
Development of an Automated Minimum Foot Clearance Measurement System: Proof of Principle


Abstract
:1. Introduction
1.1. MFC Measurement
1.2. Objective
2. Methods
- It can easily collect large amounts of data quickly from many pedestrians
- The measured MFC values will represent the lowest point of the entire foot
- The system is marker-less, there is no need for attaching markers to the participants or control the environment in any way
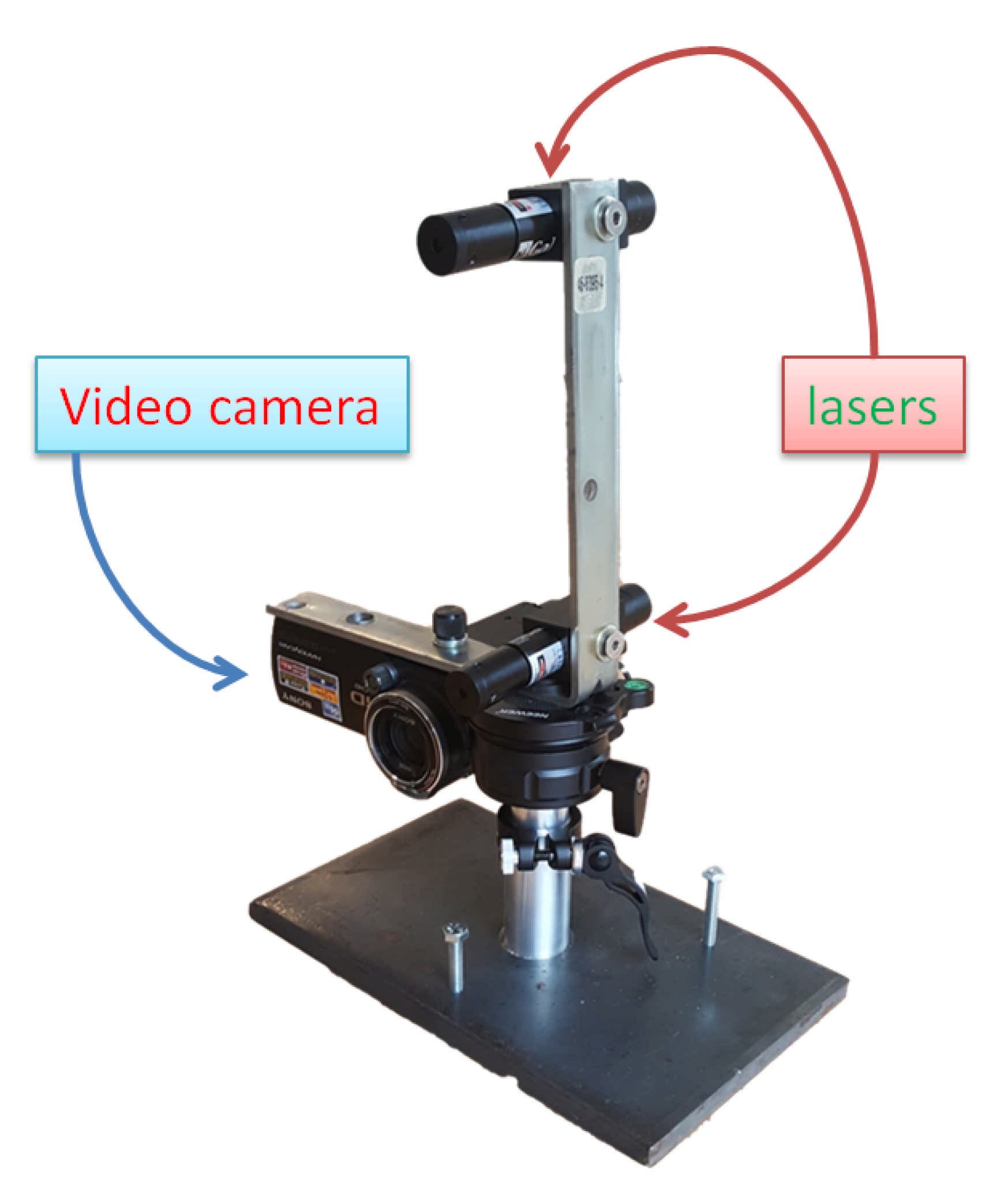
- It utilizes a simple and relatively low-cost equipment (consumer grade video camera and two lasers)
- The pedestrians are not aware of the device recording them therefore this measurement will not affect their walking performance
