
Determination of the Kinematic Excitation Originating from the Irregular Envelope of an Omnidirectional Wheel



Abstract
:1. Introduction
2. Test Stand Description
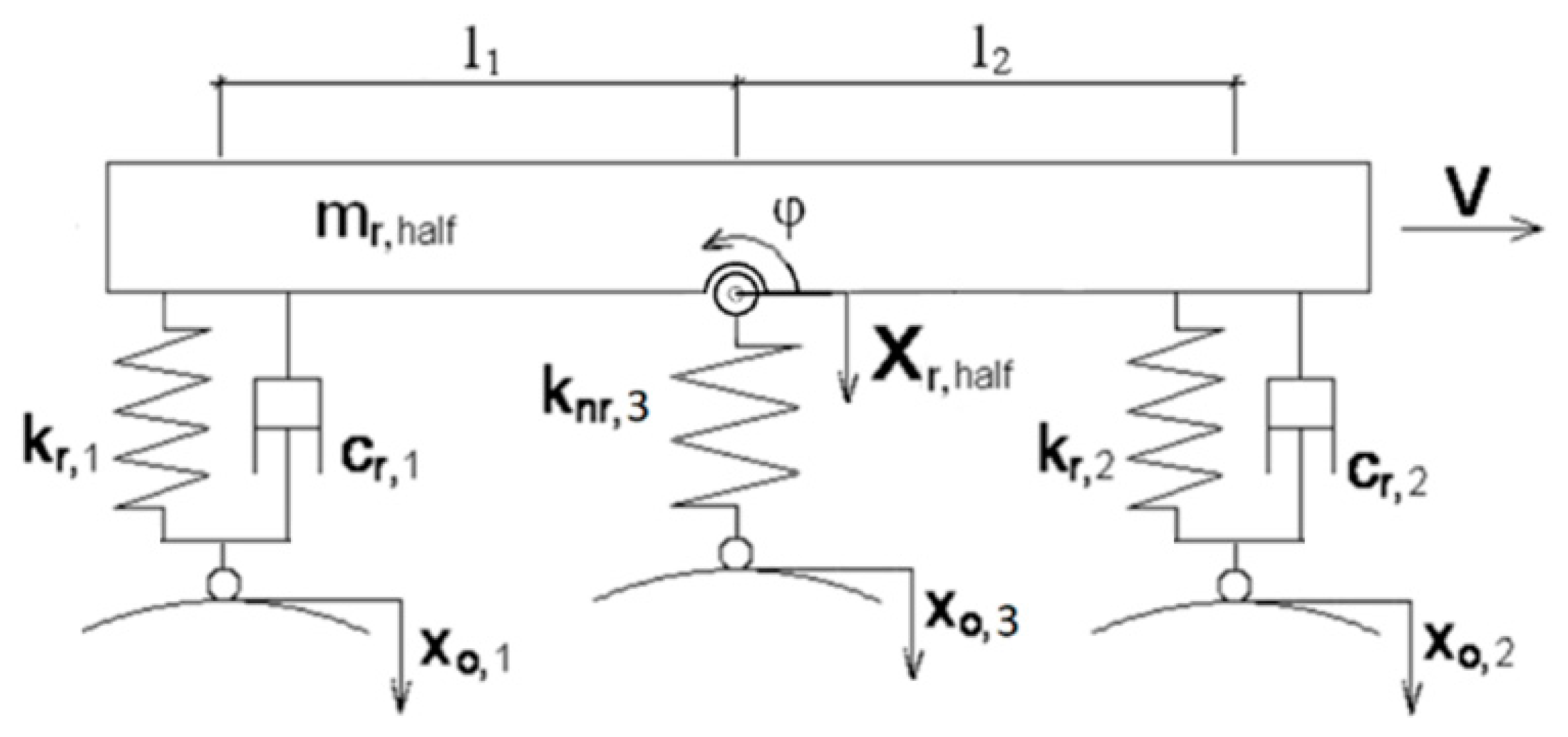
2.1. Working Principle
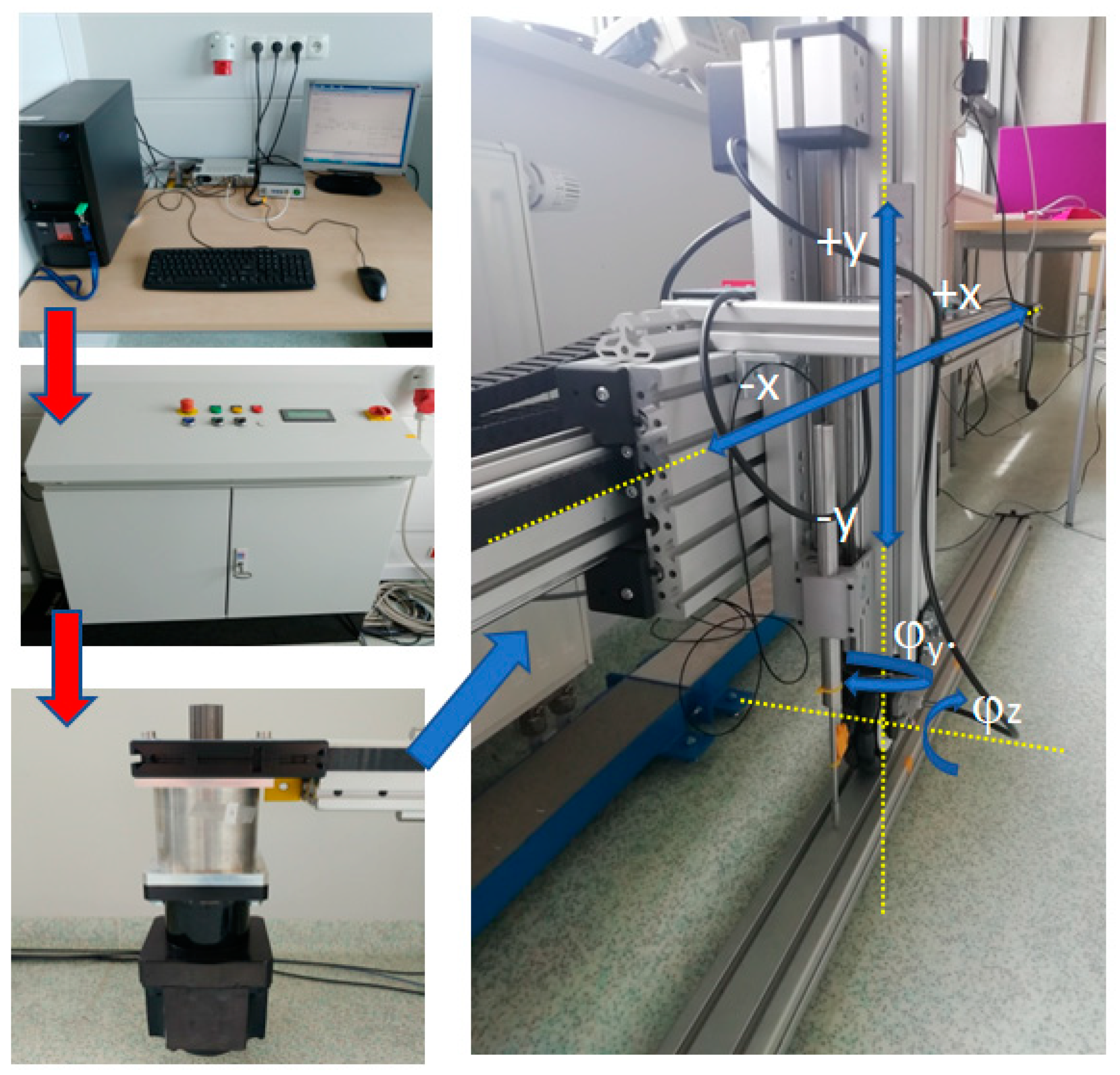
2.2. Drive System
- PC with a drive control card and MATLAB software;
- Control cabinet provided with interface TTL/+24 V;
- Linear drive with a 1 kW servo motor installed at its end;
- Vertical upright with an installed omnidirectional wheel.
