
A Medium-Frequency Fiber Bragg Grating Accelerometer Based on Flexible Hinges

Abstract
:1. Introduction
2. Materials and Methods
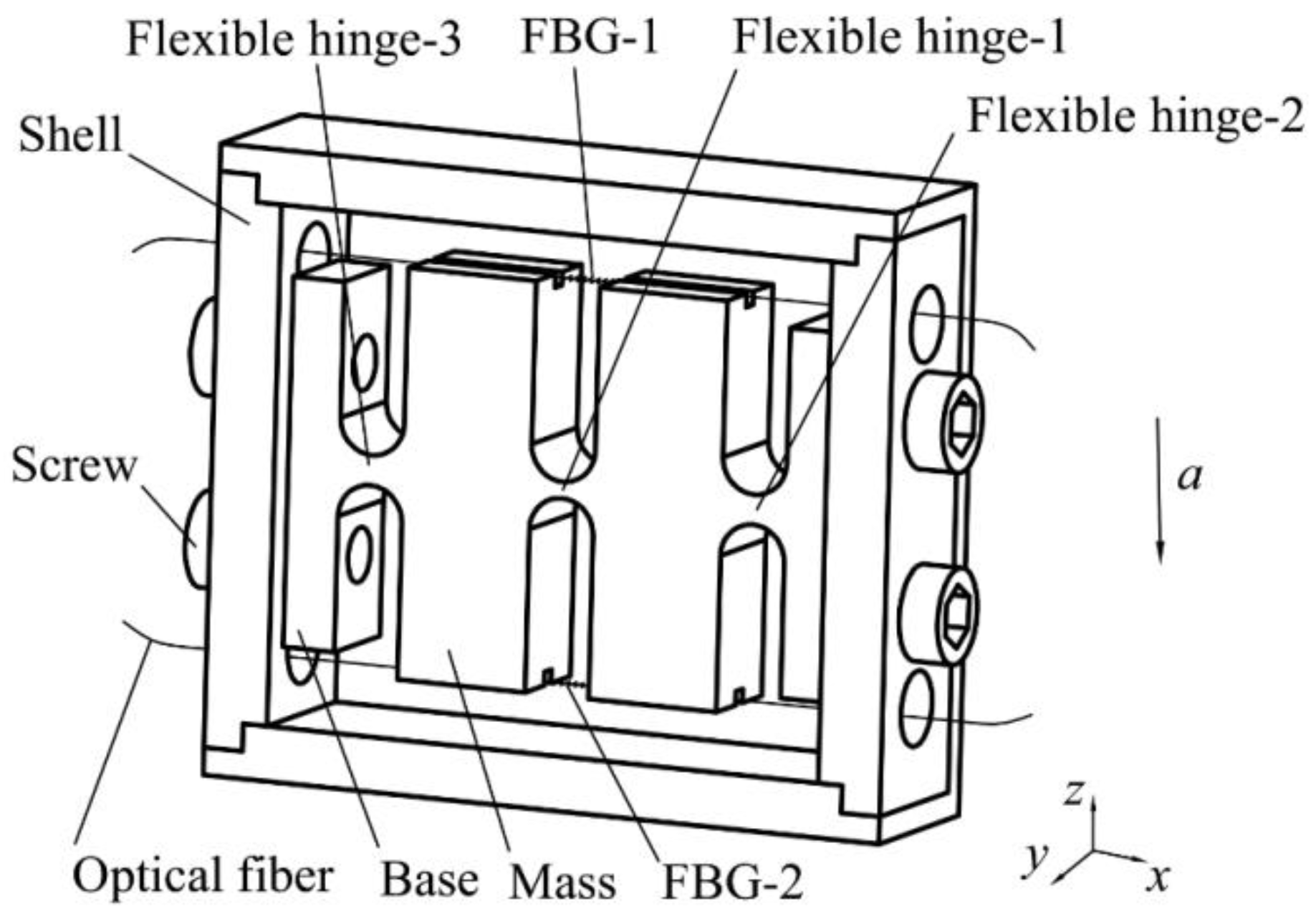
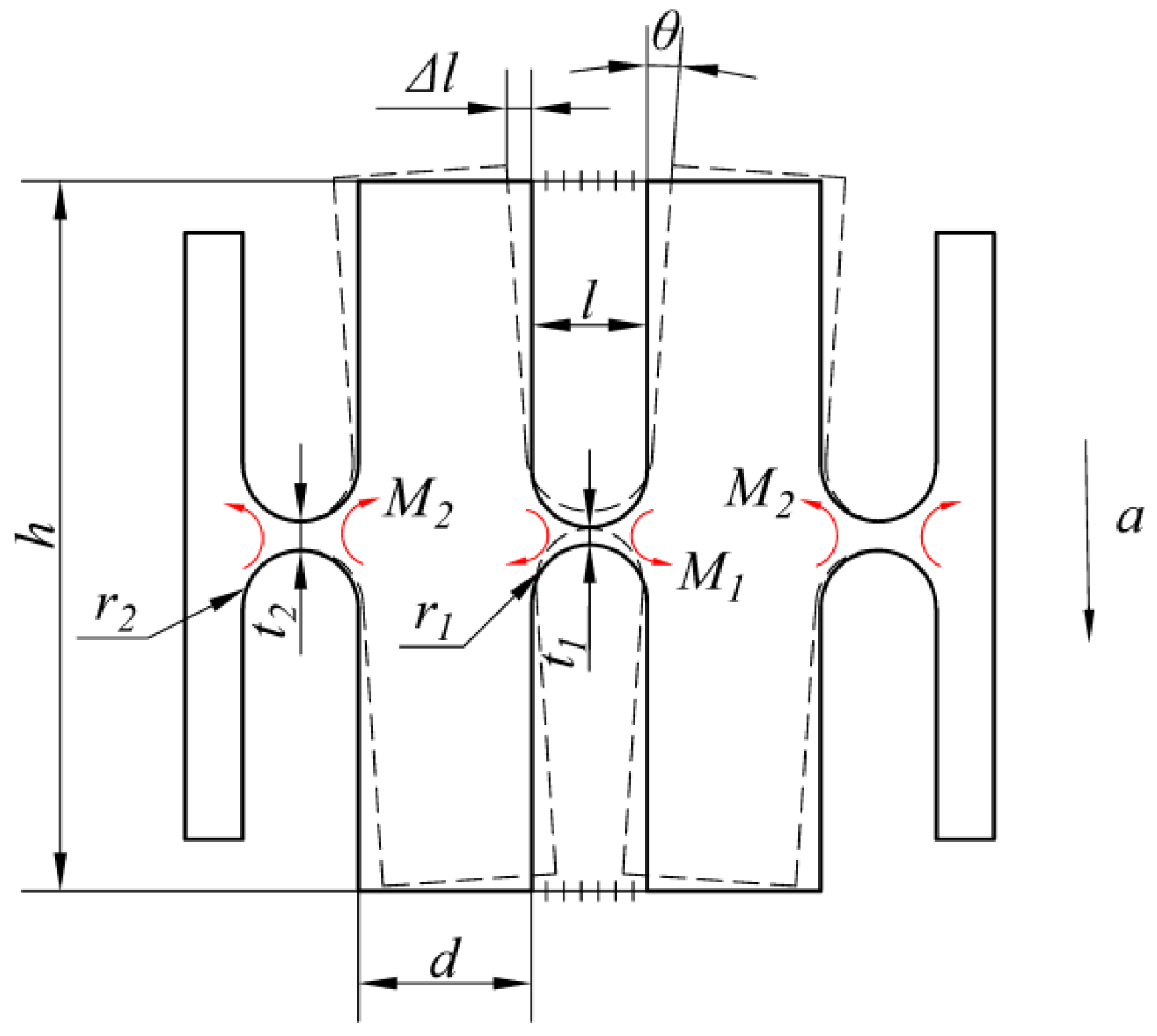
2.1. Structure Model and Principle of the Sensor
2.2. Sensitivity
2.3. Resonance Frequency
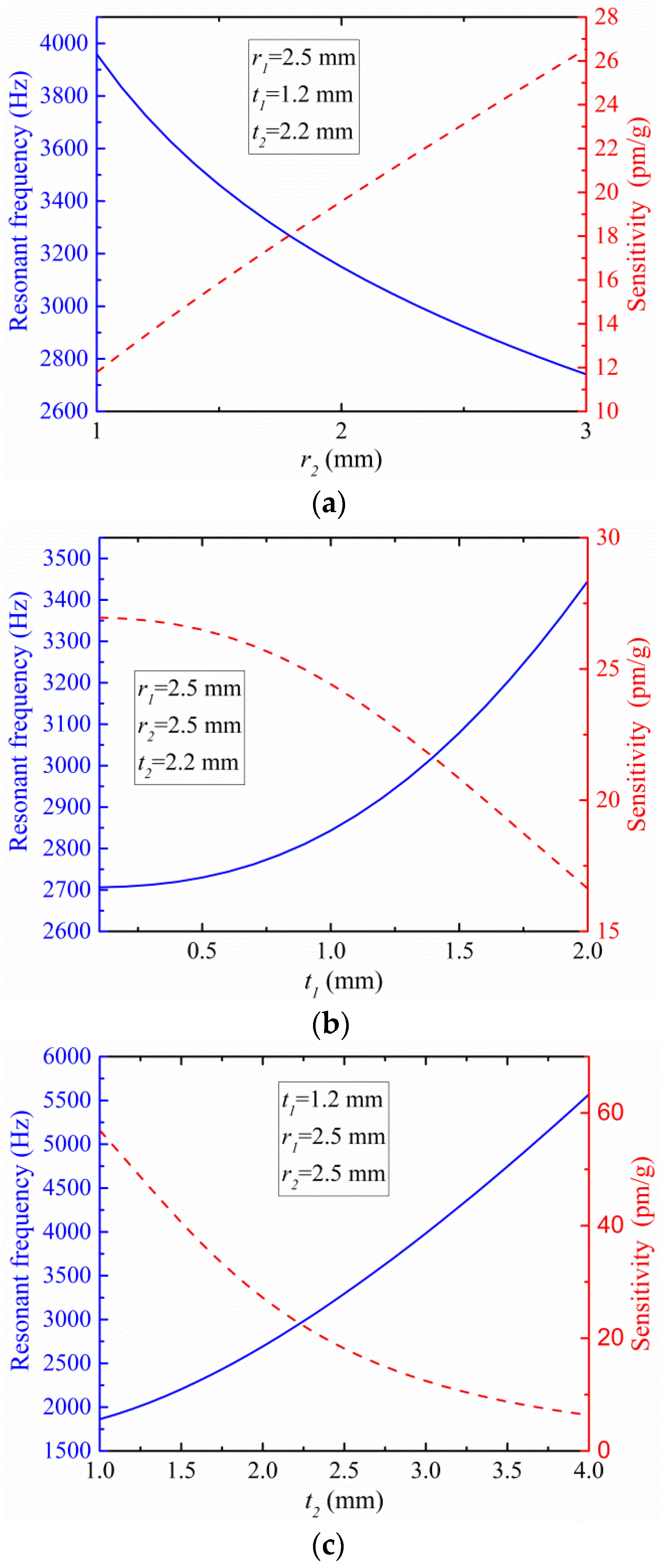
2.4. Dimensional Parameter Optimization
3. Simulation Analysis of the Sensor
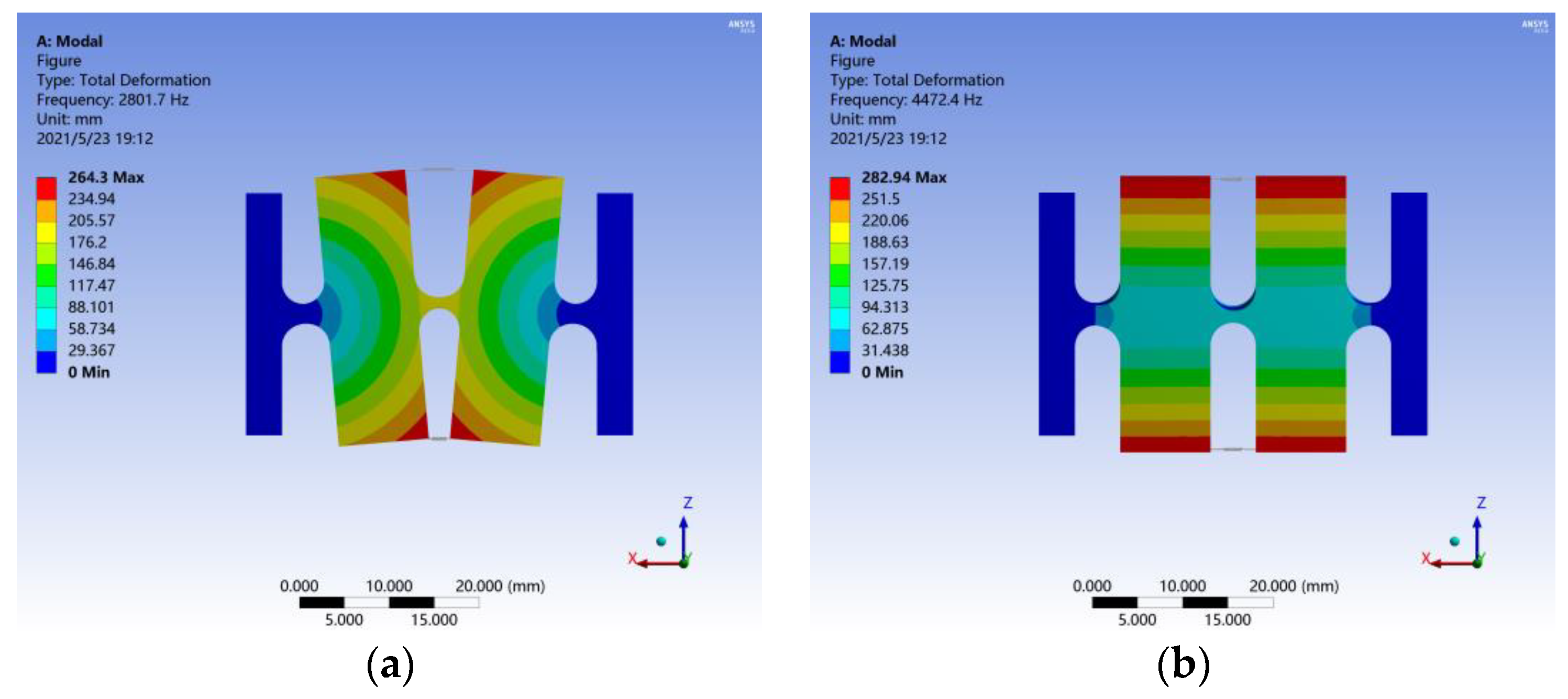
3.1. Model Analysis
3.2. Harmonic Response Analysis
4. Experimental Characterization of the Sensing Properties
4.1. Fabrication of Sensor
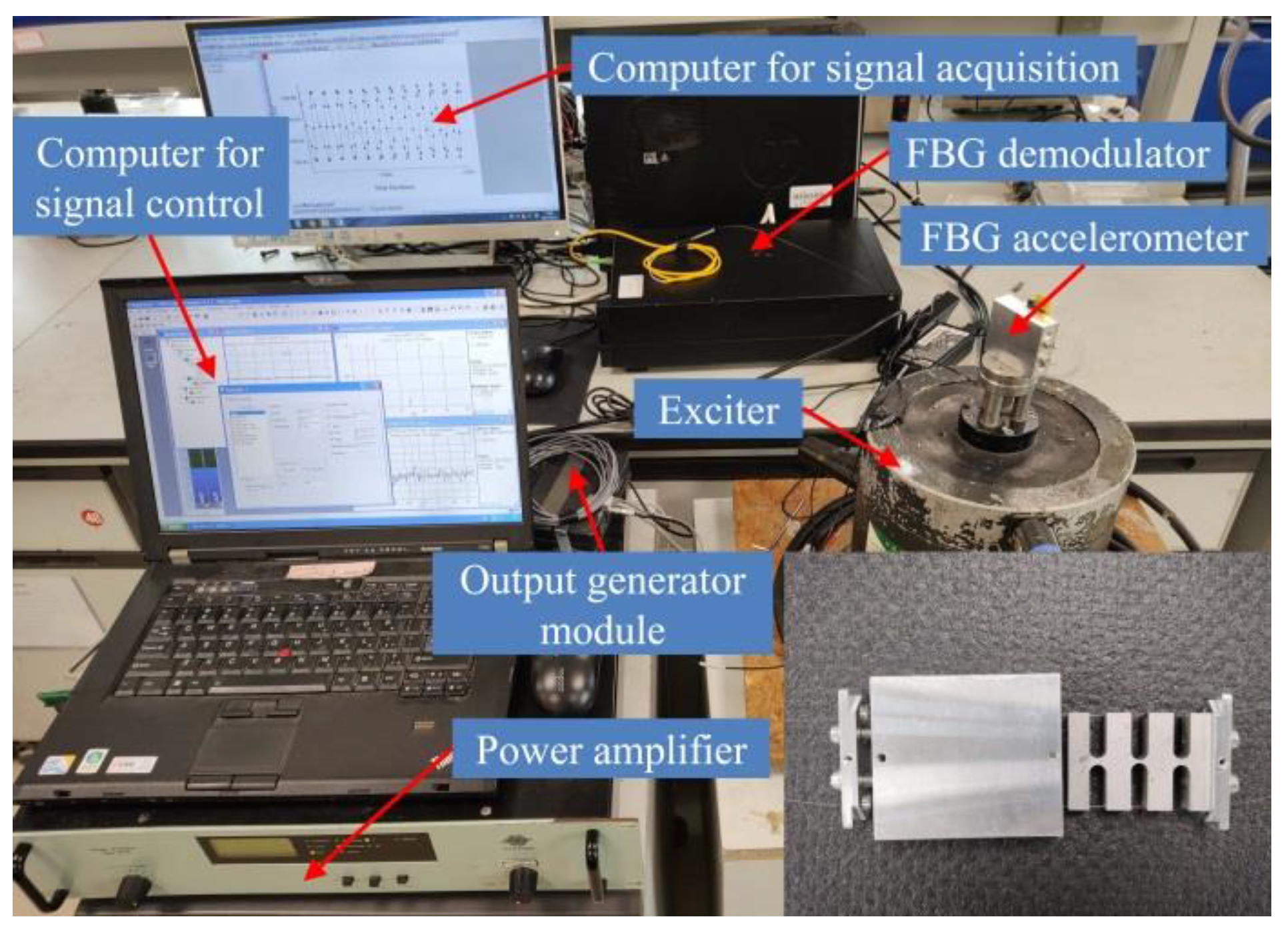
4.2. Experimental System Compositions
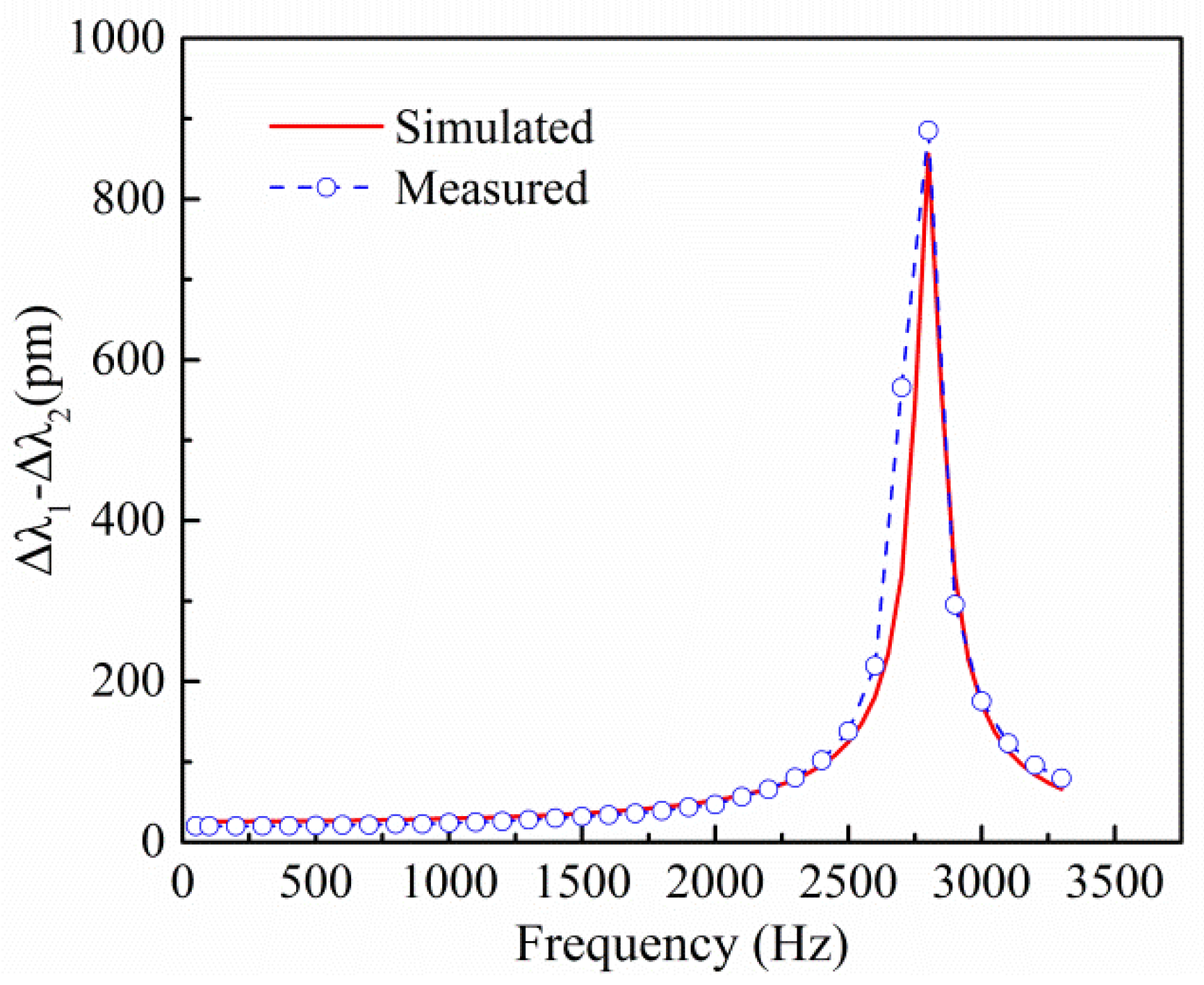
4.3. Amplitude-Frequency Response
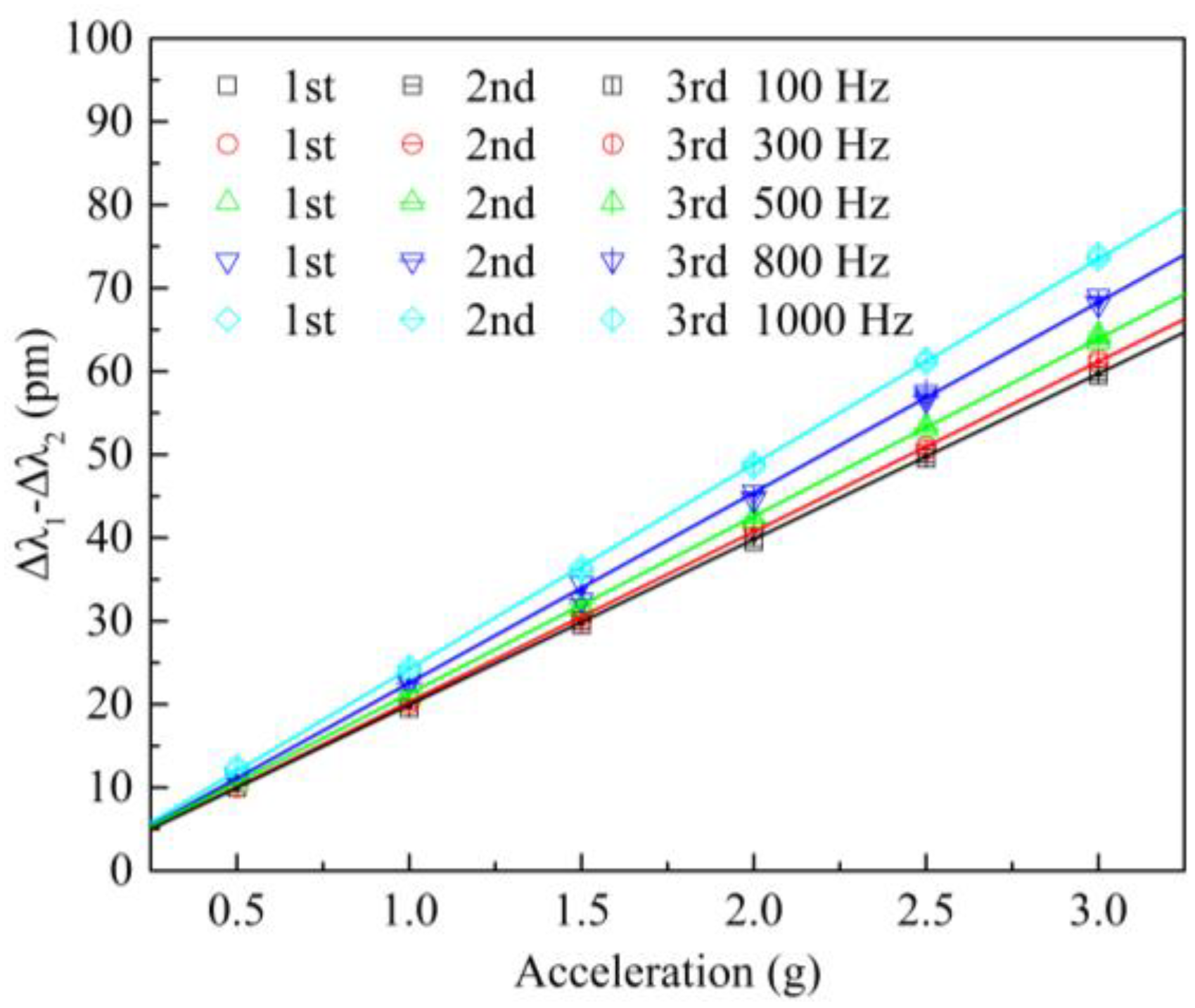
4.4. Sensitivity
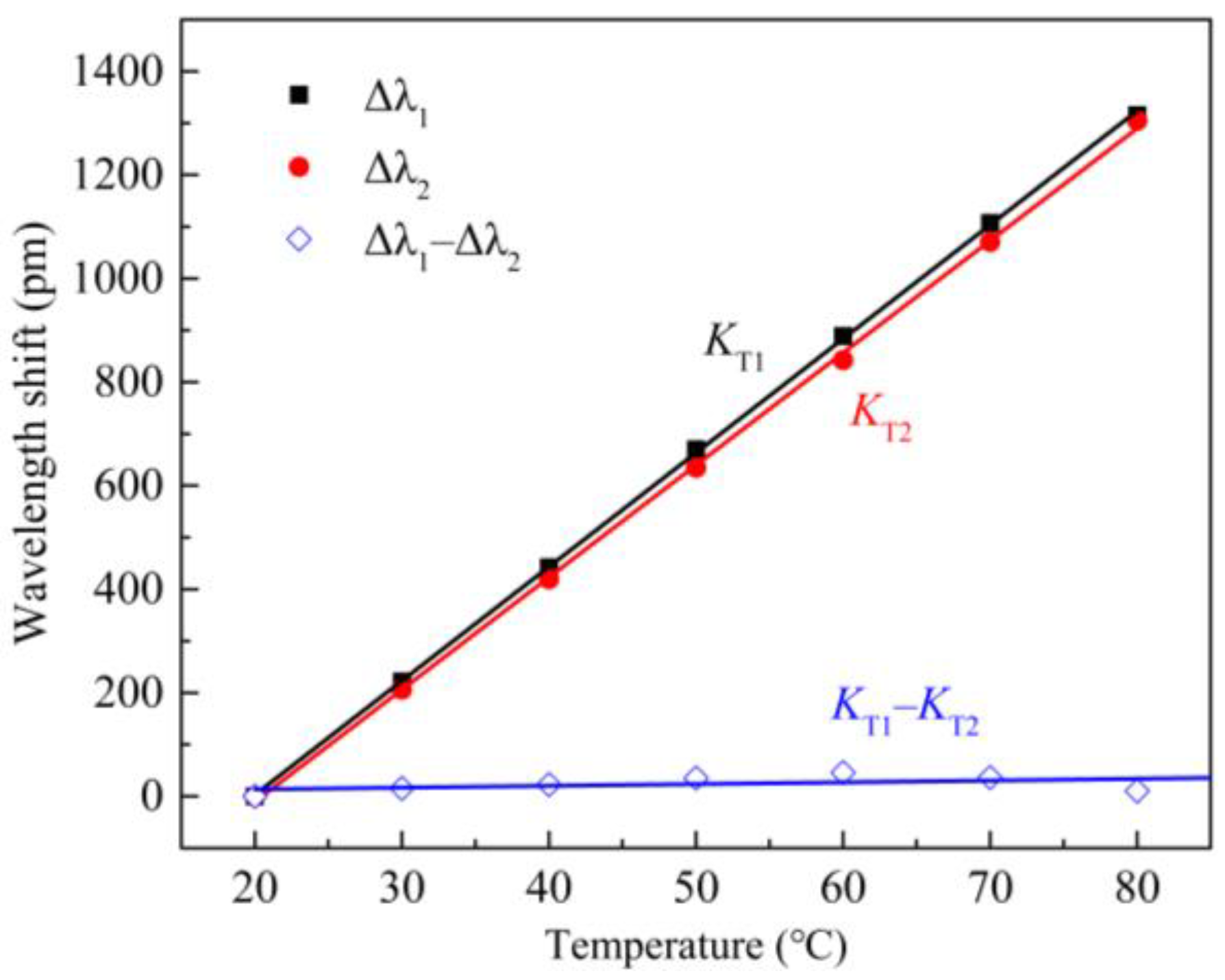
4.5. Temperature Self-Compensation
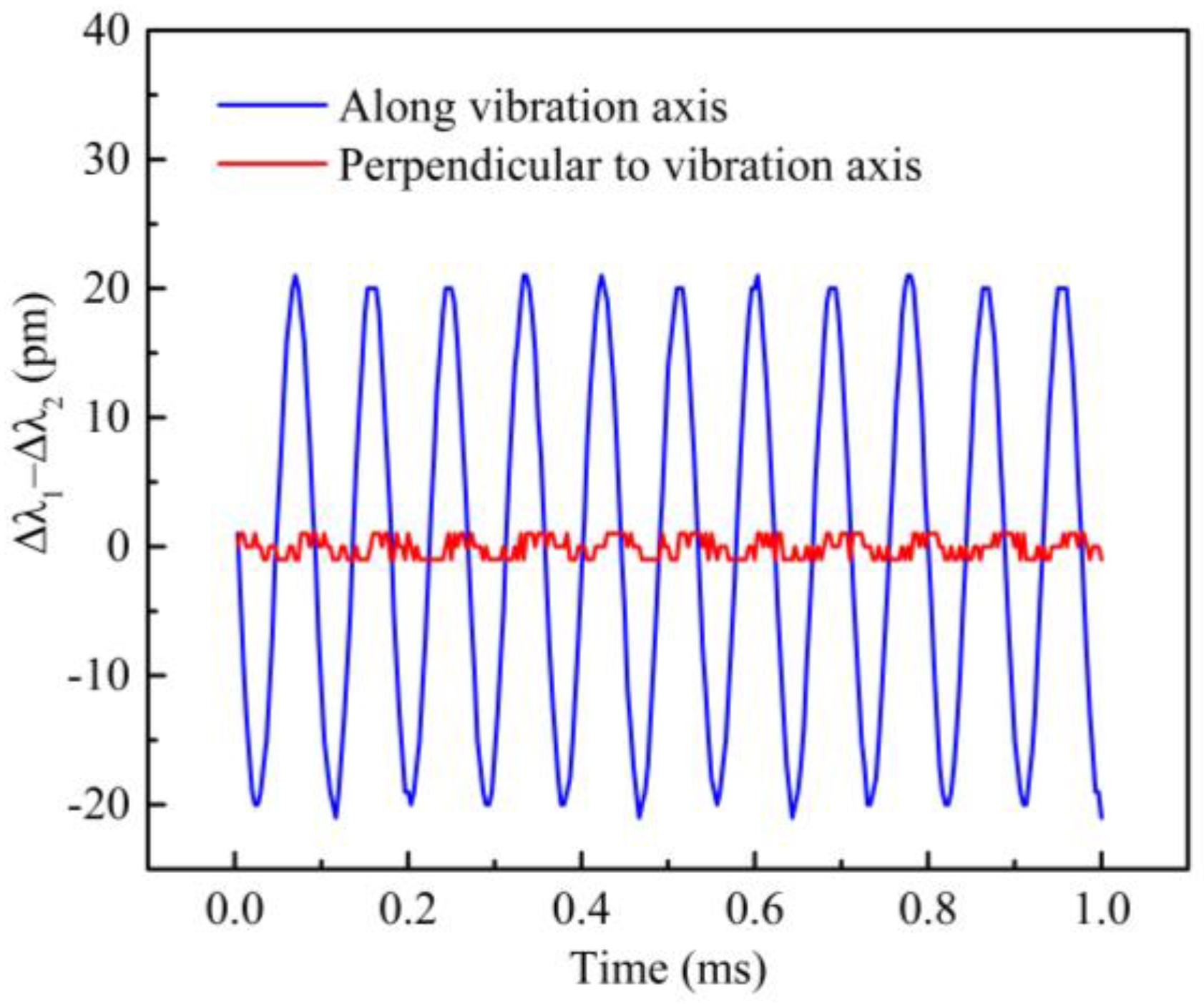
4.6. Cross-Interference Characteristic
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Baccarini, L.M.R.; Silva, V.V.R.; Menezes, B.R.; Caminhas, W.M. SVM practical industrial application for mechanical faults diagnostic. Expert Syst. Appl. 2011, 38, 6980–6984. [Google Scholar] [CrossRef]
