1. Introduction
The performance of every system degrades over time due to external factors such as the environment it operates in or due to its operating condition. Maintenance is the key to ensuring the safe and reliable operation of a system throughout its operational life. Depending on the industry, ineffective maintenance could cost the industry up to
$60 billion each year [
1]. With the development of the concept of the internet of things (IoT) and the development of wireless sensor network technology, a newer maintenance strategy termed Prognostics and Health Monitoring (PHM) is growing in usage due to its cost-effectiveness and the increasing availability of the number of Internet-enabled devices on the market [
2]. The functional architecture of PHM typically consists of six layers, including 1. Data acquisition 2. Data Manipulation 3. Condition Monitoring 4. Health assessment 5. Prognostics and 6. Decision Making.
Since the data acquisition layer forms the bedrock on which subsequent layers depend, it is imperative to provide high-quality information for effective fault diagnosis and prognosis to aid in decision making. A primary component of the data acquisition layer is the sensor units. Sensor units provide a means for measuring, monitoring and tracking environmental and operational parameters. Considering the recent developments in sensor technology there are numerous types of sensors available in the market to measure parameters such as displacement, acceleration, force, temperature, light, touch, location, gas and biological matter [
3]. In light of the increasing type and number of sensors, for effective deployment of the PHM system, an efficient sensor selection process needs to be established. (in order to avoid confusion, it should be noted that sensor selection has two meanings in the field. One refers to the selection of sensors from the set already deployed into a network; the selection process is used to optimize the network by choosing which sensors will be active at a given time [
4]. The meaning intended in this work refers to the selection of sensors to be integrated into a system during the design and build process or after the process; in this case, the selection process is focused on incorporating the most appropriate sensors for the task at hand [
5]).
The sensor selection process varies from smaller systems or experimental setups to larger systems that are deployed and being used by the end-user. The sensor selection process for the experimental systems/setups is empirical in nature and simple, whereas the selection process for large complex systems is mainly systematic and requires several additional considerations. Several sensor selection methods have been proposed over the years, but most methods are not scalable, i.e., the selection method for experimental setups cannot be used for large complex systems and vice versa. In addition, the task of sensor selection itself is complicated by the lack of standard vocabulary in characterizing existing sensors and associated specifications. Most existing sensor selection processes are quite complicated; some require the use of specialized software and advanced approaches. This paper aims to establish a sensor selection framework suitable for both experimental setups and large complex systems.