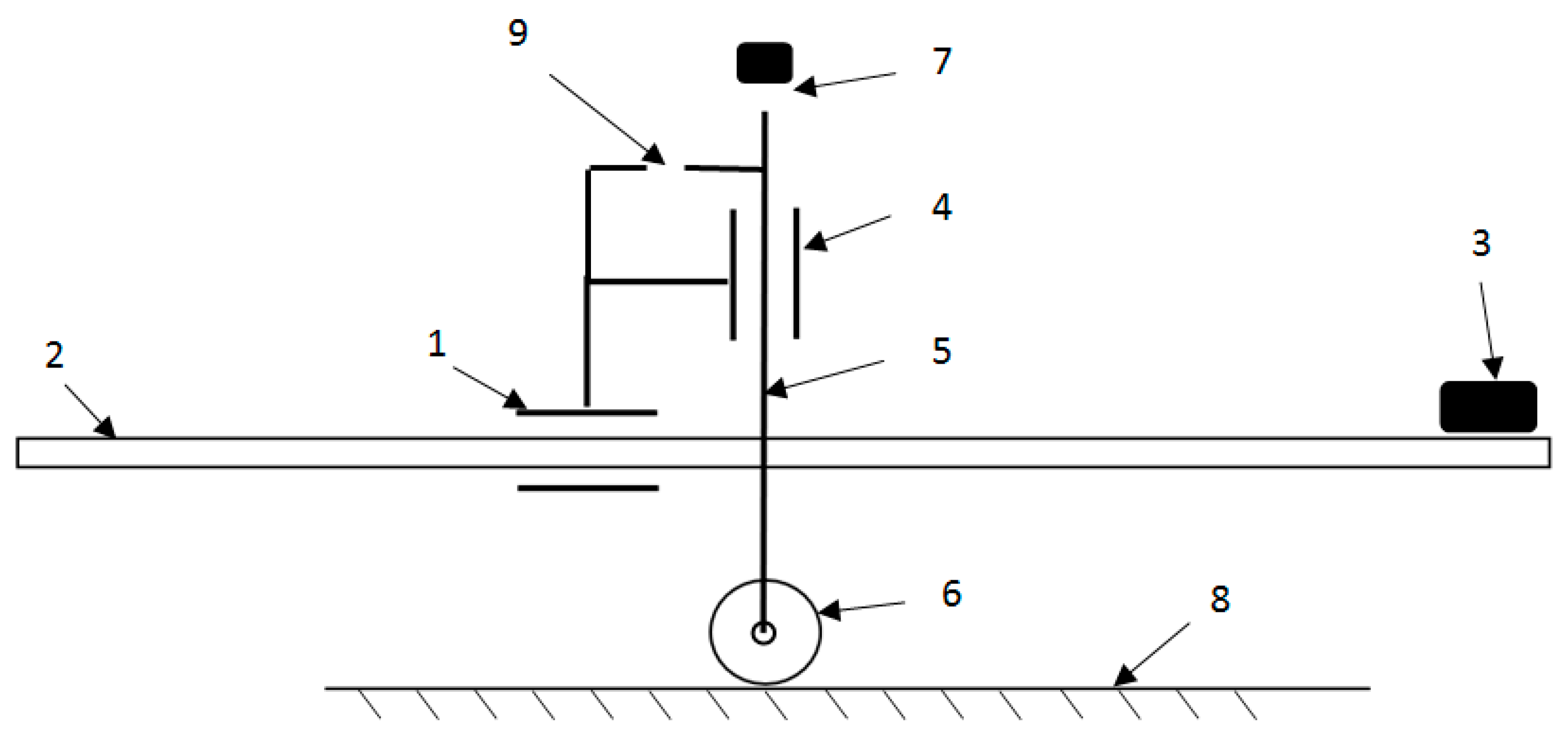
2.3. Measuring System
- Two optical sensors, Philtec RC171 (A and B);
- One linear displacement sensor, LVDT Solartron Metrology (Figure 6C).
