A FOD Detection Approach on Millimeter-Wave Radar Sensors Based on Optimal VMD and SVDD



Abstract
:1. Introduction
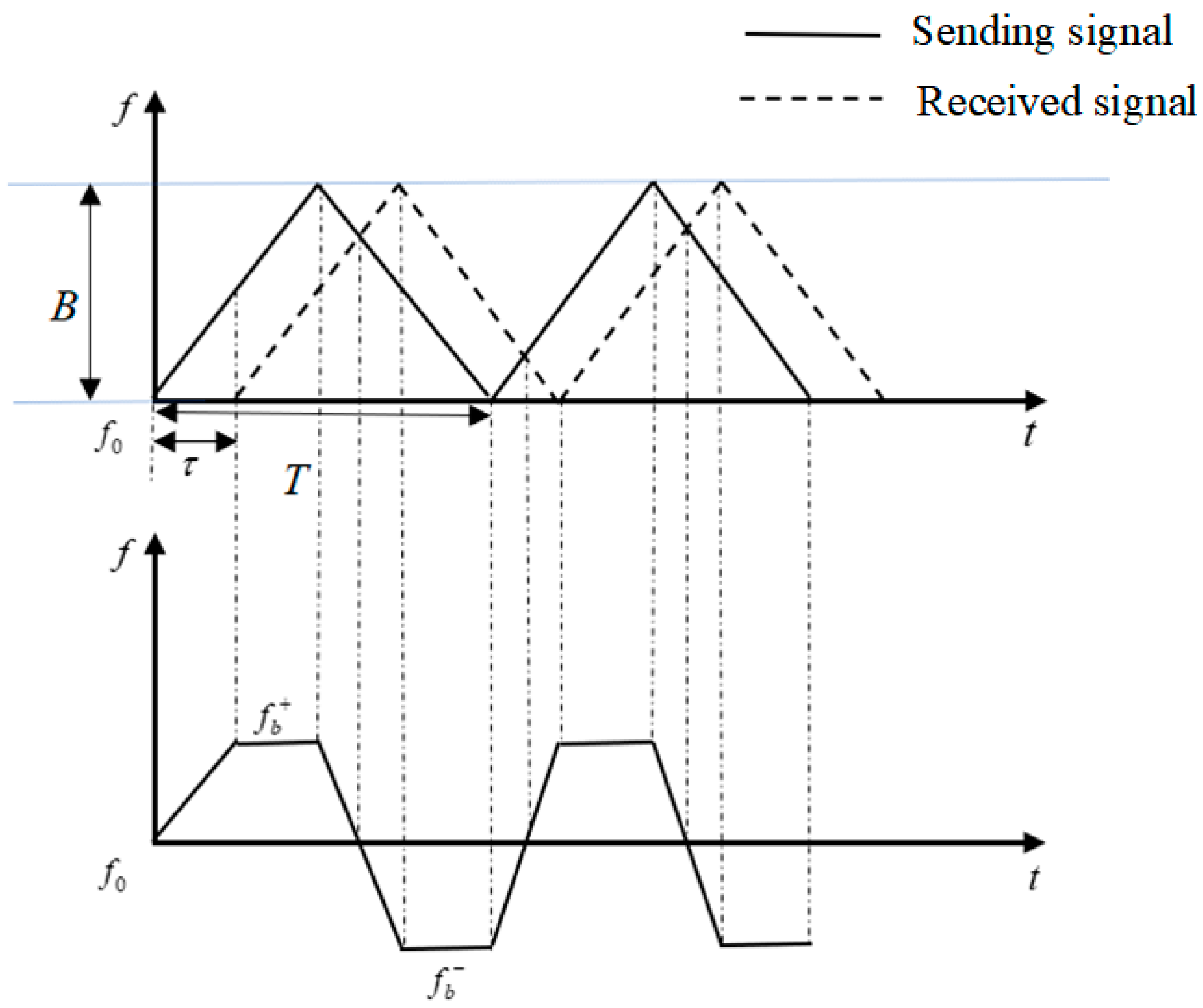
2. Distance Measuring Principle of LFMCW Radar
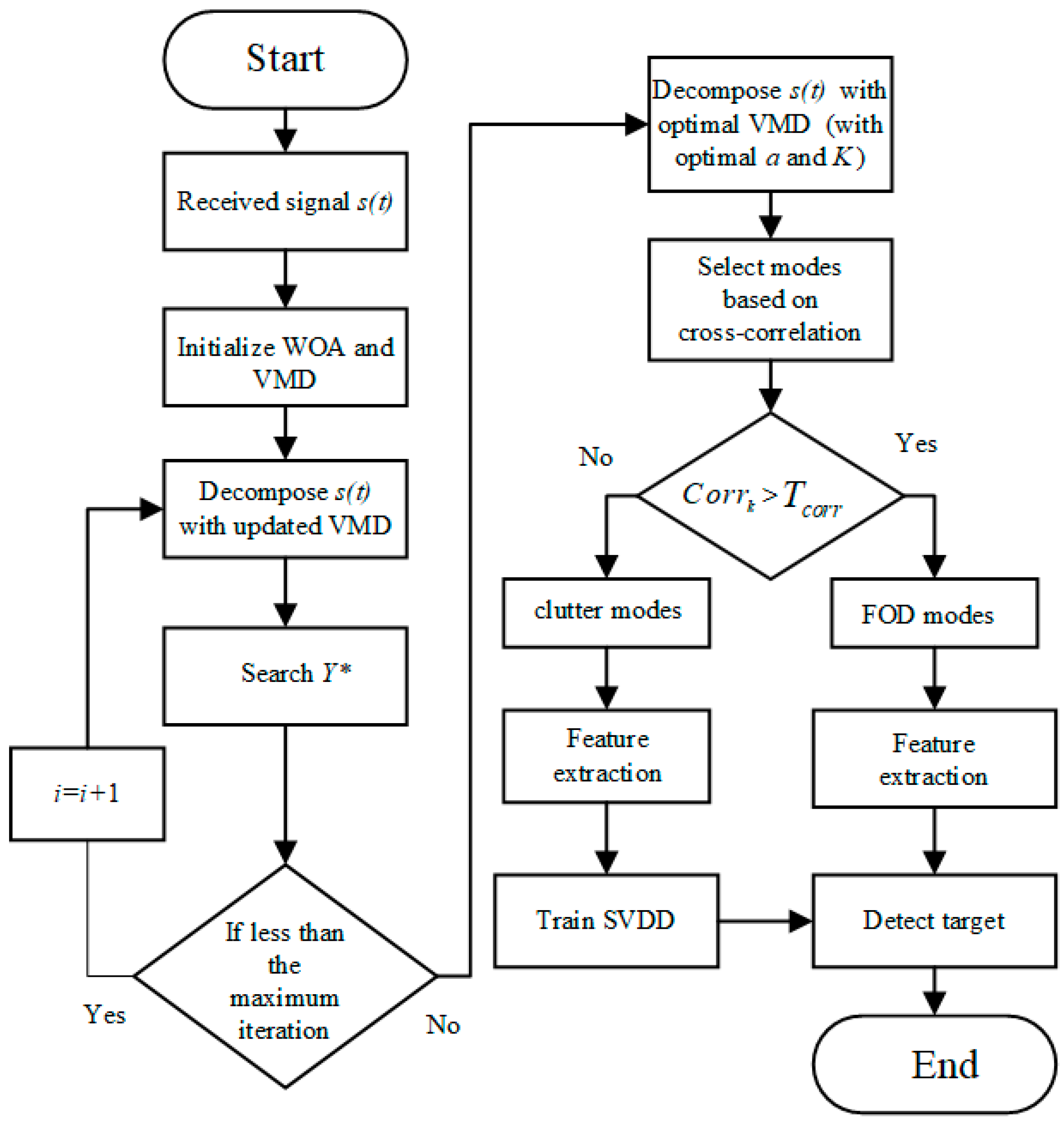
3. Proposed Method and Explanation
