
Instantaneous, Dual-Frequency, Multi-GNSS Precise RTK Positioning Using Google Pixel 4 and Samsung Galaxy S20 Smartphones for Zero and Short Baselines

 ,
,  ,
,
Abstract
:1. Introduction
2. The Multi-GNSS, Dual Frequency, Single-Baseline RTK Functional Model
3. GNSS Data Collection with Android-Based Smartphones
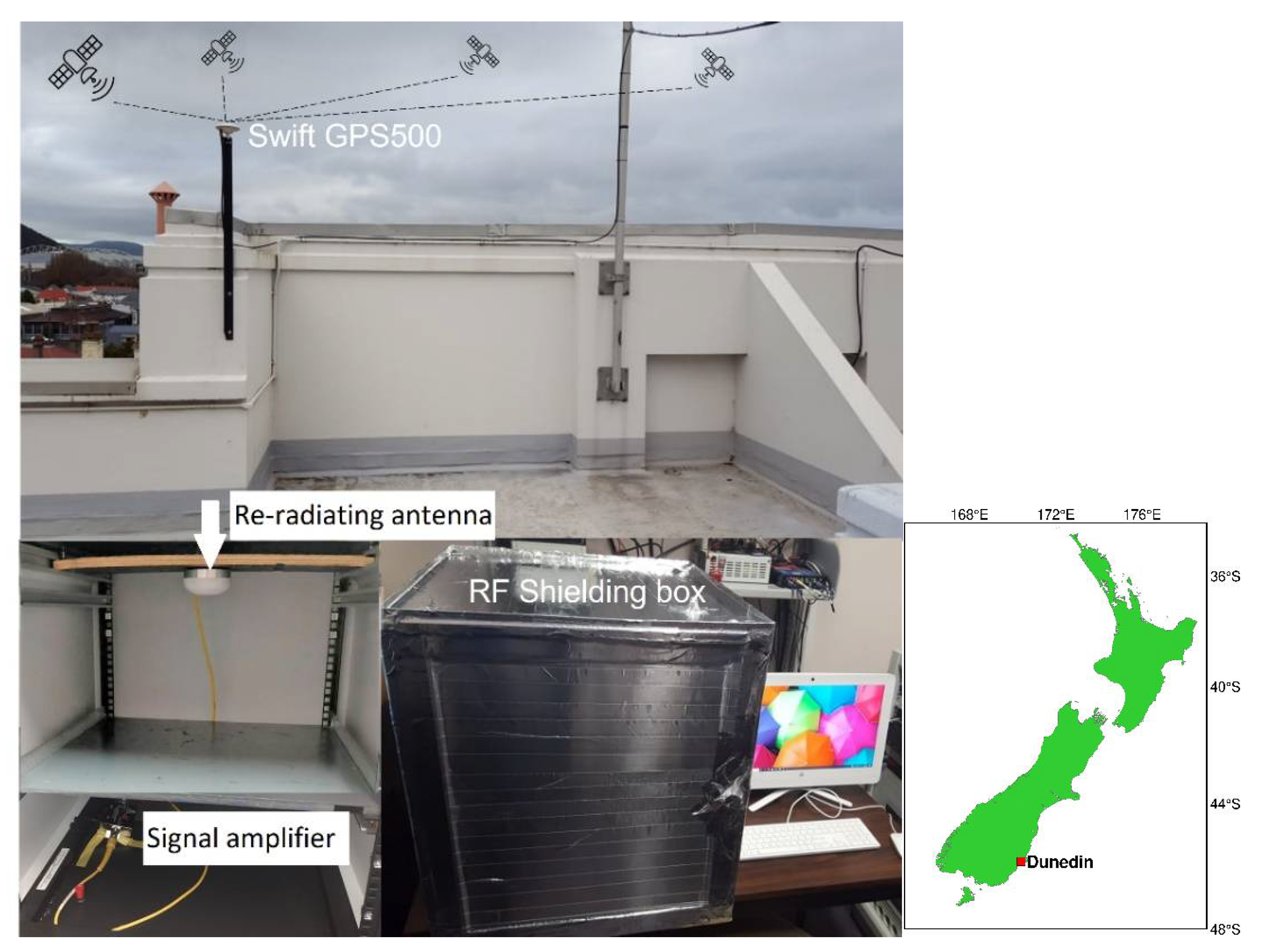
3.1. General Setup Configuration with External Antennas
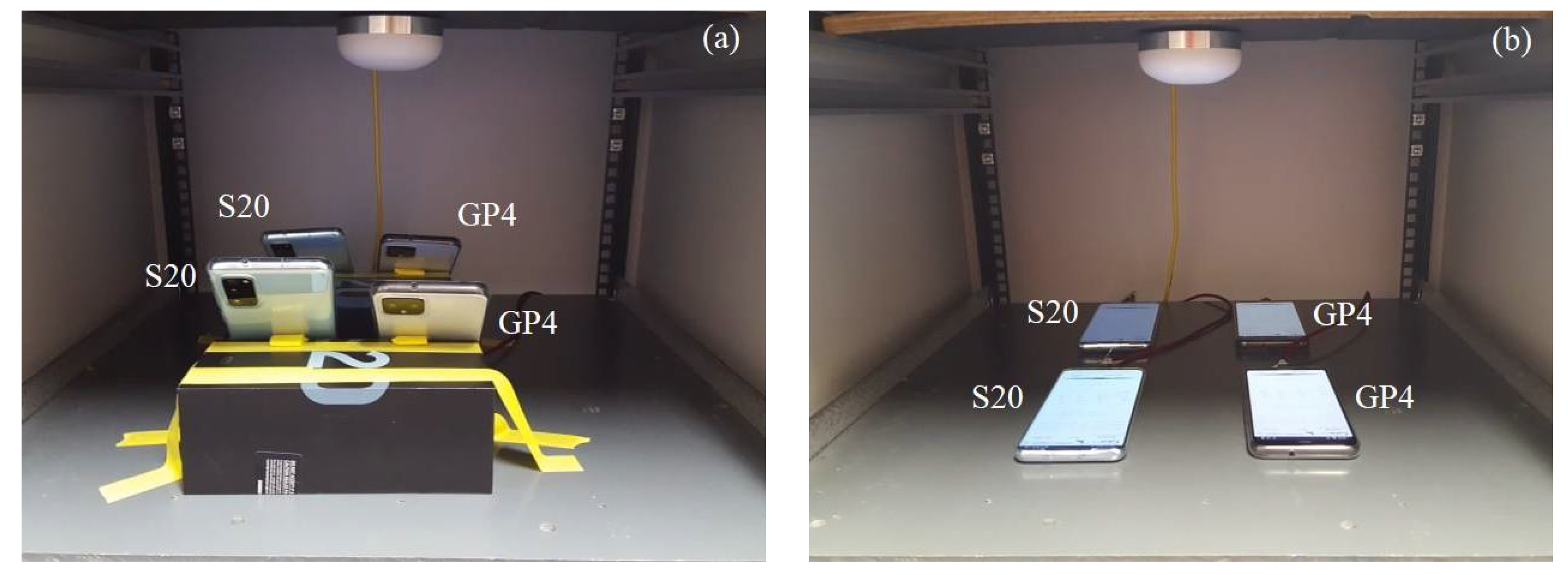
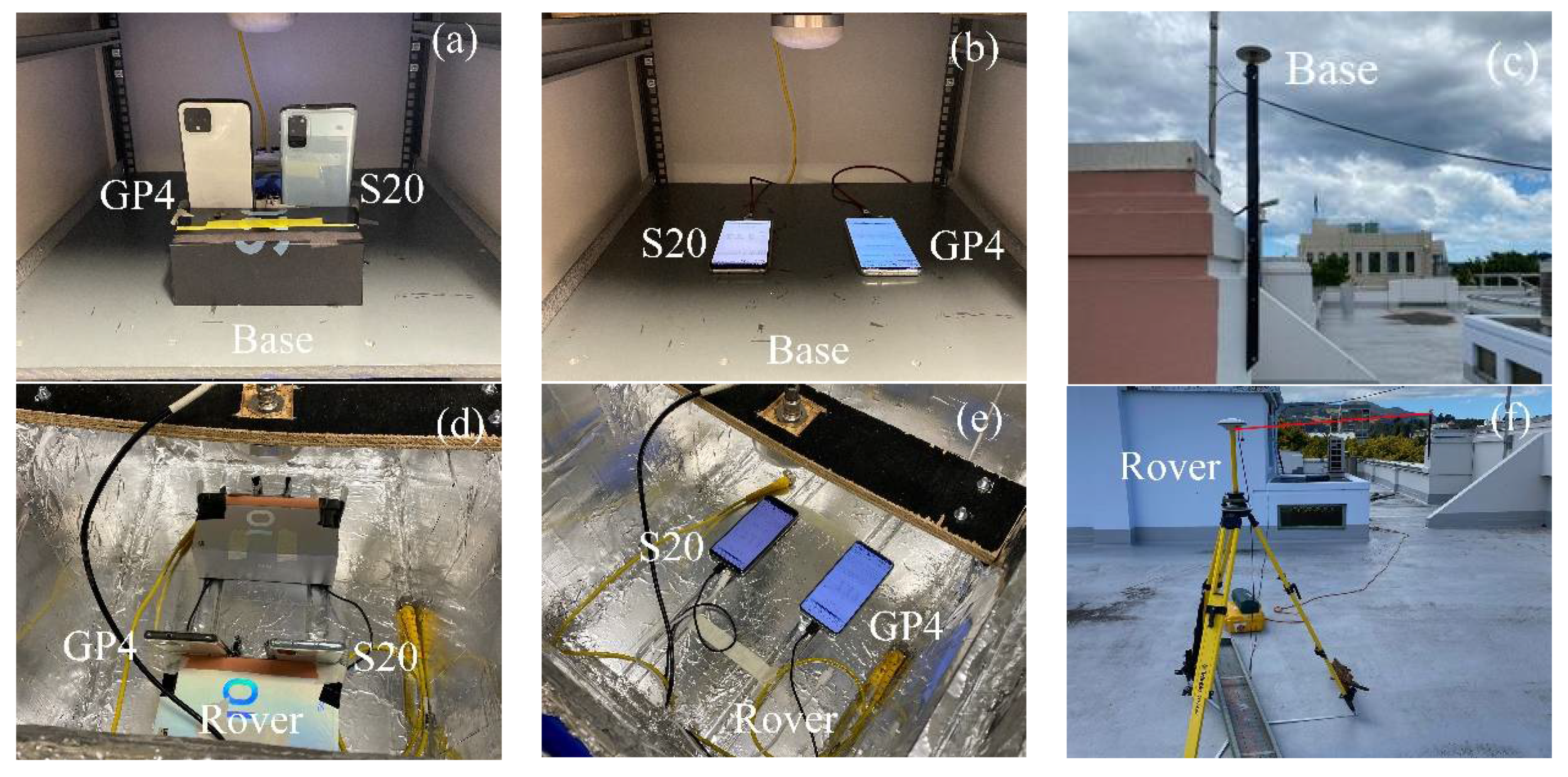
3.2. The ‘Upright’ and ‘Lying Down’ Setup Configurations
3.3. Stochastic Model Settings
4. Zero-Baseline Instantaneous RTK Positioning with Smartphones in Lying Down and Upright Positions
5. Short-Baseline Instantaneous RTK Performance with Smartphones in Lying Down and Upright Positions
5.1. Double-Differenced Carrier-Phase Residuals for Short-Baselines Using External Antennas
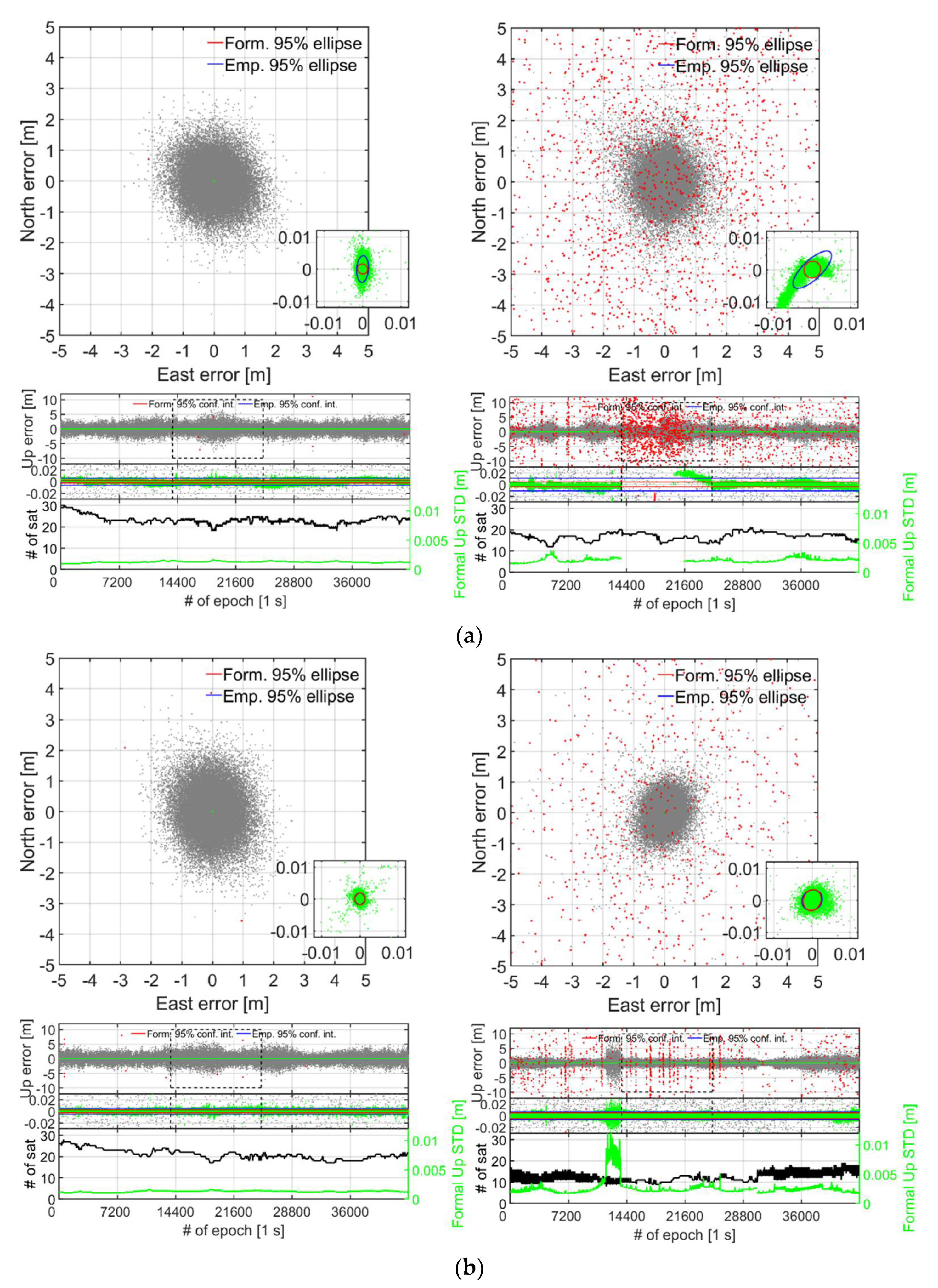
5.2. Instantaneous RTK Positioning Performance for Short-Baselines with External and Internal Antennas
