
Simply Fabricated Inexpensive Dual-Polymer-Coated Fabry-Perot Interferometer-Based Temperature Sensors with High Sensitivity

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
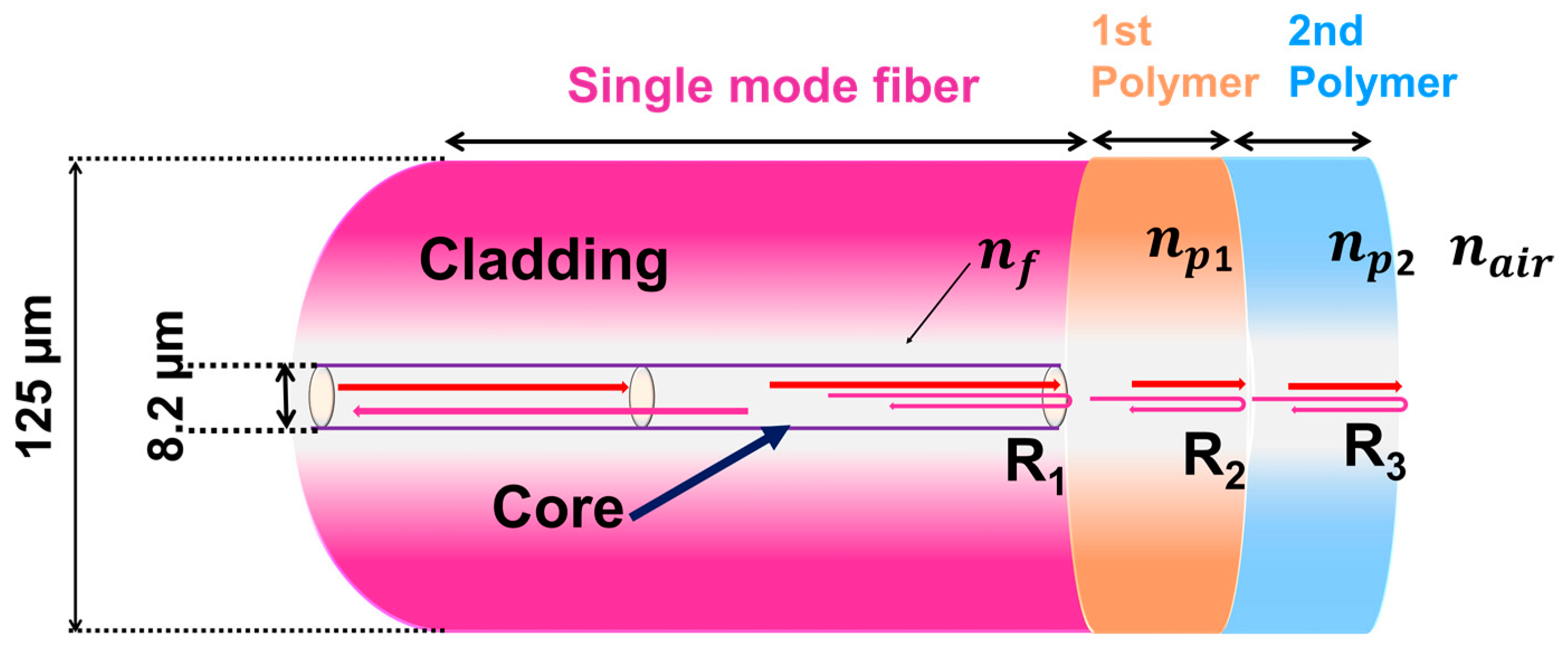
2.1. Principle of Operation
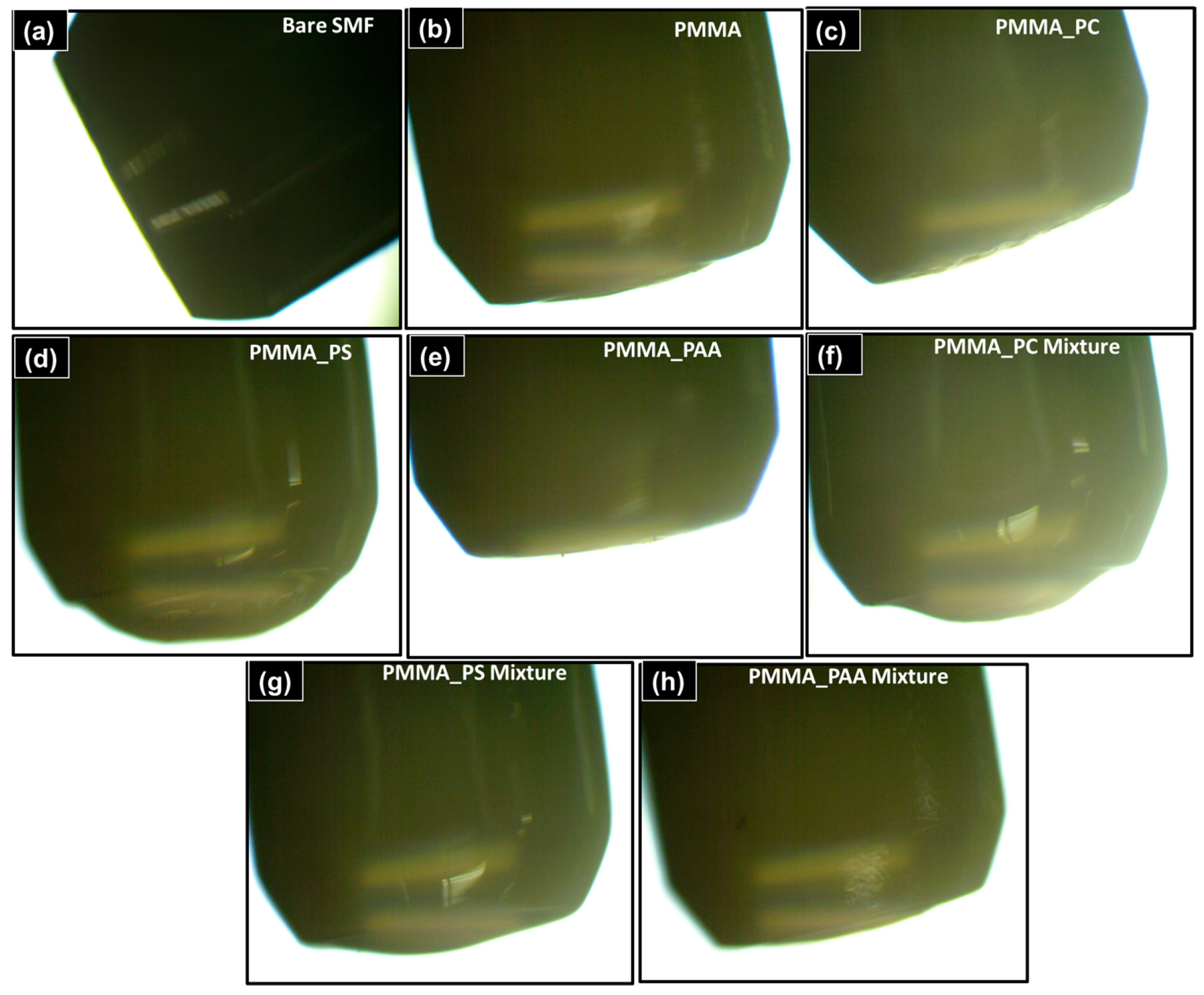
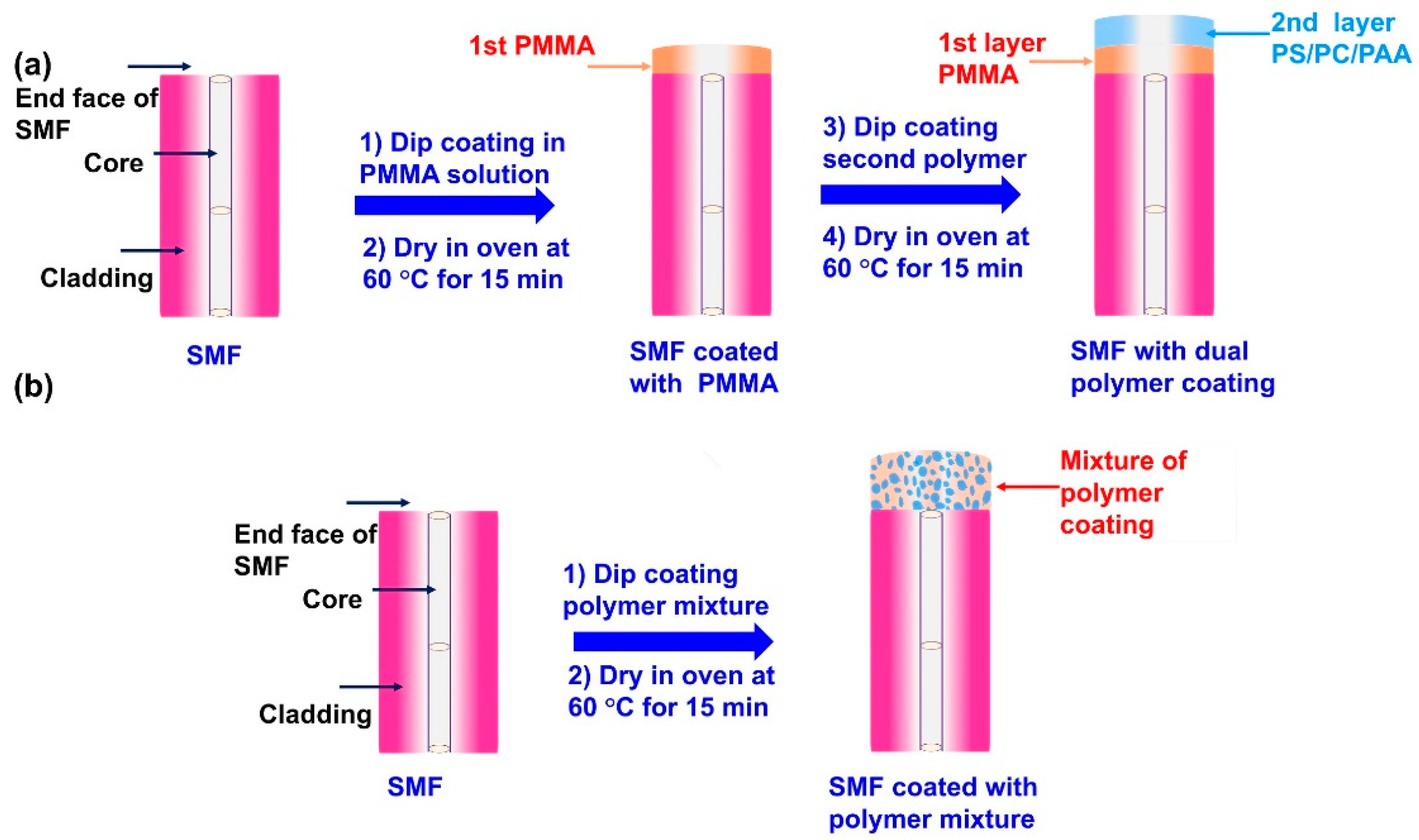
2.2. Sensor Fabrication
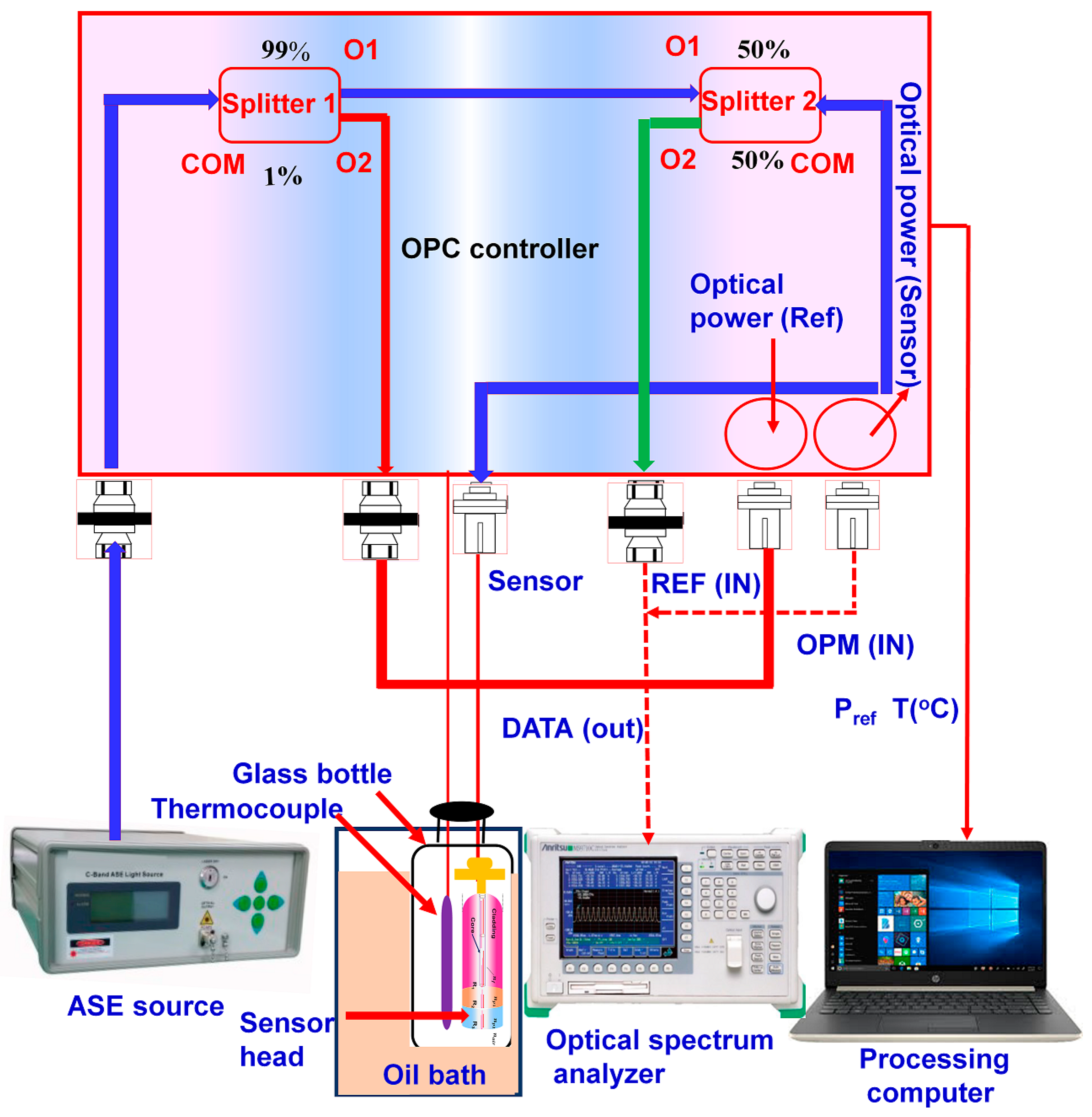
2.3. Measurement Setup
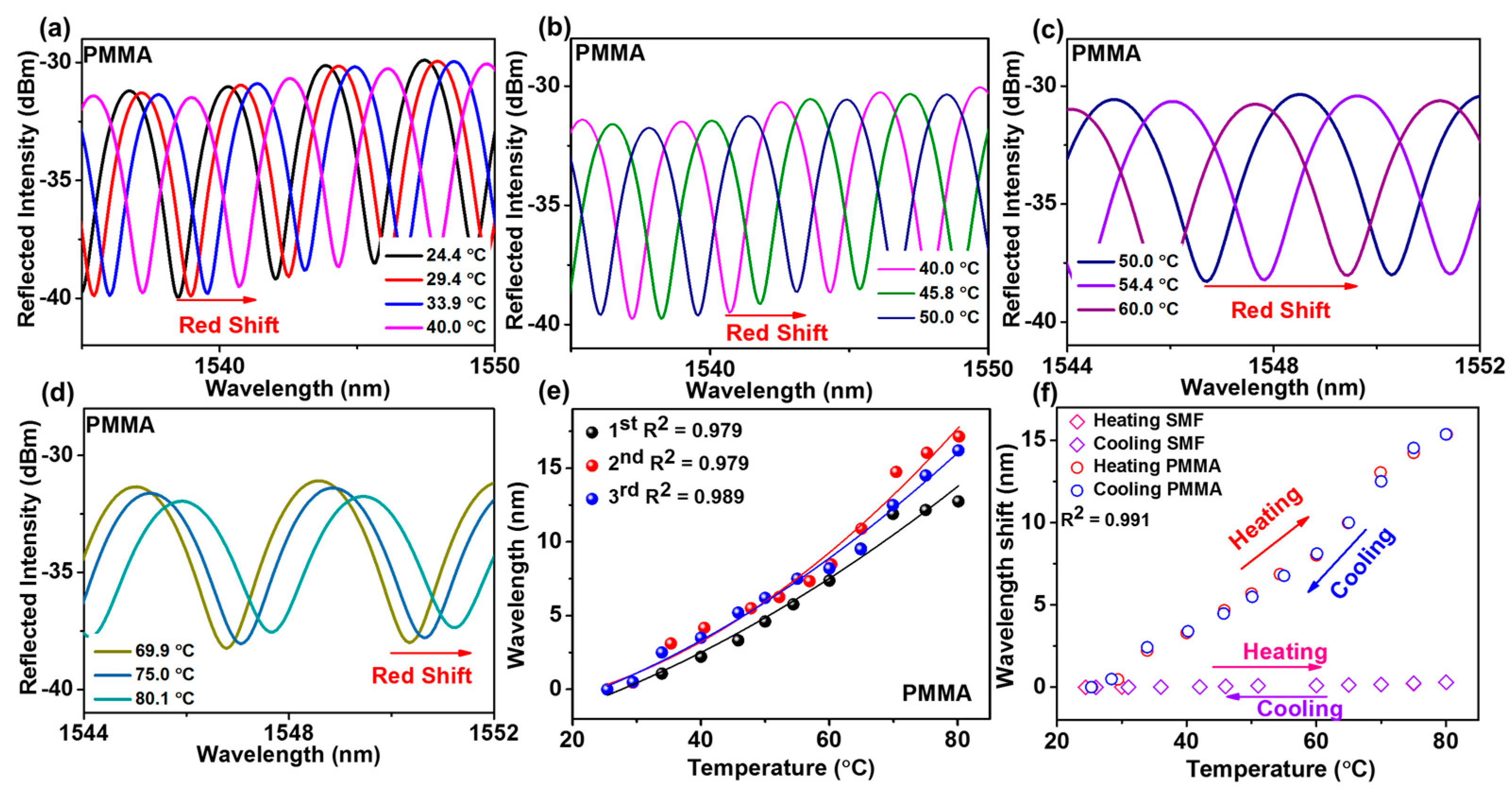
2.4. Temperature Response Test
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rong, Q.; Sun, H.; Qiao, X.; Zhang, J.; Hu, M.; Feng, Z. A miniature fiber-optic temperature sensor based on a Fabry–Perot interferometer. J. Opt. 2012, 14, 045002. [Google Scholar] [CrossRef]
- Chen, M.-Q.; Zhao, Y.; Xia, F.; Peng, Y.; Tong, R.-J. High sensitivity temperature sensor based on fiber air-microbubble Fabry-Perot interferometer with PDMS-filled hollow-core fiber. Sens. Actuators A Phys. 2018, 275, 60–66. [Google Scholar] [CrossRef]
- Yu, Z.; Yan, B.; Li, Z.; Ruan, X.; Zhang, Y.; Dai, Y. Graphene induced sensitivity enhancement of thin-film coated long period fiber grating. J. Appl. Phys. 2018, 124, 184503. [Google Scholar] [CrossRef]
- Ricchiuti, A.L.; Barrera, D.; Nonaka, K.; Sales, S. Temperature gradient sensor based on a long-fiber Bragg grating and time-frequency analysis. Opt. Lett. 2014, 39, 5729–5731. