1. Introduction
One of the founding principles in the Industry 4.0 paradigm is the emphasis on the autonomy of the agents participating in the technological process. In order to achieve the autonomy of the mobile agents, e.g., Automated Guided Vehicles (AGVs) or mobile robots, it is paramount to provide a source of reliable navigational data, such as the information about the position of the agent or the layout of the environment it is working in. The former is handled by employing various types of positioning systems.
Accurate, precise, and reliable navigational data are especially important in applications where a given AGV has to cooperate with another vehicle or object, e.g., warehouse inventory inspection [
1], cargo carriage in storehouse [
2], or autonomous picking and palletizing [
3]. Another example of an implementation of the reliable positioning system that is worth mentioning is customer navigation in a retail shop [
4]. Demesure et al. [
5] presents a navigation approach of mobile agents in the AGV-based manufacturing system. Sprunk et al. [
6] propose a complex navigational system for the omnidirectional robot to implement enhanced logistic technology in industrial environment applications.
Different absolute positioning systems exist that use miscellaneous operating principles, such as Time-Of-Flight (TOF), Time Difference Of Arrival (TDOA), Phase Of Arrival (POA), or Received Signal Strength Indicator (RSSI) of a signal [
7,
8]; however, these can be generally divided according to the basic calculation principle into those using lateration and angulation-based techniques. The former utilizes the distance measurements between a set of reference points (often referred to as anchors or beacons) and the tracked object, while the latter relies on the angles measured between the object and the beacons. Nevertheless, measurements made in the real world are subject to noise coming from various sources. This noise, being propagated through the position estimation algorithm results in inaccurate estimates, thus limiting the usefulness of the system; therefore, it is essential to establish a procedure to mitigate the effect of the measurement noise on the output of the positioning system.
In our research, we utilize an Ultra Wide Band (UWB) technology-based positioning system due to its high applicability and current popularity for indoor applications. Moreover, the UWB rangefinder modules can be characterized by high accuracy (∼10 cm), ability to propagate signal through thin, non-metallic obstacles, and satisfactory range in an indoor environment [
9,
10]; however, this technology, similarly to other TOF-based ranging technologies, is highly sensitive to Non-Line-Of-Sight (NLOS) measurements. Radio signal traveling through any medium that is not a vacuum has an extended propagation time due to lower speed, which results in an overestimated distance measurement. Moreover, there can be different anchor-specific bias errors, caused by antenna misalignment, clock bias, wear of electronic parts, etc. [
11]. Having that in mind, in the last two decades extensive research has been carried out in the field of lateral positioning systems, primarily focused on the development of algorithms used for the minimization of the estimated positioning error.
Sinriech et al. [
12] analyzed configuration sensitivity of landmark navigation methods to improve the accuracy of AGV-based material handling systems operating in an industrial environment. Experimental results, including simulations of the static and dynamic performance of the vehicle, indicate that the triangulation positioning system is sensitive to noisy data as well as to different landmark and vehicle configurations.
Loevsky and Shimshoni [
13] proposed another efficient landmark-based system for indoor localization of mobile robots and AGVs: based on the efficient triangulation method and sensors for bearing measurements of different landmarks, the proposed localization system enables a mobile robot to be accurately localized in motion and eliminate misidentified landmarks.
Aksu et al. [
14] proposed a neural-network-based method to estimate the location of Bluetooth-enabled devices. The multi-layer perceptron network model with a back-propagation learning algorithm was applied to predict 2D coordinate location according to Received Signal Strength Information (RSSI) collected by three Bluetooth USB Adapters (BUAs). Although the authors made conclusions related to the effect of training sets inside and outside of the triangle formed by the three BUAs, they did not analyze the effects of different neural network architectures and learning algorithms on the estimation accuracy as well as how the number of training samples affects the set-up time.
Pelka et al. [
15] developed an iterative algorithm, which was applied to determine the anchor position according to available distance measurements between anchors. Although the position problem is solved with the mean error of 0.62 m and without requirements for GPS data or prior knowledge, simulation results indicate that the precision of the distance measurements significantly affects the outcome of the algorithm.
We can consider an example of the beacon-based systems for angle measurement in mobile robotic applications [
16]. This low power and flexible solution for robot positioning is named BeAMS, requires only one communication channel, is used for angle measurement and beacon identification. The authors proposed the mechanical design of the sensor as well as the theoretical analysis of the errors of the measured angles. The proposed model was compared with simulated and real measurements, and the achieved final error is lower than 0.24
.