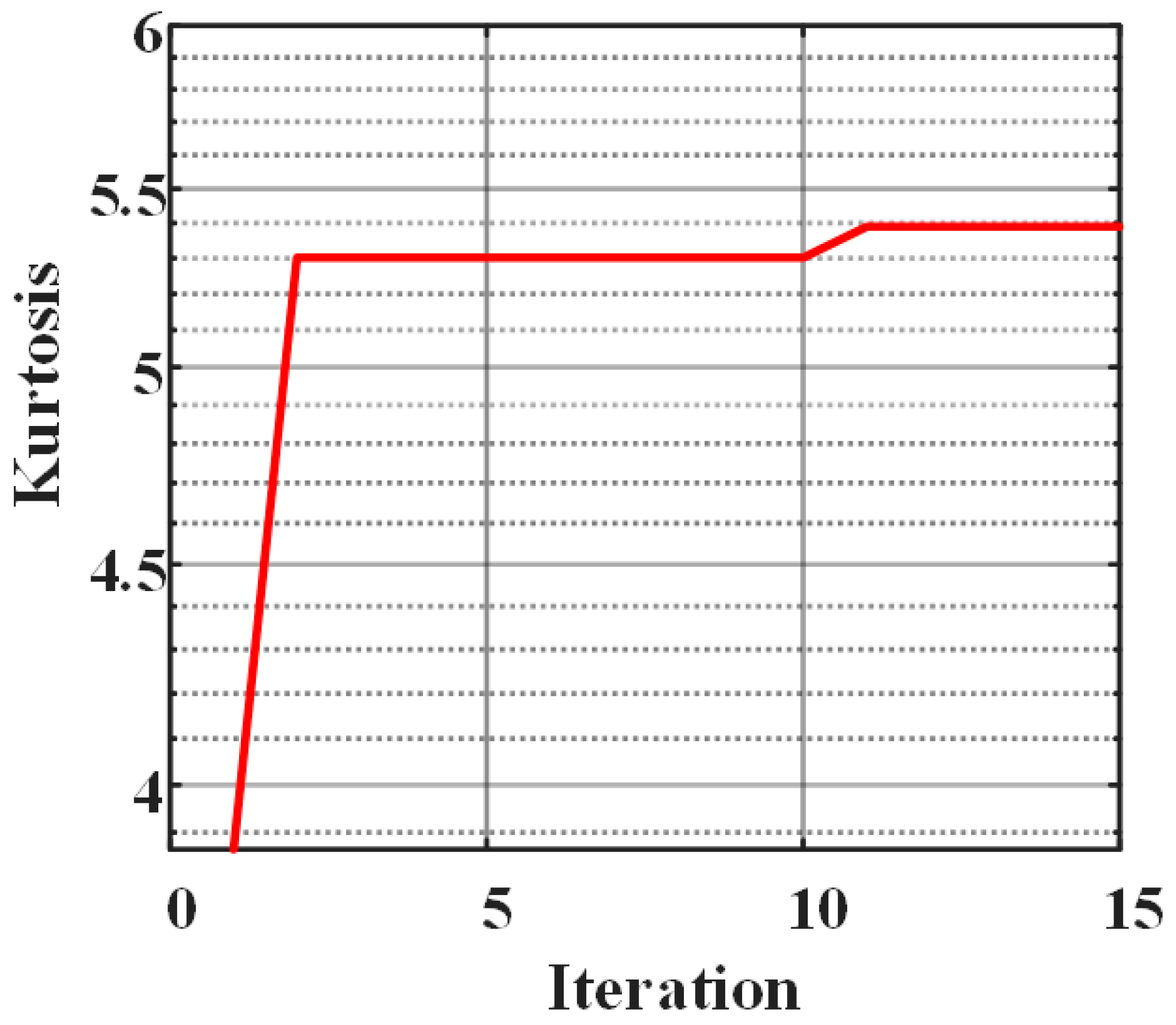
3.1. VMD Parameter Optimization
3.2. SVDD Classification
4. Discussion
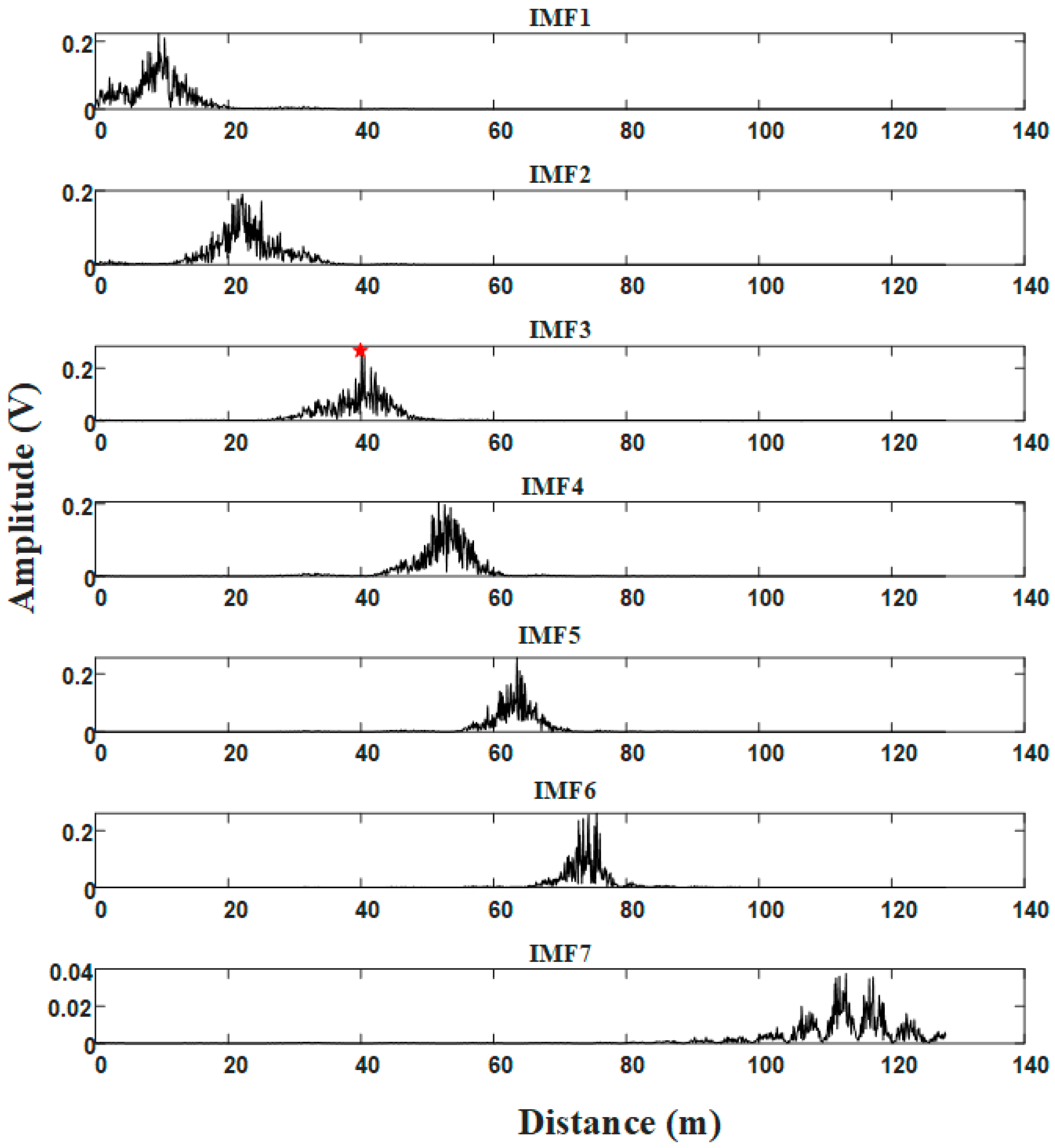
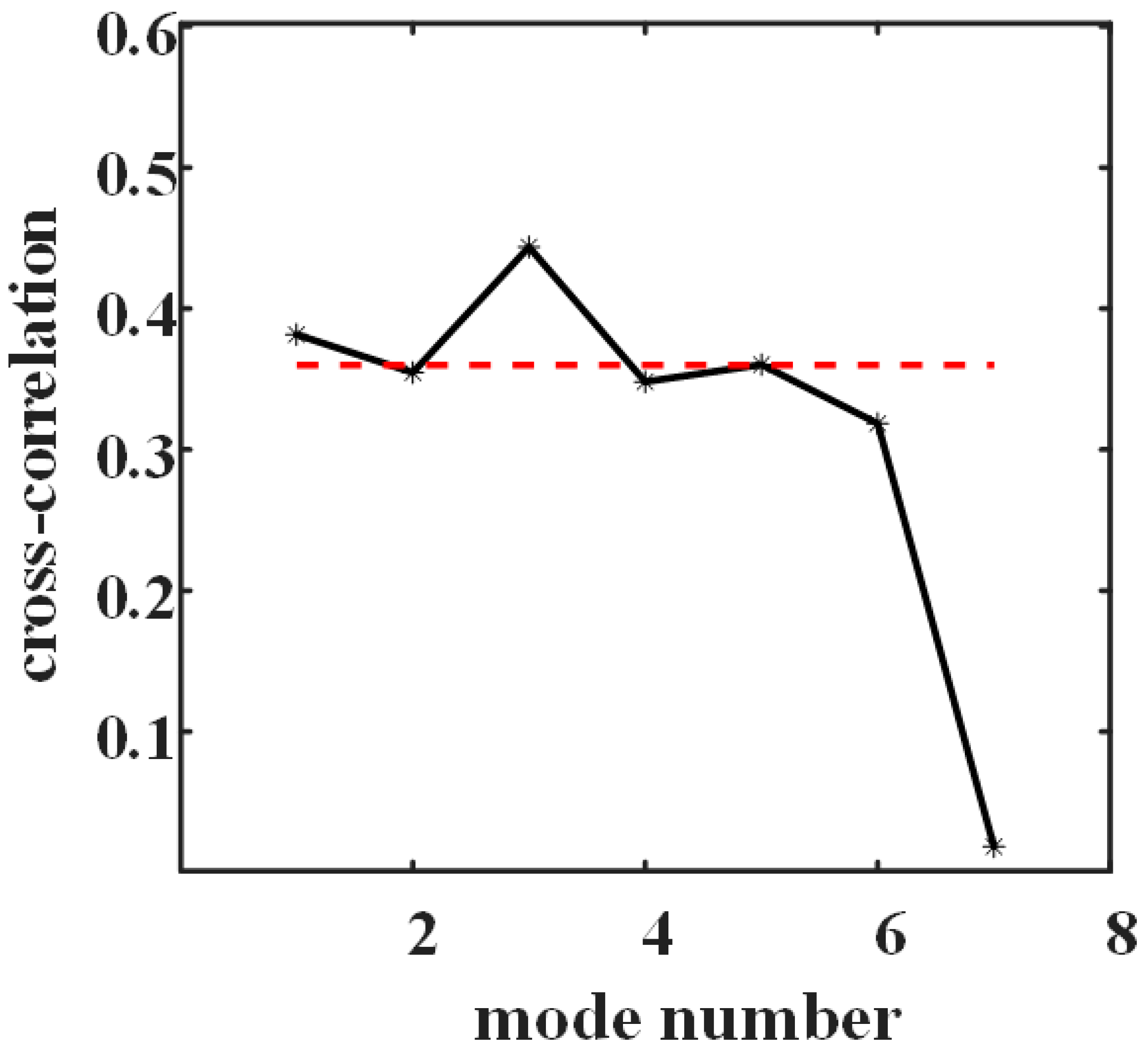
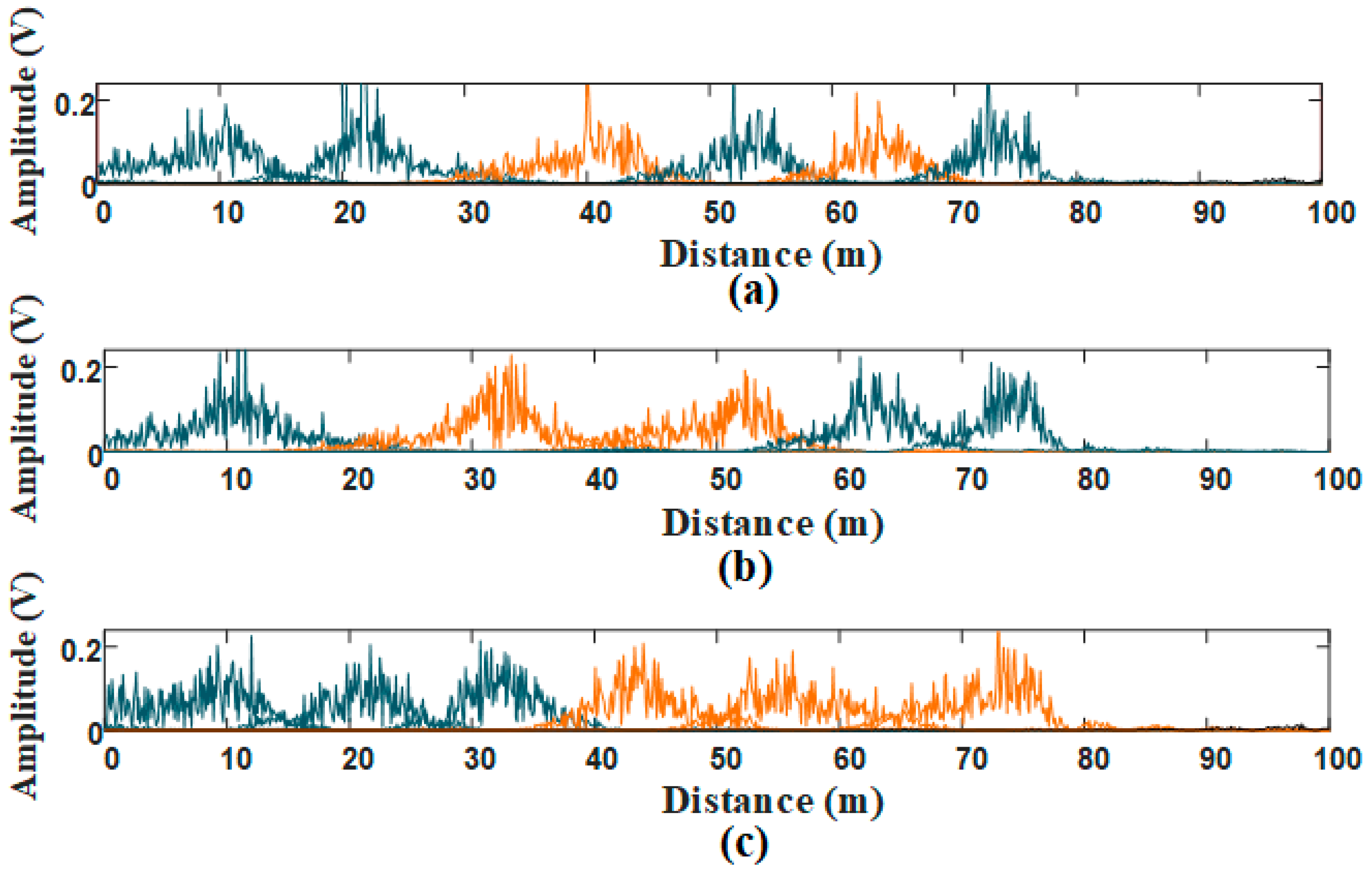
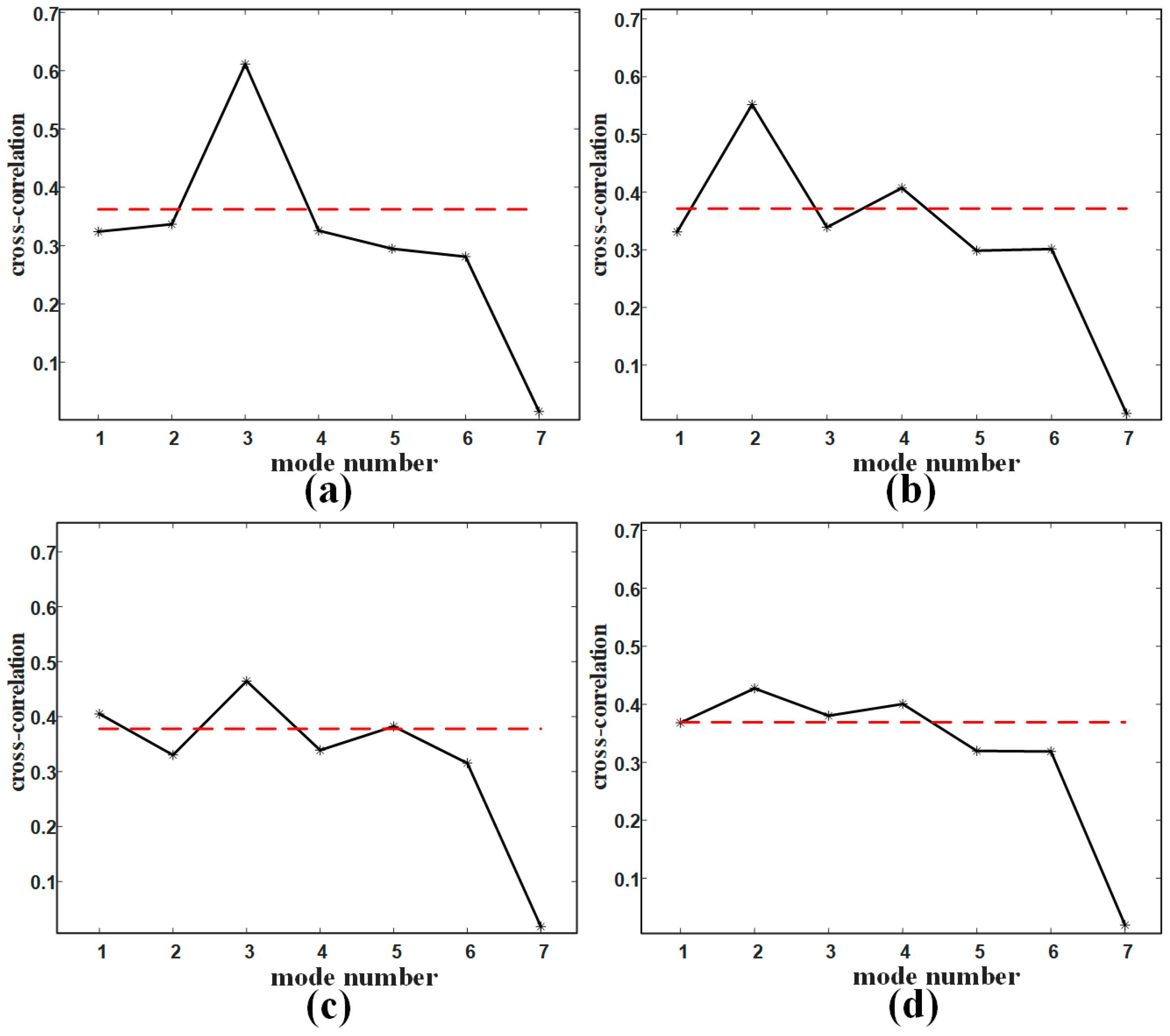