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mongredien, C.; Doyen, J.P.; Strom, M.; Ammann, D. Centimeter level positioning for UAVs and other mass-market applications. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016. [Google Scholar]
- Nie, Z.; Liu, F.; Gao, Y. Real-time precise point positioning with a low-cost dual-frequency GNSS device. GPS Solut. 2020, 24, 9. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G. Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: A low-cost and high-grade receivers GPS-BDS RTK analysis. J. Geod. 2016, 90, 1255–1278. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G. Best integer equivariant estimation: Performance analysis using real data collected by low-cost, single- and dual-frequency, multi-GNSS receivers for short- to long-baseline RTK positioning. J. Geod. 2020, 94, 91. [Google Scholar] [CrossRef]
- Van Diggelen, F. The Smartphone Revolution: Seven Technologies that Put GPS in Mobile Phones around the World—The How and Why of Location’s Entry into Modern Consumer Mobile Communications. GPS World 2009. Available online: https://www.gpsworld.com/wirelesssmartphone-revolution-9183/ (accessed on 9 December 2021).
- Odolinski, R.; Teunissen, P.J.G. An assessment of smartphone and low-cost multi-GNSS single-frequency RTK positioning for low, medium and high ionospheric disturbance periods. J. Geod. 2019, 93, 701–722. [Google Scholar] [CrossRef] [Green Version]
- Paziewski, J. Recent advances and perspectives for positioning and applications with smartphone GNSS observations. Meas. Sci. Technol. 2020, 31, 091001. [Google Scholar] [CrossRef]
- Pesyna, K.M.; Heath, R.W.; Humphreys, T.E. Centimeter Positioning with a Smartphone-Quality GNSS Antenna. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 1568–1577. [Google Scholar]
- Humphreys, T.E.; Murrian, M.; van Diggelen, F.; Podshivalov, S.; Pesyna, K.M. On the feasibility of cm-accurate positioning via a smartphone’s antenna and GNSS chip. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium, Savannah, GA, USA, 11–16 April 2016; pp. 232–242. [Google Scholar]
- Håkansson, M. Characterization of GNSS observations from a Nexus 9 Android tablet. GPS Solut. 2019, 23, 21. [Google Scholar] [CrossRef] [Green Version]