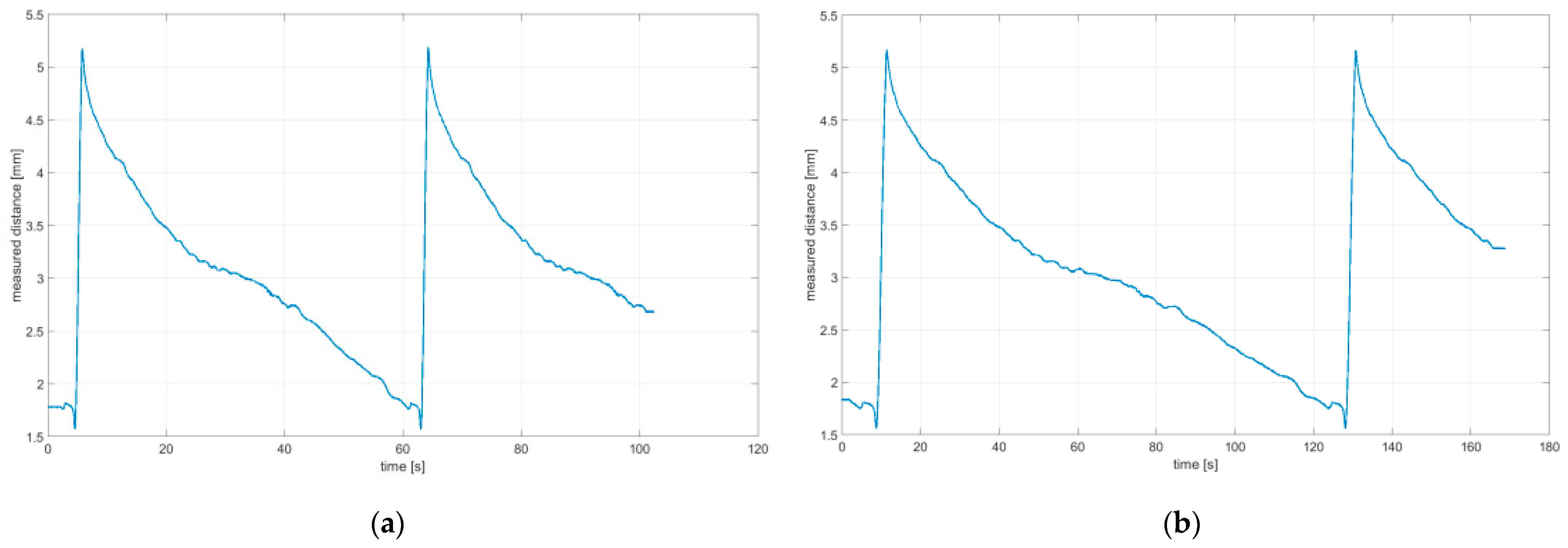
3. Performance of Tests
4. Discussion
- Results regarding the irregularities of the omnidirectional wheel envelope are distinct for particular variants. In general, readings for the same variants were repeatable, as particular values of the envelope irregularity depended on changing the wheel’s geometry or stiffness and the variable geometry or deformability of particular rollers (Table 3, variant VII) resulting from the roller manufacture method, for instance. The final irregularity of an omnidirectional wheel also depends on the initial position of the roller in contact with the surface.
- The obtained wheel irregularity differs from the geometry profile, as it considers the deformability of rollers and their assembly.
- According to the analysis of the readings displayed in Table 3, for a wheel at an angle of 0°, particular rollers are in contact with the surface one after the other. For a wheel at an angle of 15–45°, two rollers are in contact with the surface simultaneously, and three rollers for a wheel is at an angle of 60–75°. In each case, there was no continual contact between the wheel and the surface.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Gniłka, J.; Mężyk, A. Experimental identification and selection of dynamic properties of a high-speed tracked vehicle suspension system. Eksploat. I Niezawodn. Maint. Reliab. 2017, 19, 108–113. [Google Scholar] [CrossRef]
- Qian, J.; Zi, B.; Wang, D. The design and development of an omni-directional mobile robot oriented to an intelligent manufacturing system. Sensors 2017, 17, 2073. [Google Scholar] [CrossRef] [Green Version]
- Blumrich, J. Omnidirectional Wheel. U.S. Patent No. 3,789,947, 5 February 1974. [Google Scholar]
- Ullrich, G. Automated Guided Vehicle Systems: A Primer with Practical Applications; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Kálmán, V. Controlled Braking for Omnidirectional Wheels. Int. J. Control. Sci. Eng. 2013, 3, 48–57. [Google Scholar] [CrossRef]
- Burghardt, A.; Szybicki, D.; Kurc, K.; Muszyńska, M. Mechatronic Designing and Prototyping of a Mobile Wheeled Robot Driven by a Microcontroller. J. Theor. Appl. Mech. 2020, 58, 127–142. [Google Scholar] [CrossRef]
- Giurgiu, T.; Puica, C.; Pupaza, C.; Nicolescu, F.A.; Zapciu, M. Mecanum Whell Modeling for Studying Roller—Ground Contact Issues. UPB. Sci. Bull. Ser. D 2017, 79. [Google Scholar]
- Park, Y.K.; Lee, P.; Choi, J.K.; Byun, K.S. Analysis of Factors Related to Vertical Vibration of Continuous Alternate Wheels for Omnidirectional Mobile Robots. Intell. Serv. Robot. 2016, 9, 207–216. [Google Scholar] [CrossRef]
- Waluś, K.J.; Polasik, J.; Mielniczuk, J.; Warguła, Ł. Experimental tests of vehicle body accelerations at selected road and rail crossings. In Proceedings of the XXIII Polish-Slovak Scientific Conference on Machine Modelling and Simulations, Rydzyna, Poland, 4–7 September 2018; Volume 254, p. 04002. [Google Scholar] [CrossRef]
- Polasik, J.; Walus, K.J. Analysis of the force during overcoming the roadblock -the preliminary experimental tests. Transp. Probl. 2016, 11, 113–120. [Google Scholar] [CrossRef] [Green Version]