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pevec, S.; Donlagic, D. Miniature all-silica fiber-optic sensor for simultaneous measurement of relative humidity and temperature. Opt. Lett. 2015, 40, 5646–5649. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Sampath, U.; Song, M. Multi-Stress Monitoring System with Fiber-Optic Mandrels and Fiber Bragg Grating Sensors in a Sagnac Loop. Sensors 2015, 15, 18579–18586. [Google Scholar] [CrossRef] [Green Version]
- Guzmán-Sepúlveda, J.R.; Guzman-Cabrera, R.; Torres-Cisneros, M.; Sánchez-Mondragón, J.; May-Arrioja, D. A Highly Sensitive Fiber Optic Sensor Based on Two-Core Fiber for Refractive Index Measurement. Sensors 2013, 13, 14200–14213. [Google Scholar] [CrossRef] [Green Version]
- Pevec, S.; Donlagic, D. Miniature fiber-optic sensor for simultaneous measurement of pressure and refractive index. Opt. Lett. 2014, 39, 6221–6224. [Google Scholar] [CrossRef]
- Ferreira, M.S.; Santos, J.L.; Frazão, O. Silica microspheres array strain sensor. Opt. Lett. 2014, 39, 5937–5940. [Google Scholar] [CrossRef]
- Consales, M.; Berruti, G.; Borriello, A.; Giordano, M.; Buontempo, S.; Breglio, G.; Makovec, A.; Petagna, P.; Cusano, A. Nanoscale TiO2-coated LPGs as radiation-tolerant humidity sensors for high-energy physics applications. Opt. Lett. 2014, 39, 4128–4131. [Google Scholar] [CrossRef]