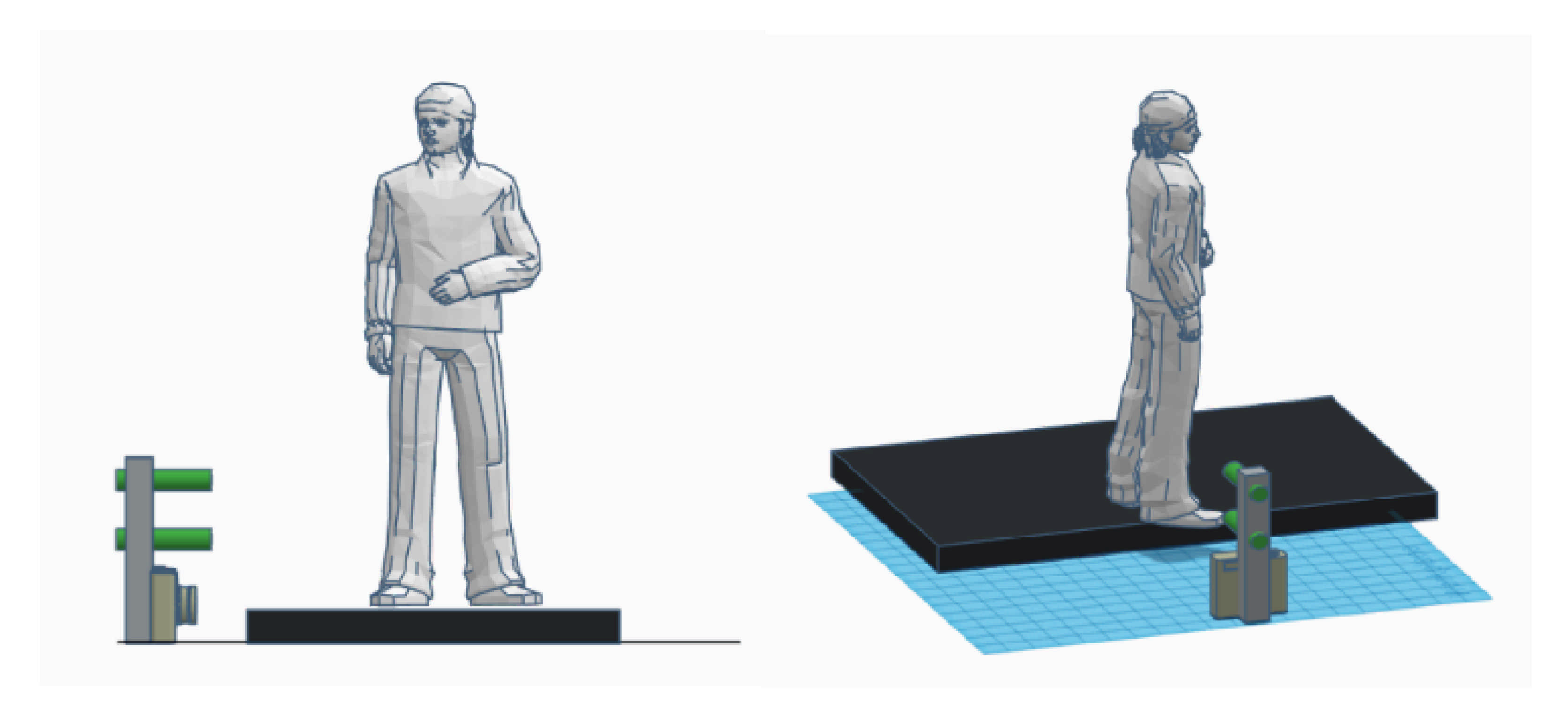
2.1. Data Collection Module
2.2. Data Analysis
2.2.1. Manual Analysis of MFCE Video Data
2.2.2. Automated Analysis of MFCE Video Data
- The laser dots were among the brightest points in the entire image
- The two lasers were aligned nearly vertically within the 2D video image
- The laser points were circular
2.3. Comparison of Manual and Automated Methods
- Locate the laser points: The raters were asked to record the frame number in each video clip where the laser points were projected onto each pedestrian’s lower leg or foot and click the centre of each to record their 2D coordinates in pixels using MB Ruler.