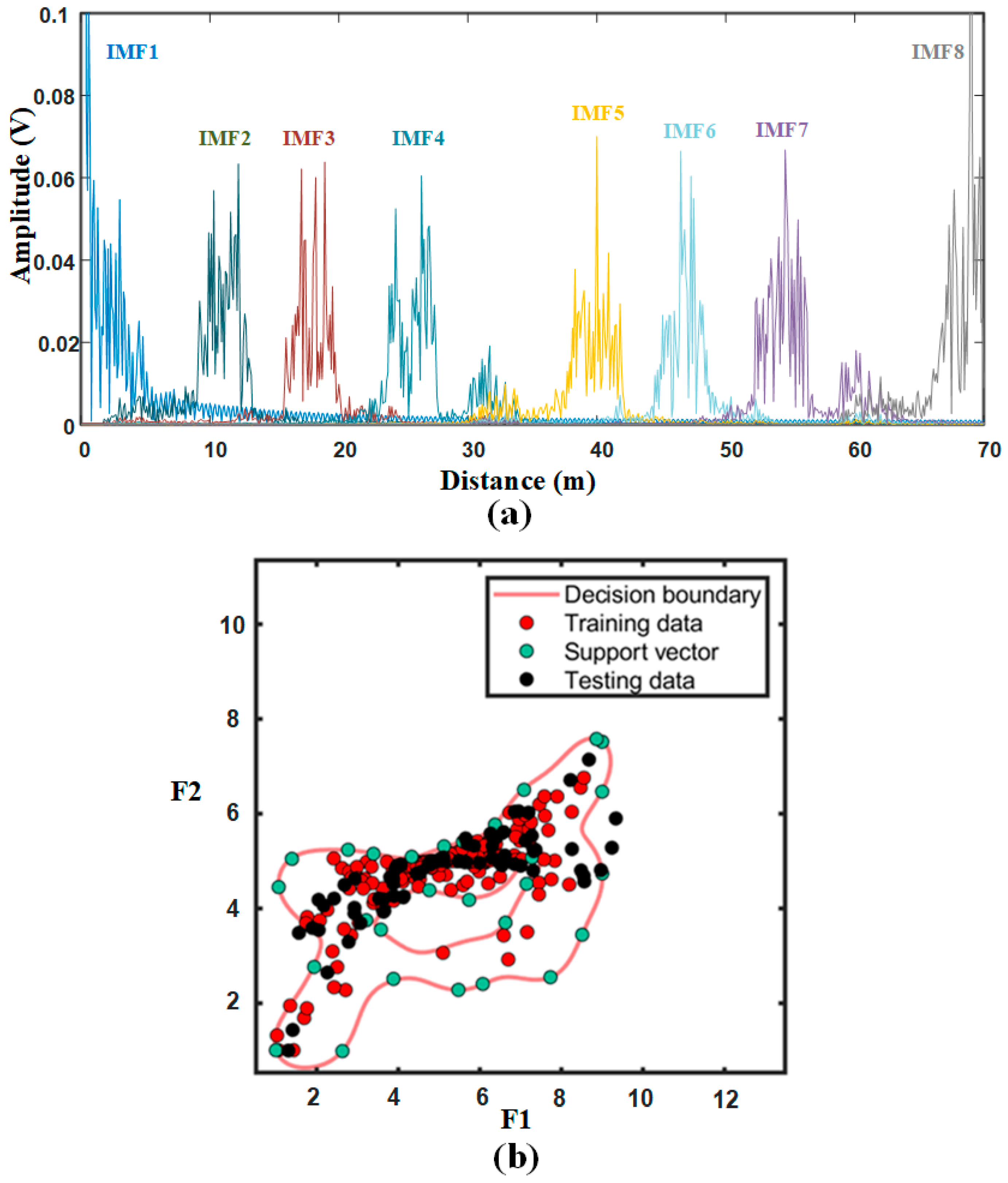
4.1. Signal Decomposition and Mode Selection
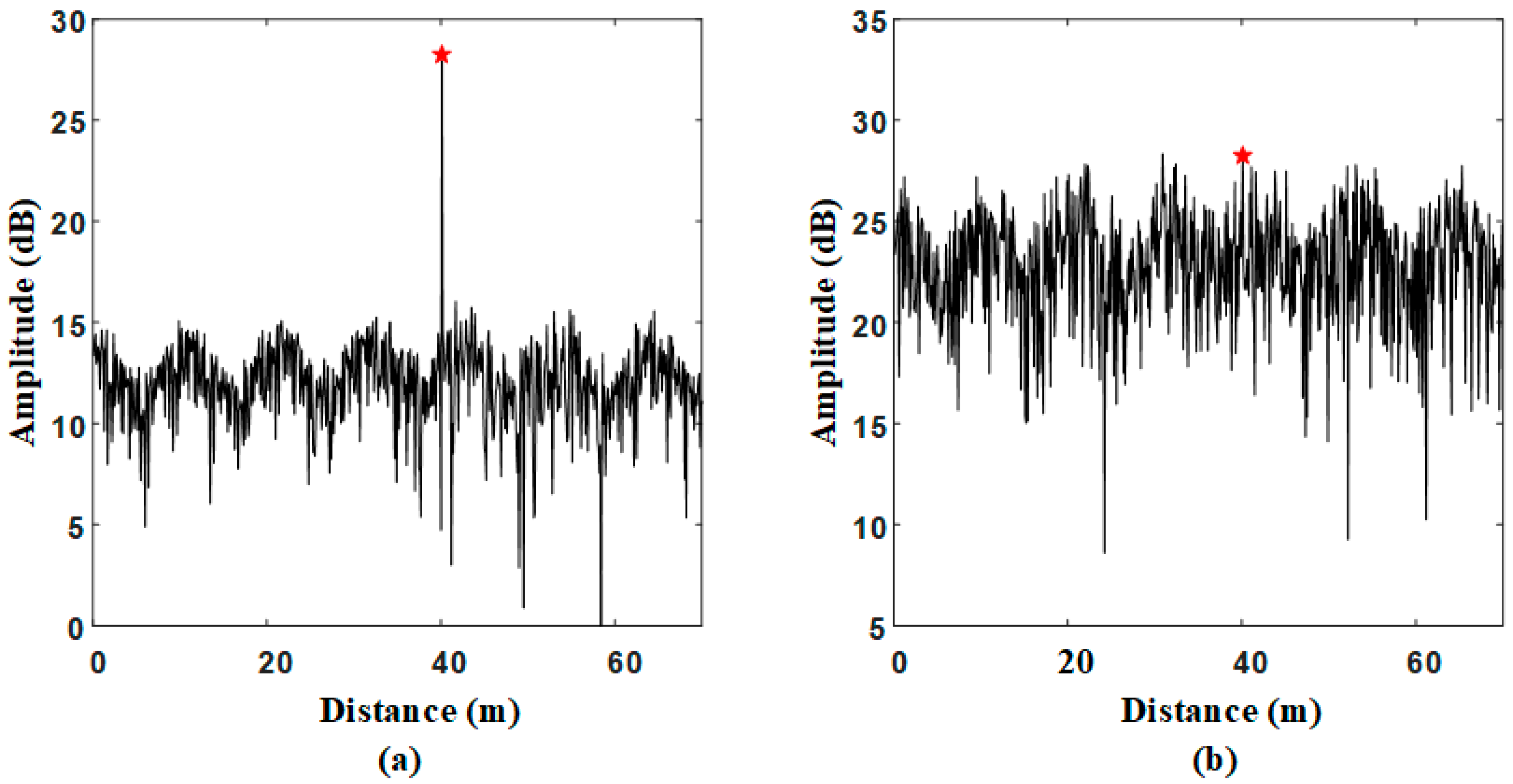
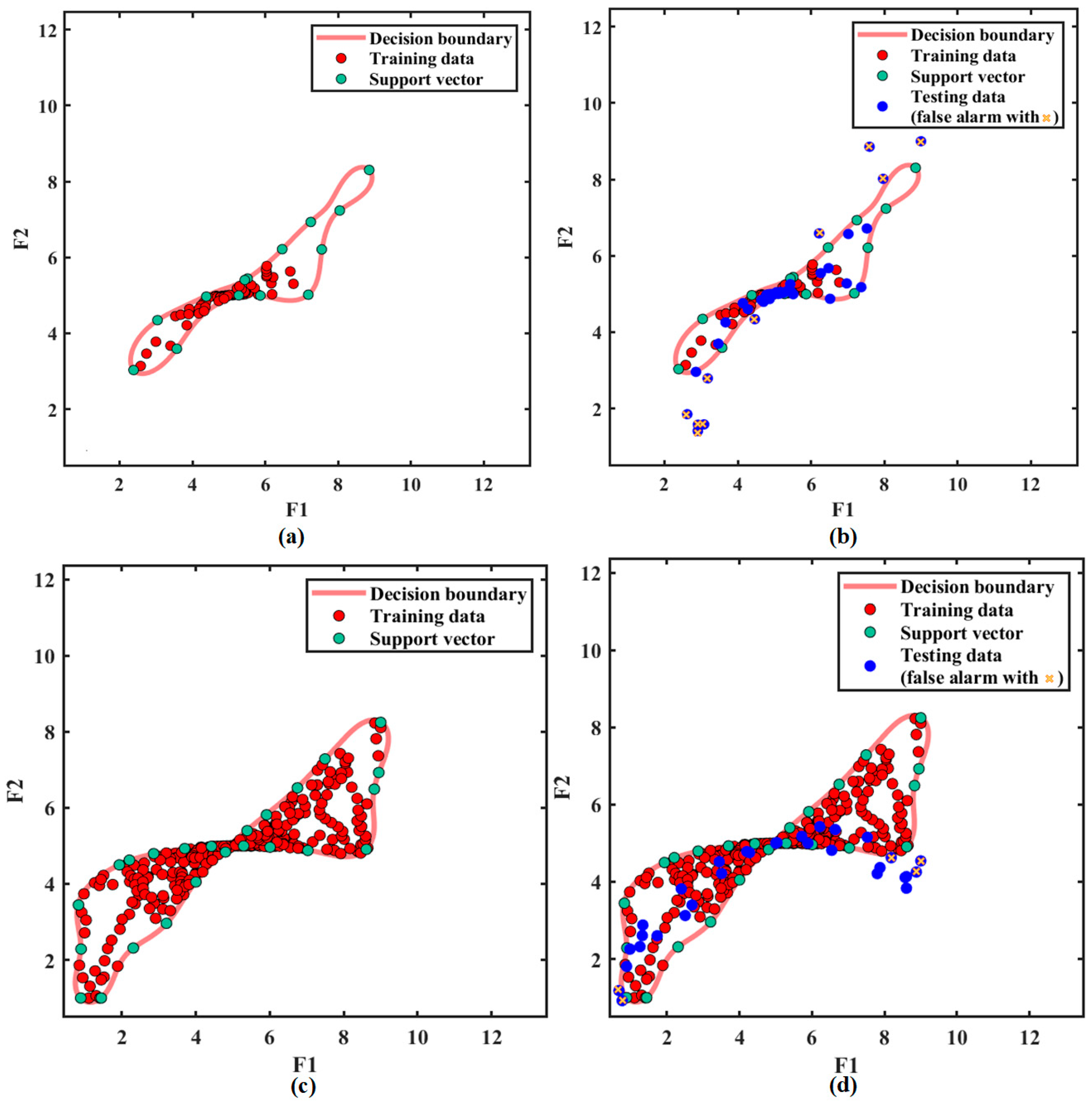
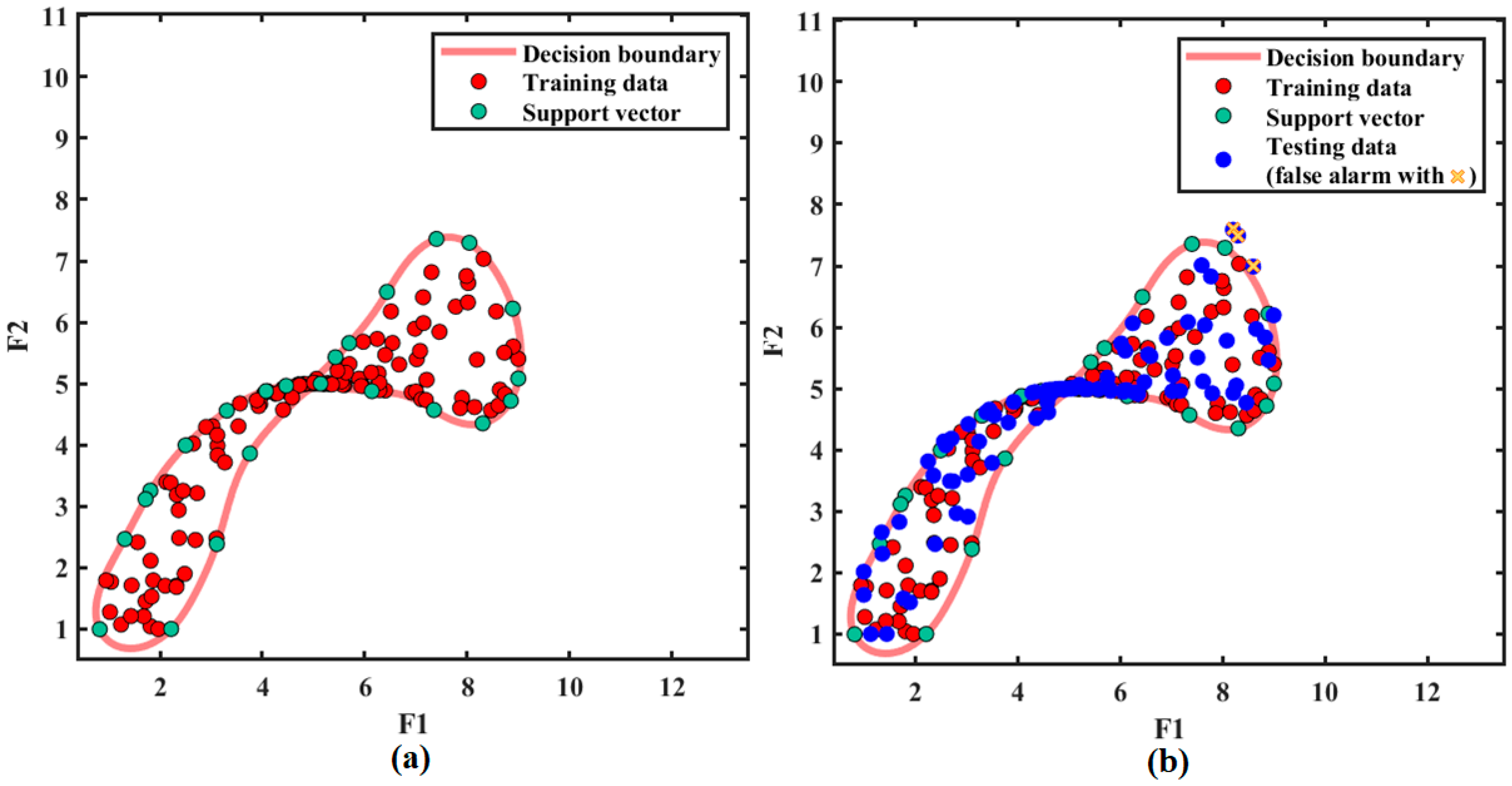
4.2. SVDD Classification and Fod Detection
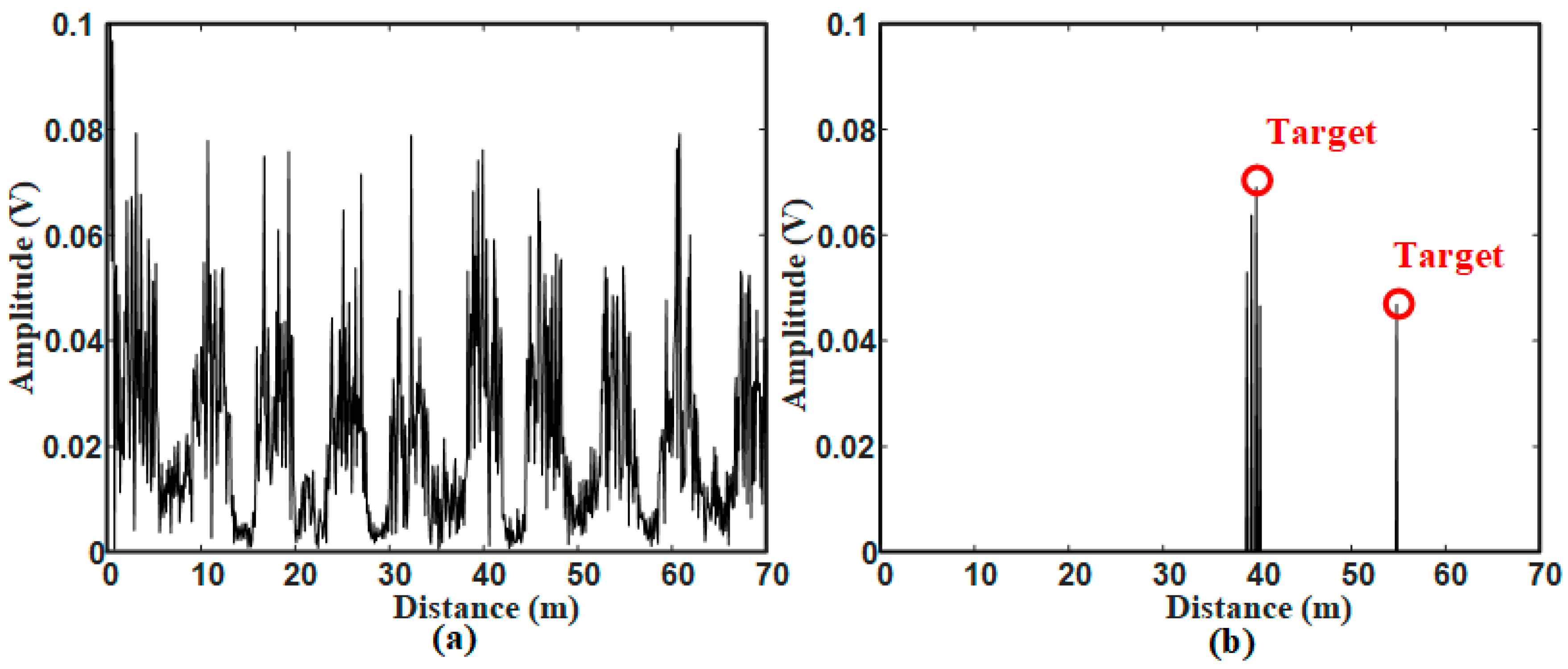