- Huang, C.; Weijing, X.; Yang, M.; Dai, J.; Zhang, B. Optical Fiber Fabry—Perot Humidity Sensor Based on Porous Al2O3 Film. IEEE Photonics Technol. Lett. 2015, 27, 2127–2130. [Google Scholar] [CrossRef]
- Bae, H.; Yun, D.; Liu, H.; Olson, D.A.; Yu, M. Hybrid Miniature Fabry—Perot Sensor with Dual Optical Cavities for Simultaneous Pressure and Temperature Measurements. J. Lightwave Technol. 2014, 32, 1585–1593. [Google Scholar] [CrossRef]
- Gong, H.; Wang, D.N.; Xu, B.; Ni, K.; Liu, H.; Zhao, C.L. Miniature and robust optical fiber in-line Mach–Zehnder interferometer based on a hollow ellipsoid. Opt. Lett. 2015, 40, 3516–3519. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Díaz, C.A.R.; Frizera, A.; Marques, C.; Ribeiro, M.R.N.; Pontes, M.J. Simultaneous measurement of pressure and temperature with a single FBG embedded in a polymer diaphragm. Opt. Laser Technol. 2019, 112, 77–84. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Theodosiou, A.; Marques, C.; Pontes, M.J.; Kalli, K.; Frizera, A. Compensation Method for Temperature Cross-Sensitivity in Transverse Force Applications with FBG Sensors in POFs. J. Lightwave Technol. 2018, 36, 3660–3665. [Google Scholar] [CrossRef]
- Ran, Z.L.; Rao, Y.J.; Liu, W.J.; Liao, X.; Chiang, K.S. Laser-micromachined Fabry—Perot optical fiber tip sensor for high-resolution temperature-independent measurement of refractive index. Opt. Express 2008, 16, 2252–2263. [Google Scholar] [CrossRef]
