
Triple Estimation of Fractional Variable Order, Parameters, and State Variables Based on the Unscented Fractional Order Kalman Filter



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Discrete Variable Fractional Order State-Space System
3. Triple Estimation Algorithm Based on UFKF Filter
3.1. Dual Estimation Scheme
3.2. Triple Estimation Scheme—The Main Result
3.2.1. Order Estimation Filter KFo
3.2.2. State Estimation Filter KFx
3.2.3. Parameters Estimation Filter KFw
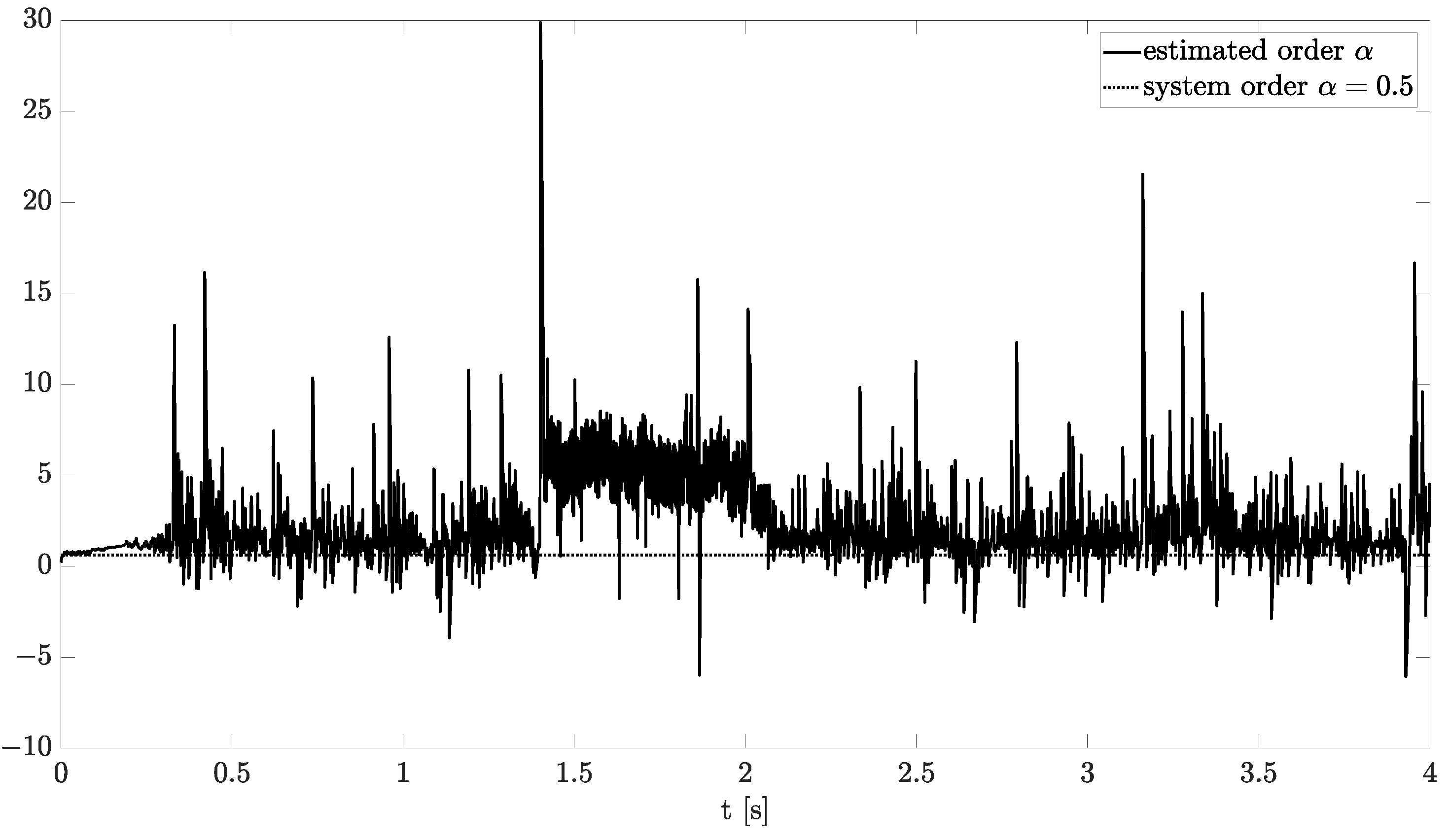
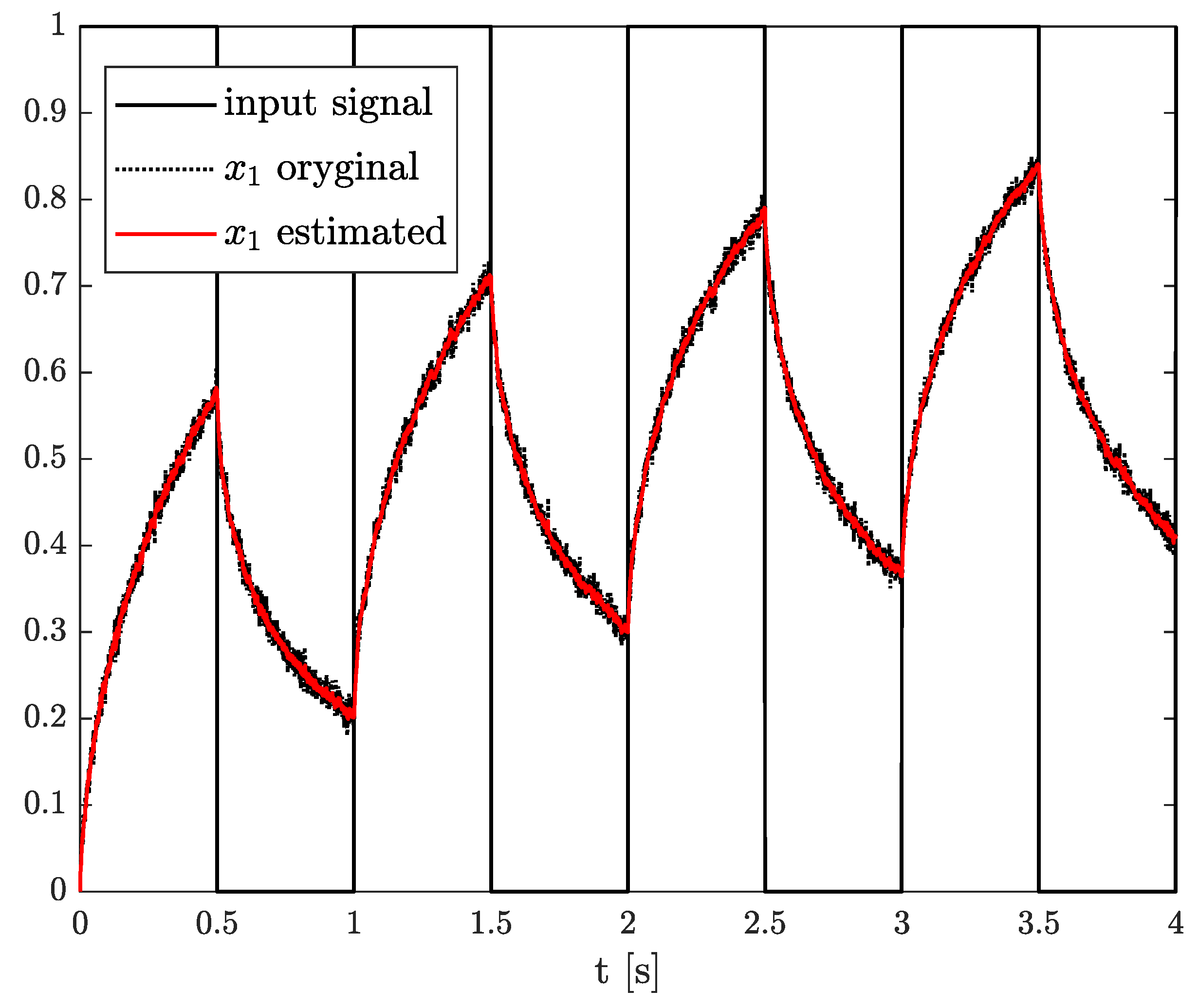
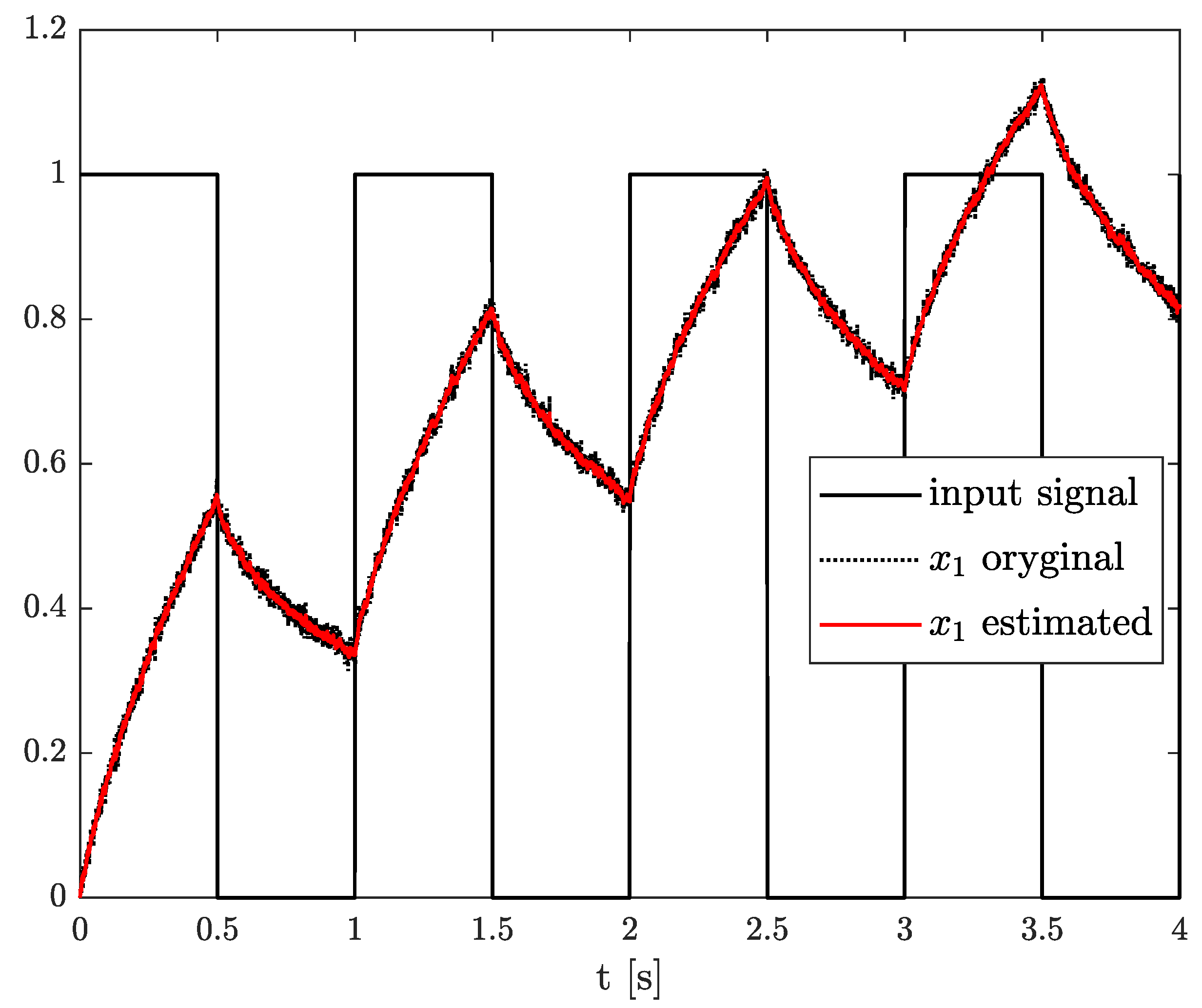
4. Numerical Results
- Noises parameters
- Parameters of the KFx filter
- Parameters of the KFo filter
- Parameters of the KFw filter
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miller, K.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differenctial Equations; John Wiley & Sons Inc.: New York, NY, USA, 1993. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-Order Systems and Controls; Springer: London, UK, 2010. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Magin, R.; Ortigueira, M.D.; Podlubny, I.; Trujillo, J. On the fractional signals and systems. Signal Process. 2011, 91, 350–371. [Google Scholar] [CrossRef]
- Dzielinski, A.; Sierociuk, D. Fractional Order Model of Beam Heating Process and Its Experimental Verification. In New Trends in Nanotechnology and Fractional Calculus Applications; Baleanu, D., Guvenc, Z.B., Machado, J.A.T., Eds.; Springer: Cham, The Netherlands, 2010; pp. 287–294. [Google Scholar]