4.3. Field Measure and Validation Result
5. Conclusions
- (1)
- The VMD-SVDD method is more adaptable. There is no need to set VMD parameters, among which quadratic penalty parameter and decomposition layer number are searched by the WOA algorithm;
- (2)
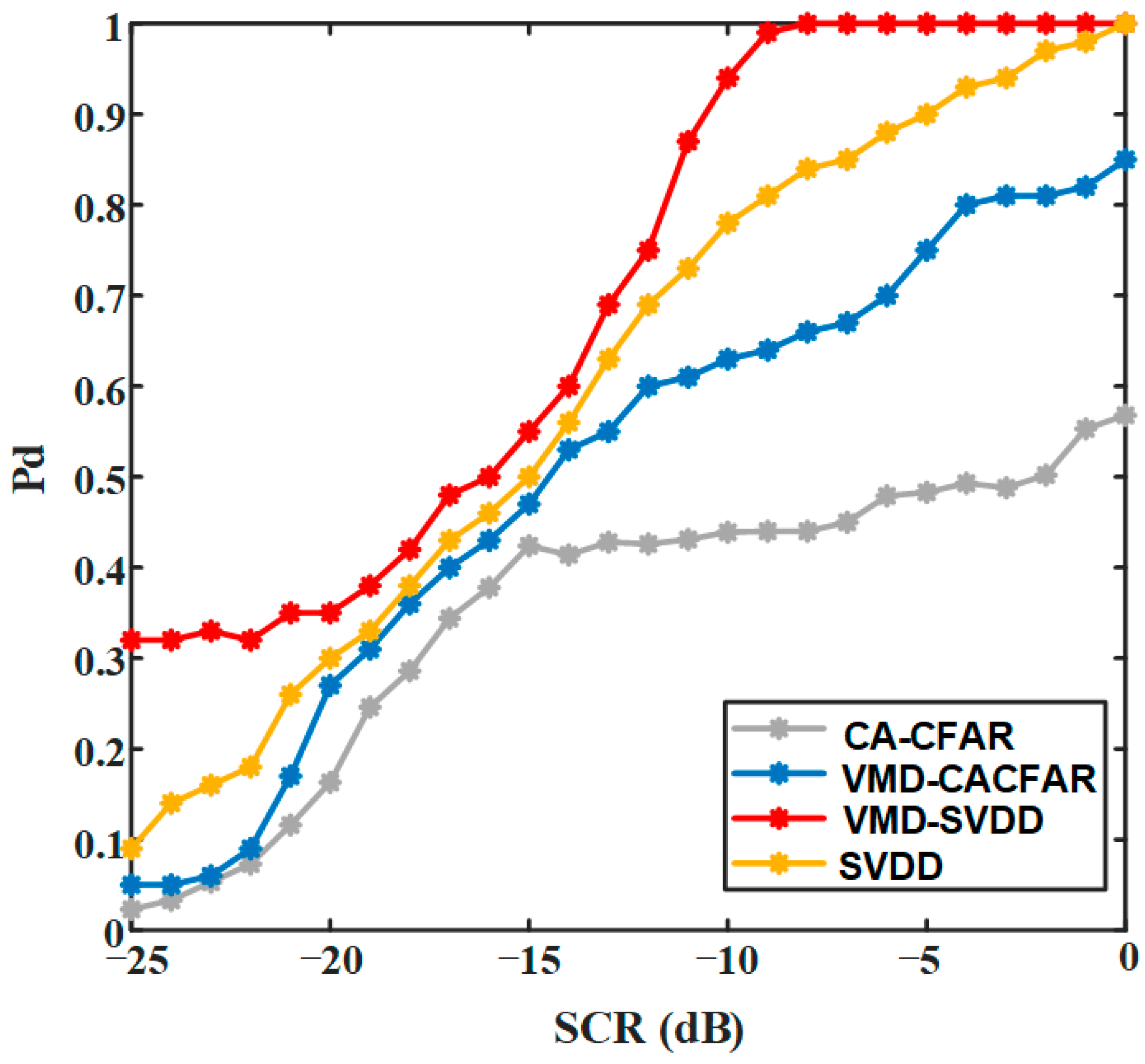