- Chen, J.; Huang, X. Fresnel-reflection-based fiber sensor for on-line measurement of ambient temperature. Opt. Commun. 2010, 283, 1674–1677. [Google Scholar] [CrossRef]
- Guo, H.; Pang, F.; Zeng, X.; Chen, N.; Chen, Z.; Wang, T. Temperature sensor using an optical fiber coupler with a thin film. Appl. Opt. 2008, 47, 3530–3534. [Google Scholar] [CrossRef]
- Nguyen, L.V.; Hwang, D.; Moon, S.; Moon, D.S.; Chung, Y. High temperature fiber sensor with high sensitivity based on core diameter mismatch. Opt. Express 2008, 16, 11369–11375. [Google Scholar] [CrossRef]
- Wu, C.; Fu, H.Y.; Qureshi, K.K.; Guan, B.-O.; Tam, H.Y. High-pressure and high-temperature characteristics of a Fabry–Perot interferometer based on photonic crystal fiber. Opt. Lett. 2011, 36, 412–414. [Google Scholar] [CrossRef] [Green Version]
- Du, Y.; Qiao, X.; Rong, Q.; Yang, H.; Feng, D.; Wang, R.; Hu, M.; Feng, Z. A Miniature Fabry–Perot Interferometer for High Temperature Measurement Using a Double-Core Photonic Crystal Fiber. IEEE Sens. J. 2014, 14, 1069–1073. [Google Scholar] [CrossRef]
- Arregui, F.J.; Matias, I.R.; Cooper, K.L.; Claus, R.O. Simultaneous measurement of humidity and temperature by combining a reflective intensity-based optical fiber sensor and a fiber Bragg grating. IEEE Sens. J. 2002, 2, 482–487. [Google Scholar] [CrossRef]
- Sampath, U.; Kim, D.; Kim, H.; Song, M. Cryogenic Temperature Sensor Based on Fresnel Reflection from a Polymer-Coated Facet of Optical Fiber. IEEE Sens. J. 2018, 18, 3640–3644. [Google Scholar] [CrossRef]
