± 0.05 | 0.6 ± 0.06 | <6.6–12.1> |
| Med-Lat COP | 108.7 ± 58.1 | 117.7 ± 60.5 | <2.2–7.9> | 144.3 ± 64 | 152.5 ± 70 | <6.1–11.1> |
| Ant-Post COP | 45.6 ± 6.2 | 42.6 ± 7 | <0.6–5.9> | 49.6 ± 8.4 | 43 ± 8.7 | <1.6–9.4> |
| Contact Area | 62.9 ± 9 | 21.6 ± 2.7 | <48.3–78.6> | 65.8 ± 7.6 | 13.9 ± 2 | <52.1–83.5> |
| 38–39 Mean ± SD | 38–39 RMSE % | 40–41 Mean ± SD | 40–41 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 34.3 ± 12.7 | 22.8 ± 6.6 | <21.5–36.7> | 30.7 ± 8.7 | 23.6 ± 6 | <14.3–39.7> |
| Mean Pressure | 4.4 ± 0.4 | 1.4 ± 0.2 | <38–69> | 4.4 ± 0.5 | 1.2 ± 0.2 | <36.5–59> |
| GRF | 94.9 ± 8.2 | 28.8 ± 4.6 | <40.6–68.9> | 97.7 ± 10.6 | 27.8 ± 4 | <38–68.9> |
| dCOP | 0.8 ± 0.1 | 0.9 ± 0.1 | <2.6–9.9> | 0.8 ± 0.09 | 0.8 ± 0.07 | <0.9–8.1> |
| Med-Lat COP | 136 ± 17.3 | 148 ± 17.1 | <2.7–7.4> | 158 ± 14.9 | 171.9 ± 15.8 | <4.9–10.1> |
| Ant-Post COP | 29.5 ± 3.5 | 29.2 ± 3.6 | <3–7.8> | 37.8 ± 3.3 | 38.8 ± 3.5 | <1.9–5.5> |
| Contact Area | 68.8 ± 12.2 | 21.4 ± 3 | <53.5–74.4> | 74.5 ± 9.7 | 20 ± 1.9 | <60.6–77.8> |
| 42–43 Mean ± SD | 42–43 RMSE % | 44–45 Mean ± SD | 44–45 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 29.4 ± 11 | 20.7 ± 8.5 | <14–24.9> | 28.2 ± 13.9 | 22.1 ± 11.3 | <7.8–25.9> |
| Mean Pressure | 3.7 ± 0.7 | 0.9 ± 0.2 | <29.2–63.7> | 4.1 ± 0.4 | 1.1 ± 0.3 | <39.7–72.1> |
| GRF | 89.6 ± 16.8 | 22.6 ± 4.4 | <31.8–63.7> | 110.2 ± 10.4 | 28.8 ± 8.1 | <41.3–72.2> |
| dCOP | 0.7 ± 0.1 | 0.8 ± 0.01 | <2.5–9.1> | 0.7 ± 0.08 | 0.7 ± 0.1 | <5.8–10.6> |
| Med-Lat COP | 142.3 ± 13.4 | 154.1 ± 13.1 | <6.3–8.1> | 149.6 ± 15.3 | 165.6 ± 15 | <3.2–6.9> |
| Ant-Post COP | 42.2 ± 3.9 | 38 ± 3.9 | <2.9–7.5> | 44.3 ± 2.5 | 38.4 ± 2.4 | <1.5–8.1> |
| Contact Area | 73.1 ± 14.5 | 17.8 ± 2.3 | <63.7–78.3> | 77.9 ± 13.5 | 17 ± 1.2 | <61.5–81.6> |
| 38–39 Mean ± SD | 38–39 RMSE % | 40–41 Mean ± SD | 40–41 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 17.8 ± 3.9 | 12.8 ± 3 | <16.4–26.3> | 23.1 ± 9.5 | 15.9 ± 3.9 | <18.5–29.2> |
| Mean Pressure | 2.4 ± 0.5 | 0.7 ± 0.1 | <43.2–54.8> | 2.2 ± 0.7 | 0.6 ± 0.2 | <44.6–51.3> |
| GRF | 49.9 ± 11.2 | 14.6 ± 2.9 | <43.1–54.6> | 48.5 ± 15.3 | 13.4 ± 3.7 | <44.5–51.3> |
| dCOP | 0.6 ± 0.1 | 0.6 ± 0.2 | <7.3–9.2> | 0.4 ± 0.1 | 0.4 ± 0.1 | <4.4–8> |
| Med-Lat COP | 89.2 ± 2.7 | 97.9 ± 3.4 | <3.9–5.2> | 100.2 ± 7.2 | 110.2 ± 8.4 | <5.2–6.9> |