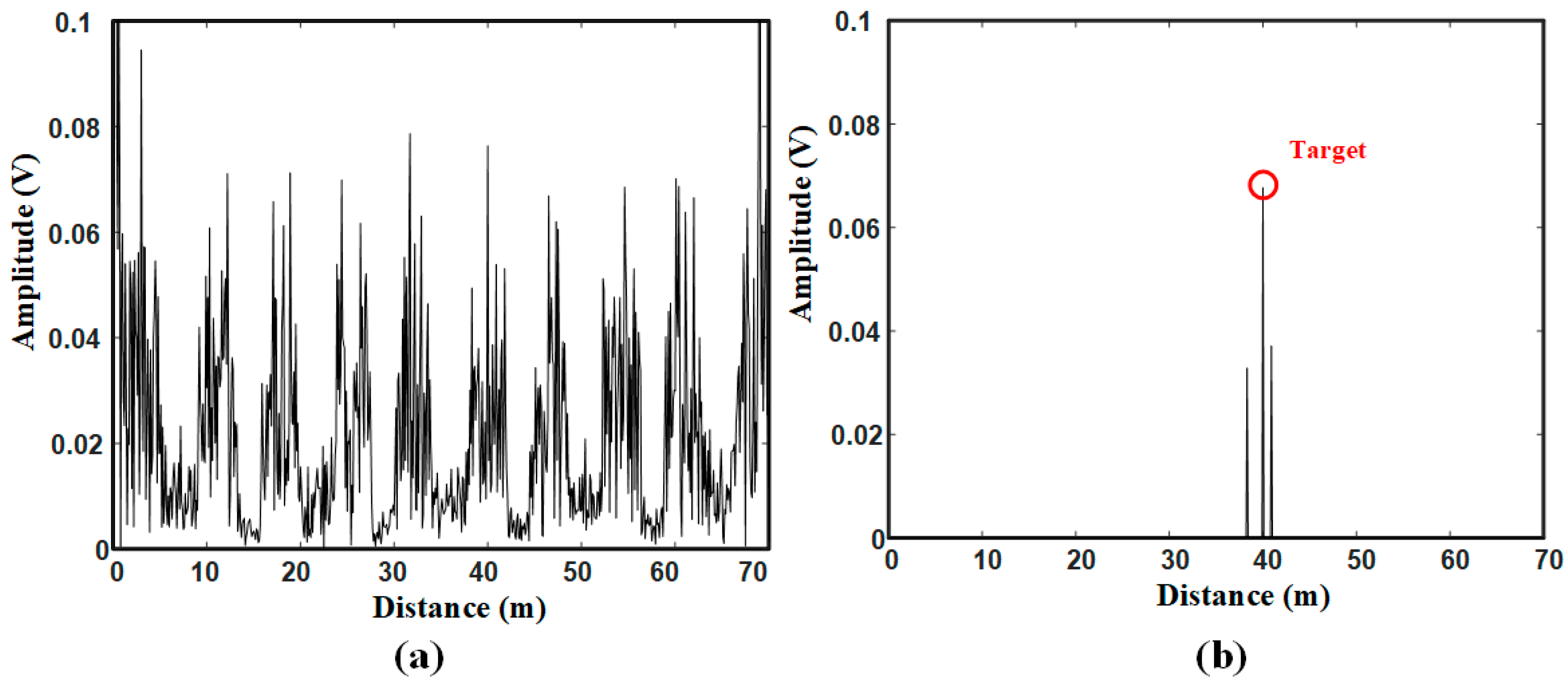
- The VMD-SVDD method can effectively suppress ground clutter signals and has the higher detection probability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yonemoto, N.; Kohmura, A.; Futatsumori, S.; Uebo, T.; Saillard, A. Broad band RF module of millimeter wave radar network for airport FOD detection system. In Proceedings of the 2009 International Radar Conference “Surveillance for a Safer World”, Bordeaux, France, 12–16 October 2009; pp. 1–4. [Google Scholar]
- Tarsier®: Automatic Runway FOD Detection System. Available online: https://www.tarsierfod.com/ (accessed on 19 December 2018).
- What Is FODetect? Available online: http://www.xsightsys.com/fodetect.html (accessed on 24 January 2018).
- FOD Finder™. Available online: https://www.xsightsys.com/index.php/fodetect/ (accessed on 4 January 2016).