- Li, P.; Kong, F.; He, Q.; Liu, Y. Multiscale slope feature extraction for rotating machinery fault diagnosis using wavelet analysis. Measurement 2013, 46, 497–505. [Google Scholar] [CrossRef]
- Safizadeh, M.S.; Latifi, S.K. Using multi-sensor data fusion for vibration fault diagnosis of rolling element bearings by accelerometer and load cell. Inf. Fusion. 2014, 18, 1–8. [Google Scholar] [CrossRef]
- Catalano, A.; Bruno, F.A.; Pisco, M.; Cutolo, A.; Cusano, A. An Intrusion Detection System for the Protection of Railway Assets Using Fiber Bragg Grating Sensors. Sensors 2014, 14, 18268–18285. [Google Scholar] [CrossRef] [PubMed]
- Ye, X.W.; Su, Y.H.; Xi, P.S. Statistical Analysis of Stress Signals from Bridge Monitoring by FBG System. Sensors 2018, 18, 491. [Google Scholar] [CrossRef] [Green Version]
- Qiao, X.; Shao, Z.; Bao, W.; Rong, Q. Fiber Bragg Grating Sensors for the Oil Industry. Sensors 2017, 17, 429. [Google Scholar] [CrossRef] [PubMed]
- Shen, J.; Zeng, X.; Luo, Y.; Cao, C.; Wang, T. Research on Strain Measurements of Core Positions for the Chinese Space Station. Sensors 2018, 18, 