| Ant-Post COP | 29 ± 0.6 | 27.9 ± 0.6 | <2.5–4.3> | 29.6 ± 1.1 | 30.1 ± 1.1 | <3.5–5.3> |
| Contact Area | 83.7 ± 12.9 | 29.5 ± 7.2 | <62.9–66.2> | 71.6 ± 19.4 | 21.9 ± 6.9 | <66.7–71.1> |
| 42–43 Mean ± SD | 42–43 RMSE % | 44–45 Mean ± SD | 44–45 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 14.8 ± 4.2 | 12 ± 3.5 | <11.3–14.6> | 15.5 ± 4 | 9.9 ± 2.3 | <18.1–45.2> |
| Mean Pressure | 2 ± 0.4 | 0.5 ± 0.1 | <44.9–62.4> | 2.1 ± 0.2 | 0.5 ± 0.05 | <61.8–69.6> |
| GRF | 47.4 ± 8.6 | 13 ± 3.1 | <44.8–62.3> | 56.9 ± 6.5 | 12.6 ± 1.4 | <61.7–69.5> |
| dCOP | 0.5 ± 0.1 | 0.5 ± 0.2 | <8.5–13.3> | 0.6 ± 0.1 | 0.6 ± 0.1 | <9.2–14.1> |
| Med-Lat COP | 77 ± 3.6 | 82.3 ± 4.6 | <3.9–5> | 96.9 ± 7.3 | 102.9 ± 8.3 | <7.5–10.9> |
| Ant-Post COP | 50.3 ± 0.8 | 46.2 ± 0.7 | <4.1–5> | 51.1 ± 0.8 | 46.3 ± 0.9 | <1.4–4.5> |
| Contact Area | 77.1 ± 12.7 | 23.1 ± 6.4 | <68.3–71.5> | 81.8 ± 9.5 | 20.5 ± 3.4 | <72.6–75.8> |
| 38–39 Mean ± SD | 38–39 RMSE % | 40–41 Mean ± SD | 40–41 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 20.5 ± 6 | 14 ± 2.7 | <17.2–26.3> | 21.3 ± 6.7 | 14.4 ± 3.6 | <21.6–31.3> |
| Mean Pressure | 2.7 ± 0.5 | 0.8 ± 0.2 | <49.6–56.6> | 2.5 ± 0.7 | 0.7 ± 0.2 | <44.4–51.1> |
| GRF | 56 ± 10.2 | 17.2 ± 3.3 | <49.5–56.5> | 56.1 ± 14.5 | 15.7 ± 4 | <44.3–51> |
| dCOP | 0.6 ± 0.1 | 0.6 ± 0.2 | <7.5–9.7> | 0.6 ± 0.1 | 0.6 ± 0.2 | <7.2–8.5> |
| Med-Lat COP | 107.1 ± 4.3 | 120 ± 5.4 | <4.1–4.7> | 130.3 ± 4.2 | 142.3 ± 4.1 | <5.2–7.3> |
| Ant-Post COP | 31 ± 0.6 | 30.3 ± 0.7 | <2.2–5> | 33.4 ± 0.9 | 34.7 ± 0.9 | <5–6.4> |
| Contact Area | 84.4 ± 11 | 29.9 ± 6.1 | <63.8–65.4> | 83.7 ± 14.7 | 24.9 ± 5.4 | <66.5–69.4> |
| 42–43 Mean ± SD | 42–43 RMSE % | 44–45 Mean ± SD | 44–45 RMSE % | |||
| Pedar-X® | Simulated Layout | Pedar-X® | Simulated Layout | |||
| Peak Pressure | 21.5 ± 9.9 | 16.8 ± 7.1 | <11–15.3> | 19 ± 7.7 | 10.4 ± 2.5 | <19.8–42.3> |
| Mean Pressure | 2.4 ± 0.4 | 0.7 ± 0.1 | <45–59.6> | 2.2 ± 0.3 | 0.5 ± 0.1 | <57.7–70.9> |
| GRF | 58.4 ± 10.5 | 16.4 ± 3.4 | <45–59.5> | 59.3 ± 8.2 | 13.7 ± 2.3 | <57.5–70.8> |
| dCOP | 0.6 ± 0.2 | 0.7 ± 0.2 | <7.5–9.7> | 0.6 ± 0.1 | 0.6 ± 0.2 | <3.2–5.6> |
| Med-Lat COP | 102.1 ± 3.9 | 111.2 ± 4.8 | <4.9–6.3> | 126.8 ± 5.2 | 135.2 ± 5.4 | <9–12> |