- Pawel, H.; Miroslaw, P. Interactive 7-DOF Motion Controller of the Operator Arm (ExoArm 7-DOF). In Proceedings of the 2017 IEEE International Conference on INnovations in Intelligent SysTems and Applications (INISTA), Gdynia, Poland, 3–5 July 2017; pp. 185–188. [Google Scholar]
- Gembalczyk, G.; Duda, S.; Świtoński, E. Computational Optimization and Implementation of Control System for Mechatronic Treadmill with Body Weight Support System. J. Theor. Appl. Mech. 2018, 56, 1179–1191. [Google Scholar] [CrossRef]
- Kciuk, S.; Kciuk, M.; Machoczek, T.; Klein, W. Magnetorheological Suspension Based on Silicone Oil. Adv. Intell. Syst. Comput. 2019, 934, 201–219. [Google Scholar] [CrossRef]
- Moreno, J.; Clotet, E.; Tresanchez, M.; Martínez, D.; Casanovas, J.; Palacín, J. Measurement of Vibrations in Two Tower-Typed Assistant Personal Robot Implementations with and without a Passive Suspension System. Sensors 2017, 17, 1122. [Google Scholar] [CrossRef] [Green Version]
- Palacín, J.; Martínez, D.; Rubies, E.; Clotet, E. Suboptimal Omnidirectional Wheel Design and Implementation. Sensors 2021, 21, 865. [Google Scholar] [CrossRef]
- Czapla, T.; Fice, M.; Niestrój, R. Wheel-Surface Model Parameters Estimation: Sand Humidity Influence on Traction Effort of All-Terrain Unmanned Vehicle. Lat. Am. J. Solids Struct. 2019, 16, 117. [Google Scholar] [CrossRef] [Green Version]
- Muir, P.F.; Neuman, C.P. Kinematic Modeling of Wheeled Mobile Robots. J. Robot. Syst. 1987, 4, 281–340. [Google Scholar] [CrossRef]
- Szuster, M.; Hendzel, Z.; Burghardt, A. Fuzzy Sensor-Based Navigation with Neural Tracking Control of the Wheeled Mobile Robot. In Proceedings of the International Conference on Artificial Intelligence and Soft Computing, Zakopane, Poland, 1–5 June 2014; pp. 302–313. [Google Scholar] [CrossRef]
- Zhao, D.; Deng, X.; Yi, J. Motion and Internal Force Control for Omnidirectional Wheeled Mobile Robots. IEEE/ASME Trans. Mechatron. 2009, 14, 382–387. [Google Scholar] [CrossRef]
- Harris, D.B. Method for Designing Low Vibration Omni-Directional Wheels. J. Acoust. Soc. Am. 2005, 117, 1696. [Google Scholar] [CrossRef]
- Ye, C.; Ni, H.; Ma, S. Development of an Omni-Directional Wheel with Differential Structure. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1633–1638. [Google Scholar]
- He, C.; Wu, D.; Chen, K.; Liu, F.; Fan, N. Analysis of the Mecanum Wheel Arrangement of an Omnidirectional Vehicle. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 5329–5340. [Google Scholar] [CrossRef]
- Kosenko, I.I.; Stepanov, S.Y.; Gerasimov, K.V. Contact Tracking Algorithms in Case of the Omni-Directional Wheel Rolling on the Horizontal Surface. Multibody Syst. Dyn. 2019, 45, 273–292. [Google Scholar] [CrossRef]
- Pombo, J.; Ambrósio, J.A.C. General Spatial Curve Joint for Rail Guided Vehicles: Kinematics and Dynamics. Multibody Syst. Dyn. 2003, 9, 237–264. [Google Scholar] [CrossRef]
- Duda, S. Numerical Simulations of the Wheel-Rail Traction Forces Using the Electromechanical Model of an Electric Locomotive. J. Theor. Appl. Mech. 2014, 52, 395–404. [Google Scholar]