- Warnant, R.; van de Vyvere, L.; Warnant, Q. Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later. In Proceedings of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 284–303. [Google Scholar]
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results. Measurement 2021, 175, 109162. [Google Scholar] [CrossRef]
- Hesselbarth, A.; Wanninger, L. Towards centimeter accurate positioning with smartphones. In Proceedings of the 2020 European Navigation Conference (ENC), Dresden, Germany, 23–24 November 2020; pp. 1–8. [Google Scholar]
- Geng, J.; Li, G. On the feasibility of resolving Android GNSS carrier-phase ambiguities. J. Geod. 2019, 93, 2621–2635. [Google Scholar] [CrossRef]
- Gao, R.; Xu, L.; Zhang, B.; Liu, T. Raw GNSS observations from Android smartphones: Characteristics and short-baseline RTK positioning performance. Meas. Sci. Technol. 2021, 32, 084012. [Google Scholar] [CrossRef]
- Riley, S.; Lentz, W.; Clare, A. On the Path to Precision—Observations with Android GNSS Observables. In Proceedings of the 30th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 116–129. [Google Scholar]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [Green Version]
- Aggrey, J.; Bisnath, S.; Naciri, N.; Shinghal, G.; Yang, S. Multi-GNSS precise point positioning with next-generation smartphone measurements. J. Spat. Sci. 2019, 65, 79–98. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Quality analysis of a combined COMPASS/BeiDou-2 and GPS RTK positioning model. In Proceedings of the International Global Navigation Satellite Systems Society IGNSS Symposium 2013, Golden Coast, Australia, 16–18 July 2013. [Google Scholar]
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 navigation satellite system. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G. Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut. 2012, 17, 521–533. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2015, 19, 151–163. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Jeju, Korea, 4 November 2009; pp. 1–6. [Google Scholar]
- Fletcher, D. Trimble: Personal Communication. 19 October 2021. Available online: https://upa.trimble.com/en/products/end-customer-communications (accessed on 9 December 2021).
