
Assessment of Impact Energy Harvesting in Composite Beams with Piezoelectric Transducers

 ,
,
Abstract
:1. Introduction
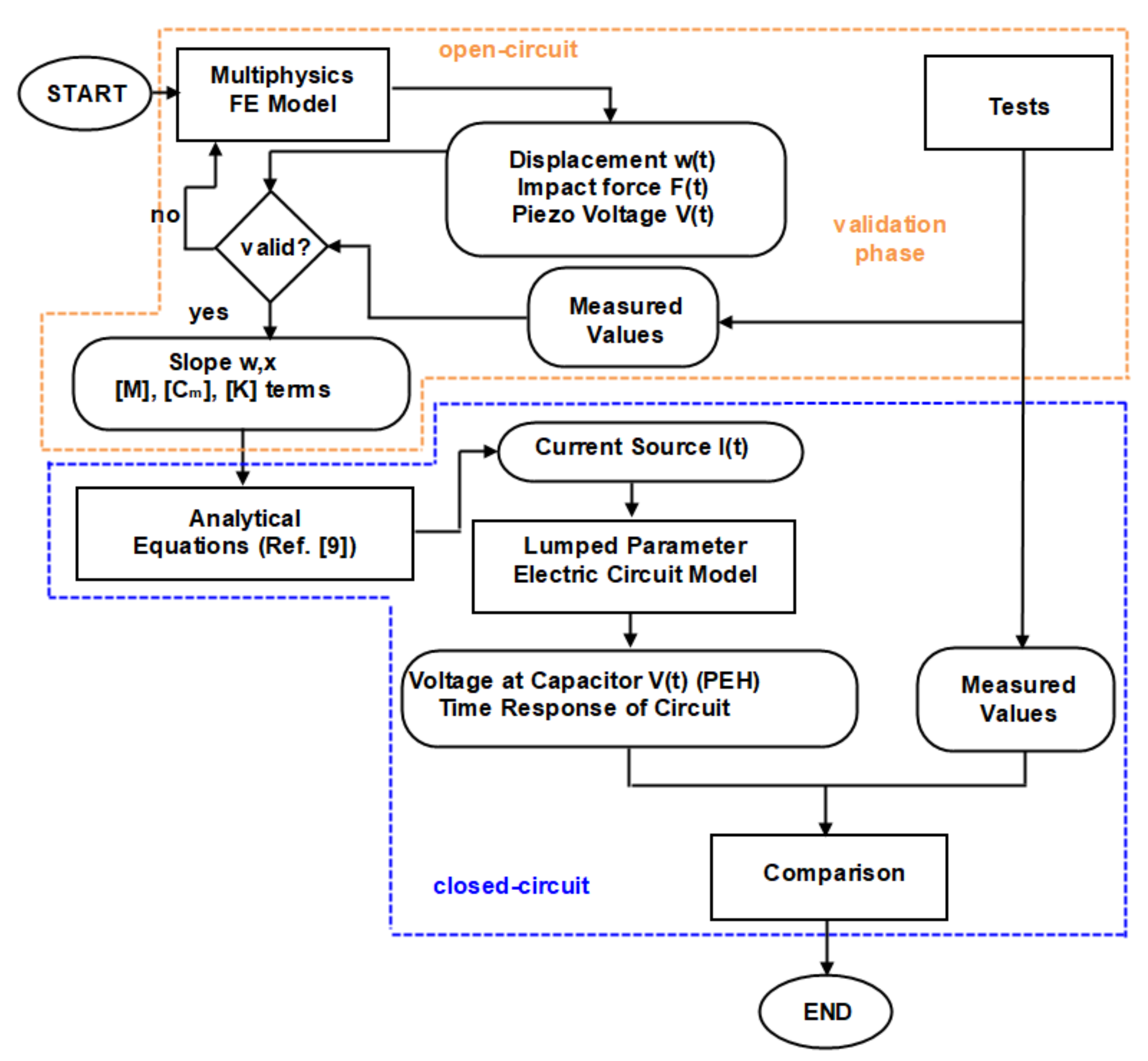
2. Description of the Method
2.1. Coupled Electromechanical System in Open-Circuit Conditions
2.2. Determination of the PEH Patch Model
- (a)
- Solving of Equation (5) for the free-vibration response of the open-circuit system in the frequency domain provides the eigenvectors, which are used for the formulation of the modal mass, damping, stiffness and force transformation matrices, respectively [52]:
- (b)
- The modal matrices are used for determining η:where u is a modal force amplitude scaling parameter that can be predicted by Equations (5) and (6) or obtained by measurement of the impact force. The linear system of Equation (13) consists of n uncoupled equations.
- (c)
- The electromechanical coupling coefficient κ is provided by Equation (11) using PE properties, geometrical parameters and the slope of the modal transverse displacement. The latter is directly calculated in modal space, in addition to the eigenvectors and modal matrices, by implementing a C1-continuous 2D higher-order layerwise FE [47], which encompasses this slope as a nodal DOF.
- (d)
- The electric current flowing through the PEH circuit is calculated using Equation (10). As an alternative to points (b–c), η may be derived at the point of excitation by means of a high-speed camera.
- (e)
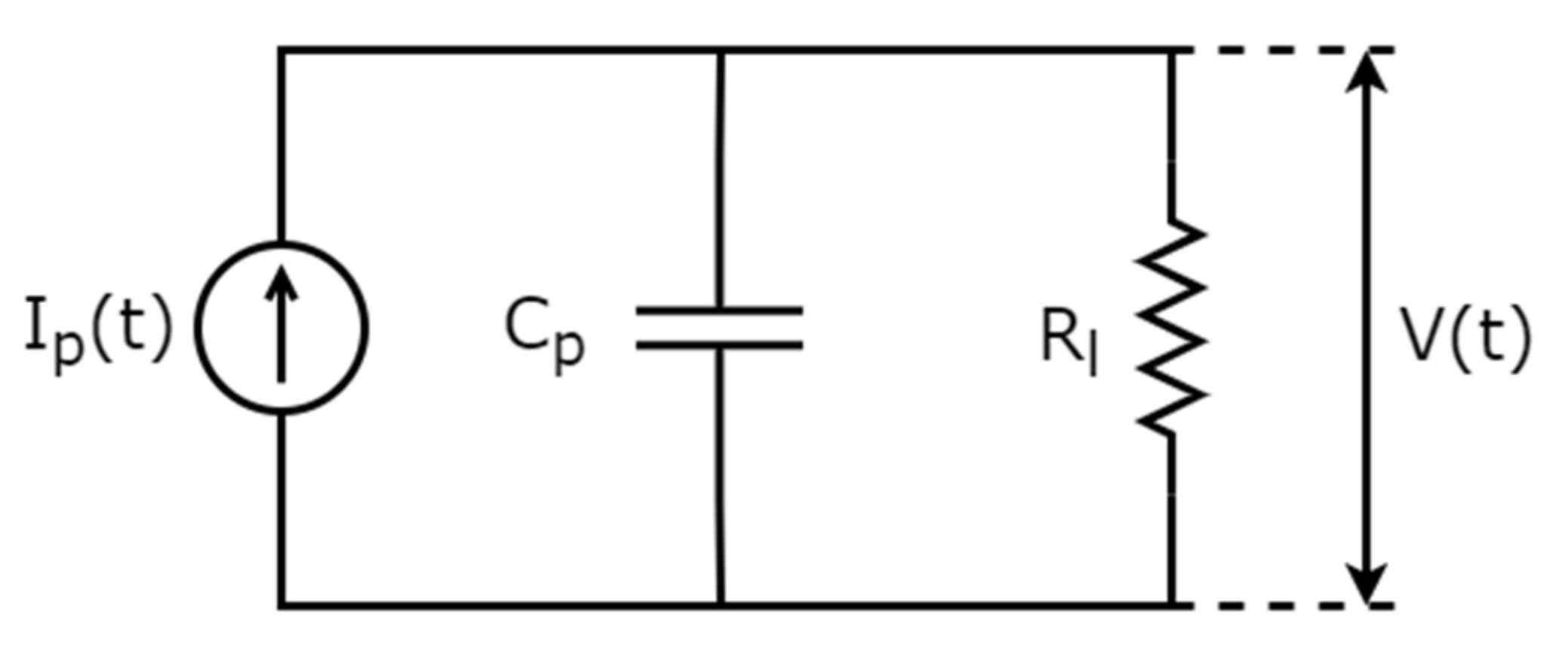
- The PE transducer is modelled in the PEH circuit as a current source and a capacitor with Cp appearing in Equation (8).
- (f)
- The harvested power may be calculated as:where Vout and Iout are respectively the voltage and current in the discharging branch of the PEH circuit described in the following section.