- Hernandez-Romano, I.; Monzon-Hernandez, D.; Moreno-Hernandez, C.; Moreno-Hernandez, D.; Villatoro, J. Highly Sensitive Temperature Sensor Based on a Polymer-Coated Microfiber Interferometer. IEEE Photonics Technol. Lett. 2015, 27, 2591–2594. [Google Scholar] [CrossRef]
- Bariáin, C.; Matias, I.; Arregui, F.; Lopez-Amo, M. Optical fiber humidity sensor based on a tapered fiber coated with agarose gel. Sens. Actuators B Chem. 2000, 69, 127–131. [Google Scholar] [CrossRef]
- Mathew, J.; Semenova, Y.; Farrell, G. Relative Humidity Sensor Based on an Agarose-Infiltrated Photonic Crystal Fiber Interferometer. IEEE J. Sel. Top. Quantum Electron. 2012, 18, 1553–1559. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, F.; Liu, Z.; Duan, Z.; Cui, W.; Han, J.; Gu, Y.; Wu, Z.; Jing, Z.; Sun, C.; et al. Fiber-optic anemometer based on single-walled carbon nanotube coated tilted fiber Bragg grating. Opt. Express 2017, 25, 24521–24530. [Google Scholar] [CrossRef]
- Estella, J.; de Vicente, P.; Echeverría, J.C.; Garrido, J.J. A fibre-optic humidity sensor based on a porous silica xerogel film as the sensing element. Sens. Actuators B Chem. 2010, 149, 122–128. [Google Scholar] [CrossRef]
