1. Introduction
Urban transportation is considered the lifeblood of the world’s economy, with a rapid increase of all sorts of vehicles and a stably increasing population in need of mobility, posing challenges to cities, with one of the major problems being the increase of traffic and the associated issues. According to the World Health Organization (
https://www.who.int/publications/i/item/9789241565684, Last accessed on 16 November 2021), each year, 1.35 million people are killed and 20 million are wounded on roadways around the world. Road crash injuries are estimated to be the eighth leading cause of death globally, with an estimated cost among the fatal and wounded victims of approximately USD
trillion from 2015–2030, equivalent to a yearly tax of
% on global GDP (Chen et al. [
1]). Furthermore, according to INRIX (
https://inrix.com/press-releases/2019-traffic-scorecard-us/, Last accessed on 16 November 2021), traffic congestion cost the U.S. economy nearly USD 88 billion in 2019 alone.
Intelligent Traffic Management and Control (ITMC) systems have emerged as a vital element of traffic management solutions, with the research community developing mechanisms to increase their accuracy, efficiency, and effectiveness. Traffic state forecast and intersection signal control are two main components that ITMC incorporates. Commonly, two genres of methods can be found, with the first component based on statistical methods and data-driven approaches, enabling the formulation hypotheses and the derivation of assumptions in a macroscopic and microscopic perspective for traffic flow. However, these approaches cannot handle unstable traffic conditions and complex road settings (Elhenawy and Rakha [
2]). To overcome the nonlinearity of traffic, data-driven approaches, such a Support Vector Machines (SVMs), K-Nearest Neighbors (KNNs), Bayesian methods, and Neural Networks (NNs), enable one to overcome the limitations of statistical methods with promising results (Huang et al. [
3]). However, for a model to achieve a good performance, a large amount of time series data is required, with the efficiency largely depending on how much a model can capture the spatial–temporal features of the traffic states. Moreover, corrupted or missing data pose difficulties for models, limiting the capacity to provide a useful and reliable forecasting result. Recently, deep-learning-based methods have addressed some of these limitations due to their ability to process large amounts of data efficiently and to capture hidden or unknown traffic dynamics (Bao et al. [
4]).
On the other hand, efficient intersection traffic signal control, particularly in oversaturated conditions, requires actions to be taken based on the current traffic dynamic variables of the corresponding and neighboring intersections by the proper implementation of the policies. The most widely used method to tackle this problem is the FT controllers, which use historical data to determine the appropriate timing of traffic signals. However, this approach cannot meet the current traffic stochastic demands and handle unexpected traffic situations (Osorio and Wang [
5]). Due to the limitations of the Fixed Time (FT) controllers, Webster’s method was introduced, where inductive detectors are employed to observe the actual traffic conditions and efficiently extend or terminate the green signal time by measuring the gap between vehicles. However, accumulative information is neglected, reducing the overall performance (Eriskin et al. [
6]).
The Sydney Coordinated Adaptive Traffic System (SCAT) (Sims and Dobinson [
7]) and Split, Cycle, and Offset Optimization Technique (SCOOT) (Hunt et al. [
8]) adopt adaptive systems to suppress the drawbacks of the previous methods by gathering the data of the traffic flow in real-time at each intersection to control the timing of traffic lights effectively. The SCAT systems count vehicles at each stop line to gather traffic information, and the SCOOT applies a set of advanced detectors located upstream of the stop line. Using these detectors, the SCOOT provides a higher resolution of the current traffic conditions, such as traffic flow and the number of cars in the queue before they reach the stop line. The SCAT and SCOOT both use centralized control schemes, with systems being run locally, and the coordination between intersections is achieved by communication among the neighbors. For example, when an intersection releases several vehicles, it informs the next intersection about the time and number of vehicles to expect at a particular time. However, the performance of such methods heavily depends on the detector’s position and reliability. Recently, deep-learning models have been applied to self-adaptive traffic signal control, exhibiting substantially better performance in terms of accuracy and robustness (Bouktif et al. [
9]).
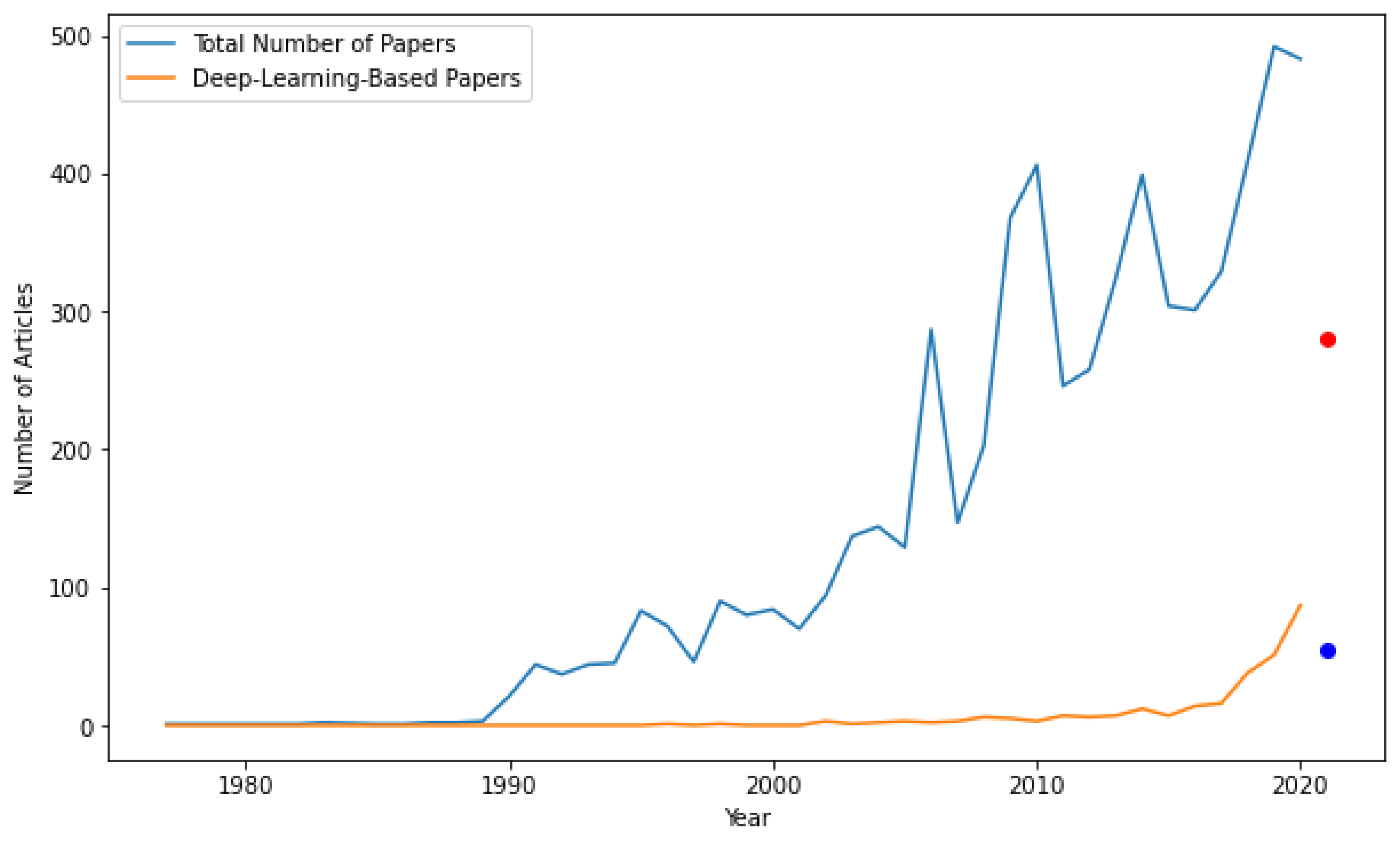
The success of image-processing and the associated deep-learning technologies in ITMC in comparison with statistical methods can be realized from
Figure 1, not only in terms of the quantity of articles published, but also in the quality of the forums in which they are published. In 2020, in the Scopus database, out of 483 published articles, 87 were based on deep-learning or image-processing methods, and they showed much better performances compared to state-of-the-art methods.