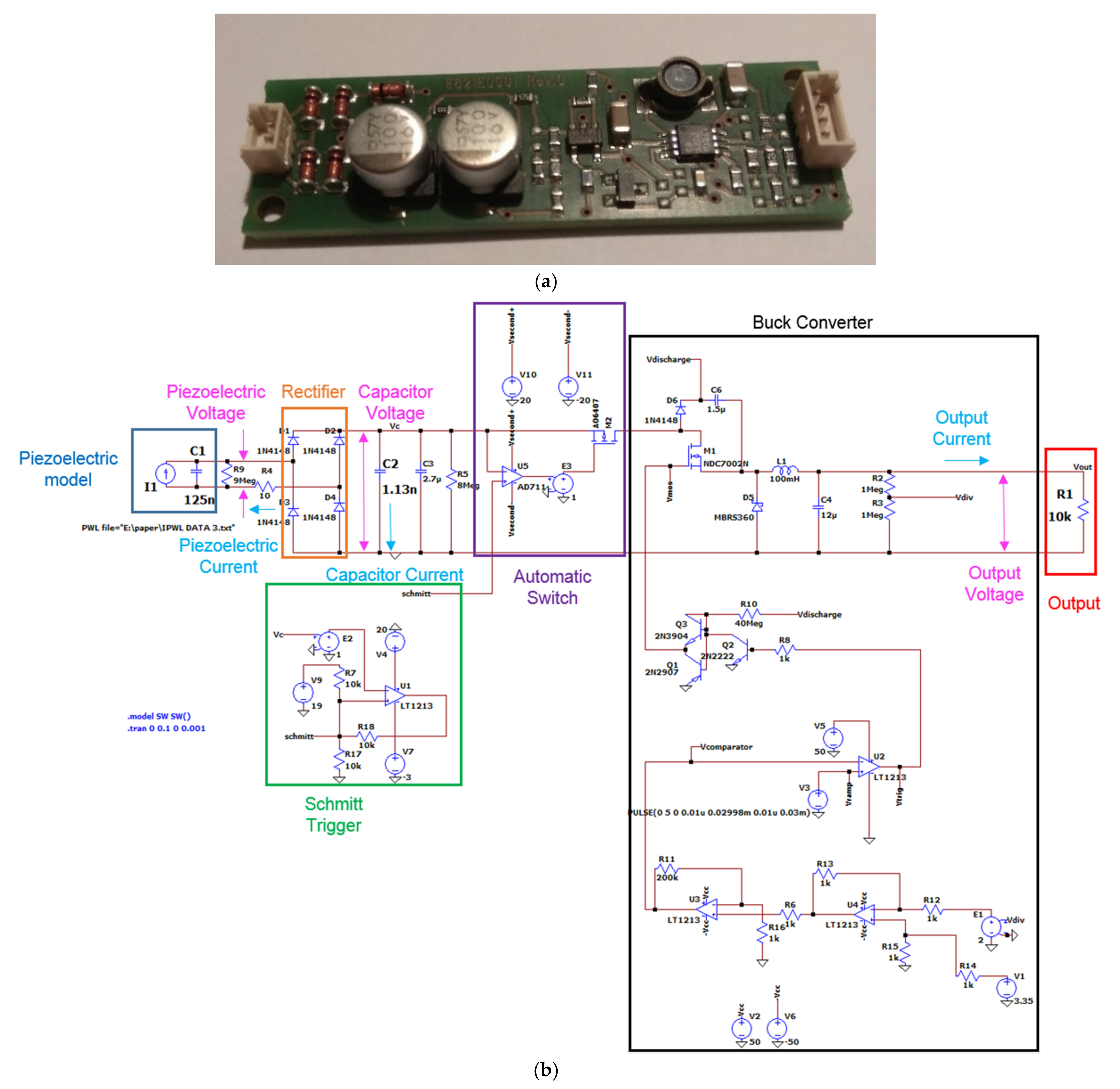
2.3. PEH Circuit
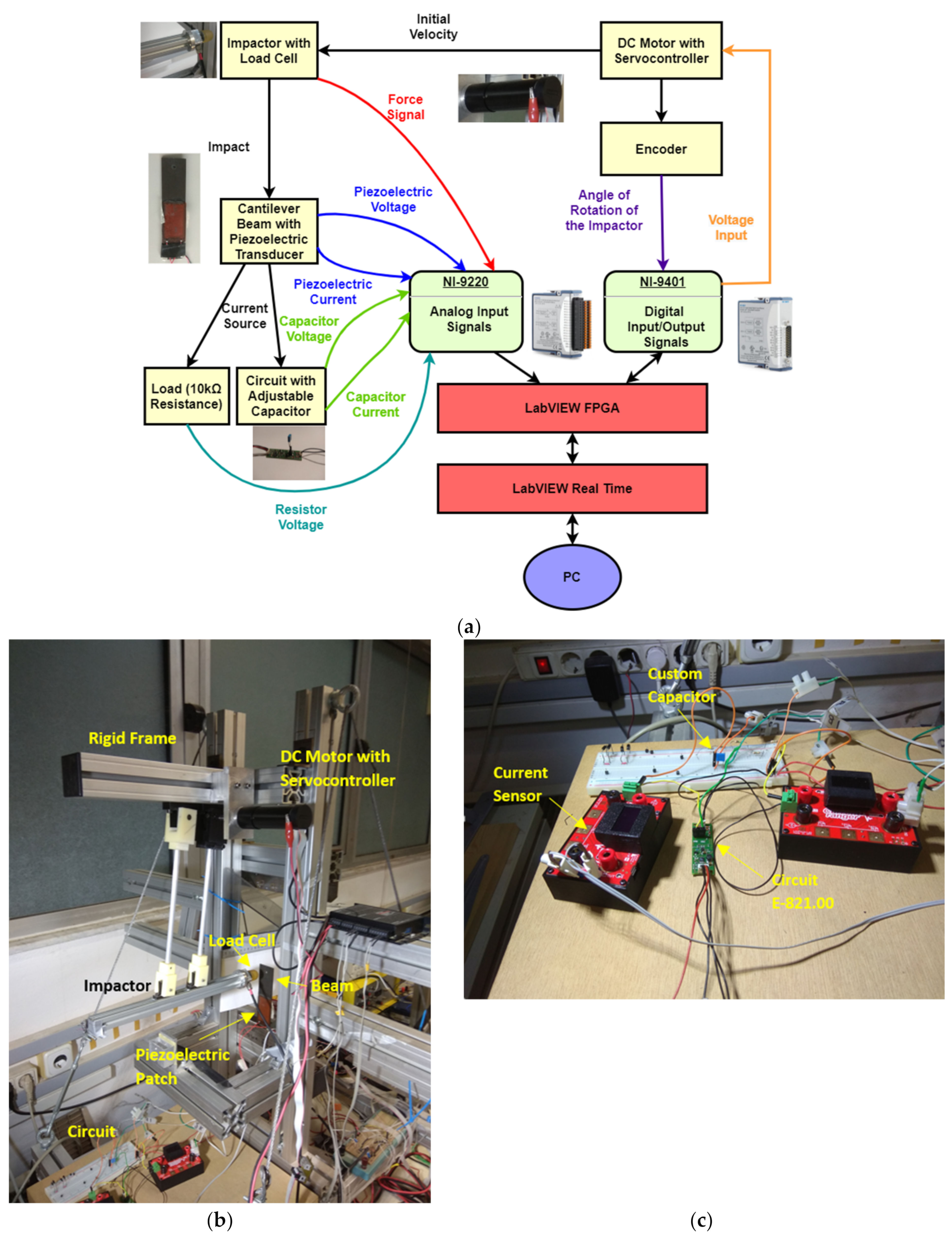
3. Experimental Configuration for Impact Testing
3.1. Custom Impact Frame for Controlled Impact Velocity
3.2. Materials and Specimens
4. Results and Discussion
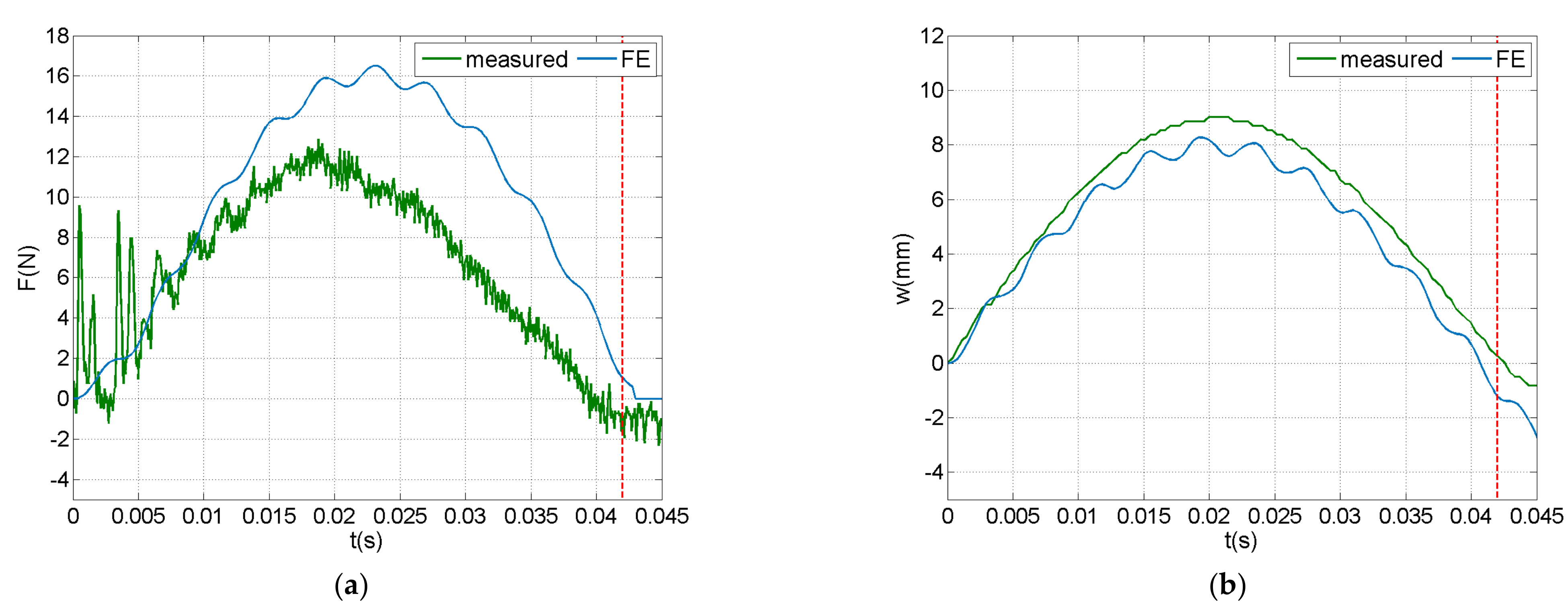
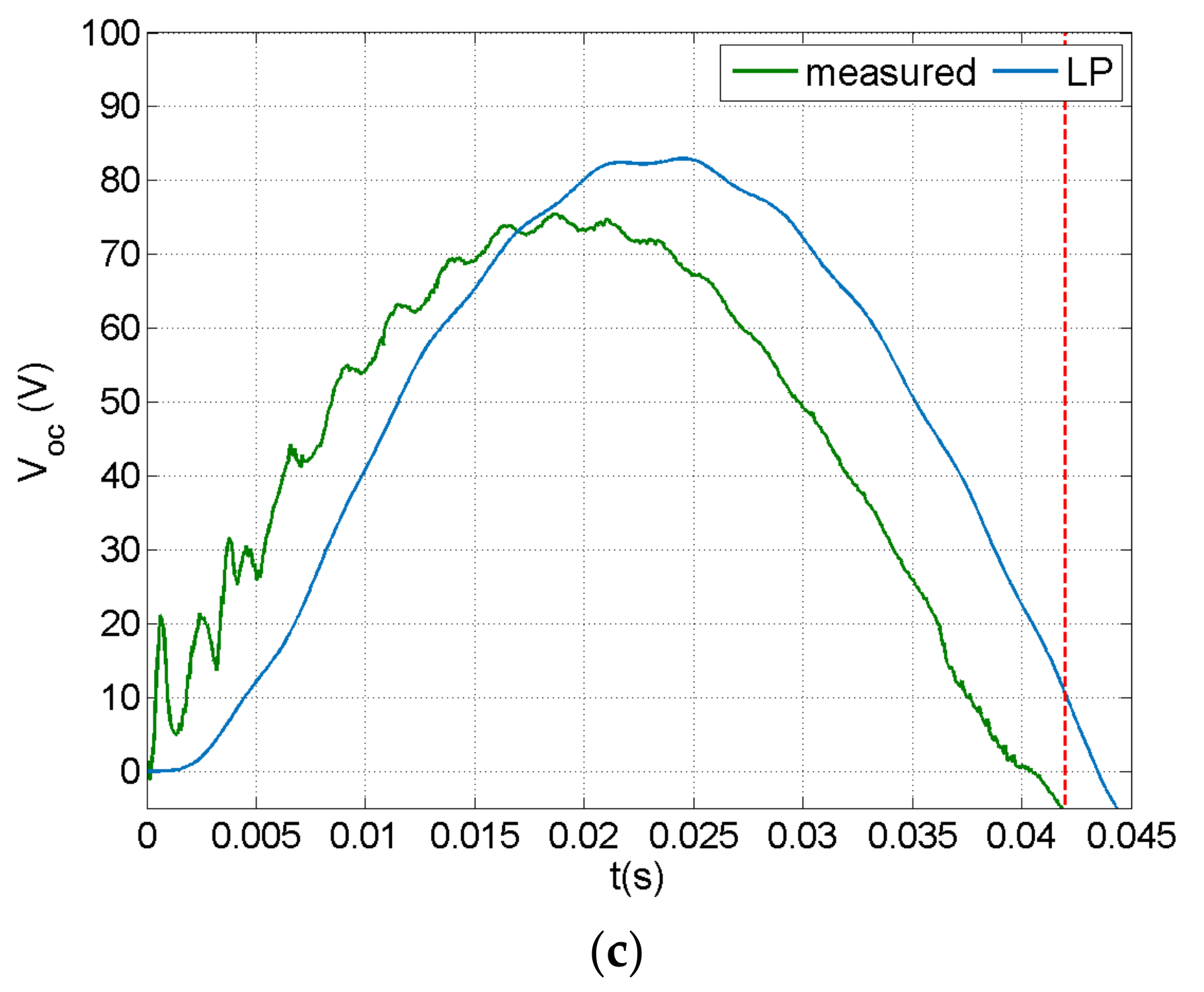
4.1. Open-Circuit Impact Response
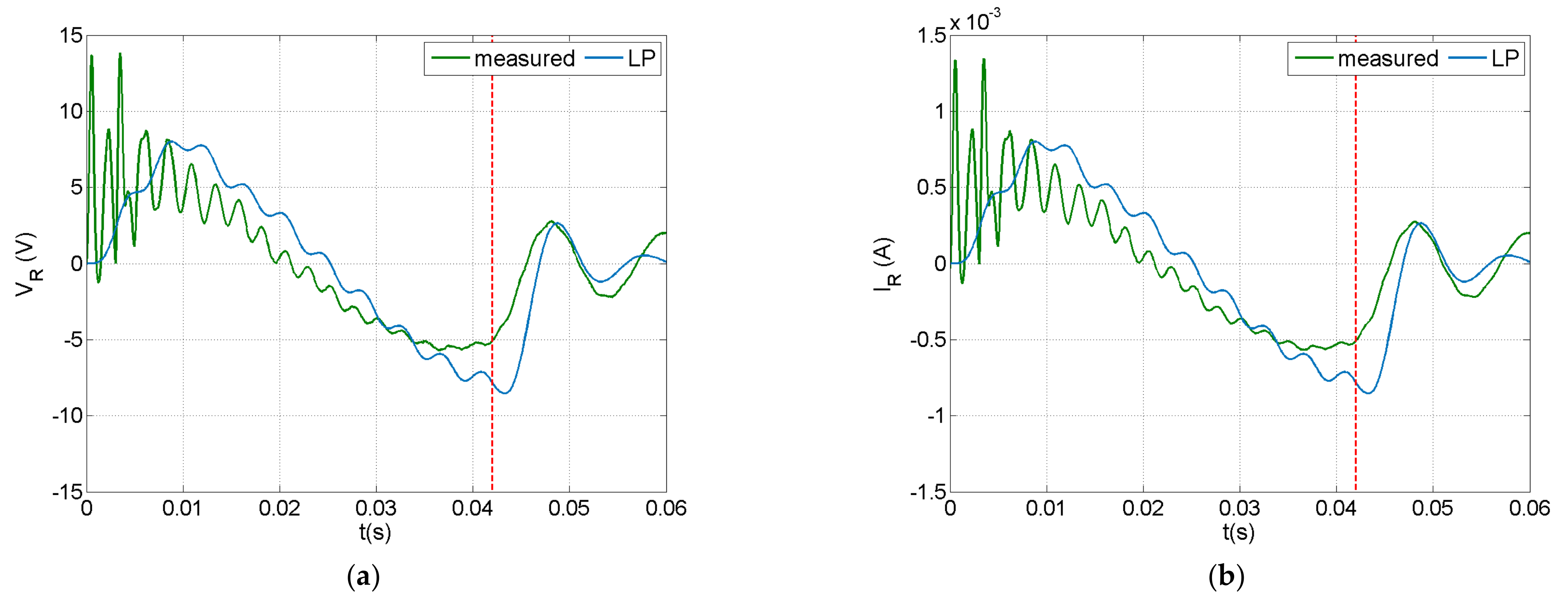
4.2. Closed-Circuit Resistive Impact Response
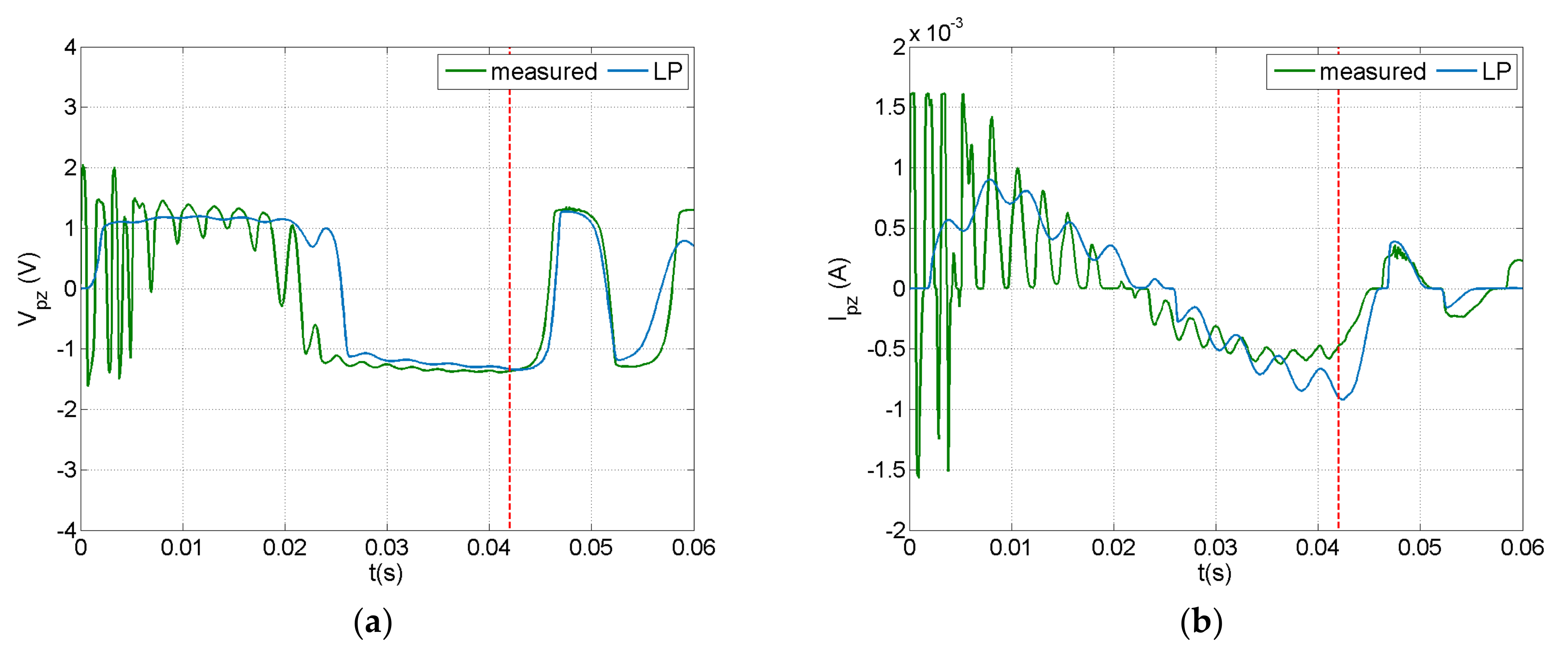
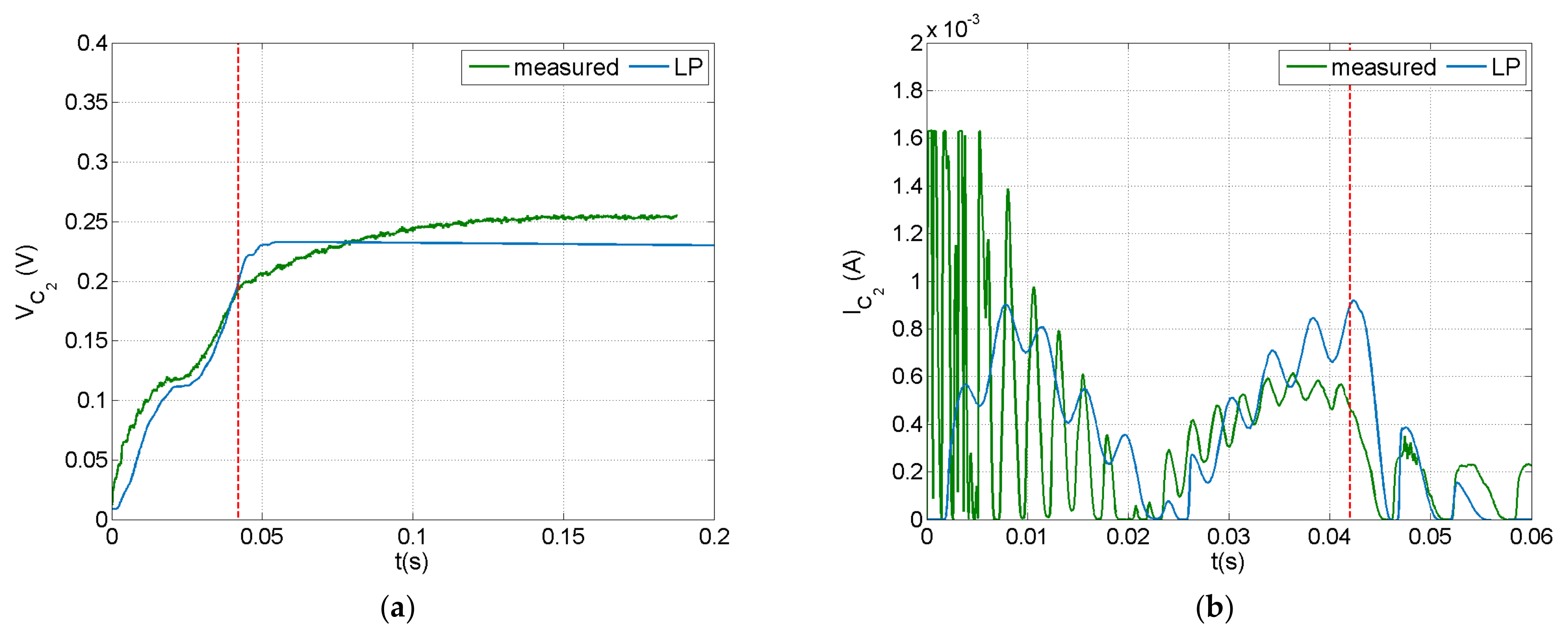
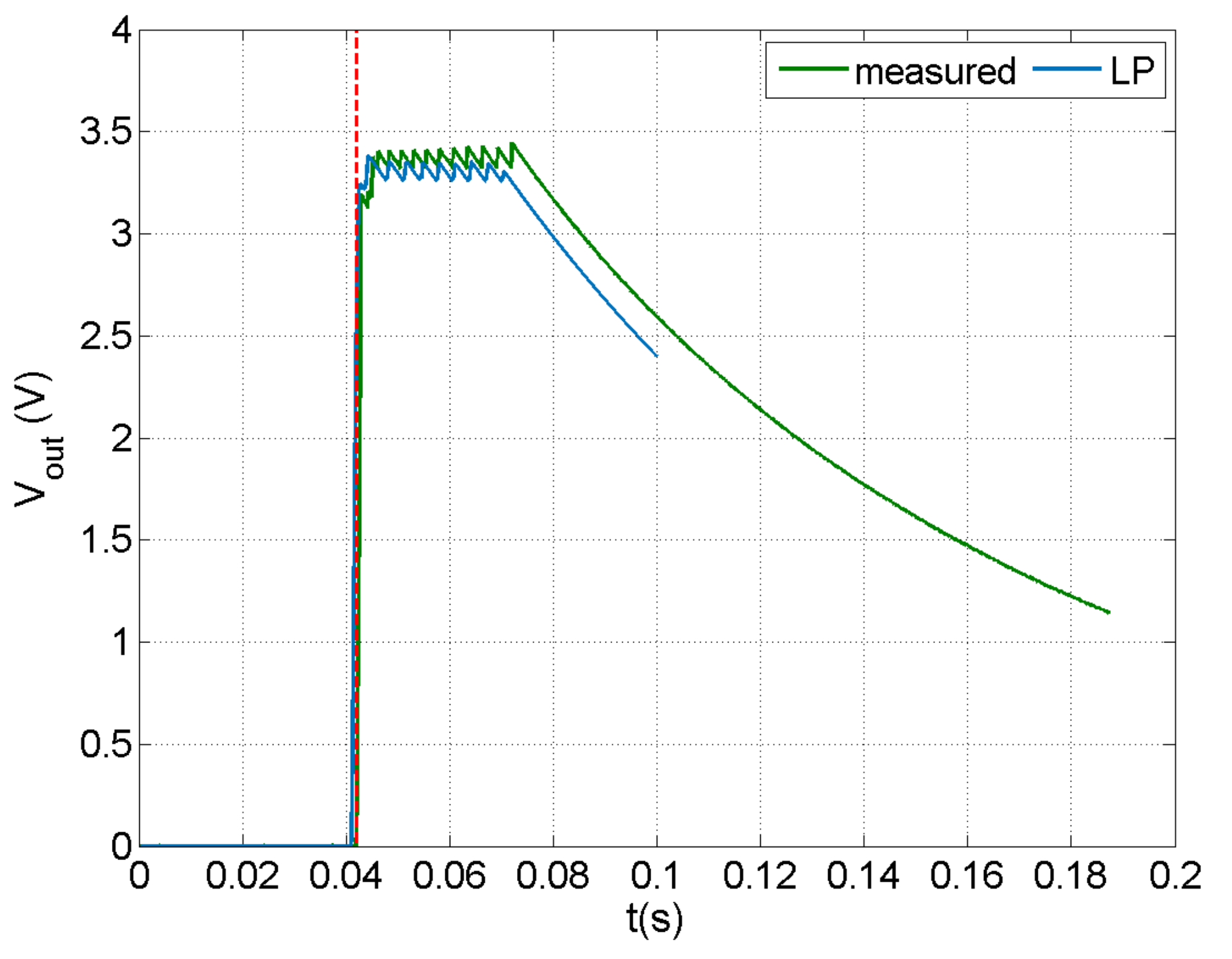
4.3. Closed-Circuit PEH Response
5. Summary and Conclusions
- Predictions of the current methodology compared well with measurements of the electric response of the harvesting circuit, indicating its applicability in the design of PEH systems subjected to impact.
- Deviations between predictions and measurements were observed for the impact force due to the geometric clearance of the force sensor, approximation of impactor–beam contact stiffness and impactor deformability.
- Modification of the commercial PEH circuit in terms of capacity in the charging subcircuit led to harvesting of power in the impact conditions studied experimentally. The design of this modification was possible via the development of a circuit model equivalent to the commercial circuit in LTspice software, and respective verification.
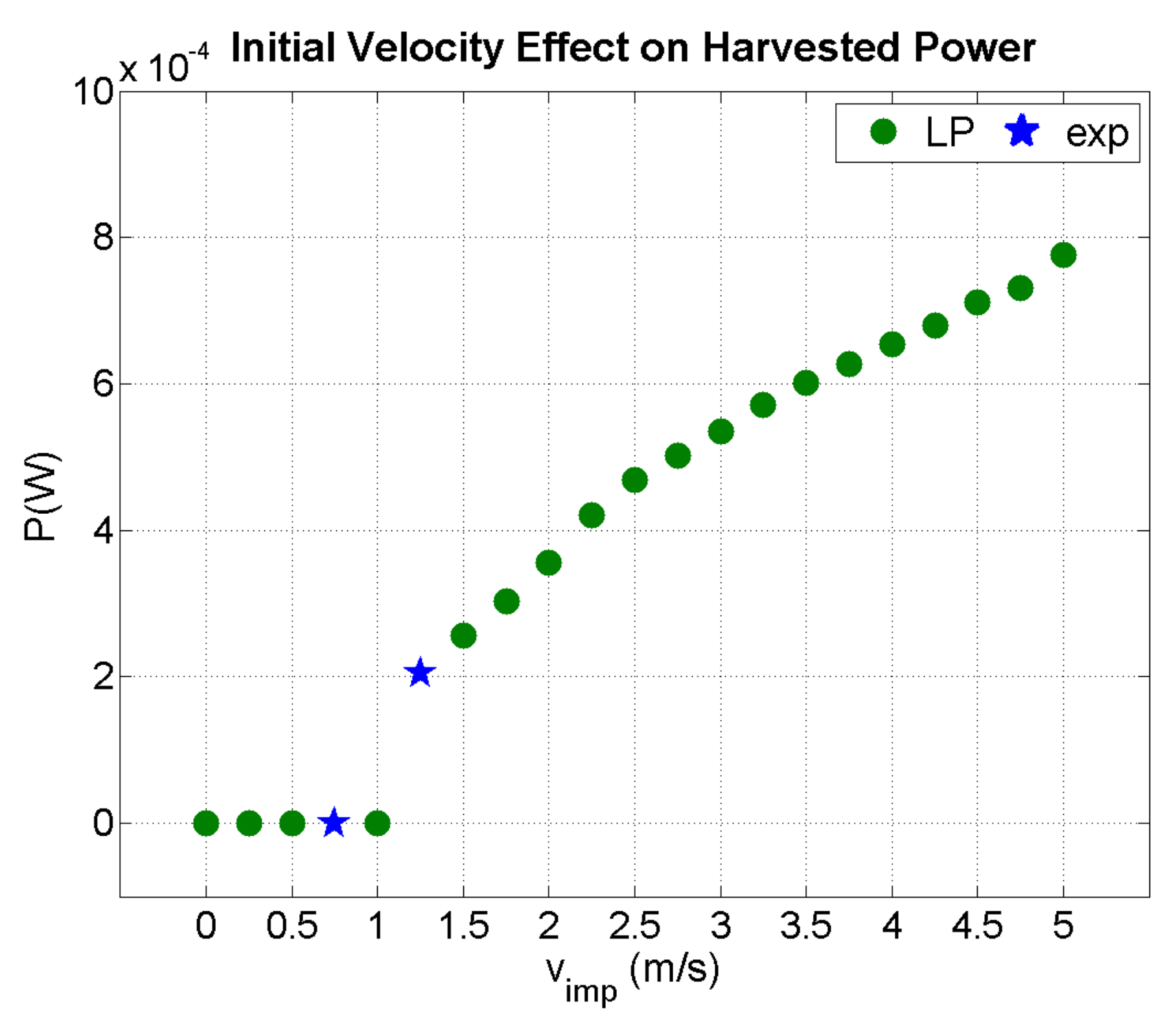
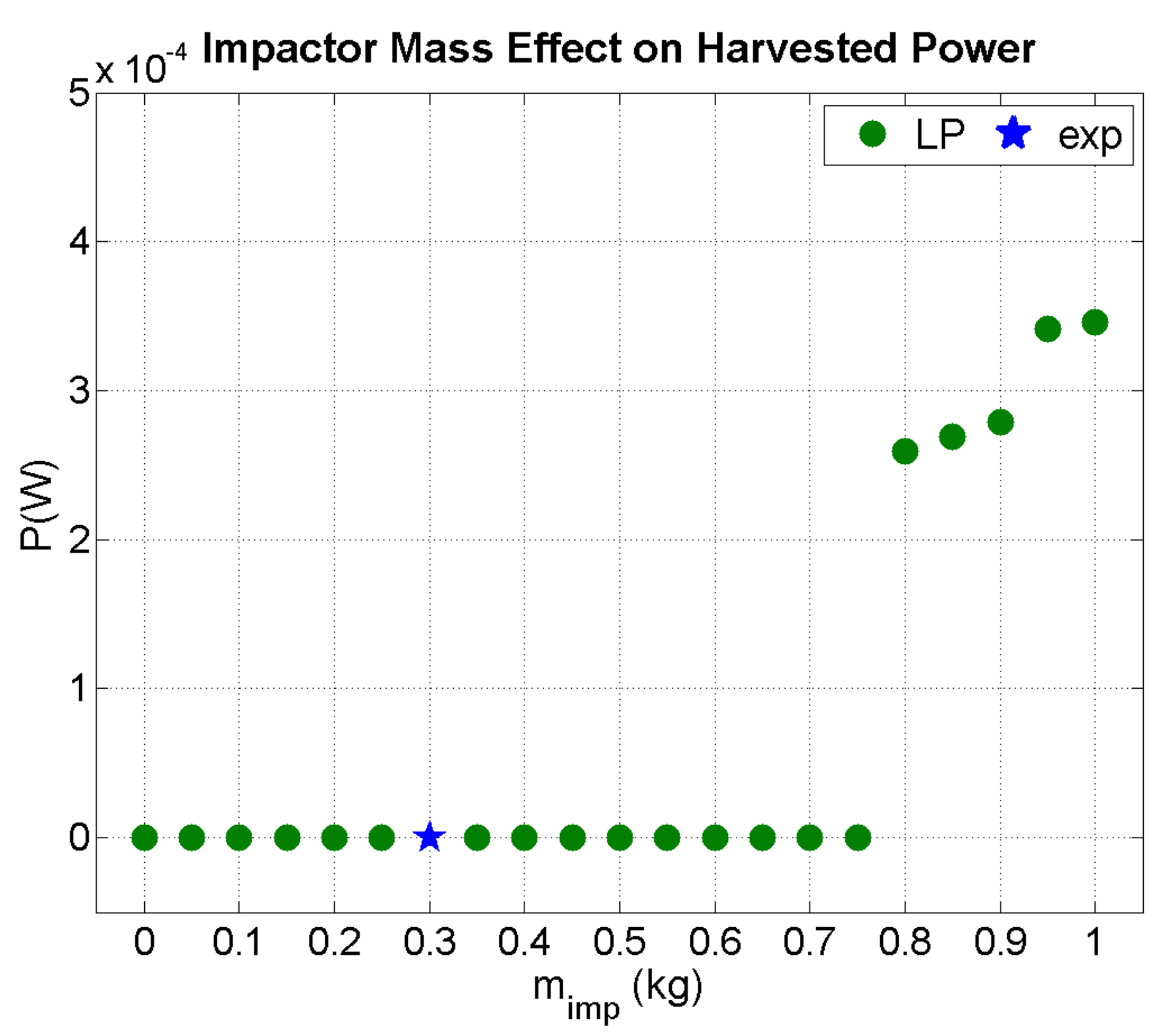
- The harvested power increased with impactor mass and velocity beyond a threshold. Up to that threshold, no electric power produced due to the impact event and subsequent beam vibration could be extracted.
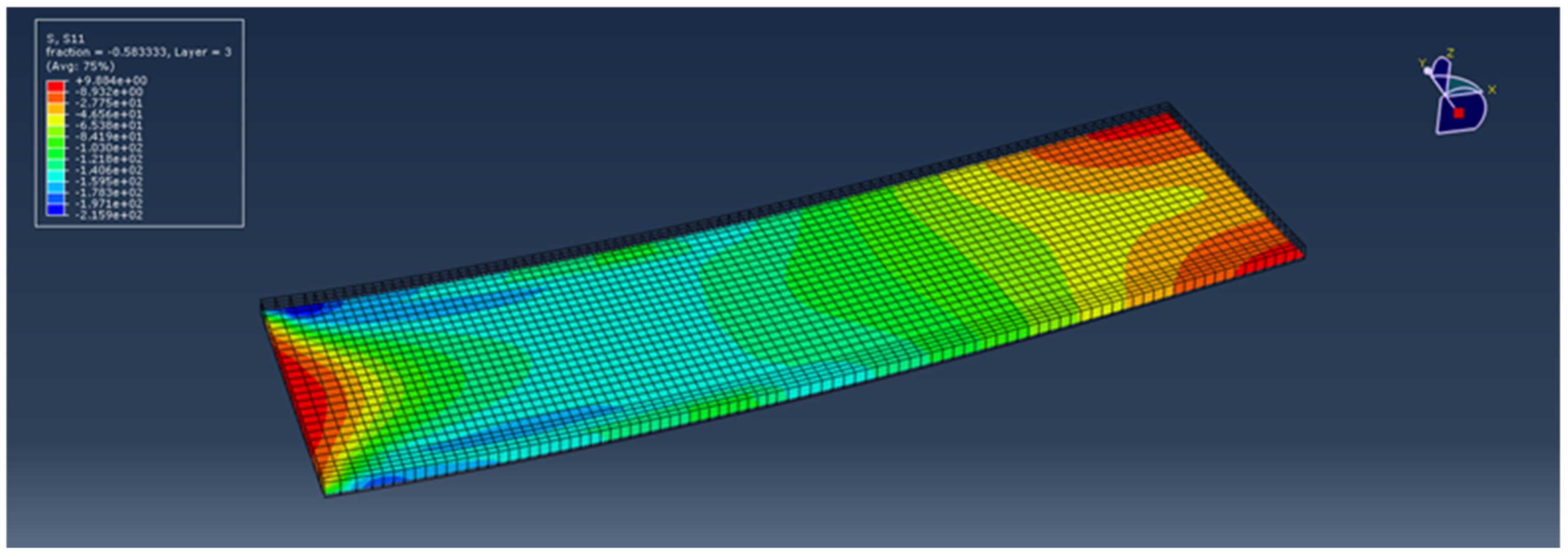
- A major capability of this methodology is the prediction of impact-force–time profile and stress distribution during impact events in composite beams with arbitrary lamination. In this context it can be used for the design of composite impact harvesters with piezoelectric patches, enabling the prediction of harvested power within applicable structural integrity limits.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