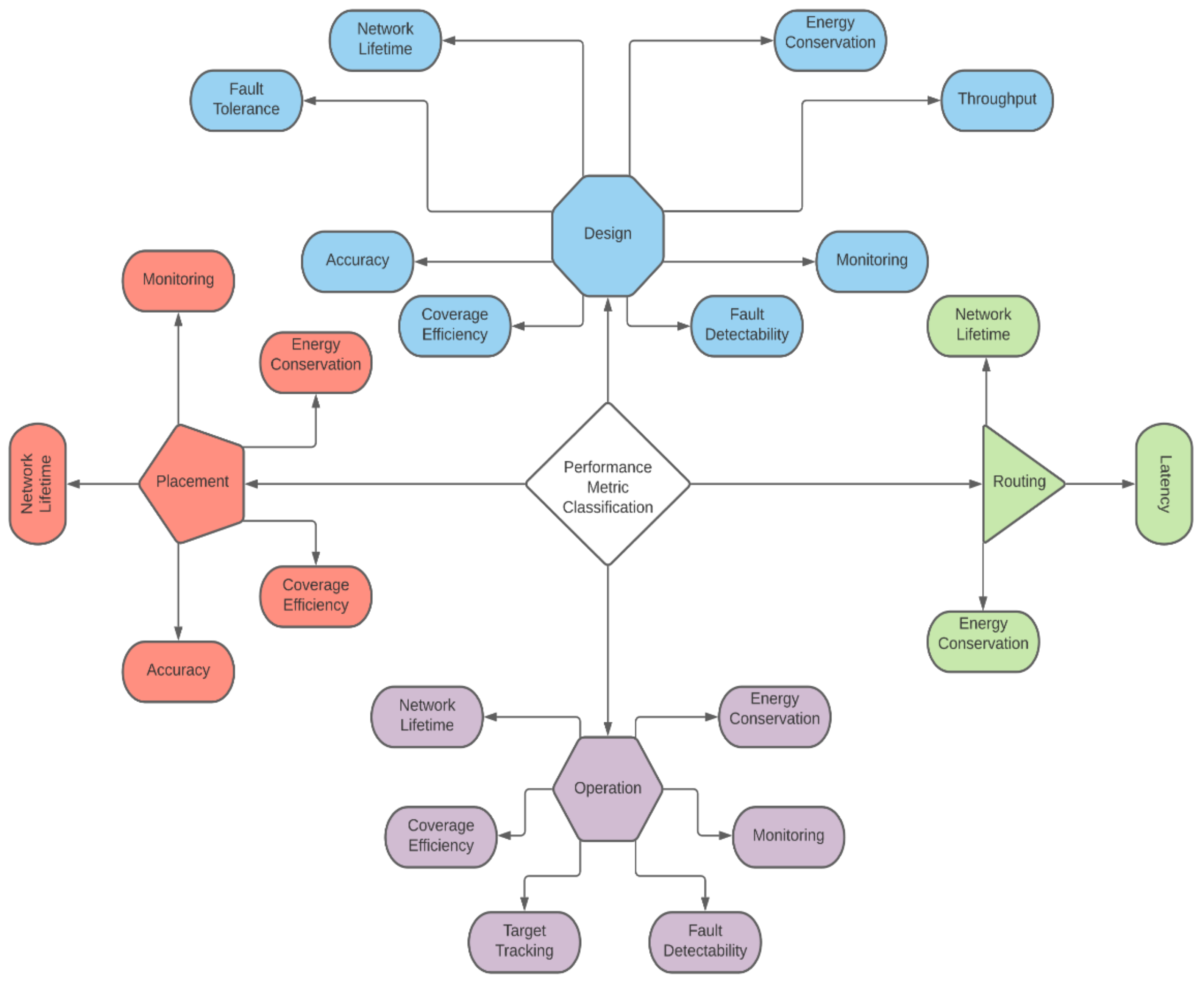
In the past, sensor selection relied heavily on the domain knowledge of the decision-maker thereby making it subjective. Recently, several sensor selection methods have been proposed based on graphical and semantic approaches, with explicitly stated objectives and constraints as shown in
Figure 1. The objectives are also referred to as performance requirements or figures-of-merits (FOM) in the literature. Some sensor selection processes have been proposed for experimental setups, but most of them are for large complex systems. Sensor selection as outlined by Santi, Sowers and Aguilar [
6], forming the basis for the methods proposed in the literature. This process starts with design engineers creating a detailed and unambiguous list of the operating, environmental, physical and cost specifications for the system. After building an in-depth understanding of the physics of the system and its use context, the next step is to identify the measurement principle. Next is the identification of the sensing methods. Note that a multitude of sensing methods are available for each of the candidate measurement principles in the list. The final step in the process is to select the sensors that best fit the constraints of the scenario. In Cheng, Azarian and Pecht [
7], the authors discuss criteria such as parameters to be measured, performance needs, electrical and physical attributes, reliability and cost for sensor system selection for PHM applications. In the next section, a review of the literature associated with the study of sensor selection is classified into (a) empirical sensor selection process for experimental setups and (b) sensor selection through structural equations for large complex systems.
1.1. Empirical Sensor Selection Process
A graphical toolset for sensor selection using 2D performance charts has been proposed [
8]. This process focuses on collecting and defining the sensor characteristics for each sensor type from the manufacturers’ datasheets. The collected information is then plotted on two-dimensional charts, with sensor performance indices as the axes. These performance charts illustrate various trade-offs; for example, resolution vs. range or frequency vs. range. Only the common elements corresponding to a type of sensor listed on the manufacturers’ technical specifications are used for the performance charts. The strongest sensor candidates are identified from the charts. A subset of the sensor candidates is then selected after accounting for cost, practicality and reliability. According to the authors, this method gives an overview of sensor performance thus graphically illustrating the sensors best suited for a given task. Although this method acts as a straightforward visual selection tool, it is not scalable. Unstructured and variable outcomes result due to the lack of a systematic method to guide the designers in the pairing of attributes within the performance chart.