This review focuses on image-processing and deep-learning-based approaches to ITMC. Although there is a considerable number of relevant articles on intelligent transportation/traffic management and control (Nagy et al. [
10], Pasquale et al. [
11], Mirchandani et al. [
12]), to the best of the authors’ knowledge, there are a limited number of works on ITMC based on image-processing and deep-learning-based. Within the literature, the new emerging image-processing and deep-learning techniques are at an early stage of development, but with an increasing number of relevant implementations among the research community. In the year 2011, there were in total 246 documents published on the Scopus database, whereas in 2020, that amounted to almost double, reaching 483, as summarized in
Figure 1. Therefore, this study is valuable both for machine-learning and ITMC researchers and decision-makers, who could identify the potential advantages of ITMC in their practice.
The structure of this article as follows:
Section 2 presents the methodologies used to identify and select the documents to be analyzed.
Section 3 indicates different traffic state prediction/forecasting approaches and models with their corresponding structure, limitations, and performances.
Section 4 is devoted to intersection-traffic-signal-control methods/policies, with a primary focus on their limitations and performances. Both in
Section 3 and
Section 4, particular emphasis is given to image-processing and deep-learning-based approaches, including a brief overview of commonly employed methods. In
Section 5, the developed search of this review is described and complemented with significant research challenges found in the literature. Finally,
Section 6 provides insights regarding the objectives drawn and points out the main conclusions.
2. Methodology of the Systematic Review
This section describes the research methodology used to locate, gather, and appraise the state-of-the-art works under study. The main requirement was to sort out the important recent works on intelligent traffic-management-and-control methods/systems based on image-processing and deep-learning approaches. The following complementary questions were considered:
Which task of ITMC was addressed?
Which dataset was used? Was it tested on different datasets?
Which architecture/optimizer was utilized (developed or adapted)?
What metrics were used for evaluation?
Is the approach adopted or developed able to achieve real-time performance?
For intersection-signaling schemes, what type of simulation environments (microscopic or macroscopic) were utilized? How were the policies evaluated?
2.1. Selection Criteria
The selection of the articles followed these criteria: (i) The studies should focus on intelligent traffic-management-and-control methods/systems based on the following approaches: image-processing and deep-learning techniques. The studies must identify problems, potential solutions, novelties, and limitations from which recommendations can be established. (ii) The studies should be peer-reviewed studies (research articles and literature reviews), best practices manuals (existing guidelines for ITMC), or policies. (iii) The research studies should include quantitative or qualitative research methods. (iv) All studies should be in English.
2.2. Databases and Search Steps
This literature review was conducted from March to July 2021 using Scopus, Science Direct, and Google Scholar. The authors extended the search to Google Scholar to include policies and best practices manuals. The search was performed with the following keywords in various combinations: “intelligent transportation”, “intelligent traffic management and control”, “image processing and deep learning-based intelligent traffic management and control”, “short-term traffic forecasting”, “image processing and deep learning-based short-term traffic forecasting”, “intersection traffic signal control”, “image processing and deep learning-based intersection traffic signal control”.
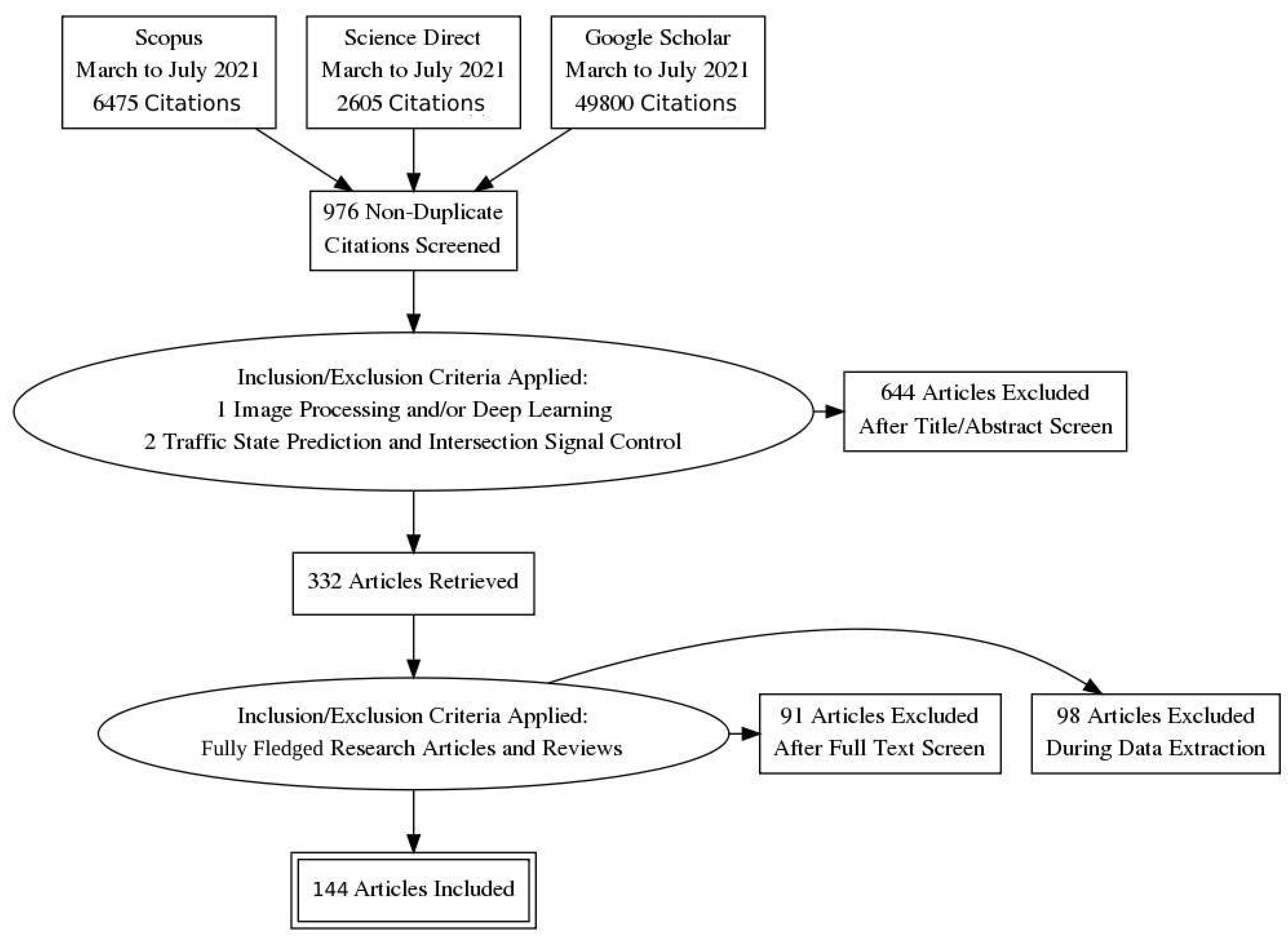
In the first step, we selected studies addressing the keywords: “intelligent transportation”, “intelligent traffic management and control”, “short-term traffic forecasting”, and “intersection traffic signal control” in various combinations. As a refinement step, we excluded duplicated articles and focused on image-processing and deep-learning approaches. The remaining articles were analyzed based on their titles and abstracts, with 332 articles retrieved. The 144 fully fledged research articles and reviews were sorted out to carry out in-depth studies through a complete reading of each document. We assessed the articles through the criteria that they should contain one of the following aspects: (1) research with actual users through qualitative or quantitative methods and the main method proposed and results obtained should be fully described; (2) specific guidelines or recommendations relating to the architecture, optimization, and metrics; (3) a review of existing literature regarding ITMC, as well as available policies that could contribute to the signaling schemes. In the final step, data from each document were organized in terms of type of study, primary focus, datasets used, adopted performance metrics, and limitations.