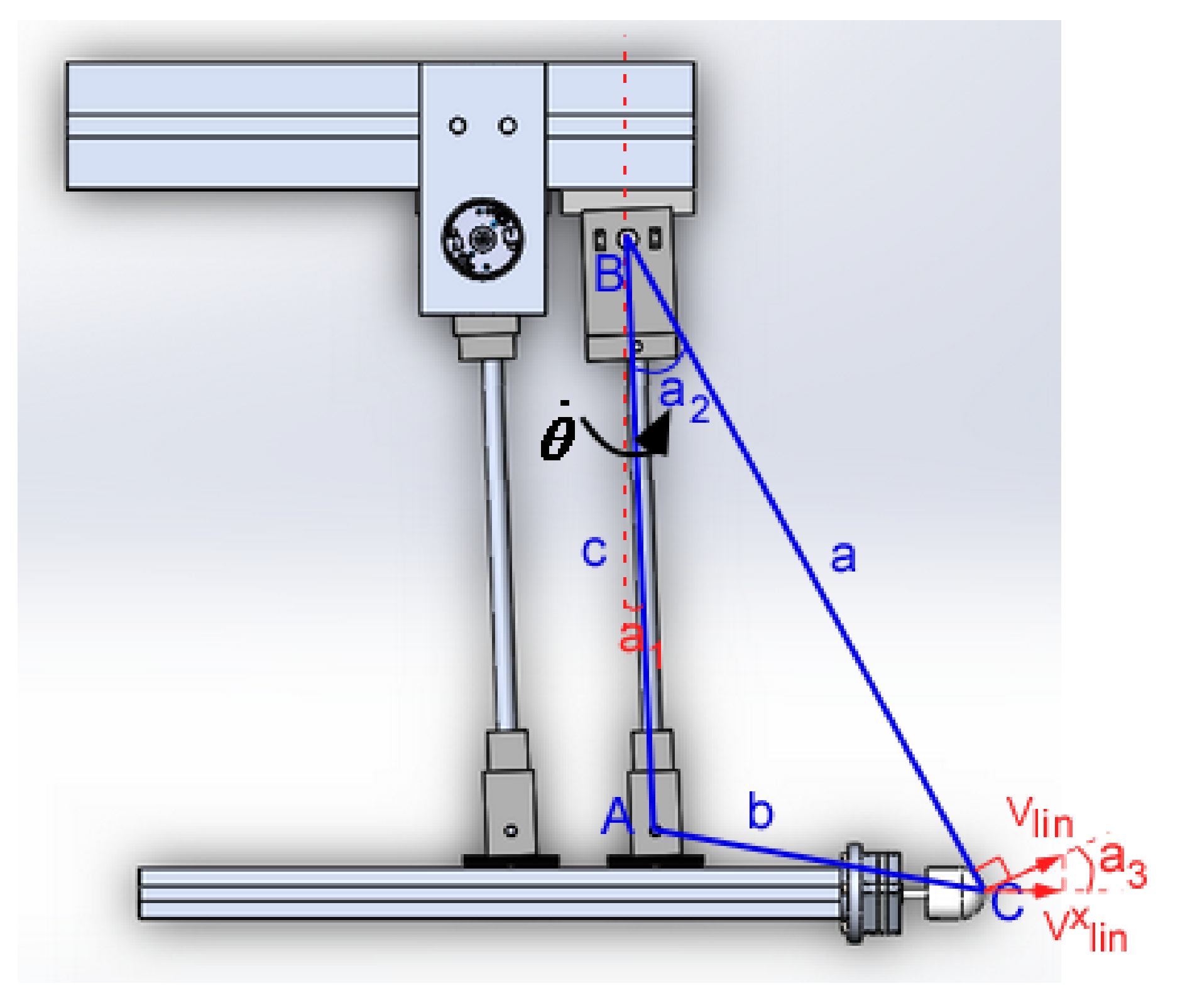
Appendix A.1. Parameters of Impactor Mechanism


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TC (Νm) | b (Nms) | Mtot (kg) | Jm (kgm2) | JL (kgm2) | n | kT (Nm/A) |
|---|---|---|---|---|---|---|
| 0.068 | 0.46 | 0.367 | 3.47E-6 | 0.02 | 28 | 0.054 |
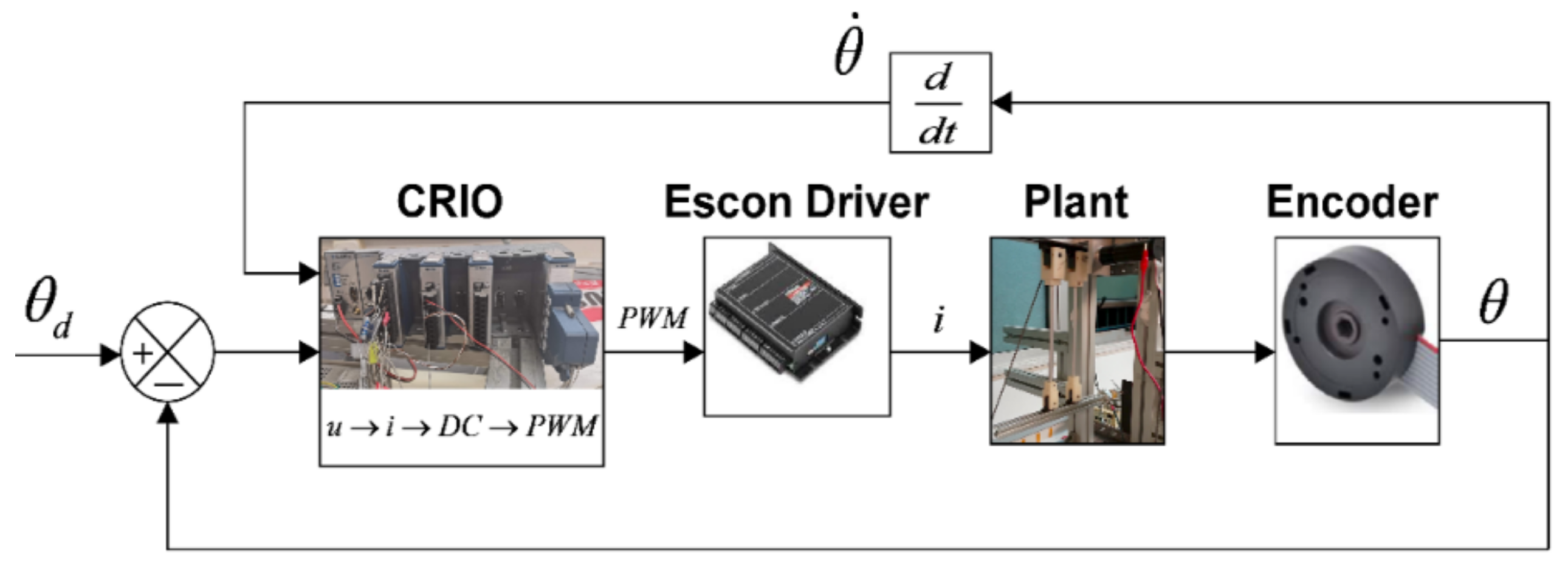
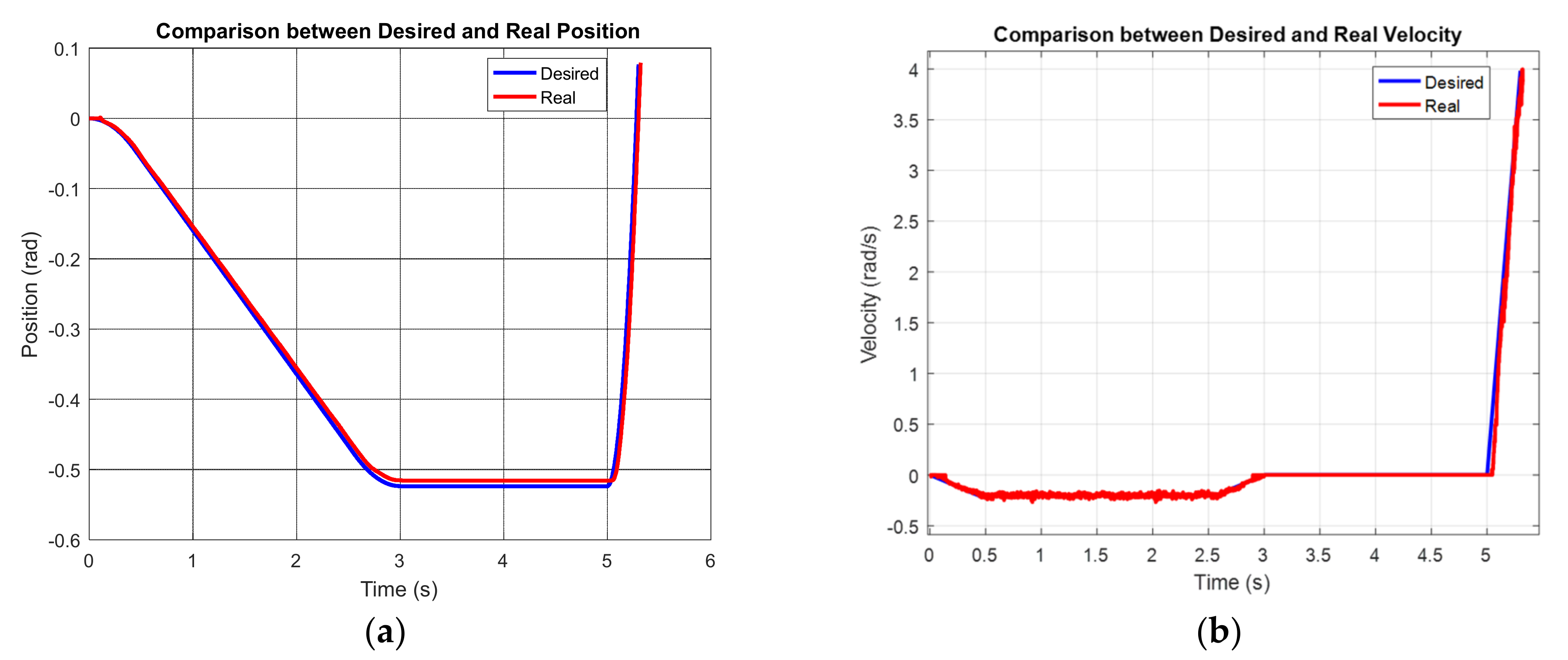
Appendix A.2. Control of Impactor Mechanism

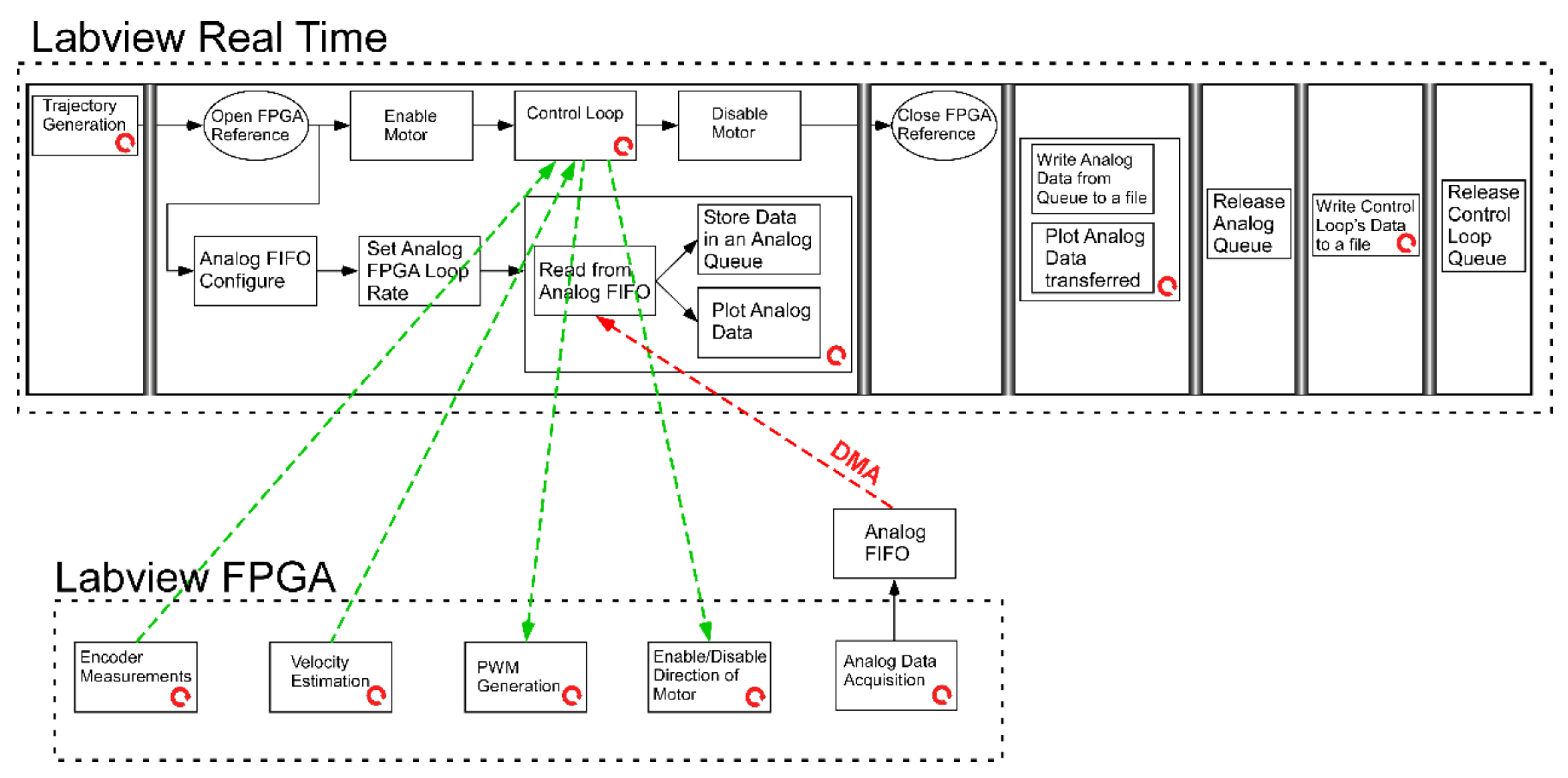
Appendix A.3. Real-Time Implementation of the Control System


| Labview Real-Time Level | |
| Control Loop | fcontrol loop = 1 kHz |
| Labview FPGA Level | |
| Encoder Measurements | fdigital loop = 10 kHz |
| Analog Data Acquisition | fanalog loop = 16 kHz |


References
- Kymissis, J.; Kendall, C.; Paradiso, J.; Gershenfeld, N. Parasitic power harvesting in shoes. In Proceedings of the Digest of Papers Second International Symposium on Wearable Computers (Cat. No.98EX215), Institute of Electrical and Electronics Engineers (IEEE), Pittsburgh, PA, USA, 6 August 2002. [Google Scholar]
- Elvin, N.G.; Elvin, A.; Spector, M. A self-powered mechanical strain energy sensor. Smart Mater. Struct. 2001, 10, 293–299. [Google Scholar] [CrossRef]
- Cook-Chennault, K.; Thambi, N.; Sastry, A.M. Powering MEMS portable devices—A review of non-regenerative and regenerative power supply systems with special emphasis on piezoelectric energy harvesting systems. Smart Mater. Struct. 2008, 17. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.S.; Kim, J.-H.; Kim, J. A review of piezoelectric energy harvesting based on vibration. Int. J. Precis. Eng. Manuf. 2011, 12, 1129–1141. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Yeatman, E.; Rao, G.K.; Holmes, A.S.; Green, T. Energy harvesting from human and machine motion for wireless electronic devices. Proc. IEEE 2008, 96, 1457–1486. [Google Scholar] [CrossRef] [Green Version]