- Sierociuk, D.; Dzielinski, A.; Sarwas, G.; Petras, I.; Podlubny, I.; Skovranek, T. Modelling heat transfer in heterogeneous media using fractional calculus. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20120146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sakrajda, P.; Wiraszka, M.S. Fractional variable-order model of heat transfer in time-varying fractal media. In Proceedings of the IEEE 2018 19th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 28–31 May 2018; pp. 548–552. [Google Scholar]
- Wiraszka, M.S.; Sakrajda, P. Switching Energy Loss in Fractional-Order Time-Varying Heat Diffusion Model. In Advances in Non-Integer Order Calculus and Its Applications. RRNR 2018. Lecture Notes in Electrical Engineering; Malinowska, A., Mozyrska, D., Sajewski, Ł., Eds.; Springer, Cham: Switzerland, 2018; Volume 559, pp. 294–305. [Google Scholar]
- Sakrajda, P.; Sławomir Wiraszka, M. Fractional-order diffusion model for social networks. In Proceedings of the International Conference on Fractional Differentiation and Its Applications (ICFDA), Amman, Jordan, 16–18 July 2018. [Google Scholar]
- Sheng, H.; Chen, Y.; Qiu, T. Signal Processing Fractional Processes and Fractional-Order Signal Processing; Springer: London, UK, 2012. [Google Scholar]
- Sierociuk, D.; Macias, M.; Malesza, W.; Sarwas, G. Dual Estimation of Fractional Variable Order Based on the Unscented Fractional Order Kalman Filter for Direct and Networked Measurements. Circuits Syst. Signal Process. 2016, 35, 2055–2082. [Google Scholar] [CrossRef] [Green Version]
- Ziubinski, P.; Sierociuk, D. Improved Fractional Kalman Filter for Variable Order Systems with lossy and delayed network. In Proceedings of the 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR), Midzyzdroje, Poland, 2–5 September 2014; pp. 159–164. [Google Scholar]
- Sierociuk, D.; Tejado, I.; Vinagre, B.M. Improved fractional Kalman Filter and its application to estimation over lossy networks. Signal Process. 2011, 91, 542–552. [Google Scholar] [CrossRef]