Figure 2 illustrates these processes according to a PRISMA diagram.
3. Traffic State Prediction
Traffic state prediction aims to forecast future traffic variables such as flow or speed in the road network based on historical or observed traffic data and other supporting information relevant to the demand. Most of the models used for forecasts found in the literature deal with parametric or nonparametric approaches. The most popular parametric approaches are the Autoregressive Integrated Moving Average (ARIMA) models. Among the nonparametric techniques, various models have been proposed, such as NNs, SVMs for regression, and KNNs.
Figure 3 represents the basic building blocks of an NN-based traffic state prediction model.
3.1. Autoregressive Integrated Moving Average
One of the most used and classical models for time series forecast is ARIMA (Box et al. [
14]), which is based on the principle that future time series values can be generated from a linear function of past observations and white noise terms. The main advantage of ARIMA is its flexibility in following data patterns and higher forecast accuracy in the short term (Irhami and Farizal [
15]). However, it requires noise-free datasets for model construction and has limitations in capturing nonlinear features.
3.2. Support Vector Machines
Contrary to ARIMA, SVMs can handle nonlinear and high-dimensional problems. An SVM-based classifier tries to maximize the hyperplane separation between two classes by solving a linearly constrained quadratic programming problem. It is robust to overfitting while providing high generalization performance (Li and Xu [
16] Mingheng et al. [
17]). However, the SVM models perform better in forecasting medium-duration incident cases than high-duration incident cases (Yu et al. [
18]).
3.3. K-Nearest Neighbors
KNN is a data-driven model, being extremely sensitive to the data quality. Nevertheless, KNN is able to forecast traffic state by exploring the correlation among the data as instance-based learning, avoiding searching in all historical data. For the short-term traffic state prediction under special events, KNN has the potentiality to find the most similar historical patterns and ignore other dissimilar ones of the datasets. However, in common with most other traditional machine-learning approaches, KNN faces the curse of dimensionality problem in network-wide traffic prediction (Yu et al. [
19]).
3.4. Neural Networks
Within the literature, NN models used for traffic state forecast explore the use of Multilayer Feedforward Neural Networks (MLFNNs), Radial Basis Function Neural Networks (RBFNNs), Recurrent Neural Networks (RNNs), Convolutional Neural Networks (CNNs), Deep Belief Networks (DBNs), Wavelet Neural Networks (WNN)s, and Fuzzy Neural Networks (FNNs).
3.4.1. Multilayer Feedforward Neural Networks
The MLFNN is a simple feedforward NN consisting of a layer of input units, one or more hidden units, and one layer of output units. The most pioneering contribution of short-term traffic forecasting using MLFNNs can be found in the works of Smith and Demetsky [
20], Gilmore and Abe [
21], Florio and Mussone [
22], and Dougherty and Cobbett [
23].
Smith and Demetsky proposed a simple MLFNN for short-term volume prediction with one hidden layer, trained using real-world data (open data at VDOT
https://www.virginiaroads.org/datasets/traffic-volume/explore, Last accessed on 16 November 2021), which exhibited a lower performance compared with the nearest-neighbor model. Gilmore and Abe improved the accuracy by employing two hidden layers, taking into consideration training and simulation time to increase the accuracy of the works led by Florio and Mussone, with the use of three hidden layers and preprocessed training data to mitigate significant training time problems and increase the accuracy. Dougherty and Cobbett trained an MLFNN with one hidden layer to forecast short-term traffic flow, speed, and occupancy space. The results showed that speed forecast was much less successful, although flow and occupancy forecasts exhibited promising results. Capturing both spatial and temporal features of traffic states and the usage of a correction mechanism can mitigate the problems as identified by Polson and Sokolov [
24] and Huang et al. [
3].
Although the accuracy was not very promising, attempts were also made to model and forecast network-wide traffic using MLFNNs (Sun et al. [
25], Elhenawy and Rakha [
2]). Sun et al. combined Graphical Lasso (GL) with an NN for a multilink prediction model. Elhenawy and Rakha proposed a much more accurate and robust data-driven approach by considering current traffic state data, weather conditions, visibility levels, and seasonal predictors. Moreover, their work was a milestone for the identification of traffic problems up to 2 h in advance, when compared to Kumar et al. [
26], whose work was only able to extend the time horizon to a maximum of 15 min.
MLFNN-optimization strategies were also found during the studies; for example, Vlahogianni et al. [
27] proposed a genetic-algorithm-based, structural-optimization strategy to help in both the proper data representation with temporal and spatial features, as well as inappropriate structure selection.