- Safaei, M.; Sodano, H.A.; Anton, S.R. A review of energy harvesting using piezoelectric materials: State-of-the-art a decade later (2008–2018). Smart Mater. Struct. 2019, 28, 113001. [Google Scholar] [CrossRef]
- Roundy, S.; Wright, P.K. A piezoelectric vibration based generator for wireless electronics. Smart Mater. Struct. 2004, 13, 1131–1142. [Google Scholar] [CrossRef] [Green Version]
- Lu, F.; Lee, H.P.; Lim, S.P. Modeling and analysis of micro piezoelectric power generators for micro-electromechanical-systems applications. Smart Mater. Struct. 2003, 13, 57–63. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. Piezoelectric Energy Harvesting; John Wiley and Sons Ltd.: Oxford, UK, 2011. [Google Scholar]
- Erturk, A.; Hoffmann, J.; Inman, D.J. A piezomagnetoelastic structure for broadband vibration energy harvesting. Appl. Phys. Lett. 2009, 94, 254102. [Google Scholar] [CrossRef]
- Wickenheiser, A.M.; García, E. Broadband vibration-based energy harvesting improvement through frequency up-conversion by magnetic excitation. Smart Mater. Struct. 2010, 19, 065020. [Google Scholar] [CrossRef]
- Masana, R.; Daqaq, M.F. Electromechanical modeling and nonlinear analysis of axially loaded energy harvesters. J. Vib. Acoust. 2010, 133, 011007. [Google Scholar] [CrossRef]
- Harne, R.; Wang, K.W. A review of the recent research on vibration energy harvesting via bistable systems. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Jia, Y. Review of nonlinear vibration energy harvesting: Duffing, bistability, parametric, stochastic and others. J. Intell. Mater. Syst. Struct. 2020, 31, 921–944. [Google Scholar] [CrossRef]
- Ottman, G.; Hofmann, H.; Bhatt, A.; Lesieutre, G. Adaptive piezoelectric energy harvesting circuit for wireless remote power supply. IEEE Trans. Power Electron. 2002, 17, 669–676. [Google Scholar] [CrossRef] [Green Version]
- Ottman, G.K.; Hofmann, H.F.; Lesieutre, G. Optimized piezoelectric energy harvesting circuit using step-down converter in discontinuous conduction mode. IEEE Trans. Power Electron. 2003, 18, 696–703. [Google Scholar] [CrossRef]