- Sierociuk, D.; Ziubinski, P. Fractional order estimation schemes for fractional and integer order systems with constant and variable fractional order colored noise. Circuits, Syst. Signal Process. 2014, 33, 3861–3882. [Google Scholar] [CrossRef] [Green Version]
- Ziubinski, P.; Sierociuk, D. Fractional order noise identification with application to temperature sensor data. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 2333–2336. [Google Scholar] [CrossRef]
- Romanovas, M.; Klingbeil, L.; Traechtler, M.; Manoli, Y. Application of fractional sensor fusion algorithms for inertial MEMS sensing. Math. Model. Anal. 2009, 14, 199–209. [Google Scholar] [CrossRef]
- Muresan, C.I.; Birs, I.R.; Dulf, E.H.; Copot, D.; Miclea, L. A Review of Recent Advances in Fractional-Order Sensing and Filtering Techniques. Sensors 2021, 21, 5920. [Google Scholar] [CrossRef] [PubMed]
- Zhou, S.; Cao, J.; Chen, Y. Genetic Algorithm-Based Identification of Fractional-Order Systems. Entropy 2013, 15, 1624–1642. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Valério, D.; Machado, J.T. Variable order fractional systems. Commun. Nonlinear Sci. Numer. Simul. 2019, 71, 231–243. [Google Scholar] [CrossRef]
- Valerio, D.; da Costa, J.S. Variable-order fractional derivatives and their numerical approximations. Signal Process. 2011, 91, 470–483. [Google Scholar] [CrossRef]
- Lorenzo, C.; Hartley, T. Variable order and distributed order fractional operators. Nonlinear Dyn. 2002, 29, 57–98. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W.; Macias, M. Derivation, interpretation, and analog modelling of fractional variable order derivative definition. Appl. Math. Model. 2015, 39, 3876–3888. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W.; Macias, M. On the Recursive Fractional Variable-Order Derivative: Equivalent Switching Strategy, Duality, and Analog Modeling. Circuits Syst. Signal Process. 2015, 34, 1077–1113. [Google Scholar] [CrossRef] [Green Version]