Table 1 summarizes the works using MLFNNs and their focus, limitations, and performances.
Due to their capabilities of modeling nonlinear functions with a simple architecture, MLFNNs have been extensively used in traffic state prediction. However, these models have some limitations in the exploration of more complex data correlations.
3.4.2. Radial Basis Function Neural Networks
Radial Basis Function Neural Network (RBFNN) models use Radial Basis Functions (RBFs) as the activation functions, being composed of one input layer, one hidden layer, and one linear output layer. Park et al. [
28] used an RBFNN for short-term freeway traffic volume prediction, with results topping around
% and
%, with forecast traffic volumes being in the 10% and 20% error range, respectively. The prediction accuracy was improved by combining fuzzy C-means with an RBFNN and using a Generalized Regression Neural Network (GRNN) following the work of Park [
29], Kuang et al. [
30], and Buliali et al. [
31]. On top of the GRNN, Buliali et al. used a Leave-One-Out Cross-Validation (LOOCV) method to determine the suitable smoothing factor in order to to avoid overfitting, achieving an RMSE of
. Furthermore, Xiaobin [
32] explored the use of Particle Swarm Optimization (PSO) to appropriately select the training parameters of an RBFNN, leading to a significant increase in prediction accuracy with a MAPE of
%. Moreover, both the historical data of the current intersection and adjacent intersections were found to have a significant effect on the performance (Zhu et al. [
33]).
Table 2 indicates the works found and their primary focus, limitations, and performances.
The performance of an RBFNN depends on the selection of centers and widths. The simplicity of the K-means clustering algorithm, width calculation, and the least mean squares algorithm for weight training make the method faster and efficient (Amin et al. [
34]). However, the performance of the RBFNNs depends on the choice of the RBFs’ parameters.
3.5. Wavelet Neural Networks
A Wavelet Neural Network (WNN) is essentially an MLFNN model where an additional wavelet function is applied to the hidden layers instead of the traditional
or
activation functions. It takes advantage of the multiscale decomposition of the wavelet transform and the self-learning capability of NNs to represent complex patterns. Ge and Wang [
35] proposed a WNN-based short-time traffic flow prediction model that increased the accuracy and facilitated the convergence time, primarily due to the use of small training datasets. To further reduce the running time, Lin et al. [
36] employed the use of a KNN to preselect the optimal training datasets for the WNN. Li and Sheng [
37] and Yang and Hu [
38] placed particular emphasis on the improvement of the prediction accuracy. Li and Sheng proposed a modified adaptive particle swarm optimization algorithm based on cloud theory that exhibited better performance in comparison to other baselines. Yang and Hu combined an Improved Genetic Algorithm (IGA) with a clustering search strategy and a WNN (IGA-WNN), boosting the prediction accuracy and better handling nonlinear cases.
Table 3 indicates the works found using WNNs and their focus, limitations, and performances.
Similar to RBFNNs, WNNs require less training effort and the obtained models have a better representation ability than MLFNNs. A significant drawback of the WNN is the limited input dimensions. Constructing a WNN requires a large computational effort in the input decomposition, in particular with the higher dimensionality of the input vector.
3.6. Time-Delay Neural Networks
Time-Delay Neural Network (TDNN) models are generally defined as multilayer NNs where the time-shifting approach is used to capture the temporal dynamics of time series data by encoding on delayed inputs or states. Lingras and Mountford [
39] and Zhong et al. [
40] applied a Genetic Algorithm (GA) in the design of a TDNN for short-term traffic forecasting aimed to handle large coverage areas, obtaining 10% average errors. To improve the accuracy, Wang et al. [
41] integrated spatial and temporal autocorrelations of road traffic networks using a Space–time-Delay Neural Network (STDNN) using a low learning rate, achieving a MAPE of
. Khandani and Mikhael [
42] included a pretransformed layer with a TDNN using Discrete Cosine Transform (DCT), combined with a mixed transform strategy, to improve the model learning process and increase accuracy significantly.
Table 4 summarizes the works found using TDNNs and their primary focus, limitations, and performances.
TDNNs are a simple way to represent correlations between past and present values in a feedforward model, requiring lower computational effort when compared to other models. However, longer a training time and difficulties in capturing temporal dynamics are some of the significant drawbacks of TDNNs.
3.7. Recurrent Neural Networks
The Recurrent Neural Network (RNN) models are powerful and robust because of their internal memory and ability to remember the input they receive, which allows them to predict future events. Hence, they are helpful in modeling sequence data such as time series. In the literature, a good amount of works on traffic state prediction were found based on the standard RNN, Long Short-Term Memory (LSTM), and the Gated Recurrent Unit (GRU), which are briefly described in the following sections.
3.7.1. Standard RNNs
Unlike traditional NNs, RNNs are designed by feeding the output from previous steps into the input of the current state cell. They are particularly suitable for predicting future scenarios utilizing the sequential inner characteristics of the data. Ulbricht [
43] pioneered the use of RNNs for traffic forecasting, using a multi-recurrent NN, and compared the proposed model with conventional statistical methods. The proposed multi-recurrent NN exhibited improved performance. In order to improve the accuracy, in particular for datasets characterized by instability, dynamic fluctuations, and unpredictability, Yun et al. [
44], Dia [
45], and Ishak et al. [
46] proposed a time-delayed recurrent model, achieving a MAPE of around (4–6)%. Zhang [
47] employed autocorrelation and cross-correlation analysis to construct more adequate models, and with careful parameters, optimization improved the overall accuracy. Bohan and Yun [
48] applied LSTM, a GRU, and a Bidirectional RNN on the same datasets (GPS data), showing the feasibility of recurrent neural networks to achieve adequate traffic flow forecasting.
Table 5 summarizes the works found using RNNs, their focus, limitations, and performances.
One major drawback of the standard RNNs is the exploding and gradient vanishing problems, which cause difficulties in training the models.
3.7.2. Long Short-Term Memory NNs
The Long Short-Term Memory (LSTM) model was proposed to overcome the gradient vanishing problem in traditional RNNs, which prevents the Vanilla RNN from capturing long-term dependencies (Hochreiter et al. [
49]). The LSTM model employs a gating mechanism that allows deciding when and how to update its memory state. In the work of Ma et al. [
50], an LSTM was applied to automatically determine the optimal time lags and overcome the backpropagation error decay problem. However, they considered only the temporal dependencies to be captured, resulting in relatively high errors and less robustness. Khan et al. [
51] addressed incomplete data by utilizing a masking and imputation scheme, achieving a MAPE of
% for annual daily forecasting. Moreover, Jia et al. [
52] combined rainfall data in addition to speed data as the input and further improved the robustness and accuracy. Zhao et al. [
53] took into consideration the spatiotemporal correlation in traffic using a 2D network, effectively improving both robustness and accuracy. Lu et al. [
54] further improved the performance of LSTM by introducing cascading Temporal-aware Convolutional Context (TCC) blocks and a Loss-Switch Mechanism (LSM) to counteract non-Gaussian disturbances effectively.