Meissner et al. [
17] proposed an indoor positioning algorithm based on the UWB signal and the
a priori given floor plan information. The robust and accurate indoor localization was achieved with a receiver that uses single and double reflections of the transmitted signal in the room walls. According to
a priori known room geometry, the measured reflections of the transmitted signal are mapped to virtual anchors with known positions and further used to estimate the unknown position of the receiver. Although the authors proposed the scheme for mapping measurements to the virtual anchors, they did not investigate the influence of the number of calibration reference points to achieve a short set-up procedure time.
Soltani et al. [
18] conducted research to improve the Cluster-based Movable Tag Localization (CMTL) [
19]. They proposed a localization method based on a Radio Frequency Identification (RFID) system for localization of the resources and used neural networks to overcome the limitations of empirical weighted averaging formulas. The proposed method forms a grid of virtual reference tags within the selected cluster of real reference tags and uses neural networks to obtain the position of the target tag. However, the authors have not considered the NN architectures with more than one hidden layer, as well as the impact of different learning algorithms and activation functions on the localization accuracy of the target tag.
Another example of the optimization of the positioning system is the use of additional calibration modules with a different number of calibration units to improve the average-position error in the 3D real-time localization system [
20]. Three localization methods were used in the proposed research. The optimal configuration of calibration units was obtained in a simulation and tested in two real-world experiments. The small number of calibration units provides the best improvement-to-cost ratio; however, the most significant improvement of the average-position error is in the Z (vertical) direction; therefore, the proposed system is not recommended for 2D lateral positioning systems.
In our previous work, we proposed a method for improving the accuracy of the static infrared (IR) triangulation positioning system and eliminating errors caused by signal disturbances (e.g., reflections and multipathing) and/or inaccurate determination of the position of the beacons [
21]. The presented methodology uses beacon–receiver angles that are measured by the receiver being placed at the known reference points and thereafter estimates the apparent beacon positions. The main advantage of the proposed methodology is that the
a priori information about the locations of the beacons is not required. In further research, we developed a calibration method for a lateration positioning system based on measuring beacon–receiver distances. According to measurements based on lateration and known reference positions of the receivers, the proposed method estimates unknown positions of the beacons (i.e., apparent positions) and compensates for the static errors [
22].
Compared to the previously reported state-of-the-art methods, the major contributions of the paper can be summarized as follows:
A new hybrid procedure based on ABPE and NNs is used to correct the positioning system measurements;
Different neural network architectures are employed in order to find the optimally tuned parameters for the proposed calibration problem, e.g., 16 neural network architectures with 10 learning algorithms and 12 different activation functions for hidden layers are trained and validated in MATLAB environment to learn and predict measured positions;
The performance of the novel hybrid NN-ABPE-based method in terms of both the set-up time and accuracy is compared to the state-of-the-art calibration methods, i.e., mapping with a distortion model, Bias and Scale Factor Estimation (BSFE), and Apparent Beacon Position Estimation (ABPE). Experimental results obtained in two different scenarios (environment with and without obstacles) confirmed the effectiveness of the proposed methodology to predict positioning system measurement errors in real-world situations.
3. Experimental Results
3.1. Experiment 1
The selection of the appropriate learning algorithm, the activation function of neurons, and neural network architecture (the number of layers and the number of neurons in each layer) are significant problems in neural network design. In order to test the performance of the proposed method, experiment 1 was performed for preliminary tuning of the parameters of the neural network. For this experiment, 158 data samples were collected using the UR5 robot-based high-precision reference system described in [
34]. The neural networks are trained with the use of 10 different learning algorithms presented in
Table 1.
Furthermore, 16 neural network architectures (one-layered, two-layered, three-layered, and four-layered architectures), with different numbers of neurons in each layer, are used in order to find the optimal neural network structure for the current calibration problem. Taking the one-layered architectures as an example, the number of neurons is adopted from minimal 3 to maximal 15. Four two-layered architectures are tested with the number of neurons in the first layer varied from 3 to 5 and in the second layer from 3 to 15. The number of neurons in four three-layered architectures varies from 3 to 5 in the first layer, from 3 to 10 in the second layer, and from 3 to 15 in the third layer. Finally, four different four-layered architectures are also tested; for example, the network architecture represented as 5-5-10-15 means that there are 5 neurons in both the first and second hidden layers, 10 neurons in the third, and 15 neurons in the fourth hidden layer. The list of 16 aforementioned architectures is shown in
Table 2.