Schmidt and Laerhoven [
9] proposed a semantic approach to sensor selection in the context of building a smart appliance. The approach begins with the analysis of the conditions of the informational, physical and social environment in which the appliance is used or interacted with. Situations that are similar for the device are grouped in a single context that is labeled. Variables such as time interval, temperature, value, number of people in the vicinity, etc. that help discriminate the contexts are identified. Based on the variables identified, sensors are selected while accounting for the accuracy and cost of the sensors. The selection begins all over if the sensors do not perform well in the lab setting with a prototype of the device. This is time-consuming and an inefficient approach for sensor selection. A similar context-aware approach to sensor selection using the dynamic skyline technique is proposed by Kertiou et al. [
10]. The dynamic skyline technique is utilized to reduce the search space and select the best sensors following user requirements. According to the authors, this method can be adopted by different IoT middleware for designing relevant solutions with a high level of accuracy and minimize the search and selection time. To counter the slow-acting dynamic skyline technique and to make it scalable the authors propose the use of distributed gateways connected to a server, each gateway responding to a local request by the user.
A novel sensor selection algorithm utilizing the concept of entropy and information gain from information theory is proposed by Tjen, Smarra and D’Innocenzo [
11] for structural damage detection. The main idea is to choose a sensor from each pair of sensors such that the information gain is maximized. The authors use a Principal Component Analysis-based metric to achieve a trade-off between prediction accuracy and computational complexity. Zhang, Ayoub and Sundaram [
12] show that greedy algorithms are optimal for estimating the states for a certain class of linear dynamical systems. Along with budget constraints, they consider the objective of minimizing the trace of the steady-state a priori or a posteriori error covariance produced by a Kalman filter. The authors also provide proof that even under the assumption of a stable system, a priori and a posteriori error covariance-based sensor selection problems are NP-hard. The authors also demonstrate that certain objective functions are not submodular or supermodular in general which makes it difficult to evaluate the performance of greedy algorithms in theory. Through simulations, the performance of the proposed greedy algorithms is illustrated. A similar greedy algorithm approach is proposed by Clark, Brunton and Kutz [
13] to approximate the number of economic and expensive sensors in an environment or state space. The authors evaluate the composition of both types of sensors along with their placement to assess their ability to reconstruct a higher dimensional state space. The preliminary sensor positions are obtained through QR-decomposition. The sensor noise levels, sensor cost, total budget and the single value spectrum of the data measured play a significant role in selecting the number of sensors. The sensor recommendations are based on the computational results of asymptomatic regions of parameter space.
A three-sieve sensor selection method is proposed by Jones et al. [
14] which takes into account performance requirements, environmental constraints and economic considerations. This method starts with an analysis of the system. The candidate sensors are assessed for specific requirements from the operators and the final decision is based on the cost of the sensors. This method, however, is meant specifically for experimental setup and small systems. This method can be used to consider homogenous sensors and the comparison can be made only with similar sensors.
1.2. Sensor Selection through Linear and Non-Linear Equation
To guide the sensor selection process in highly complex systems with a large number of interacting parameters, modeling tools and software may be needed. The Drexel University Intelligent Infrastructure Institute proposed a sensor selection methodology for bridge health monitoring [
15]. The first step in the process is to analyze the bridge and its surroundings as well as the environment in which the sensors are needed to be deployed. Based on the analysis a candidate set of sensors are selected in consideration of performance characteristics, environmental constraints and cost. Zhang and Vachtsevanos [
16] proposed a methodology to decide the type, number and location of sensors. A novel graph-based technique called quantified-directed-model for fault propagation from subsystems to subsystems in a large complex system is presented. The authors quantify the fault detectability metric via signal-to-noise ratio, time-to-detection to the time-to-failure ratio, sensitivity of a sensor and symptom duration to time-to-failure ratio. These, along with cost as the objectives, are modeled and optimized using particle swarm optimization. The performance of the proposed method is tested on a five-tank system.