- Zhao, J.-R.; Huang, X.G.; He, W.-X.; Chen, J.-H. High-Resolution and Temperature-Insensitive Fiber Optic Refractive Index Sensor Based on Fresnel Reflection Modulated by Fabry—Perot Interference. J. Lightwave Technol. 2010, 28, 2799–2803. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Díaz, C.R.; Marques, C.; Frizera, A.; Pontes, M.J. Analysis of viscoelastic properties influence on strain and temperature responses of Fabry—Perot cavities based on UV-curable resins. Opt. Laser Technol. 2019, 120, 105743. [Google Scholar] [CrossRef]
- Sun, H.; Luo, H.; Wu, X.; Liang, L.; Wang, Y.; Ma, X.; Zhang, J.; Hu, M.; Qiao, X. Spectrum ameliorative optical fiber temperature sensor based on hollow-core fiber and inner zinc oxide film. Sens. Actuators B Chem. 2017, 245, 423–427. [Google Scholar] [CrossRef]
- Oliveira, R.; Bilro, L.; Nogueira, R.; Rocha, A.M. Adhesive Based Fabry–Perot Hydrostatic Pressure Sensor With Improved and Controlled Sensitivity. J. Lightwave Technol. 2019, 37, 1909–1915. [Google Scholar] [CrossRef]
- Lee, S.; Park, C.; Kim, I.T. Enhancing Temperature Sensitivity of the Fabry—Perot Interferometer Sensor with Optimization of the Coating Thickness of Polystyrene. Sensors 2020, 20, 794. [Google Scholar]
- Lee, C.-L.; You, Y.-W.; Dai, J.-H.; Hsu, J.-M.; Horng, J.-S. Hygroscopic polymer microcavity fiber Fizeau interferometer incorporating a fiber Bragg grating for simultaneously sensing humidity and temperature. Sens. Actuators B Chem. 2016, 222, 339–346. [Google Scholar] [CrossRef]