- Zeitler, A.; Lanteri, J.; Pichot, C. Folded Reflectarrays With Shaped Beam Pattern for Foreign Object Debris Detection on Runways. IEEE Trans. Antennas Propag. 2010, 58, 3065–3068. [Google Scholar] [CrossRef]
- Futatsumori, S.; Morioka, K.; Kohmura, A. Design and Field Feasibility Evaluation of Distributed-Type 96 GHz FMCW Millimeter-Wave Radar Based on Radio-Over-Fiber and Optical Frequency Multiplier. J. Light. Technol. 2016, 34, 4835–4843. [Google Scholar] [CrossRef]
- Baoshuai, W.; Jianghong, L.; Xiaoliang, Z. A novel hierarchical foreign obeject debris detection method for millimeter wave radar. In Proceedings of the International Applied Computational Electromagnetics Society Symposium ACES IEEE, Firenze, Italy, 26–30 March 2017. [Google Scholar]
- Galati, G.; Ferri, M.; Marti, F. Advanced radar techniques for the air transport system: The surface movement miniradar concept. In Proceedings of the IEEE National Telesystems Conference, San Diego, CA, USA, 26–28 May 1994; pp. 331–338. [Google Scholar]
- Galati, G.; Leonardi, M.; Cavallin, A.; Pavan, G. Airport Surveillance Processing Chain for High Resolution Radar. IEEE Trans. Aero Elect. Syst. 2010, 46, 1522–1533. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Huo, K.; Zhang, X. A Clutter-Analysis-Based STAP for Moving FOD Detection on Runways. Sensors 2019, 19, 549. [Google Scholar] [CrossRef] [Green Version]
- Moustafa, A.; Ahmed, F.M.; Moustafa, K.H.; Halwagy, Y. A new CFAR processor based on guard cells information. In Proceedings of the IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 133–137. [Google Scholar] [CrossRef]
- Xiaoqi, Y. An Anti-FOD Method Based on CA-CM-CFAR for MMW Radar in Complex Clutter Background. Sensors 2020, 20, 1635. [Google Scholar] [CrossRef] [Green Version]
- Conte, E.; Longo, M.; Lops, M. Modelling and simulation of non-Rayleigh radar clutter. IEE Proc. F Radar Signal Process. 1991, 138, 121–130. [Google Scholar] [CrossRef]
- Baoshuai, W.; Minjue, H.; Jianghong, L.; Xiaoliang, Z. A Hierarchical FOD Detection Scheme Based on Clutter Map CFAR and Pattern Classification. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing ICSPCC, Qingdao, China, 14–17 September 2018; pp. 1–6. [Google Scholar]
- Ni, P.; Miao, C.; Tang, H. Small Foreign Object Debris Detection for Millimeter-Wave Radar Based on Power Spectrum Features. Sensors 2020, 20, 2316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Gok, G.; Alp, Y.K.; Altıparmak, F. Radar fingerprint extraction via variational mode decomposition. In Proceedings of the 25th Signal Processing and Communications Applications Conference SIU, Antalya, Turkey, 15–18 May 2017; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Long, J.; Wang, X.; Dai, D.; Tian, M.; Zhu, G.; Zhang, J. Denoising of UHF PD signals based on optimised VMD and wavelet transform. IET Sci. Meas. Technol. 2017, 11, 753–760. [Google Scholar] [CrossRef]
- Li, H.; Chang, J.; Xu, F.; Liu, Z.; Yang, Z.; Zhang, L.; Zhang, S.; Mao, R.; Dou, X.; Liu, B. Efficient Lidar Signal Denoising Algorithm Using Variational Mode Decomposition Combined with a Whale Optimization Algorithm. Remote Sens. 2019, 11, 126. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Liu, L. Whale Optimization Algorithm Based on Lamarckian Learning for Global Optimization Problems. IEEE Access 2019, 7, 36642–36666. [Google Scholar] [CrossRef]
- Görnitz, N.; Lima, L.A.; Müller, K.; Kloft, M.; Nakajima, S. Support Vector Data Descriptions and k-Means Clustering: One Class. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 3994–4006. [Google Scholar] [CrossRef] [PubMed]
- Geroleo, F.G.; Brandt-Pearce, M.; Brown, C.L. Detection and estimation of multi-pulse LFMCW radar signals. In Proceedings of the IEEE Radar Conference, Washington, DC, USA, 10–14 May 2010; pp. 1009–1013. [Google Scholar]
- Rilling, G.; Flandrin, P. One or two frequencies: The empirical mode decomposition answers. IEEE Trans. Signal. Process. 2008, 56, 85–95. [Google Scholar] [CrossRef] [Green Version]
- Chan, J.; Ma, H.; Saha, T.; Ekanayake, C. Self-adaptive partial discharge signal de-noising based on ensemble empirical mode decomposition and automatic morphological thresholding. IEEE Trans. Dielectr. Electr. Insul. 2014, 21, 294–303. [Google Scholar] [CrossRef]
- David, S.A.; Valentim, C.A., Jr. Fractional Euler-Lagrange Equations Applied to Oscillatory Systems. Mathematics 2015, 3, 258–272. [Google Scholar] [CrossRef] [Green Version]
- Xie, D.; Esmaiel, H.; Sun, H.; Qi, J.; Qasem, Z.A.H. Feature Extraction of Ship-Radiated Noise Based on Enhanced Variational Mode Decomposition, Normalized Correlation Coefficient and Permutation Entropy. Entropy 2020, 22, 468. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huan, Z.; Wei, C.; Li, G.H. Outlier Detection in Wireless Sensor Networks Using Model Selection-Based Support Vector Data Descriptions. Sensors 2018, 18, 4328. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Keerthi, S.S. Efficient tuning of SVM hyperparameters using radius/margin bound and iterative algorithms. IEEE Trans. Neural Netw. 2002, 13, 1225–1229. [Google Scholar] [CrossRef] [PubMed]
- Balasundaram, S.; Kapil, N. Application of Lagrangian Twin Support Vector Machines for Classification. In Proceedings of the 2nd International Conference on Machine Learning and Computing, Bangalore, India, 9–11 February 2010; pp. 193–197. [Google Scholar] [CrossRef]
- Munoz-Marf, J.; Bruzzone, L.; Camps-Vails, G. A support vector domain description approach to supervised classifification of remote sensing images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2683–2692. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| bandwidth | 1.5 GHz | antenna gain | 20 dBi |
| sampling frequency | 20 MHz | horizontal beam width | 1.9° |
| farthest monitoring distance | 70 m | pitch beam width | 5° |
| range resolution | 0.1 m | beam width in azimuth | 120° |
| FFT point number | 1024 | beam width in downward | 28° |
| frequency modulation cycle | 128 us | angular step | 12°/s |
| pulse accumulation number | 468 | cumulative time | 60 ms |
| Method | CA-CFAR | VMD-CACFAR | SVDD | VMD-SVDD |
|---|---|---|---|---|
| Run time (s) | 0.25 | 9.87 | 4.91 | 10.93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, J.; Gou, X.; Shu, Q.; Liu, X.; Zeng, Q. A FOD Detection Approach on Millimeter-Wave Radar Sensors Based on Optimal VMD and SVDD. Sensors 2021, 21, 997. https://doi.org/10.3390/s21030997
Zhong J, Gou X, Shu Q, Liu X, Zeng Q. A FOD Detection Approach on Millimeter-Wave Radar Sensors Based on Optimal VMD and SVDD. Sensors. 2021; 21(3):997. https://doi.org/10.3390/s21030997
Chicago/Turabian StyleZhong, Jun, Xin Gou, Qin Shu, Xing Liu, and Qi Zeng. 2021. "A FOD Detection Approach on Millimeter-Wave Radar Sensors Based on Optimal VMD and SVDD" Sensors 21, no. 3: 997. https://doi.org/10.3390/s21030997