Another goal of this experiment was to test the effect of employing different activation functions of the neurons to the learning performance of the network.
Table 3 shows 12 activation functions (‘logsig’, ‘tansig’, ‘softmax’, ‘radbas’, ‘compet’, ‘tribas’, ‘hardlim’, ‘hardlims’, ‘poslin’, ‘purelin’, ‘satlin’, ‘satlins’) used for tuning the neural networks.
Altogether, 10 learning algorithms are used, with 16 neural network architectures and 12 different activation functions for hidden layers. Therefore, to assess the performance of the proposed approach, the total number of tested neural networks is .
After the preliminary experimental tuning, the learning rate for all neural network architectures is set to 0.01. The training process is stopped when the root mean square error RMSE falls below cm or in the case when the maximum number of iterations (2000) is reached. The experimental runs were repeated 50 times in order to collect data for statistical analysis. The algorithms were developed and experimentally validated in MATLAB environment running on the AMD Ryzen 7 3.8 GHz processor desktop computer with 8 GB of RAM. The input/output pairs (i.e., reference position/measured position) are divided in the following manner: 70% of data were used for training, and 30% of data were used for validation and testing. The accuracy of the network is measured with RMSE, where a lower value of the error indicates better calibration performance.
Table 3 shows comparative best result for 12 activation functions. These results are based on the series of trials where we have varied the network architecture, learning algorithm, and activation function. Detailed results of these calculations for the case of the ‘purelin’ activation function (lowest average RMSE of 0.99 cm) is shown in
Table 4. As can be seen, ‘logsig’, ‘tansig’, ‘softmax’, ‘radbas’, ‘purelin’, and ‘satlin’ activation functions achieve the lowest values of minimum RMSE, and therefore they were chosen to be used in the further experiments (2 and 3). Moreover, for four out of six of the best activation functions, the best RMSE value was achieved with the Levenberg–Marquardt back-propagation algorithm.
Figure 3 shows box plots of RMSE after 50 independent trials and reveal that the minimum RMSE is achieved with the ‘purelin’ activation function.
3.2. Experiment 2
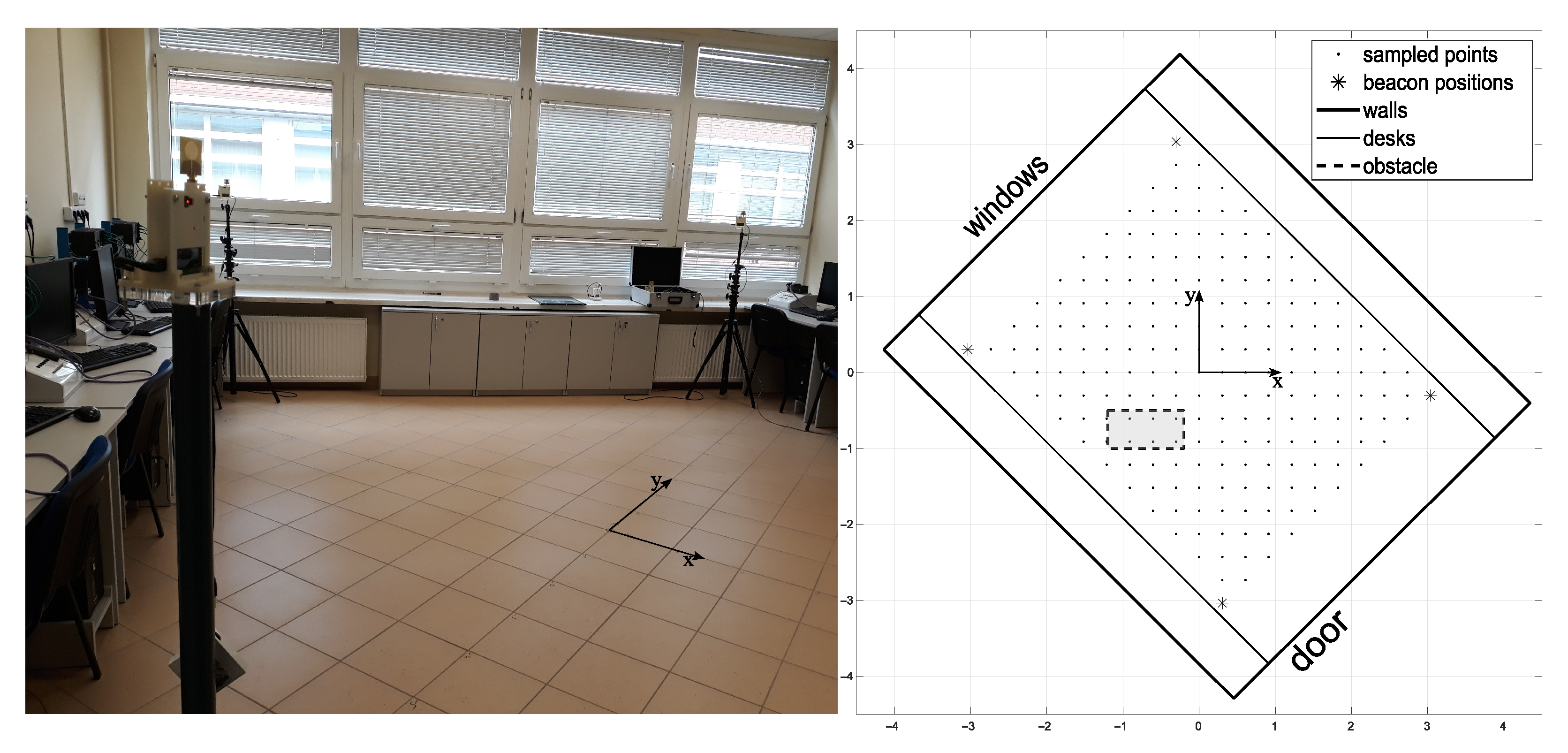
In the second experiment, the aim was to test the performance of the hybrid NN-ABPE method over real-world datasets. Therefore, experimental data were collected in real-world conditions, i.e., the following set-up measuring system was placed in a 6.5 × 5.5 m empty room. Four anchors were located in positions indicated in
Figure 4; measurement positions were taken on every vertex of the square grid with the spacing of 0.30 m.