Table 6 summarizes the works found using LSTMs and their limitations and performance.
3.7.3. Gated Recurrent Unit NNs
The Gated Recurrent Unit (GRU), a variation of the LSTM model, was introduced by Cho et al. [
55]. Although the performances of LSTM and the GRU are similar in many applications, GRU networks contain fewer parameters and are faster to train. Fu et al. [
56] were one of the first to apply a GRU on the PeMS [
57] datasets for traffic forecasting, showing slightly better performance and faster convergence than LSTM. To improve the accuracy, Zhao et al. [
58] proposed a data fusion method to fuse the information of two different datasets and applied a GRU for travel time prediction. Bartlett et al. [
59] considered the computational cost and network structure optimization and proposed three recurrent neural network models, with the GRU model outperforming the others, achieving an RMSE of
. To further enhance the accuracy and robustness, Pu et al. [
60] integrated a decay mechanism as extra gates of the GRU model to handle the missing value problem. Model transferability and reproducibility can be improved by considering both temporal and local features in traffic flow. An attention-based GRU model was proposed by Khodabandelou et al. [
61], achieving an MAE of
for a 1 h data sampling rate.
Table 7 indicates works found using GRUs and their focus, limitations, and performances.
3.8. Convolutional Neural Networks
A Convolutional Neural Network (CNN) contains layers such as convolution, max pooling, and fully connected layers apart from the input and output layers. The convolution layers in CNNs are connected locally through sliding filters, unlike traditional feedforward NNs, in which one layer is fully connected to the next layer and so on, enabling the extraction of relevant features. Ma et al. [
62] proposed a CNN-based network-wide speed prediction model that can convert spatiotemporal traffic dynamics into the image space, outperforming other algorithms with an average accuracy improvement of around
. Zang et al. [
63] further improved the results with the introduction of a three-channel CNN. Although they could slightly improve the training process and accuracy, the robustness was still a concern. In the work of Yu et al. [
64], a Spatiotemporal Recurrent Convolutional Network (SRCN) was proposed that explores the advantages of DCNNs and LSTM. To improve the scalability and accuracy, Fouladgar et al. [
65] considered a decentralized method where each node can accurately predict in real time based on the neighboring station’s state utilizing a regularized euclidean loss function.
Table 8 summarizes the works found using CNNs and their focus, limitations, and performances.
3.9. Deep Belief Networks
Deep Belief Networks (DBN) are multiple layers of restricted Boltzmann machines (RBMs) with nondirectional connections between the layers and are able to learn a probability distribution over the input data. Hong et al. [
66] proposed a multitask grouping neural network with a regression output layer at the top and a DBN on the bottom that achieved around
% accuracy in traffic flow forecasting. Tan et al. [
67] introduced two DBNs, one having Gaussian visible units and hidden binary units and the remaining units being binary, with results showing an improvement in the accuracy, but less robust nonetheless. Chen et al. [
68] combined a DBN with Gaussian–Bernoulli restricted Boltzmann machines and a BPNN to improve the accuracy further, but robustness was still a concern. To enhance the prediction accuracy and robustness, Koesdwiady et al. [
69] correlated weather parameters and traffic flow by employing a decision-level data fusion scheme. In the work of Bao et al. [
4], the weather condition was also used, and the employed Support Vector Regression (SVR) to derive an improved DBN, which showed a good improvement both in robustness and accuracy.
Table 9 summarizes the works found using DBNs and their focus, limitations, and performances.
3.10. Fuzzy Neural Networks
Fuzzy Neural Networks (FNNs) combine the merits of fuzzy systems and NNs. They can learn membership functions and appropriate fuzzy rules by engaging the adaptive approximation ability of NNs. Additionally, FNN models have better interpretability compared to NN-based models. Yin et al. [
70] proposed an online-training-based FNN where the fuzzy approach was used to cluster the data and used an NN to specify the input–output relationships. The results showed good performance, in particular for less traffic fluctuation. Quek et al. [
71] introduced a Pseudo-Outer-Product FNN using the Truth-Value-Restriction method (POPFNN-TVR), but it was less capable of counteracting noisy data. Zhao [
72] combined an Interval Type-2 Fuzzy Neural Network (IT2FNN) and self-organizing learning algorithm that somehow failed to achieve performance improvement. However, Li [
73] was successful in improving the accuracy by introducing Dynamic Fuzzy Neural Networks (D-FNNs) for traffic flow prediction. Still, the model showed a lack of robustness and a relatively slow learning process. Tang et al. [
74] mainly aimed at improving the learning ability by suggesting an FNN model with both unsupervised and supervised learning processes, by employing a K-means method and a Gaussian fuzzy membership function; on the other hand, a weighted recursive least squares estimator was used in the supervised learning process. They not only improved the learning ability, but also achieved a 5% improvement in accuracy. In the work of An et al. [
75], the focus was given to robustness by proposing a Fuzzy-based Convolutional Neural Network (F-CNN) method to incorporate uncertain traffic accident information, achieving a superior performance compared to other state-of-the-art works.
Table 10 summarizes the works found using FNNs with their limitations and performances.
3.11. Other NNs
3.11.1. Autoencoders
To solve the problem of the fuzziness and uncertainty of traffic states in a signalized intersection, Stacked Autoencoder (SAE) models are commonly employed. Lv et al. [
76] and Yang et al. [
77] are two of the pioneers who applied the SAE model to traffic forecasting. They used SAEs to learn generic traffic flow features and trained them in a greedy layerwise fashion. Although the accuracy was promising, the models lacked robustness. Xiang and Chen [
78] proposed a denoising SAE model consisting of K-means clustering and deep autoencoder networks to improve the robustness and accuracy, reaching a
% and 88% accuracy in simulation and empirical data, respectively (
% better than other decision-tree models).
Table 11 indicates the works found using AEs with a focus on their limitations and performance.
3.11.2. Modular Neural Networks
Real-time information can predict link travel times and is suitable for to be employed in Modular Neural Networks (MNNs). Generally, unsupervised clustering techniques and MNNs are used to classify and predict link travel times, respectively. In the work of Park et al. [
79], it was found that the MNN could give the best overall results compared to other relevant models. Ishak and Alecsandru [
80] proposed multimodal techniques to improve prediction performance, but the results showed a lack of robustness. Vlahogianni et al. [
81] suggested an MNN consisting of temporal genetically optimized structures of MLPs and showed a good improvement of accuracy with an MSE of
%.
Table 12 indicates the works found using MNNs and their focus, limitations, and performances.