- Weiss, A.; Langlois, R.G.; Hayes, M.J.D. Dynamics and Vibration Analysis of the Interface between a Non-Rigid Sphere and Omnidirectional Wheel Actuators. Robotica 2015, 33, 1850–1868. [Google Scholar] [CrossRef] [Green Version]
- Bae, J.J.; Kang, N. Design Optimization of a Mecanum Wheel to Reduce Vertical Vibrations by the Consideration of Equivalent Stiffness. Shock Vib. 2016, 2016. [Google Scholar] [CrossRef]
- Dižo, J.; Blatnický, M.; Sága, M.; Harušinec, J.; Gerlici, J.; Legutko, S. Development of a new system for attaching the wheels of the front axle in the cross-country vehicle. Symmetry 2020, 12, 1156. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware Device | Parameters |
|---|---|
| optical sensors Philtec RC171 | Light Source: LED, 850 nm; Input Voltage: +12 VDC; Analog Output: 0–5 V; Operating Range: 12.7 mm; Max. resolution: 1.3 µm. |
| S-Series displacement sensor LVDT Solartron Metrology | Measuring range: 150 mm; Analog Output: 0–10 V; Linearity FSO < 0.2%. |
| ESAM Traveler 1 | 16 bits A/D-converter; Sampling rates: 100 kHz; Signal conditioner/amplifier plug-in modules for: strain gauges, potentiometric sensors, piezo-resistive sensors, thermocouples, piezo-electric sensors according to ICP-standard, digital sensors, high-level voltage signals up to ±40 V, and other sensors. |
| PC with real time boards RT-DAC4/PCI | Analog inputs: 32 channels ± 10 V, resolution 12 bit, conversion time 1.6 µs; Analog outputs: 8 channels ± 10 V, resolution 12 bit, settling time 6 µs. |
| Type | 125 mm Rotacaster |
|---|---|
| Catalogue number | R2-1258-95/S10 |
| Passive rollers quantity | 8 |
| Wheel outer diameter | 125 mm |
| Max roller diameter | 20 mm |
| Roller radius of curvature | 62.5 mm |
| Wheel static/dynamic load capacity | 68/125 kg |
| Roller hardness | 95 Shorea |
| Rollers | Polyurethane |
| Main bearings | 2 × ball bearing |
| Roller bearings | 2 × Nylon sleeves per roller |
| Body | Plastic |
| Distance between roller rows | 19 mm |
| Distance between body and roller contact with surface | Nominal 2.5 mm, min. 0.5 mm |
| Wheel width | 43 mm |
| Assembly hole diameter | 10 mm |
| Weight | 0.315 kg |
| Variant | Irregularity Graph of Omnidirectional Wheel Envelope |
|---|---|
| I-0°, wz = 0.1075 rad/s  |  |
| II-15°, wz = 0.1057 rad/s  |  |
| III-30°, wz = 0.0943 rad/s  |  |
| IV-45°, wz = 0.0757 rad/s  |  |
| V-60°, wz = 0.0527 rad/s  |  |
| VI-75° wz = 0.019 rad/s  |  |
| VII-90° wz = 0 rad/s  |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duda, S.; Dudek, O.; Gembalczyk, G.; Machoczek, T. Determination of the Kinematic Excitation Originating from the Irregular Envelope of an Omnidirectional Wheel. Sensors 2021, 21, 6931. https://doi.org/10.3390/s21206931
Duda S, Dudek O, Gembalczyk G, Machoczek T. Determination of the Kinematic Excitation Originating from the Irregular Envelope of an Omnidirectional Wheel. Sensors. 2021; 21(20):6931. https://doi.org/10.3390/s21206931
Chicago/Turabian StyleDuda, Sławomir, Olaf Dudek, Grzegorz Gembalczyk, and Tomasz Machoczek. 2021. "Determination of the Kinematic Excitation Originating from the Irregular Envelope of an Omnidirectional Wheel" Sensors 21, no. 20: 6931. https://doi.org/10.3390/s21206931