| Ant-Post COP | 47.2 ± 0.5 | 43.1 ± 0.6 | <4.5–6.4> | 47.7 ± 0.9 | 41.6 ± 1 | <2.2–5> |
| Contact Area | 82.9 ± 13.1 | 24.5 ± 6.2 | <70.3–71.5> | 83.7 ± 9.2 | 21.7 ± 2.6 | <72–75.1> |
| 38–39 Mean ± SD | 38–39 RMSE % | 40–41 Mean ± SD | 40–41 RMSE % | |||
| Pedar-X® | Simulated layout | Pedar-X® | Simulated layout | |||
| Peak Pressure | 19.9 ± 5.5 | 14 ± 2.9 | <16.2–23> | 25 ± 10.3 | 16.2 ± 6 | <17.9–28.6> |
| Mean Pressure | 2.6 ± 0.5 | 0.8 ± 0.2 | <46.5–54.4> | 2.5 ± 0.7 | 0.7 ± 0.2 | <45.1–50.7> |
| GRF | 54.1 ± 11.2 | 16.7 ± 3.3 | <46.4–54.3> | 54.8 ± 16.2 | 15.2 ± 3.7 | <45.1–50.7> |
| dCOP | 0.6 ± 0.1 | 0.6 ± 0.2 | <7.2–9.4> | 0.5 ± 0.2 | 0.6 ± 0.2 | <5.4–7.2> |
| Med-Lat COP | 99.3 ± 6.9 | 110.2 ± 8.2 | <3.9–5.2> | 121.9 ± 9.1 | 133.4 ± 9.5 | <5.7–7.6> |
| Ant-Post COP | 30.9 ± 1.1 | 30 ± 1.2 | <2.9–5.2> | 33.1 ± 1.1 | 34 ± 1.3 | <3.2–5.8> |
| Contact Area | 84.2 ± 10.5 | 29.9 ± 6.3 | <63.1–65.3> | 74.2 ± 16.4 | 23.3 ± 6.2 | <65.5–71> |
| 42–43 Mean ± SD | 42–43 RMSE % | 44–45 Mean ± SD | 44–45 RMSE % | |||
| Pedar-X® | Simulated layout | Pedar-X® | Simulated layout | |||
| Peak Pressure | 21.5 ± 8.7 | 16.3 ± 6 | <13.3–17.8> | 15.9 ± 4 | 10.7 ± 2 | <15.6–31.1> |
| Mean Pressure | 2.3 ± 0.4 | 0.6 ± 0.1 | <46.2–58.4> | 2.4 ± 0.2 | 0.5 ± 0.05 | <62.2–72.2> |
| GRF | 55.8 ± 9.9 | 15.9 ± 3.6 | <46.2–58.3> | 63.7 ± 5.4 | 14.6 ± 1.3 | <62.1–72.1> |
| dCOP | 0.6 ± 0.2 | 0.7 ± 0.2 | <6.2–8.2> | 0.6 ± 0.1 | 0.6 ± 0.1 | <3.7–6.6> |
| Med-Lat COP | 92.4 ± 8.4 | 100.9 ± 8.8 | <4.5–5.9> | 122.7 ± 9.3 | 127.7 ± 9.8 | <8.7–9.9> |
| Ant-Post COP | 47.9 ± 1.7 | 43.5 ± 1.4 | <3.6–4.7> | 48.5 ± 1.1 | 43.3 ± 1.3 | <1.9–3.9> |
| Contact Area | 82.2 ± 11.6 | 23.8 ± 4.4 | <67–71.9> | 82.8 ± 10.2 | 20.7 ± 3 | <74.1–76.3> |
| 38–39 Mean ± SD | 38–39 RMSE % | 40–41 Mean ± SD | 40–41 RMSE % | |||
| Pedar-X® | Simulated layout | Pedar-X® | Simulated layout | |||
| Peak Pressure | 18.2 ± 3.2 | 13.7 ± 3 | <20–23.1> | 22.7 ± 6 | 16.1 ± 3.2 | <23.2–25.7> |
| Mean Pressure | 2.6 ± 0.5 | 0.8 ± 1.4 | <45.8–54.4> | 2.4 ± 0.6 | 0.7 ± 1.4 | <47.4–52.7> |
| GRF | 53.6 ± 10.3 | 16.2 ± 2.9 | <45.6–54.3> | 53.3 ± 12.8 | 14.7 ± 3.2 | <47.3–52.6> |
| dCOP | 0.6 ± 0.1 | 0.6 ± 0.1 | <8.2–10.1> | 0.5 ± 0.2 | 0.6 ± 0.2 | <5.7–8> |
| Med-Lat COP | 98.9 ± 5.1 | 109.4 ± 7 | <4.5–5> | 104.7 ± 9.5 | 114.4 ± 11 | <4.4–5.8> |