1834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Goossens, S.; Pauw, B.D.; Geernaert, T.; Salmanpour, M.S.; Khodaei, Z.S.; Karachalios, E.; Castillo, D.S.; Thienpont, H.; Berghmans, F. Aerospace-grade surface mounted optical fibre strain sensor for structural health monitoring on composite structures evaluated against in-flight conditions. Smart Mater. Struct. 2019, 28, 065008. [Google Scholar] [CrossRef]
- Antunes, P.; Lima, H.; Varum, H.; André, P. Optical fiber sensors for static and dynamic health monitoring of civil engineering infrastructures: Abode wall case study. Measurement 2012, 45, 1695–1705. [Google Scholar] [CrossRef]
- Linessio, R.P.; Sousa, K.D.; Silva, T.D.; Bavastri, C.A.; Antunes, P.F.D.; Silva, J.C.C. Induction Motors Vibration Monitoring Using a Biaxial Optical Fiber Accelerometer. IEEE Sens. J. 2016, 16, 8075–8082. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, C.; Li, H.; He, Z.; Zhao, X. Optical fiber grating vibration sensor for vibration monitoring of hydraulic pump. Photonic Sens. 2018, 7, 140–147. [Google Scholar] [CrossRef] [Green Version]
- Yüksel, K.; Kinet, D.; Moeyaert, V.; Kouroussis, G.; Caucheteur, C. Railway monitoring system using optical fiber grating accelerometers. Smart Mater. Struct. 2018, 27, 105033. [Google Scholar] [CrossRef]