- Lefeuvre, E.; Badel, A.; Richard, C.; Petit, L.; Guyomar, D. A comparison between several vibration-powered piezoelectric generators for standalone systems. Sens. Actuators A Phys. 2006, 126, 405–416. [Google Scholar] [CrossRef]
- Lefeuvre, E.; Audigier, D.; Richard, C.; Guyomar, D. Buck-boost converter for sensorless power optimization of piezoelectric energy harvester. IEEE Trans. Power Electron. 2007, 22, 2018–2025. [Google Scholar] [CrossRef]
- Shen, H.; Qiu, J.; Ji, H.; Zhu, K.; Balsi, M. Enhanced synchronized switch harvesting: A new energy harvesting scheme for efficient energy extraction. Smart Mater. Struct. 2010, 19, 115017. [Google Scholar] [CrossRef]
- Ramadass, Y.K.; Chandrakasan, A.P. An efficient piezoelectric energy harvesting interface circuit using a bias-flip rectifier and shared inductor. IEEE J. Solid State Circuits 2010, 45, 189–204. [Google Scholar] [CrossRef] [Green Version]
- Tabesh, A.; Fréchette, L.G. A low-power stand-alone adaptive circuit for harvesting energy from a piezoelectric micropower generator. IEEE Trans. Ind. Electron. 2010, 57, 840–849. [Google Scholar] [CrossRef] [Green Version]
- Liang, J.; Liao, W.-H. Impedance modeling and analysis for piezoelectric energy harvesting systems. IEEE ASME Trans. Mechatron. 2011, 17, 1145–1157. [Google Scholar] [CrossRef]
- Huguet, T.; Lallart, M.; Badel, A. Bistable vibration energy harvester and SECE circuit: Exploring their mutual influence. Nonlinear Dyn. 2019, 97, 485–501. [Google Scholar] [CrossRef]
- Guyomar, D.; Lallart, M. Recent progress in piezoelectric conversion and energy harvesting using nonlinear electronic interfaces and issues in small scale implementation. Micromachines 2011, 2, 274–294. [Google Scholar] [CrossRef] [Green Version]
- Caliò, R.; Rongala, U.B.; Camboni, D.; Milazzo, M.; Stefanini, C.; De Petris, G.; Oddo, C.M. Piezoelectric energy harvesting solutions. Sensors 2014, 14, 4755–4790. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Linear Technology Corporation. Piezoelectric Energy Harvesting Power Supply; LTC-3588; Linear Technology Corporation: Norwood, MA, USA, 2010. [Google Scholar]