- Macias, M.; Sierociuk, D. An alternative recursive fractional variable-order derivative definition and its analog validation. In Proceedings of the International Conference on Fractional Differentiation and its Applications, Catania, Italy, 23–25 June 2014. [Google Scholar]
- Sierociuk, D.; Malesza, W.; Macias, M. Equivalent switching strategy and analog validation of the fractional variable order derivative definition. In Proceedings of the European Control Conference 2013 (ECC’2013), Zurich, Switzerland, 17–19 July 2013; pp. 3464–3469. [Google Scholar]
- Sierociuk, D.; Malesza, W.; Macias, M. Switching scheme, equivalence, and analog validation of the alternative fractional variable-order derivative definition. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013. [Google Scholar]
- Sierociuk, D.; Malesza, W.; Macias, M. On a new definition of fractional variable-order derivative. In Proceedings of the 14th International Carpathian Control Conference (ICCC), Rytro, Poland, 26–29 May 2013; pp. 340–345. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W. Fractional variable order discrete-time systems, their solutions and properties Int. J. Syst. Sci. 2017, 48, 3098–3105. [Google Scholar] [CrossRef]
- Wan, E.; Nelson, A. Dual Kalman filtering methods for nonlinear prediction, smoothing, and estimation. In Advances in Neural Information Processing Systems 9: Proceedings of the 1996 Conference; Mozer, M.C., Jordan, M.I., Petsche, T., Eds.; MIT Press: Cambridge, MA, USA, 1997; Volume 9, pp. 793–799. [Google Scholar]