- Lim, K.S.; Zaini, M.K.A.; Ong, Z.C.; Abas, F.Z.M.; Salim, M.A.B.M.; Ahmad, H. Vibration Mode Analysis for a Suspension Bridge by Using Low-Frequency Cantilever-Based FBG Accelerometer Array. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]
- Liu, Q.; Jia, Z.; Fu, H.; Yu, D.; Gao, H.; Qiao, X. Double Cantilever Beams Accelerometer Using Short Fiber Bragg Grating for Eliminating Chirp. IEEE Sens. J. 2016, 16, 6611–6616. [Google Scholar] [CrossRef]
- Parida, O.P.; Thomas, J.; Nayak, J.; Asokan, S. Double-L Cantilever-Based Fiber Bragg Grating Accelerometer. IEEE Sens. J. 2019, 19, 11247–11254. [Google Scholar] [CrossRef]
- Udos, W.; Lee, Y.-S.; Lim, K.-S.; Ong, Z.-C.; Zaini, M.K.A.; Ahmad, H. Signal enhancement of FBG-based cantilever accelerometer by resonance suppression using magnetic damper. Sens. Actuators A 2020, 304, 111895. [Google Scholar] [CrossRef]
- Li, S.; Feng, Z.; Ma, Q.; Wang, R.; Zhou, R.; Qiao, X. Fiber Bragg grating accelerometer based on symmetrical tilting cantilever beams and solder glass packaging for harsh environment. Opt. Fiber Technol. 2021, 65, 102579. [Google Scholar] [CrossRef]