- PI Motion/Positioning. E-821 Electronic Module for Energy Harvesting Using Piezo Actuators for Energy Generation. 2014. Available online: https://www.physikinstrumente.com/en/products/controllers-and-drivers/piezo-drivers-for-open-loop-operation-of-piezo-actuators/e-821-electronic-module-for-energy-harvesting-608000/ (accessed on 28 September 2021).
- Plagianakos, T.S.; Papadopoulos, E.G. Low-energy impact response of composite and sandwich composite plates with piezoelectric sensory layers. Int. J. Solids Struct. 2014, 51, 2713–2727. [Google Scholar] [CrossRef] [Green Version]
- Umeda, M.; Nakamura, K.; Ueha, S. Analysis of the transformation of mechanical impact energy to electric energy using piezoelectric vibrator. Jpn. J. Appl. Phys. 1996, 35, 3267. [Google Scholar] [CrossRef]
- Pozzi, M.; Zhu, M. Plucked piezoelectric bimorphs for knee-joint energy harvesting: Modelling and experimental validation. Smart Mater. Struct. 2011, 20, 055007. [Google Scholar] [CrossRef] [Green Version]
- Renaud, M.; Fiorini, P.; van Schaijk, R.; van Hoof, C. Harvesting energy from the motion of human limbs: The design and analysis of an impact-based piezoelectric generator. Smart Mater. Struct. 2009, 18, 35001. [Google Scholar] [CrossRef]
- Lee, E.H. The impact of a mass striking a beam. J. Appl. Mech. 1940, 7, A129–A138. [Google Scholar] [CrossRef]
- Gu, L.; Livermore, C. Impact-driven, frequency up-converting coupled vibration energy harvesting device for low frequency operation. Smart Mater. Struct. 2011, 20, 045004. [Google Scholar] [CrossRef]
- Basari, A.A.; Awaji, S.; Sakamoto, S.; Hashimoto, S.; Homma, B.; Suto, K.; Okada, H.; Okuno, H.; Kobayashi, K.; Kumagai, S. Evaluation on mechanical impact parameters in piezoelectric power generation. In Proceedings of the 10th Asian Control Conference (ASCC), Sabah, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Doria, A.; Medè, C.; Desideri, D.; Maschio, A.; Codecasa, L.; Moro, F. On the performance of piezoelectric harvesters loaded by finite width impulses. Mech. Syst. Signal. Process. 2018, 100, 28–42. [Google Scholar] [CrossRef]