- Wan, E.; van der Merwe, R.; Nelson, A. Dual estimation and the unscented transformation. In Advances in Neural Information Processing Systems 12; Solla, S.A., Leen, T.K., Muller, K.R., Eds.; MIT Press: Cambridge, MA, USA, 1999; Volume 12, pp. 666–672. [Google Scholar]
- Haykin, S. Kalman Filtering and Neural Networks; John Wiley & Sons Inc.: New York, NY. USA, 2001. [Google Scholar]
- Sierociuk, D.; Malesza, W.; Macias, M. Practical analog realization of multiple order switching for recursive fractional variable order derivative. In Proceedings of the 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 24–27 August 2015. [Google Scholar] [CrossRef]
- Sierociuk, D.; Malesza, W.; Macias, M. Numerical schemes for initialized constant and variable fractional-order derivatives: Matrix approach and its analog verification. J. Vib. Control. 2015. [Google Scholar] [CrossRef]
- Sierociuk, D. Fractional Variable Order Derivative Simulink Toolkit. Available online: https://www.mathworks.com/matlabcentral/fileexchange/38801-fractional-variable-order-derivative-simulink-toolkit (accessed on 10 October 2021).













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sierociuk, D.; Macias, M. Triple Estimation of Fractional Variable Order, Parameters, and State Variables Based on the Unscented Fractional Order Kalman Filter. Sensors 2021, 21, 8159. https://doi.org/10.3390/s21238159
Sierociuk D, Macias M. Triple Estimation of Fractional Variable Order, Parameters, and State Variables Based on the Unscented Fractional Order Kalman Filter. Sensors. 2021; 21(23):8159. https://doi.org/10.3390/s21238159
Chicago/Turabian StyleSierociuk, Dominik, and Michal Macias. 2021. "Triple Estimation of Fractional Variable Order, Parameters, and State Variables Based on the Unscented Fractional Order Kalman Filter" Sensors 21, no. 23: 8159. https://doi.org/10.3390/s21238159