A knowledge-based selection of sensors and actuators for plant equipment was proposed by Riedel, Arroyo and Fay [
17]. The authors argue that selection decisions are taken one device at a time, which is time-consuming and results in suboptimal solutions. To overcome this limitation the proposed method presents a concept based on plant description and semantic models. The paper states that this function-oriented selection process is capable of considering a wider solution space as well as seamless integration of this procedure into plant workflow. L. Santi’s’ [
6] a systematic sensor selection (S4) policy for aerospace vehicle design forms the basis for most sensor selection processes. The proposed method supports the selection of sensors adapted to a system in a particular situation. After establishing constraints through a computer-assisted analysis, sensor selection is carried out via a process of iterative optimization. The proposed method addresses a complex situation that needs a large number of interacting sensors. This method is also utilized for boost stage rocket engines, turbo-fan engine diagnostics, and aircraft engine health estimation [
18,
19,
20]. A sensor selection based on the physical model and sensitivity analysis for a helicopter transmission system is proposed by Lyu et al. [
21]. The first step in the proposed method builds a physical model of the gear tooth damage and mesh stiffness. In the next step, effective condition indicators (CI) are presented and the optimal CI set is selected via the Mann-Kendall test. The selected optimal CI is used to develop a health indicator through the sen slope estimator. Based on the monotonic relevance and sensitivity to damage levels sensors are selected. The selected approach is validated by simulation. The authors state that the proposed approach effectively reduces the test cost and improves the system’s reliability. The proposed methods require knowledge of advanced modeling software and algorithms which can time consuming and expensive to implement making it viable only for large complex systems.
Based on sensitivity analysis and the capability of the sensors in predicting the polymer electrolyte membrane (PEM) fuel cell performance sensor selection algorithms such as the largest gap method and exhaustive brute force search are explored by Mao and Jackson [
22]. A sensitivity matrix related to sensor measurements and fuel cell health parameters is generated using a fuel cell model. The sensitivity matrix is used as the input for the sensor selection algorithms proposed in the paper. The authors demonstrate that accurate prediction can be obtained with optimal sensors. A sensor selection algorithm for PEM fuel cells considering sensor sensitivity, fuel cell performance and resistance to noise is proposed by Mao, Davies and Jackson [
23]. The sensitivity of the sensors is calculated via a fuel cell model and the sensitivity to different failure modes is then ranked. The performance of the selected sensors is evaluated via an adaptive neuro-fuzzy inference system (ANFIS). The proposed methods are focused mainly on the health of PEM fuel cells; it is not suitable to be used as a general tool for sensor selection.
A comprehensive evaluation method of sensor selection for PHM based on grey clustering for an electronic control system of radar was proposed by Guan et al. [
24]. The first step in the proposed approach is to define and quantify three grey indexes based on the dependency matrix and classify the sensors into grey classes. The next step is to utilize the whitening weight function in consideration of the objective and subjective tendency to improve the effectiveness of the result. The final step in the process is to cluster the sensors by analyzing the clustering coefficient calculated based on grey clustering theory.
The most commonly used sensors for predictive maintenance of industrial motors are listed by Murphy [
25]. The report summarizes the advantages and disadvantages of various sensors and when to use sensors for health monitoring. It also acts as a guide for parameters that need to be sensed/measured for predictive maintenance. However, beyond simple comparison, it does not provide a method for selecting the sensors. Summary of the literature review is shown in
Table 1.
Based on the literature review the following conclusions can be drawn. First, the sensor selection process regardless of the application technology always begins with the analysis of the system and its failure modes. Second, the selected sensors need to be compared with the specific system and environmental constraints. Third, the sensor selection tools developed in the literature for both classes of the sensor selection process are not interchangeable. Finally, the cost considerations are taken into account after considering the technical constraints. Additionally, the methods proposed are not usable if the practitioner is not well versed in semantic processes or complex selection algorithms.