- Ito, A. (Geo++). Personal Communication. 2020. Available online: https://apastyle.apa.org/style-grammar-guidelines/citations/personal-communications (accessed on 9 December 2021).
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. First combined COMPASS/BeiDou-2 and GPS positioning results in Australia. Part II: Single- and multiple-frequency single-baseline RTK positioning. J. Spat. Sci. 2014, 59, 25–46. [Google Scholar] [CrossRef]
- Axelrad, P.; Larson, K.; Jones, B. Use of the correct satellite repeat period to characterize and reduce site-specific multipath errors. In Proceedings of the ION GNSS 18th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Amiri-Simkooei, A.R.; Tiberius, C.C.J.M. Assessing receiver noise using GPS short baseline time series. GPS Solut. 2007, 11, 21–35. [Google Scholar] [CrossRef] [Green Version]
- Khodabandeh, A.; Zaminpardaz, S.; Nadarajah, N. A study on multi-GNSS phase-only positioning. Meas. Sci. Technol. 2021, 32, 095005. [Google Scholar] [CrossRef]
- Guo, L.; Wang, F.; Sang, J.; Lin, X.; Gong, X.; Zhang, W. Characteristics Analysis of Raw Multi-GNSS Measurement from Xiaomi Mi 8 and Positioning Performance Improvement with L5/E5 Frequency in an Urban Environment. Remote Sens. 2020, 12, 744. [Google Scholar] [CrossRef] [Green Version]
- De Bakker, P.F.; Tiberius, C.C.; van der Marel, H.; van Bree, R.J. Short and zero baseline analysis of GPS L1 C/A, L5Q, GIOVE E1B, and E5aQ signals. GPS Solut. 2012, 16, 53–64. [Google Scholar] [CrossRef] [Green Version]
- Darugna, F.; Wübbena, J.; Ito, A.; Wübbena, T.; Wübbena, G.; Schmitz, M. RTK and PPP-RTK Using Smartphones: From Short-Baseline to Long-Baseline Applications. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3932–3945. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site ID | Receiver | Chipset | Constellations | Frequencies |
|---|---|---|---|---|
| SGD1 | Samsung Galaxy S20 | Broadcom BCM47755 | GPS, Galileo, QZSS, BDS | L1 + L5, E1 + E5a, L1 + L5, B1 |
| SGD2 | ||||
| GPD1 | Google Pixel 4 | Qualcomm Snapdragon 855 embedded | GPS, Galileo, QZSS, BDS | L1 + L5, E1 + E5a, L1 + L5, B1 |
| GPD2 | ||||
| UBX1 | Blox | F9P | GPS, Galileo, QZSS, BDS | L1 + L2, E1 + E5b, L1 + L2, B1 + B2 |
| UBX2 | ||||
| TRD1 | Trimble NetR9 | MaxwellTM 6 | GPS, Galileo, QZSS, BDS | L1 + L2, E1 + E5b, L1 + L2, B1 + B2 + B3 |
| TRD2 |
| Baselines | Phase STD (m) | Code STD (m) | Description | DOY, Hours of Data, hh:mm:ss UTC |
|---|---|---|---|---|