- Locate the ground plane: The raters were asked to define the ground plane in each video clip by clicking on two points to record their coordinates.
- Locate the frame where the MFC occurred and estimate the distance to the ground plane that was defined previously.
3. Results and Discussion
3.1. Performance of the Three Automated Subsystems
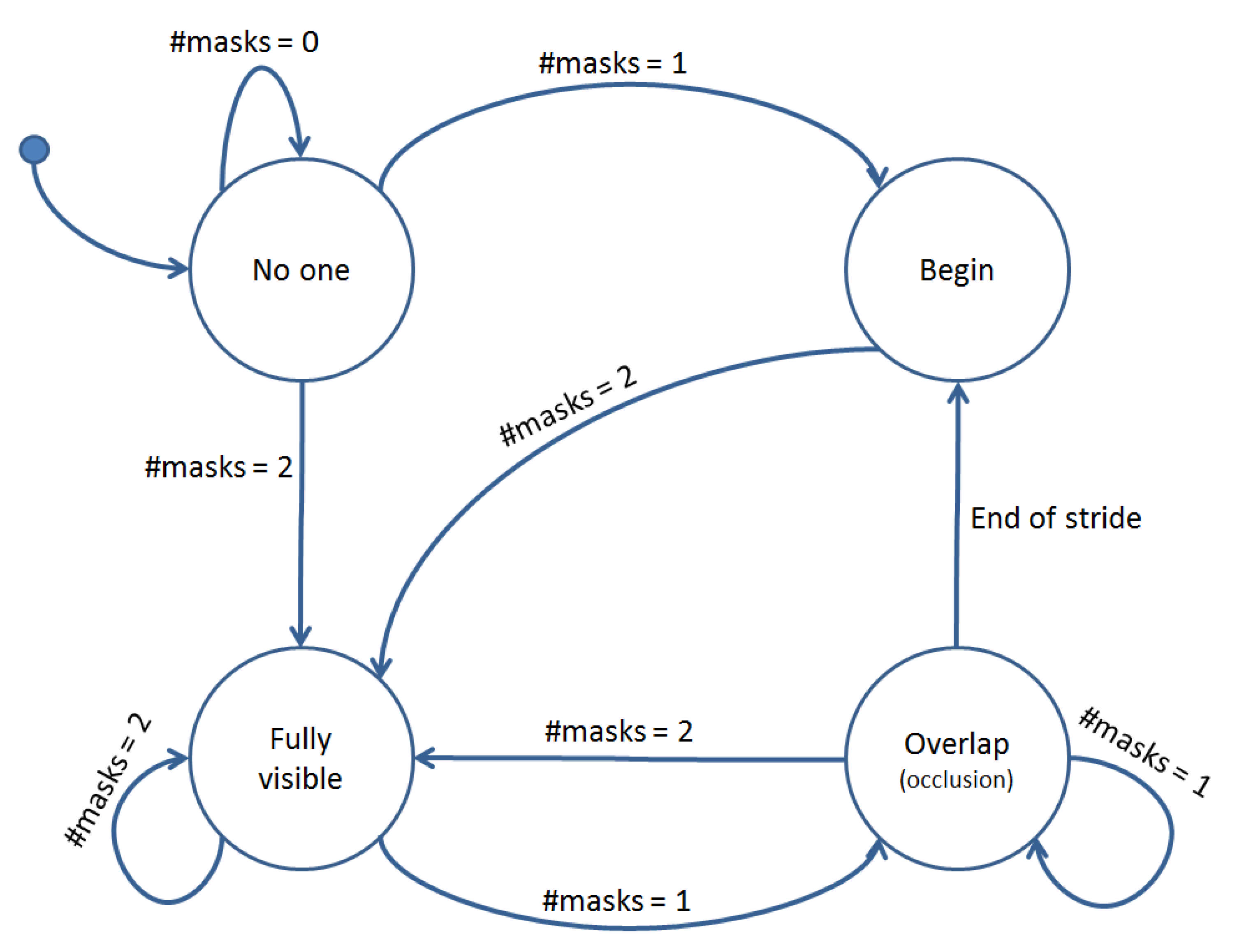
3.1.1. Footwear Detection
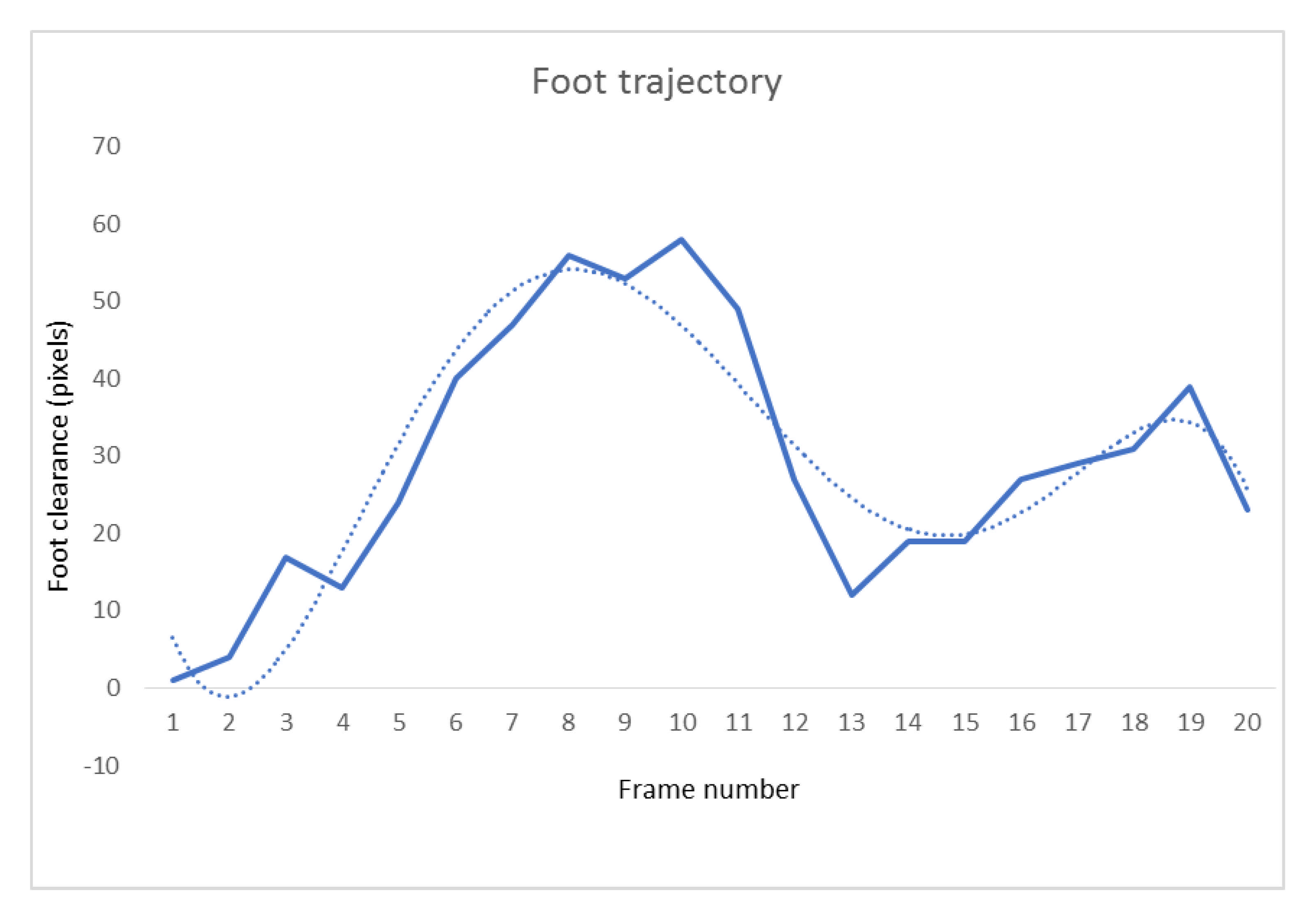