- Zhao, X.; Jia, Z.; Fan, W.; Liu, W.; Gao, H.; Yang, K.; Yu, D. A Fiber Bragg Grating acceleration sensor with temperature compensation. Optik 2021, 241, 166993. [Google Scholar] [CrossRef]
- Liu, Q.; He, X.; Qiao, X.; Sun, T.; Grattan, K.T.V. Design and Modeling of a High Sensitivity Fiber Bragg Grating-Based Accelerometer. IEEE Sens. J. 2019, 19, 5439–5445. [Google Scholar] [CrossRef]
- Li, T.; Tan, Y.; Han, X.; Zheng, K.; Zhou, Z. Diaphragm Based Fiber Bragg Grating Acceleration Sensor with Temperature Compensation. Sensors 2017, 17, 218. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Jiang, S.; Wang, C.; Ni, J.; Zhao, Q. Broadband and High Sensitivity FBG Accelerometer Based on Double Diaphragms and h-Shaped Hinges. IEEE Sens. J. 2021, 21, 353–359. [Google Scholar] [CrossRef]
- Qiu, L.; Liang, L.; Li, D.; Xu, G. Theoretical and experimental study on FBG accelerometer based on multi-flexible hinge mechanism. Opt. Fiber Technol. 2017, 38, 142–146. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, W.; Zhang, Y.; Chen, L.; Yan, T.; Wang, S.; Yu, L.; Li, Y.P. 2-D Medium–High Frequency Fiber Bragg Gratings Accelerometer. IEEE Sens. J. 2017, 17, 614–618. [Google Scholar] [CrossRef]