- Salunkhe, T.T.; Lee, H.K.; Choi, H.W.; Park, S.J.; Kim, J.H.; Kim, I.T. High sensitivity temperature sensor based on Fresnel reflection with thermosensitive polymer: Control of morphology and coating thickness. Jpn. J. Appl. Phys. 2020, 59, SGGG06. [Google Scholar] [CrossRef]
- Ge, M.; Li, Y.; Han, Y.; Xia, Z.; Guo, Z.; Gao, J.; Qu, S. High-sensitivity double-parameter sensor based on the fibre-tip Fabry—Pérot interferometer. J. Mod. Opt. 2017, 64, 596–600. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, P.; Lin, P.; Sun, F. Thermo-optic coefficients of polymers for optical waveguide applications. Polymer 2006, 47, 4893–4896. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polymer | Refractive Index | TOC (°C−1) | TEC (°C−1) | Tg (°C) | Used Solvent for 10 wt% | Ref. |
|---|---|---|---|---|---|---|
| PMMA | 1.48 | −1.3 × 10−4 | 2.2 × 10−4 | 80–105 | Chloroform | [33,37] |
| PC | 1.585 | −0.9 × 10−4 | 1.7 × 10−4 | 145 | Chloroform | [33,37] |
| PS | 1.59 | −1.2 × 10−4 | 2.2 × 10−4 | 100 | Chloroform | [33,37] |
| PAA | 1.527 | - | - | 75–126 | Ethanol |
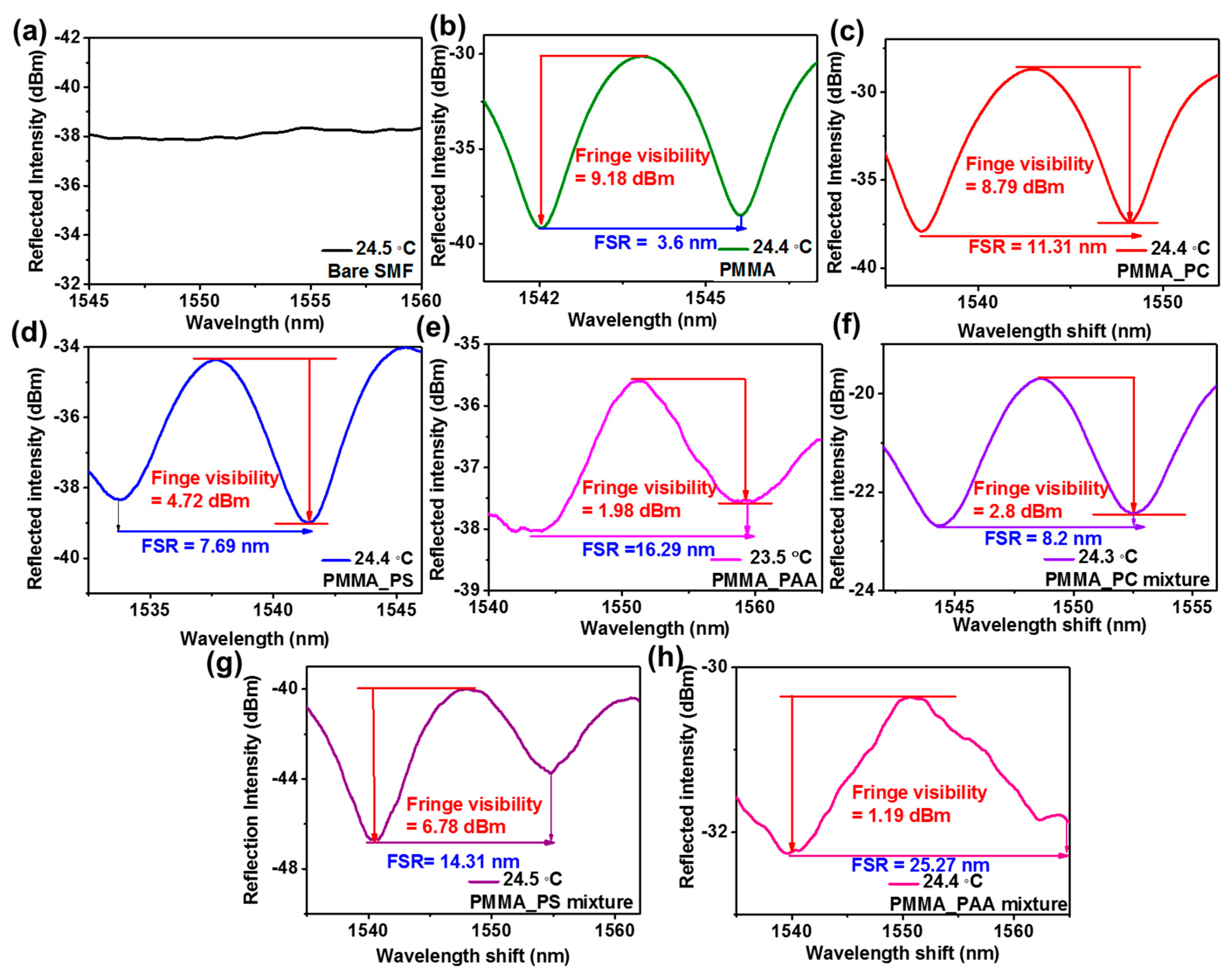
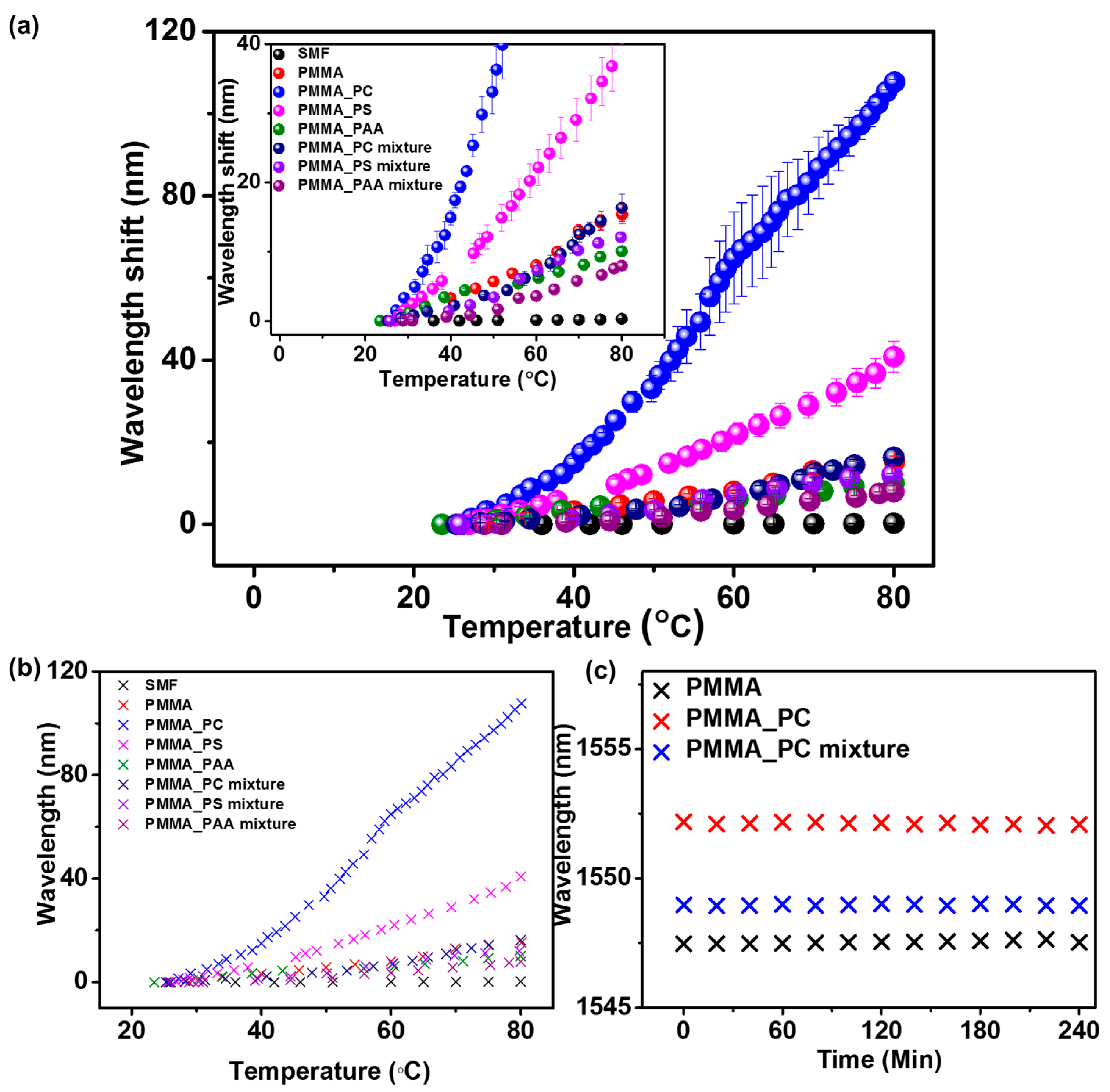
| Sensor | FSR (nm) | Fringe Visibility (dBm) | Average Temperature Sensitivity (pm °C−1) 24.4–80 °C | Standard Deviation of the Sensitivity (pm °C−1) | Average Temperature Sensitivity (pm °C−1) ~70–80 °C | Confidence Factor (R2) | Wavelength Shift (nm) | Wavelength Shift in Interval of Temperature (°C) |