2. An Ordered Fuzzy Clustering Approach to Sensor Selection
This section introduces the OFCCaTS (Ordered Fuzzy C-means Clustering and Two Sieve) methodology for sensor selection. This includes an overview of the methodology as well as details for each of its core components. The proposed sensor selection process integrates the features of a typical sensor selection process and facilitates making a final decision based on the system requirements. The selection process starts with the analysis of the system and assesses the sensor needs for condition monitoring and allows for the selection of the sensor right down to the specification of the sensor. The few key steps that set this sensor selection process apart are the utilization of constraints that are general to most engineered systems while also catering to the specific needs of each system with the integration of the two-sieve method. Sensors are considered clustering objects. A fault-sensor dependency matrix is created. To design an effective PHM system, the following parameters are considered: fault detection probability, fault tolerance, sensor value and fault detection time. To estimate some of these parameters, a few common assumptions are made. The first assumption is that all the sensor data are forward to a central data processing unit. This is a simple and convenient assumption as it does not require the use of any distributed computing algorithms for statistical computation. The second assumption is that the data received by the fusion center are not corrupted by any communication fault. The final assumption is that the data fusion center indicates whether the operational condition of the system is healthy or abnormal. The definitions of the parameters considered are provided below.
2.1. Fault Sensor Dependency Matrix
Fault-sensor mapping matrix is a diagnostic model utilized to catch the fault data and its causal relationship at the hierarchical system level [
26]. It typically consists of the dependency relationship between observable failure modes and symptoms associated with a system. The fault dependency matrix is modified to reflect the relationship between the fault modes and the sensors, as the fault diagnosis here depends largely on the information collected by the sensors. A matrix
denotes the system fault-sensor dependency matrix. If a sensor
can detect the fault
, element
= 1; otherwise,
= 0. The fault-sensor mapping matrix is shown below:
The parameters considered below will be used to form the clustering object, which will be used as the input for the clustering algorithm.
2.1.1. Likelihood Estimation
The fault-sensor mapping matrix approximately describes the simple matched relationship between fault modes and sensor set. In
Table 2,
= 1 indicates that the sensor can detect the fault
with a probability of 1. Due to sensor reliability and complex environmental factors, a sensor may not detect a fault with absolute certainty. The fault detection probability for each sensor is obtained via MCMC (Markov Chain Monte Carlo) simulation in python-3.
2.1.2. Sensor Value Estimation
Cost is always a factor while designing any system; the same holds for PHM systems as well. To evaluate the cost of sensors usually purchase cost, installation cost, data processing cost and the sensor usage cost is considered. However, this does not accurately reflect the sensor value. To calculate the sensor value, the following parameters are considered:
2.1.3. Fault Tolerance
The reliability of a sensor after a fault has occurred is defined as fault tolerance. It is difficult to replace the sensors when they operate in extreme environmental conditions or remote places such as space. Fault tolerance depends on the application in which the sensors are deployed. Given a set of sensors
K, the reliability of the sensors
R(
K,
t) is defined as the probability that no sensor in
K fails during the interval (0,
t). If sensor failures are independent, one has:
where
Rk(
t) is the reliability of sensor
k. The reliability of the sensors is modeled as a Poisson distribution:
where
λk is the failure rate of sensor
k, typically considered to be constant under steady-state conditions. According to reliability engineering, the sum of reliability and unreliability of any component or system should be 1. Therefore, the unreliability or the probability of failure of the sensors is given by
2.1.4. The Proportion of Fault Detection
The proportion of fault detection is defined as the ratio of the number of faults a sensor can detect to all the faults under consideration. This metric considers the proportion of faults that can be detected by the sensors. If a sensor can detect all the faults under consideration, then the value is 1. However, in reality, no one sensor can detect all the failures, and therefore the value lies between 0 and 1. The proportion of fault detection is given by the following equation.
where,
is the fault ‘
i’ that is detected by sensor ‘
j’.
is the total number of faults under consideration.
2.1.5. Criticality Term
Criticality is a term that was introduced by Reeves [
27]. This method considers the effect of the failures that can be detected by the sensors on the system. It is based on the Fussell-Vesely importance measure. The importance measure considers the failure’s contribution towards the unavailability of the system.