3.1.2. Finding the MFC Point in the Swing Foot Trajectory
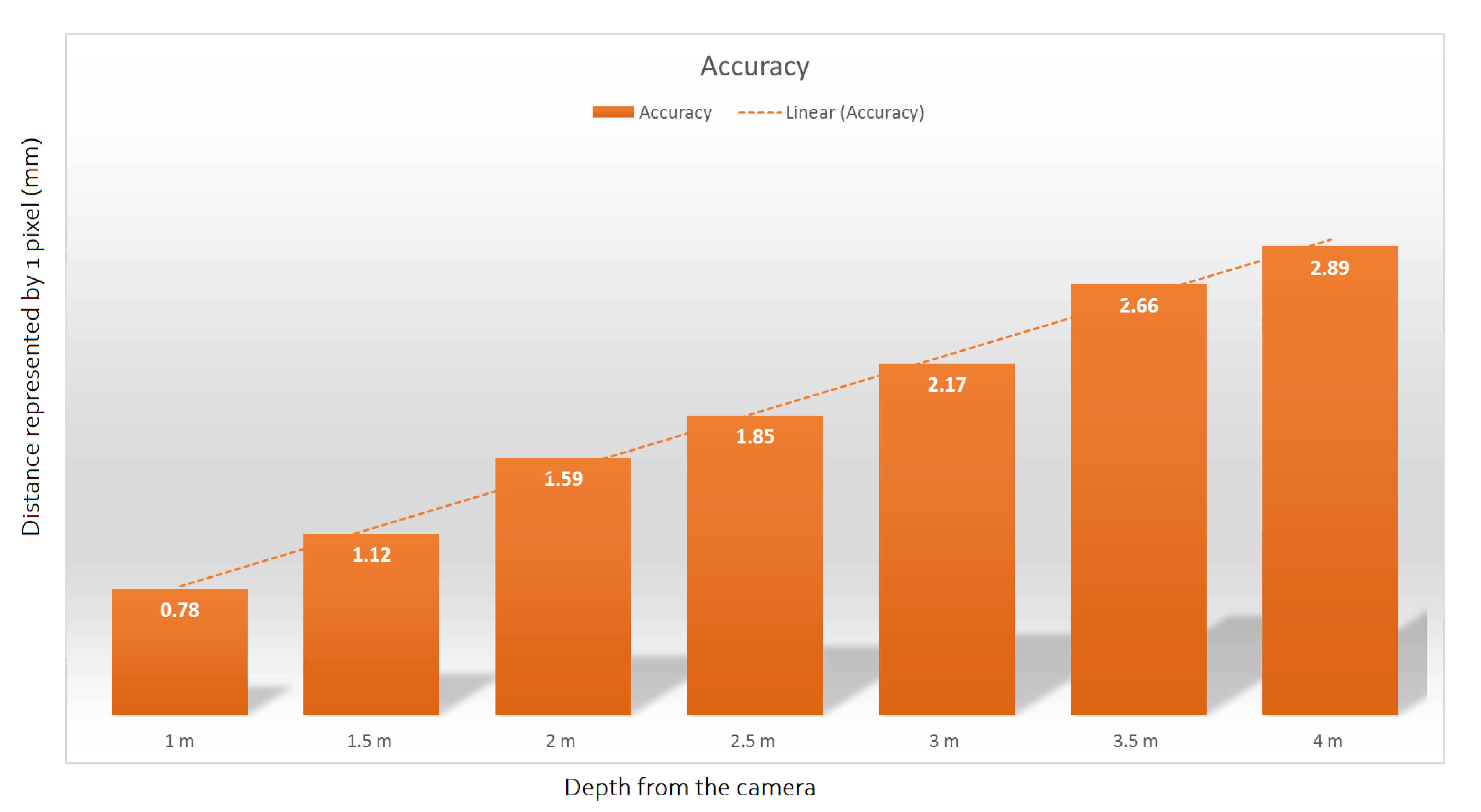
3.1.3. Laser Dot Location Detection
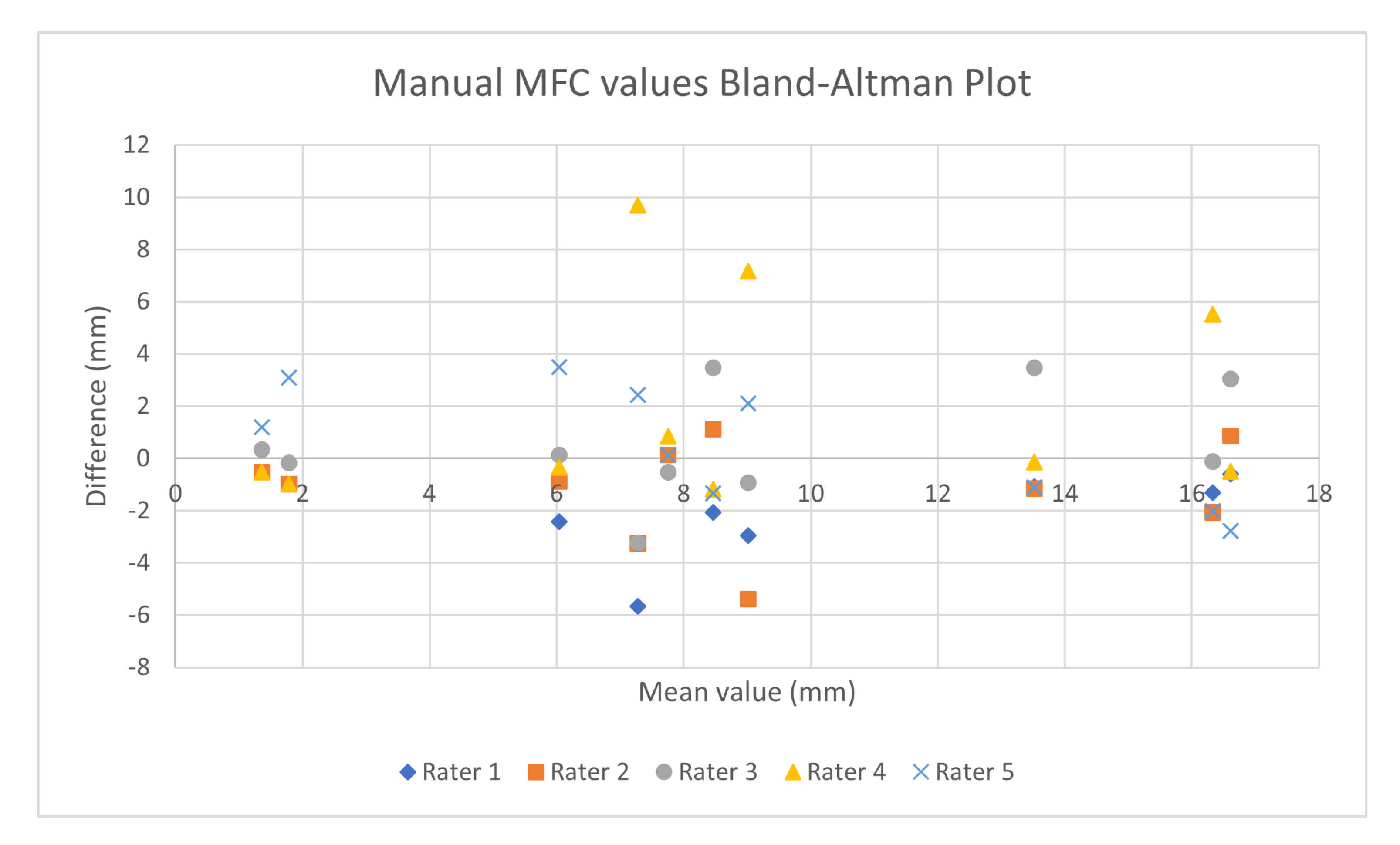
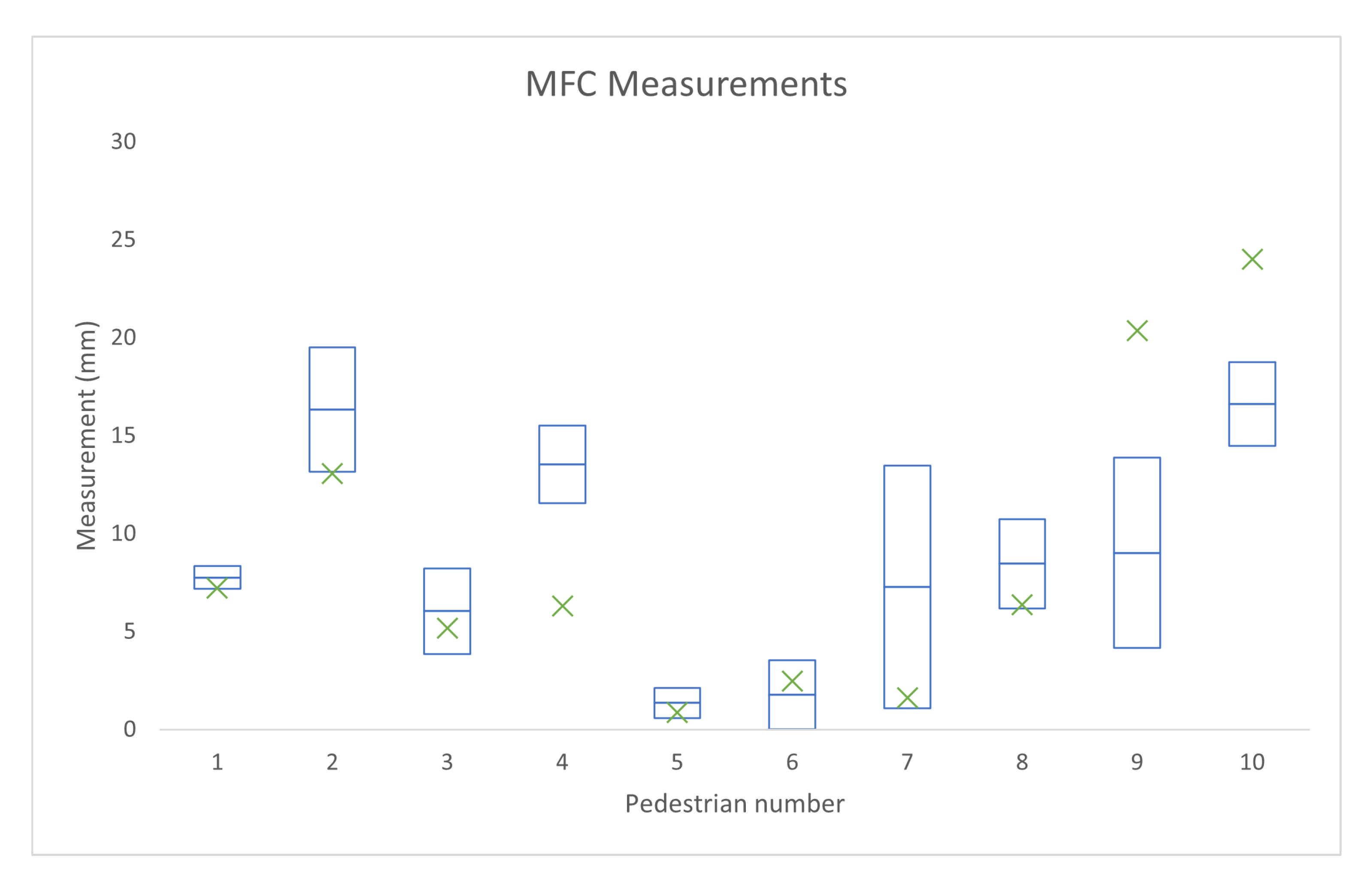
3.2. Comparison of Manual and Automated Methods
3.3. Limitations
3.3.1. Systematic Errors
3.3.2. Validation
3.4. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Heron, M. Deaths: Leading Causes for 2011. 2015. Available online: https://www.cdc.gov/nchs/data/nvsr/nvsr59/nvsr59_08.pdf (accessed on 22 December 2020).
- Web Based Injury Statistics Reporting System. Available online: https://wisqars-viz.cdc.gov:8006/non-fatal/explore/selected-years (accessed on 22 December 2020).