| Ant-Post COP | 31.1 ± 0.9 | 29.9 ± 1.2 | <3.7–4.9> | 32.2 ± 0.9 | 32.3 ± 1.3 | <5.4–6.2> |
| Contact Area | 85 ± 11.6 | 29.9 ± 6.6 | <62.5–65.7> | 75.3 ± 17.6 | 23.3 ± 6.4 | <67.9–70.9> |
| 42–43 Mean ± SD | 42–43 RMSE % | 44–45 Mean ± SD | 44–45 RMSE % | |||
| Pedar-X® | Simulated layout | Pedar-X® | Simulated layout | |||
| Peak Pressure | 18.3 ± 5.3 | 14.5 ± 3.3 | <12–17.1> | 12.4 ± 2.8 | 9.6 ± 2.1 | <14.6–23.9> |
| Mean Pressure | 2.2 ± 0.4 | 0.6 ± 0.1 | <52.1–59.5> | 1.9 ± 0.2 | 0.4 ± 0.1 | <59–70.4> |
| GRF | 53.9 ± 9.8 | 14.3 ± 2.3 | <52–59.5> | 51.6 ± 6.3 | 11.7 ± 1.4 | <58.9–70.4> |
| dCOP | 0.5 ± 0.1 | 0.5 ± 0.1 | <7.8–10> | 0.5 ± 0.1 | 0.5 ± 0.1 | <2.6–7.8> |
| Med-Lat COP | 91 ± 5.1 | 100.1 ± 5.8 | <4–4.6> | 102.2 ± 13.4 | 108 ± 15.1 | <8.2–9.5> |
| Ant-Post COP | 48.1 ± 0.7 | 44.2 ± 0.7 | <3.9–5.4> | 48.9 ± 1.2 | 44.3 ± 1.4 | <1–4.2> |
| Contact Area | 80.7 ± 13.5 | 23.7 ± 5.2 | <69.2–71.2> | 82.4 ± 6 | 20.6 ± 2.5 | <73.7–76.2> |
| References | Instruments | Validation | Biomechanical Variables | ||
|---|---|---|---|---|---|
| Yes or No | Details of Instruments | Details of Procedures | |||
| Lavery, L.A. et al., 1991 | Novel Pedar X | No | Peak plantar pressure | ||
| Mueller, M.J. et al., 2003 | F-Scan, Tekscan | No | Peak plantar pressure | ||
| Chen, M. et al., 2008 | Shoe-Integrated System | No | No | ||
| Mueller, M.J. et al., 1999 | // | No | Peak pressure and contact area | ||
| Hodgson, B. et al., 2006 | EMED Pedar in-shoe plantar-pressure system | No | Plantar pressure | ||
| Morris Bamberg, S.J. et al., 2008 | Gaitshoe | Yes | Massachusetts general hospital, biomotion laboratory | Gait parameters | |
| Price, C. et al., 2016 | Shoe-Integrated Wireless Sensor System | Yes | Medilogic, Tekscan and Pedar | Plantar pressure and contact area | |
| Preece, S.J. et al., 2011 | Instrumented Sock Wearable Textile Sensor Socks | No | Sensor output and ankle angle | ||
| Tirosh, O. et al., 2013 | Sensor Socks | Yes | Tekscan, Inc. | Temporal parameters | |
| Oks, A. et al., 2016 | Daid® Pressure Sock System | Yes | Made by comparative gait analysis of different running and walking modes of asymptomatic and flat foot | Temporal gait analysis, plantar pressure detection | |