3.11.3. Self-Organizing Neural Networks
These traffic forecasting models are based on Self-Organizing map Neural Networks (SONNs) and Self-Organizing Fuzzy Neural Networks (SOFNNs). Tung and Quek [
82] combined the fuzzy approach with a self-organizing neural network and proposed the Generic Self-organizing Fuzzy Neural Network (GenSoFNN) algorithm, which showed encouraging performance, obtaining an MSE of
. Boto-Giralda et al. [
83] proposed a SONN model based on a stationary wavelet denoising process and a fuzzy ARTMAP. Ll and Huang [
84] proposed a traffic forecasting model using Autoregressive (AR) methods based on a Self-Organizing Map (SOM) neural network, significantly improving the prediction accuracy, yielding considerably better performance than other methods.
Table 13 presents the works found using SONNs and their focus, limitations, and performances.
3.11.4. Bayesian Neural Networks
When the Bayesian Combined Predictor (BCP) uses an artificial neural network, it is called a BNN. Such a design intends to combine the strengths of neural networks and stochastic modeling. BNN models can generate a complete posterior distribution and produce probabilistic guarantees of the predictions (Petridis et al. [
85]). Chan et al. [
86] proposed an Adaptive Particle Swarm Optimization (APSO) utilizing Bayesian regularization to minimize the overfitting problem, showing relevant efficiency improvements in traffic forecasting. To improve the accuracy, Gu et al. [
87] proposed an Improved Bayesian Combination Model with Deep Learning (IBCM-DL) to increase not only the accuracy, but also the stability. AlKheder et al. [
88] focused on evaluating the impacts of adjacent intersections in terms of the traffic volume and using a BCNN; the authors were able to show improvements in both model coherency and accuracy with an average MSE of
during weekdays.
Table 14 presents the works found using BNNs and their focus, limitations, and performances.
3.11.5. Resource Allocating Networks
A Resource Allocating Network (RAN) allocates new units and adjusts the parameters of existing units in the learning process. If the network performs poorly on a presented pattern, a new unit is allocated to better represent the pattern, with network parameters being updated only when the results are satisfactory on the presented pattern. Although the RAN is mainly designed for mobile network management, it can also be applied in road traffic forecasting. Chen and Grant-Muller [
89] investigated the potential of dynamic neural networks to forecast motorway traffic in normal and abnormal conditions, highlighting the importance of RANs. Bouyahia et al. [
90] used the Markov Random Field (MRF) to model and predict the spread of traffic congestion and the Markov Decision Process (MDP) to allocate traffic resources, showing good improvement in accuracy. To further improve the performance, Cui et al. [
91] used a RAN in road traffic prediction by employing a controller of the network slice that periodically collected the information to predict future road traffic and applied the Bayesian Attractor Model (BAM) to estimate the required resources.
Table 15 presents the works found using RANs and their focus, limitations, and performances.
3.11.6. Generative Adversarial Networks
First introduced by Goodfellow et al. [
92], Generative Adversarial Networks (GAN) are composed of two NNs, competing against each other in order to generate new synthetic instances of data that can pass for real data. As a GAN can learn the joint distribution of the data and more effectively address the blurry prediction issue, it can be used to learn the distribution of future traffic flows conditioned on previous traffic flows and the most likely sample from the distribution as the prediction result. Liang et al. [
93] proposed a deep Generative Adversarial Architecture (GAA) for network-wide prediction consisting of two LSTMs, and the experimental results showed much better performance compared to a BNN. To further increase the accuracy, Zhang et al. [
94] proposed TrafficGAN employing both the CNN and LSTM models, which achieved an MAE of
during weekdays for a 30 min prediction horizon. In the work of Liang Zhang et al. [
95], a Self-Attention Generative Adversarial Network (SATP-GAN) was proposed that used Reinforcement Learning (RL), showing an improvement of
% over baseline methods. Different approaches of integrating rules as inductive biases into deep-learning-based prediction models were evaluated by Li et al. [
96], confirming the usefulness of GANs in achieving better performance.
Table 16 presents the works found using GANs with their focus, limitations, and performances.
3.12. Hybrid Schemes
Hybrid approaches in short-term traffic flow forecasting have been also commonly employed; in fact, most recent works are based on different hybrid approaches due to their higher performances when compared to other methods.
3.12.1. ARIMA, BPNNs, and GARCH
In these approaches, first, the linear features of time series are captured by an ARIMA model. For nonlinear features, a BPNN is then employed. To overcome the BPNN’s disadvantages of slow convergence and to avoid falling into local minima, the Simulated Annealing (SA) algorithm is used (Yang et al. [
97]). The joint ARIMA and Generalized Autoregressive Conditional Heteroskedasticity (GARCH) modeling approach can improve short-term ridership forecasting accounting for dynamic volatility, providing not only the expected value, but also, the prediction interval can be obtained (Lin et al. [
98], Ding et al. [
99]).
3.12.2. KNN-LSTM
Generally, in KNN-LSTM schemes, the KNN is used to capture spatial features and LSTM to model the temporal variability of traffic flow. A two-layer LSTM network can be applied to predict traffic flow, and the final prediction results are obtained by result-level fusion with the rank-exponent weighting method. It exhibits competitive performance when compared with well-known prediction models (Luo et al. [
100]). Li et al. [
101] introduced a Diffusion Convolutional Recurrent Neural Network (DCRNN), achieving an MAE of
for a 1 h prediction horizon. Yu et al. [
102] proposed a Spatiotemporal Recurrent Convolutional Network (SRCN) combining DCNN and LSTM, which showed superior results both in long- and short-term forecasting. Allström et al. [
103] combined both parametric and nonparametric approaches in an ensemble Kalman filter, obtaining a MAPE of
for a 30 min prediction horizon. Kolidakis et al. [
104] combined Singular Spectrum Analysis (SSA) with Artificial Neural Networks (ANNs) to provide proactive decisions to mitigate the economic and environmental impacts of traffic congestion.
Table 17 indicates the works found using hybrid schemes and their primary focus, limitations, and performances.
5. Discussion
A systematic literature search was performed in the Science Direct, Scopus, and Google Scholar databases with the following keywords in various combinations: “intelligent transportation”, “intelligent traffic management and control”, “image processing and deep learning-based intelligent traffic management and control”, “short-term traffic forecasting”, “image processing and deep learning-based short-term traffic forecasting”, “intersection traffic signal control”, “image processing and deep learning-based intersection traffic signal control”. One-hundred forty-four fully fledged research articles were finally selected based on the following inclusion criteria: most relevant, most cited, and most recent. For traffic state forecasting, in terms of performances, the GAN-based methods and also hybrid approaches showed better performance on state-of-the-art datasets, i.e., PeMS (Li et al. [
154], Zhang et al. [
95]). For intersection signal control, DRL- and DQN-based approaches showed much better efficiency and robustness (Wang et al. [
155], Bouktif et al. [
9]) relative to other baselines. However, no model is self-sufficient to address all the problems, and hence, plenty of scope for improvement exists. A comparative analysis followed by a very brief summary of the fundamental research challenges is presented in the following sections.