- Song, H.; Wang, Q.; Liu, M.; Cai, Q. A Novel Fiber Bragg Grating Vibration Sensor Based on Orthogonal Flexure Hinge Structure. IEEE Sens. J. 2020, 20, 5277–5285. [Google Scholar] [CrossRef]
- Yan, B.; Liang, L. A Novel Fiber Bragg Grating Accelerometer Based on Parallel Double Flexible Hinges. IEEE Sens. J. 2020, 20, 4713–4718. [Google Scholar] [CrossRef]
- Wei, L.; Yu, L.; Wang, J.; Jiang, D.; Liu, Q.; Liu, Z. An FBG-Sensing Two-Dimensional Vibration Sensor Based on Multi-Axis Flexure Hinge. IEEE Sens. J. 2019, 19, 3698–3710. [Google Scholar] [CrossRef]
- Wang, H.; Liang, L.; Zhou, X.; Tu, B. New Fiber Bragg Grating Three-Dimensional Accelerometer Based on Composite Flexure Hinges. Sensors 2021, 21, 4715. [Google Scholar] [CrossRef]
- Stefani, A.; Andresen, S.; Yuan, W.; Herholdt-Rasmussen, N.; Bang, O. High sensitivity polymer optical fiber-Bragg-grating-based accelerometer. IEEE Sens. J. 2012, 24, 763–765. [Google Scholar] [CrossRef]
- Dai, Y.; Yin, G.; Liu, B.; Xu, G.; Karanja, J.M. Medium-high frequency FBG accelerometer with integrative matrix structure. Appl. Opt. 2015, 54, 3115–3121. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, D.; Zhou, Z.; Xiong, L.; Deng, X. Welding-packaged accelerometer based on metal-coated FBG. Chin. Opt. Lett. 2013, 11, 070604. [Google Scholar]