| Zero-baseline external antenna: | ||||
| GPD1–GPD2 | 0.001 | 0.457 | Smartphones in upright (Figure 2a) and lying down (Figure 2b) positions. | 2020 (12 h): 305, 01:16:00–13:15:59 [298, 01:44:00–13:43:59] |
| SGD1–SGD2 | 0.001 | 0.175 | ||
| Short-baseline external antennas: | ||||
| GPD1-GPD2 | 0.002 | 1.198 | Smartphones in upright (Figure 3a,d) and lying down (Figure 3b,e) positions. | 2021 (8 h): 228, 13:35:00–21:34:59 [258, 11:35:00–19:34:59] |
| SGD1–SGD2 | 0.003 | 0.485 | ||
| Short-baseline internal antennas: | ||||
| GPD1-GPD2 | 0.004 | 5.997 | Smartphones in upright (Figure 4a,b) and lying down (Figure 4c,d) positions. | 2020 (3.5 h): 344–345, 21:10:00– 00:41:59 2021 (3.5 h): [261, 02:18:00–05:49:00] |
| SGD1–SGD2 | 0.003 | 2.327 | ||
| Baselines | Setup | ILS SR (%) | Avg. # of Sat. | Mean RMS of DD Phase [Code] Residuals (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean ± STDs (m) | GPS | QZSS | ||||||||||
| Correctly Fixed | Float | L1 | L2 | L5 | L1 | L2 | L5 | |||||
| GPD1–GPD2 | upright | 99.9 | 21 | E | 0.000 ± 0.001 | −0.014 ± 0.580 | 0.003 [2.479] | - | 0.003 [0.243] | 0.004 [2.319] | - | 0.003 [0.248] |
| N | 0.000 ± 0.001 | 0.004 ± 0.702 | ||||||||||
| U | 0.004 ± 0.003 | 0.006 ± 1.429 | ||||||||||
| GPD1–GPD2 | lying down | 99.9 | 23 | E | 0.000 ± 0.001 | 0.006 ± 0.599 | 0.005 [2.543] | - | 0.004 [0.312] | 0.004 [2.323] | - | 0.004 [0.274] |
| N | 0.000 ± 0.002 | −0.005 ± 0.627 | ||||||||||
| U | −0.008 ± 0.003 | −0.030 ± 1.429 | ||||||||||
| SGD1–SGD2 | upright | 97.8 | 13 | E | 0.000 ± 0.001 | 0.005 ± 0.338 | 0.005 [1.401] | - | 0.005 [1.119] | 0.005 [1.043] | - | 0.006 [0.932] |
| N | 0.000 ± 0.001 | −0.011 ± 0.411 | ||||||||||
| U | 0.001 ± 0.003 | −0.017 ± 0.920 | ||||||||||
| SGD1–SGD2 | lying down | 79.4 | 17 | E | 0.000 ± 0.002 | −0.019 ± 0.473 | 0.012 [2.053] | - | 0.016 [2.028] | 0.013 [1.735] | - | 0.013 [1.644] |
| N | 0.001 ± 0.002 | 0.001 ± 0.555 | ||||||||||
| U | −0.004 ± 0.006 | −0.017 ± 1.251 | ||||||||||
| TRM1–TRM2 | upright | 99.9 | 25 | E | 0.000 ± 0.001 | 0.004 ± 0.215 | 0.004 [0.586] | 0.003 [0.525] | - | 0.006 [0.569] | 0.002 [0.404] | - |
| N | 0.000 ± 0.001 | 0.000 ± 0.238 | ||||||||||
| U | 0.000 ± 0.002 | 0.045 ± 0.576 | ||||||||||
| UBX1–UBX2 | upright | 100.0 | 25 | E | 0.000 ± 0.001 | −0.027 ± 0.158 | 0.005 [0.303] | 0.005 [1.022] | - | 0.004 [0.441] | 0.004 [0.843] | - |
| N | 0.000 ± 0.001 | 0.032 ± 0.198 | ||||||||||
| U | −0.010 ± 0.002 | 0.046 ± 0.352 | ||||||||||