The collected data were preprocessed by using the ABPE method and were used to train the neural networks. The goal of this experiment was to find the best neural network using the best activation functions obtained in experiment 1 (‘logsig’, ‘tansig’, ‘softmax’, ‘radbas’, ‘purelin’, ‘satlin’) and the best learning algorithm from experiment 1 (Levenberg–Marquardt back-propagation). The other parameters were set as follows: learning rate was adopted as 0.01, the stopping criteria for training were reaching the RMSE of cm or reaching the maximum number of learning iterations (2000); all calculations were repeated 50 times.
In order to test the usefulness of our proposed method, it is necessary to test how robust the accuracy improvement is, depending on the number and the pattern of the training samples. Typically, uniform sampling patterns of varying sampling densities are used in real conditions. In this experiment, we defined eight sampling patterns, in which the sampling points were selected from the previously collected dataset such as to form uniform grid distributions with varying sampling densities. These sampling patterns, arranged from the highest density (number of samples) to the lowest, are presented in
Figure 5. We have compared the accuracy improvement results of the state-of-the-art methods (DQM, ABPE, BSFE) and the different configurations of our proposed hybrid NN-ABPE method for these sampling patterns. The results are shown in
Table 5. The improved rate IR is computed as follows (
21):
As can be seen, the results achieved with the proposed hybrid method indicate a noticeable improvement in calibration accuracy. For seven out of eight tested sampling point distribution patterns, the NN-ABPE method with a ‘purelin’ activation function showed the best result with minimal RMSE. Moreover, the hybrid NN-ABPE method achieves better results when compared with the model based only on NNs (NN-RAW purelin). The overall success calculated by improved rate (IR) ranges from 5.22% (for pattern #2.1) to 41.83% (for pattern #2.6).
Figure 6 shows box plots of RMSE results after 50 repetitions with the hybrid NN-ABPE approach and a ‘purelin’ activation function. It can be concluded that even if there is a relatively small number of training samples (e.g., six training samples for pattern #2.6 and pattern #2.7, or five training samples for pattern #2.8), the proposed method achieves a high level of accuracy in scenarios where fast set-up time is an essential requirement.
3.3. Experiment 3
The third experiment was performed to test the hybrid NN-ABPE method in a real-world set-up including obstacle. The data set was collected in the same laboratory environment with a single obstacle in the form of a metal cabinet (1 × 0.4 m) placed in the middle of the room. The experimental set-up consists of four anchors, which were located as shown in
Figure 4, while the measurement positions were taken on every vertex of the square grid with the spacing of 0.3 m. The obstacle is located in the environment as shown in
Figure 4. The addition of the obstacle necessitates a change in the sampling pattern as shown in
Figure 7.