- Alexander, B.H.; Rivara, F.P.; Wolf, M.E. The cost and frequency of hospitalization for fall-related injuries in older adults. Am. J. Public Health 1992, 82, 1020–1023. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sterling, D.A.; O’connor, J.A.; Bonadies, J. Geriatric falls: Injury severity is high and disproportionate to mechanism. J. Trauma Acute Care Surg. 2001, 50, 116–119. [Google Scholar] [CrossRef] [PubMed]
- Blake, A.; Morgan, K.; Bendall, M.; Dallosso, H.; Ebrahim, S.; Arie, T.; Fentem, P.; Bassey, E. Falls by elderly people at home: Prevalence and associated factors. Age Ageing 1988, 17, 365–372. [Google Scholar] [CrossRef] [PubMed]
- Barrett, R.; Mills, P.; Begg, R. A systematic review of the effect of ageing and falls history on minimum foot clearance characteristics during level walking. Gait Posture 2010, 32, 429–435. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A. Foot trajectory in human gait: A precise and multifactorial motor control task. Phys. Ther. 1992, 72, 45–53. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A. Biomechanics and Motor Control of Human Gait: Normal, Elderly and Pathological; University of Waterloo Press: Waterloo, ON, USA, 1991. [Google Scholar]
- Schulz, B.W.; Lloyd, J.D.; Lee, W.E. The effects of everyday concurrent tasks on overground minimum toe clearance and gait parameters. Gait Posture 2010, 32, 18–22. [Google Scholar] [CrossRef] [Green Version]
- Americans with Disabilities Act (ADA) Standards. Available online: https://www.ada.gov/2010ADAstandards_index.htm (accessed on 22 December 2020).
- Toronto, C.O. Accessibility Design Guidelines. 2004. Available online: http://publiccommons.ca/public/uploads/accessibility_design_guidelines.pdf (accessed on 22 December 2020).
- Best, R.; Begg, R. A method for calculating the probability of tripping while walking. J. Biomech. 2008, 41, 1147–1151. [Google Scholar] [CrossRef] [PubMed]
- Scanlon, J.M. Comparing Gait between Outdoors and Inside a Laboratory. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2014. [Google Scholar]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. arXiv 2015, arXiv:1506.01497. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdulla, W. Mask R-CNN for Object Detection and Instance Segmentation on Keras and TensorFlow. 2017. Available online: https://github.com/matterport/Mask_RCNN (accessed on 22 December 2020).
- Begg, R.; Best, R.; Dell’Oro, L.; Taylor, S. Minimum foot clearance during walking: Strategies for the minimisation of trip-related falls. Gait Posture 2007, 25, 191–198. [Google Scholar] [CrossRef] [PubMed]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| GPU count | 1 |
| Images per GPU | 2 |
| Steps per epoch | 1000 |
| Validation step | 50 |
| Learning rate | 0.001 |
| Weight decay | 0.0001 |
| Back bone | ResNet101 |
| FPN layers’ size | 1024 |
| RPN NMS threshold | 0.7 |
| Number of classes | 1 |
| Anchors per image | 256 |
| Detection minimum confidence | 0.7 |
| MFC Values (mm) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Manual mean | 7.76 | 16.33 | 6.04 | 13.52 | 1.36 | 1.79 | 7.28 | 8.46 | 9.89 | 16.61 |
| Manual STD | 0.57 | 3.19 | 2.18 | 1.98 | 0.77 | 1.76 | 6.19 | 2.28 | 5.04 | 2.14 |
| Manual RMS | 0.51 | 2.85 | 1.95 | 1.77 | 0.69 | 5.54 | 1.58 | 2.04 | 4.34 | 1.91 |
| Auto RMS | 0.56 | 3.26 | 0.86 | 7.23 | 0.50 | 5.66 | 0.67 | 2.09 | 11.34 | 7.40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delfi, G.; Kamachi, M.; Dutta, T. Development of an Automated Minimum Foot Clearance Measurement System: Proof of Principle. Sensors 2021, 21, 976. https://doi.org/10.3390/s21030976
Delfi G, Kamachi M, Dutta T. Development of an Automated Minimum Foot Clearance Measurement System: Proof of Principle. Sensors. 2021; 21(3):976. https://doi.org/10.3390/s21030976
Chicago/Turabian StyleDelfi, Ghazaleh, Megan Kamachi, and Tilak Dutta. 2021. "Development of an Automated Minimum Foot Clearance Measurement System: Proof of Principle" Sensors 21, no. 3: 976. https://doi.org/10.3390/s21030976