The criticality term is measured by subtracting the probability of system failure given that the sensor does not detect the critical failure. It is given by the following equation:
where
Qsys is the probability of system failure
Qsys(
qs = 0) is the probability of system failure given that the sensor does not detect the failure.
The value of the criticality term is 1 if a sensor can detect all the failures and 0 if it cannot. From the considered set of failures, only a few of the failures are considered critical failures and are marked as such. The critical failures are identified based on the method proposed by Konstantinidis, Katsavounis and Botsaris [
28].
2.2. Ordered Fuzzy C-Means Clustering with PROMETHEE Algorithm
The analysis for sensor selection presented in this paper is based on the Ordered Fuzzy C-means clustering (OFCM) algorithm combined with the preference ranking organization method for enrichment evaluation (PROMETHEE) proposed by Bai et al. [
29]. This method was developed to overcome the shortcoming of traditional clustering algorithms in which the clusters have little to no relation with one another, and the weight of each criterion is not considered. The classic fuzzy c-means clustering algorithm typically utilizes Euclidean norm for similarity measure between objects, which does not consider the relative importance of the criteria under consideration. The PROMETHEE method considers the difference between the criteria as well as the priority degree for each pair of objects. It is an efficient method for the pairwise comparison of a given set of alternatives. However, the algorithm alone does not provide the specifications for each type of sensor selected. This is achieved by utilizing a method called three-sieve sensor selection, proposed in [
14].
Given a set of alternatives A = {a1, a2, …, an} and a set of criteria G = {g1, g2, …, gn}, an ordered partition of A should satisfy the following three conditions:
where
Ci denotes the
ith order cluster and
C1 is considered as the best cluster. Similar to the classic Fuzzy Clustering Method, the authors define a new objective, shown in (9):
where
ϑi represents the fuzzy centroid of the
ith order cluster,
ϕ (
aj) is the net outranking flow and
is the fuzzy membership. The following steps need to be taken to implement the algorithm.
| Algorithm. OFFCATS |
Determine the difference denoted as dk ( ai, aj) between the evaluation of ai and aj with respect to the criterion gk:
Transform the difference dk ( ai, aj) into a single criterion using a preference function Pk ( ai, aj) for each criterion gk:
where fk (.) is a monotonically non-decreasing function varying between 0 and 1, i.e., greater the value higher the preference to ai over aj based on the criterion gk. Compute the preference degree by aggregating all the single criterion preference function in the form of a weighted sum:
Calculate the positive and the negative net outranking flow:
The positive outranking flow denotes the extent to which the alternative is preferred to the other alternatives. The larger the value, the better the alternative and vice versa when it comes to the negative outranking flow Compute the net outranking flow which represents the total priority of over all the other alternatives.
If , then is the absolute best alternative; if the net outranking flow of two alternatives is the same, then both alternatives are equal.
Set c = 2 and randomly initialize of belonging to cluster i.
Calculate the fuzzy centroid Rank the cluster according to the fuzzy centroid ( of each cluster. For example, if then Update based on (17):
Repeat steps 8 and 9 until the value of in (9) has only negligible changes. Calculate and . Then, let c = c + 1. If (stop value), stop; otherwise return to step 6, where the stop value will reach optimal value at n/2.
|
2.3. Two-Sieve Sensor Specification Selection Method
After selecting the type of sensors, to identify the specification of the sensors to be placed, two-sieve sensor selection is utilized. A three-step analysis method feeds into a selection tool that can be adapted to nearly any IoT system or situation. The proposed method is a modified version of the selection process that was proposed by Jones et al. [
14]. Incorporating these two methods together makes it easier for the decision-maker to identify the specification of the sensor that needs to be purchased. The sensor performance data is obtained from the sensor manufacturer’s datasheet, which feeds into the three-step analysis. The results are used to populate a two-sieve selection tool, represented as a succession of color-coded matrices. Each sieve provides a simple go/no go decision for each sensor based on the constraints. The number of candidate sensors is reduced progressively. After the final matrix is obtained, the sensor with the highest aggregate score is chosen.
Three-Step Analysis
A relevant set of candidate sensors can be selected only after understanding the system and its fault as a whole. The three-step analysis aids in the practitioners’ effort in understanding the system.