5.1. Why Deep Learning?
Traffic states are generally affected by long-term and short-term traffic features. As an example, during the weekdays, traffic flow will always show a rapid increment and decrement in the morning and evening, respectively, referred to as long-term features, because it is affected by society’s behaviors. There might be uncertain fluctuations due to adverse weather, traffic accidents, and other nonrecurrent events, which are called short-term features. For a model to capture these features, a considerable amount of data must be processed efficiently.
Moreover, the corrupted or missing value problem is common in time series data, which is difficult to address by traditional machine-learning approaches. Additionally, the traffic states of the intersections are interrelated with their adjacent counterparts. An efficient intersection traffic signal control demands perceiving of the environments correctly, to take actions accordingly in a coordinated manner. Traditional machine-learning approaches have limitations in handling these demands. Deep-learning-based methods, on the contrary, have a much better ability to overcome these problems efficiently.
5.2. Comparative Analysis
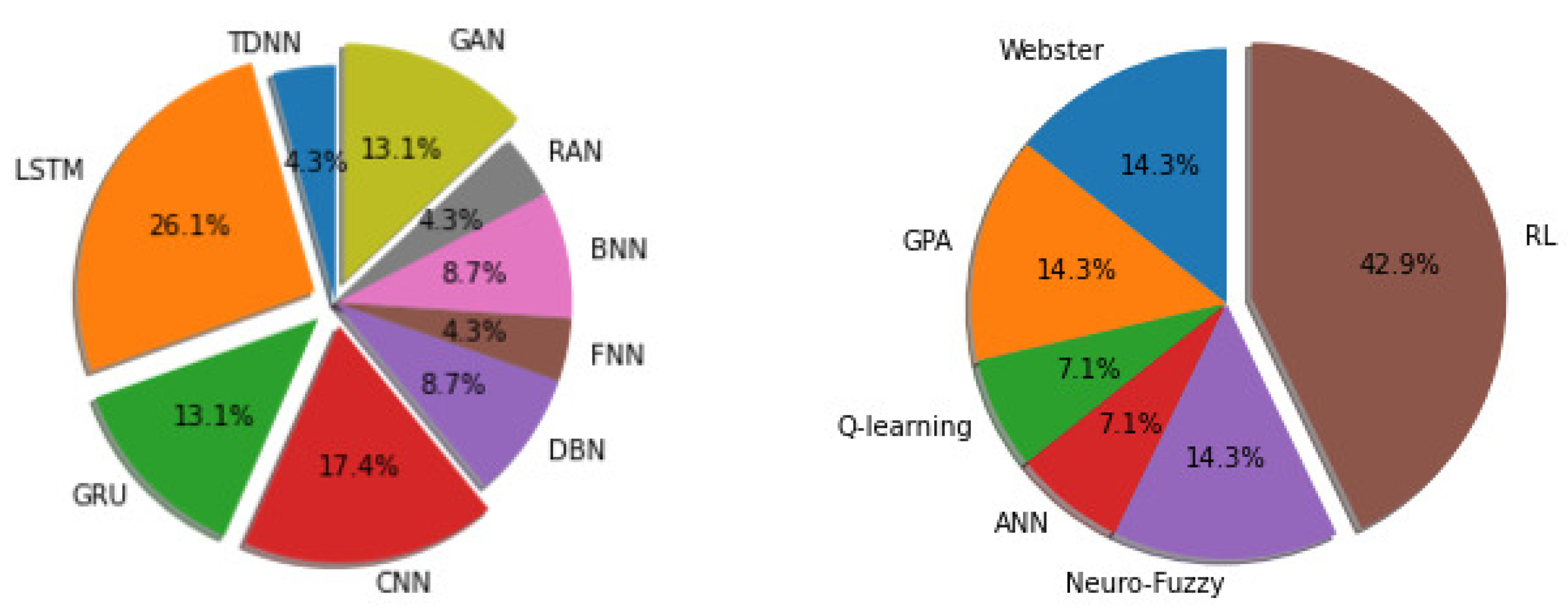
One way to find out whether a method in ITMC is efficient or not is to analyze the number of documents published in recent times based on those techniques. In recent years, mainly from 2019, researchers have been applying the LSTM, GRU, CNN, GAN, DBN, FNN, BNN, RAN, and TDNN approaches in traffic state prediction and for intersection signal control. The approaches of RL, GPA, Hybrid, ANN, and Webster’s method have been deployed. For traffic state prediction, out of the 71 studied articles,
% of the works published between 2019 and 2021 were based on RNNs (LSTM and GRU more precisely). On the other hand, for intersection traffic signal control,
% of the works out of 73 utilized reinforcement learning-based methods (DQN and DRL) within the same time horizon, as is depicted in
Figure 5.
However, the best way to judge the suitability of a method is to analyze it in terms of its performance. CNN-based traffic state prediction methods trained on datasets without any missing values revealed superior performance compared to other baselines. This is because CNN-based models can capture the spatiotemporal features more efficiently than other models. For example, a SRCN-based forecasting model achieved an RMSE of
on the PeMSD7 dataset (Yu et al. [
64]). One major problem with this kind of method is robustness. With the arrival of nonrecurrent events such as congestion, their performance deteriorates. To achieve higher robustness, LSTM-based methods with an effective mechanism to counteract non-Gaussian disturbances showed much better performance relative to other methods, for example, in the work of Lu et al. [
54].
On the contrary, a considerable amount of time series data is required for good performance, and it is challenging to find datasets without any missing value problems. The GAN-based approaches overcome these problems by providing new artificial data of the same quality as the training data. Furthermore, the CNN and LSTM embedded GAN-based methods have shown the best performance so far, by achieving an RMSE of
for prediction over a long time horizon (Zhang et al. [
94]).
Multi-agent deep-reinforcement-learning-based methods are expected to be dominant over other state-of-the-art methods for intersection traffic signal control. Traffic states are highly unpredictable, and the states of an intersection depend on others. Hence, coordination among the different intersections is essential. Multi-agent deep-reinforcement-learning-based methods possess the provision to cope with this. For example, the knowledge-sharing deep deterministic policy gradient algorithm showed an average reduction of the queue length and intersection delay by
% and
%, respectively, relative to the MaxPressure (MP) method (Li et al. [
154]).
5.3. Research Challenges
5.3.1. Need for Better Datasets
Most of the works studied in the literature used personally collected datasets, as quality fully publicly available datasets are scarce. Nonetheless, PeMS from the Caltrans Performance Measurement System was mainly used by the researchers (Li et al. [
101], Lu et al. [
54]). The publicly available datasets found during our study are indicated in
Table 28.