| Stöggl, T. et al., 2017 | Opengo Sensor Insole | Yes | Pedarx sensor insole and AMTI force-plate systems | Ground contact and flight times | |
| Zizoua, C. et al., 2014 | Wireless Sensor System Equipped with Force Sensing Resistors (Fsr) | No | Pressure distributions | ||
| De Rossi, S. et al., 2011 | In-Shoe Device | Yes | Validation on a healthy subject | Plantar pressure | |
| Aqueveque, P. et al., 2020 | Sensorized Insoles | Yes | Two instrumented insoles were implemented in order to perform experimental walking pressure validation tests | Plantar pressure | |
| Lin, F. et al., 2016 | Smart Insole | Yes | Collecting complete gait parameters and further extracting useful features | Gait parameters and features | |
| Shu, L. et al., 2010 | In-Shoe Plantar Pressure Measurement and Analysis | Yes | To verify if the integrationof the measured force on the feet surface gives a value that is close to the body weight of the subject | Mean pressure, peak pressure, center of pressure (cop), and shift speed of cop | |
| DeBerardinis, J. et al., 2018 | Systmedilogic® Pressure-Measuring Insoles (Schönefeld, Germany) | Yes | Force platform measurements | Stance time and support-phase | |
| Mokhlespour et al., 2019 | Smart Socks | No | No | ||
| GRF–RMSE% | Fast Walking | Slow Walking | Walking | Drop Jump Test | Drop Landing Test |
|---|---|---|---|---|---|
| Stöggl and Martiner [20] | <47.9–74.9> % | <55.1–76.4> % | / | <35.1–47.5> % | / |
| Simulated Layout | / | / | <32–82> % | / | <41.3–72.2> % |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciniglio, A.; Guiotto, A.; Spolaor, F.; Sawacha, Z. The Design and Simulation of a 16-Sensors Plantar Pressure Insole Layout for Different Applications: From Sports to Clinics, a Pilot Study. Sensors 2021, 21, 1450. https://doi.org/10.3390/s21041450
Ciniglio A, Guiotto A, Spolaor F, Sawacha Z. The Design and Simulation of a 16-Sensors Plantar Pressure Insole Layout for Different Applications: From Sports to Clinics, a Pilot Study. Sensors. 2021; 21(4):1450. https://doi.org/10.3390/s21041450
Chicago/Turabian StyleCiniglio, Alfredo, Annamaria Guiotto, Fabiola Spolaor, and Zimi Sawacha. 2021. "The Design and Simulation of a 16-Sensors Plantar Pressure Insole Layout for Different Applications: From Sports to Clinics, a Pilot Study" Sensors 21, no. 4: 1450. https://doi.org/10.3390/s21041450