|---|---|---|---|---|---|---|---|---|
| PMMA | 3.6 | 9.18 | 279.5 | 0.0407 | 355.86 | 0.991 | 2.25 | 8.1 |
| PMMA_PC | 11.3 | 8.79 | 2142.5 | 0.0469 | 2279.35 | 0.996 | 5.31 | 1.1 |
| PMMA_PS | 7.7 | 4.7 | 787.5 | 0.0121 | 1055.74 | 0.999 | 4.4 | 6.6 |
| PMMA_PAA | 16.3 | 1.98 | 198.42 | 0.057 | 207.43 | 0.983 | 3.33 | 12.5 |
| PMMA_PC mixture | 8.2 | 2.8 | 339.5 | 0.049 | 529.43 | 0.991 | 0.99 | 7.1 |
| PMMA_PS mixture | 14.3 | 6.8 | 233.0 | 0.018 | 235.85 | 0.991 | 2.21 | 6.0 |
| PMMA_PAA mixture | 25.3 | 1.2 | 164.6 | 0.0073 | 228.67 | 0.981 | 5.79 | 11.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salunkhe, T.T.; Lee, H.K.; Choi, H.W.; Park, S.J.; Kim, I.T. Simply Fabricated Inexpensive Dual-Polymer-Coated Fabry-Perot Interferometer-Based Temperature Sensors with High Sensitivity. Sensors 2021, 21, 7632. https://doi.org/10.3390/s21227632
Salunkhe TT, Lee HK, Choi HW, Park SJ, Kim IT. Simply Fabricated Inexpensive Dual-Polymer-Coated Fabry-Perot Interferometer-Based Temperature Sensors with High Sensitivity. Sensors. 2021; 21(22):7632. https://doi.org/10.3390/s21227632
Chicago/Turabian StyleSalunkhe, Tejaswi Tanaji, Ho Kyung Lee, Hyung Wook Choi, Sang Joon Park, and Il Tae Kim. 2021. "Simply Fabricated Inexpensive Dual-Polymer-Coated Fabry-Perot Interferometer-Based Temperature Sensors with High Sensitivity" Sensors 21, no. 22: 7632. https://doi.org/10.3390/s21227632