The goal of this experiment was to find the best NN architecture while using the best activation function and learning algorithm selected in experiment 1. The other parameters of the neural networks are set as follows: learning rate is adopted as 0.01; the stopping criteria for training is achieving the RMSE of cm or reaching the maximum number of learning iterations (2000). All calculations are repeated 50 times.
Table 6 shows the comparative results of the proposed hybrid NN-ABPE method and the other state-of-the-art calibration methods (DQM, ABPE, BSFE). The experimental results obtained with the proposed hybrid method indicate a noticeable improvement in calibration accuracy. For all eight patterns testing the different uniform distributions (i.e., densities of the positions taken for the training of the neural networks), the NN-ABPE method with a ‘purelin’ activation function showed the best result with minimal RMSE. The IR for all patterns is over 56%; the best-improved rate of 91% is reported for pattern #3.1, while the second-best improvement of 67% is recorded for pattern #3.8.
Box plots of RMSE results after 50 repetitions achieved with hybrid NN-ABPE approach and ‘purelin’ activation function are presented in
Figure 8. It can be concluded that even when the obstacles are placed in an indoor environment, the proposed method can obtain a high level of accuracy (RMSE of 1.90 cm) when all data samples are measured. Moreover, in scenarios where the fast set-up time is an essential requirement, experimental results demonstrate that a relatively small number of training samples (i.e., 5–7 measured points) is sufficient to achieve a high level of accuracy; e.g., 10 training samples for pattern #3.5 leads to RMSE of 7.70 cm, while 5 training samples for pattern #3.8 provide RMSE of 8.05 cm.
4. Conclusions
In this paper, the authors propose and experimentally evaluate a novel quick set-up calibration method used for accurate compensation of positioning system measurement errors. The proposed hybrid approach is based on back-propagation neural networks trained on data estimated by the Apparent Beacon Position Estimation method (ABPE). The ABPE method determines the so-called apparent beacon positions, which are then used to estimate the receiver position by the NLS method.
Furthermore, the proposed learning mechanism based on neural networks is employed to predict the relation between the reference position and the position obtained through the ABPE method. Different neural network structures, learning algorithms, and activation functions are experimentally evaluated in order to find the optimal solution for the real-world implementation. For fine-tuning purposes, 16 neural network architectures with 10 learning algorithms and 12 different activation functions for hidden layers are investigated in MATLAB environment (1920 networks are tested in total). The results from experiment 1 show that a neural network trained by the Levenberg–Marquardt algorithm and ‘purelin’ activation function provides the overall best performance.
Moreover, in order to show the robustness of the proposed approach, the method is validated in two new experimental studies and compared with the state-of-the-art calibration methods, i.e., Distortion Quadratic Model (DQM), Bias and Scale Factor Estimation (BSFE), and Apparent Beacon Position Estimation (ABPE). The first real-world scenario foresees an indoor environment without obstacles, while the second one considers the measurement of reference positions in a laboratory environment with additional obstacles introduced.
Results from experiments 2 and 3 show that the proposed hybrid NN-ABPE method can predict the location of the target with a high level of accuracy (RMSE of 4.37 cm in experiment 2 with samples and RMSE of 1.90 cm in experiment 3 with samples). When it comes to the number of samples necessary to realize a fast set-up procedure, the achieved experimental results demonstrate the superiority of the proposed NN-ABPE method trained with Levenberg–Marquardt backpropagation algorithm and linear activation function ‘purelin’ over the state-of-the-art methods. For the lowest number of samples, it is necessary to have only five reference points, and the proposed method will predict the position of the target object with RMSE of 4.66 cm (experiment 2—without obstacles), which is a 33% improvement over raw results, and RMSE of 8.05 cm (experiment 3—with an added obstacle) with 68% improvement over the raw results.
It is worth noting that both DQM and BSFE methods seem to give slightly better results and thus are more suited to be the first stage of the hybrid method. However, it is important to observe that these methods do require a priori knowledge of the beacon positions. Since the ABPE method does not depend on that information, it is a much better candidate when a short set-up time is desired. Thus, we have constructed our hybrid method with the ABPE as the initial step.
Bearing in mind that the choice of the number and the pattern of the sampling points play an essential role in setting up the system, one of the future research directions might be oriented towards a new methodology for the optimal selection of the location of the reference points used in the calibration procedure.
It would also be prudent to establish the level of possible accuracy improvement using the proposed hybrid NN-ABPE method in the range of possible environments by performing multiple additional experiments in real-life industrial scenarios.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}