| Baselines | Antenna Type | Setup | ILS SR (%) | Avg. # of Sat. | Mean ± STDs (m) | ||
|---|---|---|---|---|---|---|---|
| Correctly Fixed | Float | ||||||
| GPD1–GPD2 | External | upright | 99.9 | 24 | E | −0.001 ± 0.002 | −0.105 ± 1.200 |
| N | −0.000 ± 0.002 | 0.375 ± 1.294 | |||||
| U | −0.000 ± 0.005 | −0.121 ± 2.567 | |||||
| lying down | 99.9 | 20 | E | −0.001 ± 0.002 | −0.016 ± 1.243 | ||
| N | −0.001 ± 0.002 | 0.238 ± 1.312 | |||||
| U | −0.002 ± 0.005 | 0.048 ± 2.644 | |||||
| Internal | upright | 98.7 | 21 | E | 0.001 ± 0.005 | −0.222 ± 2.977 | |
| N | −0.001 ± 0.006 | 0.209 ± 3.483 | |||||
| U | 0.001 ± 0.010 | 0.370 ± 5.518 | |||||
| lying down | 63.1 | 16 | E | −0.002 ± 0.008 | −0.098 ± 2.909 | ||
| N | −0.000 ± 0.005 | 0.086 ± 2.516 | |||||
| U | −0.002 ± 0.013 | −0.907 ± 4.282 | |||||
| SGD1–SGD2 | External | upright | 99.2 | 15 | E | 0.000 ± 0.003 | −0.031 ± 0.729 |
| N | −0.000 ± 0.006 | 0.091 ± 1.013 | |||||
| U | −0.005 ± 0.009 | −0.050 ± 1.730 | |||||
| lying down | 94.9 | 20 | E | 0.006 ± 0.006 | −0.037 ± 0.707 | ||
| N | 0.002 ± 0.007 | 0.043 ± 0.939 | |||||
| U | 0.001 ± 0.010 | −0.124 ± 1.874 | |||||
| Internal | upright | 64.4 | 16 | E | 0.001 ± 0.005 | −0.222 ± 2.977 | |
| N | −0.001 ± 0.006 | 0.210 ± 3.483 | |||||
| U | −0.001 ± 0.010 | 0.274 ± 4.677 | |||||
| lying down | 27.5 | 17 | E | 0.001 ± 0.004 | −0.157 ± 1.531 | ||
| N | 0.002 ± 0.005 | 0.103 ± 2.499 | |||||
| U | −0.006 ± 0.011 | −0.214 ± 3.384 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yong, C.Z.; Odolinski, R.; Zaminpardaz, S.; Moore, M.; Rubinov, E.; Er, J.; Denham, M. Instantaneous, Dual-Frequency, Multi-GNSS Precise RTK Positioning Using Google Pixel 4 and Samsung Galaxy S20 Smartphones for Zero and Short Baselines. Sensors 2021, 21, 8318. https://doi.org/10.3390/s21248318
Yong CZ, Odolinski R, Zaminpardaz S, Moore M, Rubinov E, Er J, Denham M. Instantaneous, Dual-Frequency, Multi-GNSS Precise RTK Positioning Using Google Pixel 4 and Samsung Galaxy S20 Smartphones for Zero and Short Baselines. Sensors. 2021; 21(24):8318. https://doi.org/10.3390/s21248318
Chicago/Turabian StyleYong, Chien Zheng, Robert Odolinski, Safoora Zaminpardaz, Michael Moore, Eldar Rubinov, Jeremiah Er, and Mike Denham. 2021. "Instantaneous, Dual-Frequency, Multi-GNSS Precise RTK Positioning Using Google Pixel 4 and Samsung Galaxy S20 Smartphones for Zero and Short Baselines" Sensors 21, no. 24: 8318. https://doi.org/10.3390/s21248318