- Jacquelin, E.; Adhikari, S.; Friswell, M. A piezoelectric device for impact energy harvesting. Smart Mater. Struct. 2011, 20, 105008. [Google Scholar] [CrossRef]
- Martinez-Ayuso, G.; Friswell, M.I.; Adhikari, S.; Khodaparast, H.H.; Featherston, C.A. Energy harvesting using porous piezoelectric beam with impacts. Procedia Eng. 2017, 199, 3468–3473. [Google Scholar] [CrossRef] [Green Version]
- Hunt, K.; Crossley, F.R.E. Coefficient of restitution interpreted as damping in vibroimpact. J. Appl. Mech. 1975, 42, 440–445. [Google Scholar] [CrossRef]
- Fu, X.; Liao, W.-H. A dimensionless model of impact piezoelectric energy harvesting with dissipation. Act. Passiv. Smart Struct. Integr. Syst. 2016, 9799, 97991. [Google Scholar] [CrossRef]
- Ferrari, M.; Cerini, F.; Ferrari, V. Autonomous sensor module powered by impact-enhanced energy harvester from broadband low-frequency vibrations. In Proceedings of the Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems, Barcelona, Spain, 16–20 June 2013; pp. 2249–2252. [Google Scholar] [CrossRef]
- Wong, C.H.; Dahari, Z. Development of vibration-based piezoelectric raindrop energy harvesting system. J. Electron. Mater. 2017, 46, 1869–1882. [Google Scholar] [CrossRef]
- Feng, T.; Aono, K.; Covassin, T.; Chakrabartty, S. Self-powered monitoring of repeated head impacts using time-dilation energy measurement circuit. IEEE Trans. Biomed. Circuits Syst. 2015, 9, 217–226. [Google Scholar] [CrossRef] [PubMed]
- Chen, N.; Jung, H.; Jabbar, H.; Sung, T.H.; Wei, T. A piezoelectric impact-induced vibration cantilever energy harvester from speed bump with a low-power power management circuit. Sens. Actuators A Phys. 2017, 254, 134–144. [Google Scholar] [CrossRef]
- Dassault Systems. Abaqus/CAE User’s Guide, Version 6.14; Dassault Systems: Vienna, Austria, 2014. [Google Scholar]
- Available online: https://www.analog.com/en/analog-dialogue/articles/get-up-and-running-with-ltspice.html (accessed on 23 September 2021).