5.3.2. Reduction of Computational Complexity
Most state-of-the-art models, in particular DL, typically require millions of parameters and billions of operations to produce human-level accuracy. The memory and computational requirements, in particular the deployment of low-power embedded platforms with lower power budgets, are challenging (Maghazeh et al. [
161]). Cloud-based infrastructures are a viable solution to this problem. However, privacy implications, the consumption of a significant amount of power, latency, and scalability are significant drawbacks that need to be addressed (Duan [
162]).
5.3.3. Model Interpretability
Deep NNs have been found to be very efficient in handling the complex nature of traffic. However, the complexity of the models often makes the understanding of the prediction results difficult, and issues arise about these models’ accuracy. The combination of FLS and NNs provides better model interpretability (Tang et al. [
74]). However, with the increase in traffic complexity, they fail to provide optimal outputs. Hence, there are plenty of opportunities to enhance the models’ interpretability.
5.3.4. Finding the Best Evaluation Methodologies
Different algorithms search for different trends and patterns. One algorithm may not be the best suited across all datasets. To find the best solution, it is necessary to evaluate them. Hence, evaluating how well a model generalizes to new and unseen data is very important. During this study, it was found that the F1-score, true positive rate, Mean Absolute Percent Error (MAPE), Mean Absolute Error (MAE), Root-Mean-Squared Error (RMSE), variance score, and value are often used as traffic forecasting model performance indicators. However, the Average Displacement Error (ADE), Final Displacement Error (FDE), and Maximum Distance (MaxDist) were also found to be used in some recent works.
On the other hand, modern researchers use the average waiting time, queue length, travel time, intersection delay, and fuel economy for intersection traffic signal control.
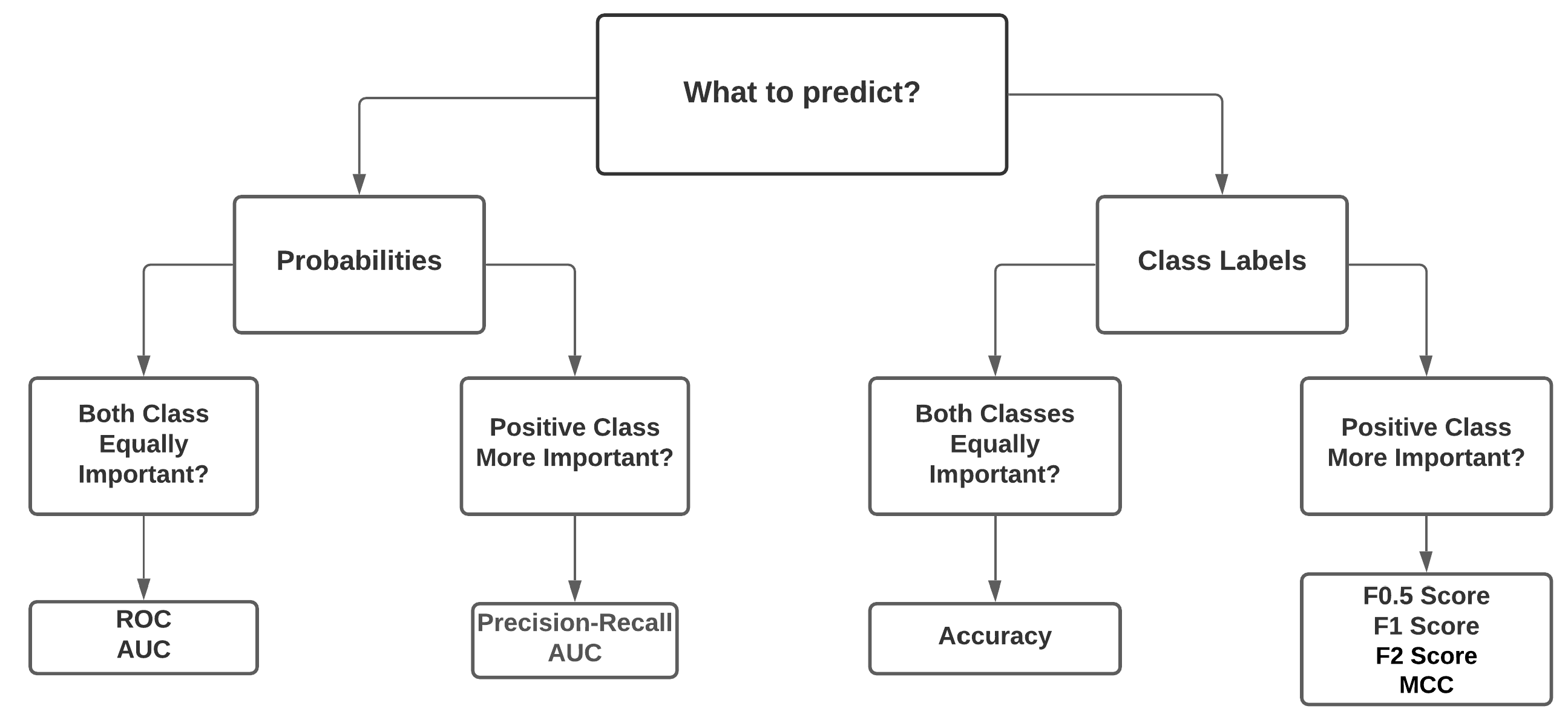
Figure 6 depicts the typically used evaluation metrics in different scenarios based on the studied works. Problems related to probability prediction, the Receiver Operating Characteristic (ROC), and the Area Under the Curve (AOC) are most suitable. While for class labels prediction, evaluation metrics should be selected based on the importance of the classes. For example, if all classes are equally important, “accuracy” can be used as an evaluation metric; otherwise, the F1-score, F2-score, and Matthews Correlation Coefficient (MCC) were found to be convenient. However, which one would be most suited to a particular problem or whether it is necessary to find new evaluation techniques needs to be addressed further.
To evaluate the intersection signal control methods/strategies, powerful simulation environments are utilized by researchers. These simulation tools are helpful for testing and assessing different dynamic transportation issues that are challenging to solve in the real world. On top of that, simulation environments can replace actual experiments with trustworthy representations of the subject matter in a controllable computer program and allow researchers to compare algorithms and reproduce experiments. In most of the recent works, for example, in Nilsson and Como [
130], Bouktif et al. [
9], and Li et al. [
154], the researchers employed the SUMO environment to evaluate their proposed methods.
Table 29 indicates the simulation environments found during this study.
5.3.5. Environmental Challenges
GPUs are often used to train and test NNs to deliver the highest arithmetic performance for 32 bit floating-point NN inference. However, operating at 200+ W, their use is becoming prohibitively expensive in terms of energy footprint. Research showed that the carbon footprint of NNs using GPUs is about five-times the lifetime emissions of an average car (Strubell et al. [
163]).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}