- Wang, X.; Guo, Y.; Xiong, L.; Wu, H. High-Frequency Optical Fiber Bragg Grating Accelerometer. IEEE Sens. J. 2018, 18, 4954–4960. [Google Scholar] [CrossRef]
- Wu, H.; Lin, Q.; Han, F.; Zhao, L.; Jiang, Z. Design and analysis of high-frequency fiber Bragg grating vibration sensor. Meas. Sci. Technol. 2021, 32, 025108. [Google Scholar] [CrossRef]
- Wu, Y.F.; Zhou, Z.Y. Design of flexure hinges. Eng. Mech. 2002, 19, 136–140. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Description | Value (Units) |
|---|---|---|
| r1 | Radius of hinge-1 | 2.5 mm |
| t1 | Waist thickness of hinge-1 | 1.2 mm |
| r2 | Radius of hinge-2 | 2.5 mm |
| t2 | Waist thickness of hinge-2 | 2.2 mm |
| d | Width of mass block | 10 mm |
| h | Height of mass block | 30 mm |
| w | Width of hinges | 8 mm |
| l | Fiber pasting span | 5 mm |
| Af | Section area of optical fiber | 1.227 × 10−8 m2 |
| Ef | Young’s modulus of optical fiber | 70 GPa |
| E | Young’s modulus of 304 steel | 210 GPa |
| ρ | Density of 304 steel | 7850 kg·m−3 |