- Tiersten, H.F. Linear Piezoelectric Plate Vibrations; Springer Science: New York, NY, USA, 1969. [Google Scholar]
- Plagianakos, T.S.; Saravanos, D.A. High-order layerwise finite element for the damped free-vibration response of thick composite and sandwich composite plates. Int. J. Numer. Methods Eng. 2009, 77, 1593–1626. [Google Scholar] [CrossRef]
- Yigit, A.; Christoforou, A. Impact dynamics of composite beams. Compos. Struct. 1995, 32, 187–195. [Google Scholar] [CrossRef]
- Skrinjar, L.; Slavič, J.; Boltežar, M. A review of continuous contact-force models in multibody dynamics. Int. J. Mech. Sci. 2018, 145, 171–187. [Google Scholar] [CrossRef]
- Yigit, A.S.; Christoforou, A.P.; Majeed, M.A. A nonlinear visco-elastoplastic impact model and the coefficient of restitution. Nonlinear Dyn. 2011, 66, 509–521. [Google Scholar] [CrossRef]
- Siorikis, D.; Rekatsinas, C.; Christoforou, A.; Saravanos, D. Experimental and numerical investigation of contact laws for the rapid simulation of low-energy impacts on laminated composite plates. Compos. Struct. 2017, 168, 646–656. [Google Scholar] [CrossRef]
- Walgrave, S.C.; Ehlbeck, J.M. Understanding modal analysis. SAE Tech. Pap. Ser. 1978, 87. [Google Scholar] [CrossRef]
- Plagianakos, T.; Lika, K.; Papadopoulos, E.G. Low-velocity impact response of smart sandwich composite plates with piezoelectric transducers: Modeling and experiments. J. Intell. Mater. Syst. Struct. 2016, 27, 774–785. [Google Scholar] [CrossRef]
- Maxon Motor. ESCON Module 50/5 Servo Controller-Hardware Reference; Maxon Motor: Sachseln, Switzerland, 2014. [Google Scholar]
- Available online: https://www.botasys.com/ (accessed on 9 October 2020).
- Nise, N.S. Control System Engineering, 9th ed.; John Wiley & Sons: Oxford, UK, 2019. [Google Scholar]
- Available online: https://www.ni.com/en-us/support/model.crio-9074.html (accessed on 18 September 2021).
- National Instruments Co. LabVIEW FPGA Course Manual; National Instruments Co.: Austin, TX, USA, 2009. [Google Scholar]
- Karydis-Karandreas, P. Modeling and Control of an Impact Pendulum for Impact Testing of Plates with Pi-Ezoelectric Transducers. Master’s Thesis, National Technical University of Athens, Athens, Greece, 2019. [Google Scholar]
- Christoforou, A.P.; Yigit, A. Characterization of impact in composite plates. Compos. Struct. 1998, 43, 15–24. [Google Scholar] [CrossRef]
- Komitopoulos, S. Active Vibration Control of Composite Beams Using Piezoelectric Transducers and Real-Time Software. Master’s Thesis, National Technical University of Athens, Athens, Greece, 2021. [Google Scholar]
- Available online: https://www.piceramic.com/en/ (accessed on 27 September 2020).
- Karachalios, E.; Muñoz, K.; Jimenez, M.; Prentzias, V.; Goossens, S.; Geernaert, T.; Plagianakos, T.S. LRI-fabricated composite demonstrators for an aircraft fuselage on the basis of a Building Block design approach. Compos. Part. C Open Access 2021, 6, 100178. [Google Scholar] [CrossRef]
- Plagianakos, T.S.; Margelis, N.; Leventakis, N.; Bolanakis, G.; Vartholomeos, P.; Papadopoulos, E.G. Finite element-based assessment of energy harvesting in composite beams with piezoelectric transducers. Proc. Inst. Mech. Eng. Part. L J. Mater. Des. Appl. 2021. [Google Scholar] [CrossRef]















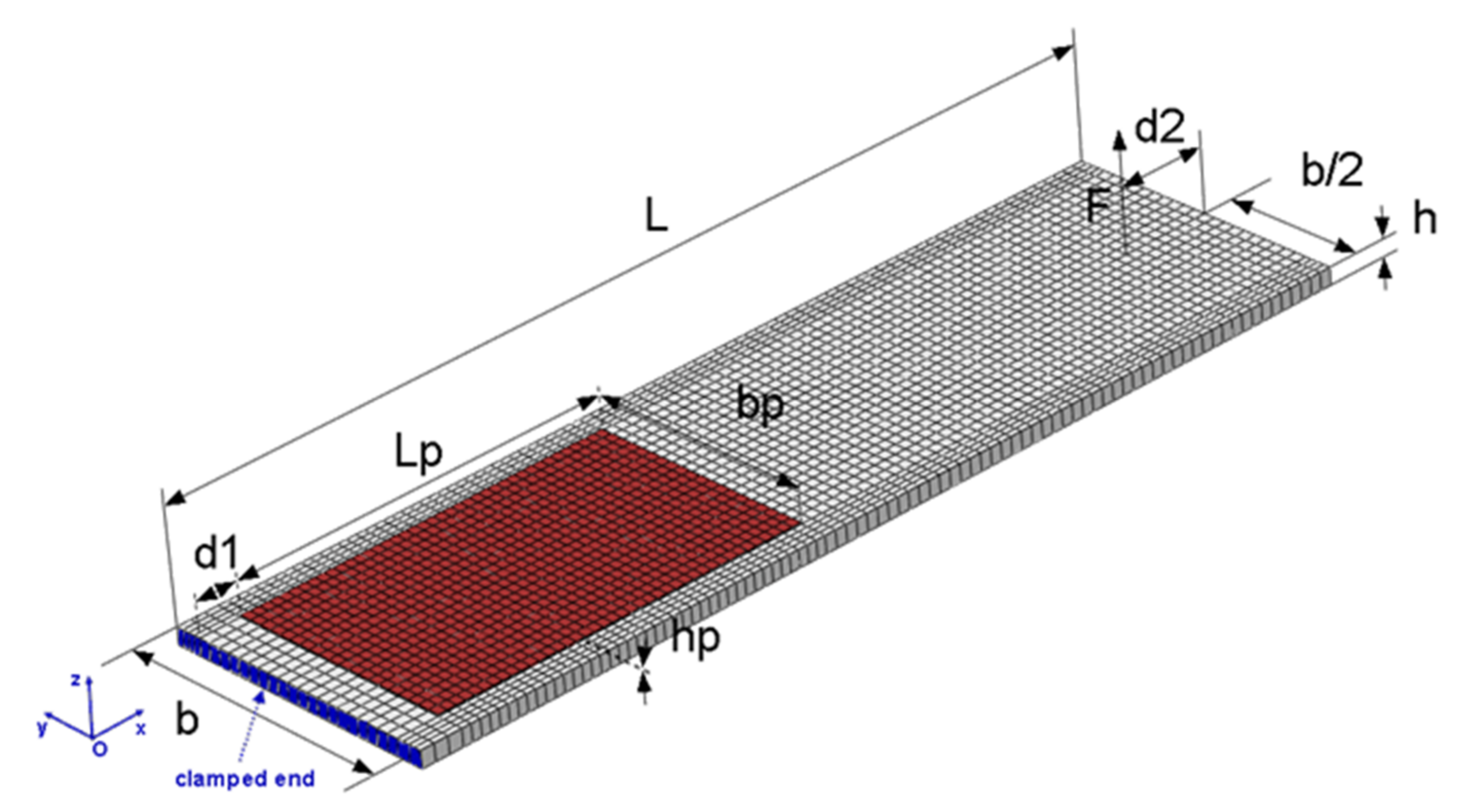
| Parameter | Value (mm) | Parameter | Value (mm) |
|---|---|---|---|
| Beam length L | 128 | PE patch length Lp | 50 |
| Beam width b | 37 | PE patch width bp | 30 |
| Beam thickness h | 2.15 | PE patch thickness hp | 0.2 |
| Distance from support d1 | 5.5 | Distance from free end d2 | 10 |
| Property | Composite Material | Piezoelectric Material |
|---|---|---|
| Density (kg/m3) | 1554 | 7800 |
| Elastic Properties | ||
| E11 (GPa) | 138.40 | 62.10 |
| E22 (GPa) | 8.50 | 62.10 |
| E33 (GPa) | 8.50 | 48.30 |
| G12 (GPa) | 4.30 | 23.20 |
| G13 (GPa) | 4.30 | 21.30 |
| G23 (GPa) | 4.30 | 21.30 |
| ν12 | 0.31 | 0.33 |
| ν13 | 0.31 | 0.43 |
| ν23 | 0.31 | 0.43 |
| Piezoelectric Properties | ||
| d31 (10−12 m/V) | - | −191 |
| d32 (10−12 m/V) | - | −191 |
| d33 (10−12 m/V) | - | 409 |
| Dielectric Properties (ε0 = 8.85 × 10−12 F/m) | ||
| ε33/ε0 | 3.5 | 1832 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Margelis, N.; Plagianakos, T.S.; Karydis-Karandreas, P.; Papadopoulos, E.G. Assessment of Impact Energy Harvesting in Composite Beams with Piezoelectric Transducers. Sensors 2021, 21, 7445. https://doi.org/10.3390/s21227445
Margelis N, Plagianakos TS, Karydis-Karandreas P, Papadopoulos EG. Assessment of Impact Energy Harvesting in Composite Beams with Piezoelectric Transducers. Sensors. 2021; 21(22):7445. https://doi.org/10.3390/s21227445
Chicago/Turabian StyleMargelis, Nikolaos, Theofanis S. Plagianakos, Panagiotis Karydis-Karandreas, and Evangelos G. Papadopoulos. 2021. "Assessment of Impact Energy Harvesting in Composite Beams with Piezoelectric Transducers" Sensors 21, no. 22: 7445. https://doi.org/10.3390/s21227445