The three-step analysis not only provides an in-depth understanding of the processes occurring within the system but also aids in the identification of parameters for measurement. The performance requirements, derived from the three-step analysis, are used in the two-sieve tool show to identify the appropriate set of sensors. A spreadsheet template utilized for sensor selection for the three-sieve sensor selection method is provided in [
14]. As OFFCATS considers the criteria for sensor selection this negates the need for a three-sieve selection process. While the first will help us identify the specification of the sensor, the second sieve will help us identify the environmental and stock requirements of the sensor.
3. Results
To demonstrate the effectiveness and the scalability of the framework, a wind turbine gearbox is considered for the following reasons. First, the wind turbine gearbox is simultaneously the most troublesome and the most critical system in a wind turbine. Second, the gearbox failures are generic and independent of the manufacturer. Finally, downtime due to gearbox failures takes an average of 256 h to repair and 20% of the downtime is due to gearbox failures [
30]. The basic faults under consideration and fault occurring rate for wind turbine gearbox with sensors used to detect the associated faults are provided in
Table 3. The corresponding sensors for each failure mode are identified and the sensor selection algorithm will provide the type and number of sensors. The sensors used to detect the failures and the associated parameters are provided in
Table 4.
A gearbox is used to convert the slow rotational speed of the rotor blades of around 30 rpm to acceptable rotational speeds of 1000–1800 rpm via a high-speed shaft. It typically consists of a lubrication system, a combination of planetary gears and parallel gears held in mesh with axial and radial supporting bearings. The transformation from the low-speed stage is typically done in several stages for stepwise alteration of speed. Each of the stages usually has a ratio of about 1:4–1:5. The gears in wind turbines deal with partial loads, variable speeds, and dynamic torques due to wind speed turbulence. This puts severe stress on the gears and the bearings inside the system. Due to the friction between the surfaces, small metal particles drop in the lubricant, which is a wear-out process known as micro-pitting.
The early failures and long downtime of a gearbox make the design, construction and maintenance of wind turbines a challenge to the renewable energy industry. Although designed to achieve a lifetime of 20 years, the gearbox falls short of the lifetime by 5−7 years. Due to its massive size, the repair and replacement of gearbox components are difficult to handle. The involvement of support ships and cranes in repairing offshore wind turbines creates its own set of issues. Only a few of the wind turbine failures can be rectified on site. To repair the gearbox failures, the entire sub-system needs to be removed from the turbine with significant cost and downtime. About 38% of the total cost of replacement of the components is from the gearbox. A typical gearbox replacement costs about
$300K–
$775K including the rental equipment and labor costs [
31].
OFCCaTS
This section illustrates how to utilize OFCM for sensor selection. The complete list of sensors that need to be selected, as well as their associated criteria, are provided in
Table 5. The complete list of sensors and the associated criteria for sensor selections is provided in
Table 4. The fault detection likelihood of the sensors for all the faults can be seen in
Appendix A. For sensor selection, the maximum likelihood of each sensor is selected regardless of the number of faults detected by the sensors. Let
S = {
sj|
j = 1, 2, …,
n} be the set of sensors.