| μ | Poisson’s ratio of 304 steel | 0.3 |
| g | Gravitational acceleration | 9.8 m·s−2 |
| Ref | Resonance Frequency | Sensitivity | Fiber Type | Temperature Self-Compensation |
|---|---|---|---|---|
| Stefani [28] | 3000 Hz | 19 pm/g | Polymer FBG | No |
| Dai [29] | 2918 Hz | 13.82 pm/g | Silica FBG | No |
| Guo [30] | 3600 Hz | 1.7 pm/g | Metalized FBG | No |
| Wang [31] | 3806 Hz | 4.01 pm/g | Silica FBG | Yes |
| Wu [32] | 8356 Hz | 0.46 pm/g | Silica FBG | Yes |
| This article | 2800 Hz | 21.8 pm/g | Silica FBG | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Liang, L.; Wang, H.; Dai, S.; Jiang, K.; Song, Z. A Medium-Frequency Fiber Bragg Grating Accelerometer Based on Flexible Hinges. Sensors 2021, 21, 6968. https://doi.org/10.3390/s21216968
Li Z, Liang L, Wang H, Dai S, Jiang K, Song Z. A Medium-Frequency Fiber Bragg Grating Accelerometer Based on Flexible Hinges. Sensors. 2021; 21(21):6968. https://doi.org/10.3390/s21216968
Chicago/Turabian StyleLi, Zichuang, Lei Liang, Hui Wang, Shu Dai, Ke Jiang, and Zhiyuan Song. 2021. "A Medium-Frequency Fiber Bragg Grating Accelerometer Based on Flexible Hinges" Sensors 21, no. 21: 6968. https://doi.org/10.3390/s21216968