The step-by-step procedure for clustering based on Algorithm is given as follows:
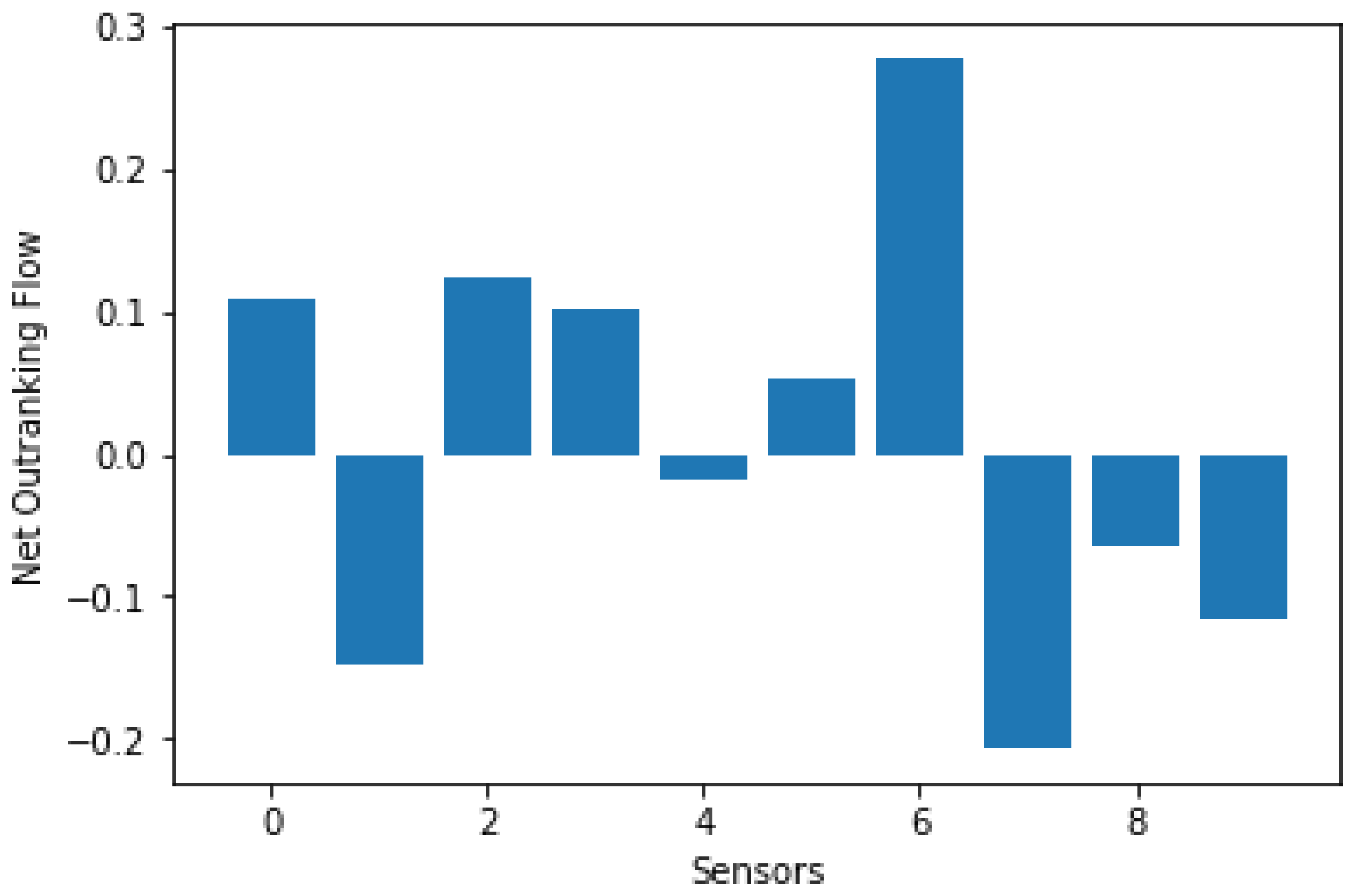
The preference degrees are computed between each pair of sensors and then the net outranking flow of each sensor is calculated. For each criterion, the Gaussian preference function shown in Equation (18) is utilized.
where the equal weights are assigned for each preference criteria and only the parameter ‘
s’ needs to be fixed. The value of ‘
s’ lies between the threshold of indifference (below which there is no preference to either of the actions) and the threshold of absolute preference (above which there is a total preference to one of the two actions) shown in
Table 6.
The preference degree of each sensor is then obtained and
is calculated using Equation (15). The net outranking flow for each sensor is shown in
Figure 2 and the net outranking flow for each criterion is shown in
Table 7. Then, set the number of clusters to be 2. (
c = 2).
- 2.
Randomly initialize the memberships of of belonging to cluster ‘i’.
- 3.
The fuzzy centroid for each cluster is calculated using equation 16. Let the fuzziness parameter be set to 2.
- 4.
Rank the clusters according to the fuzzy centroid . Thus, we can obtain C1 and C2.
- 5.
Update the value of based on equation 17.
- 6.
Repeat Steps 3 and 4 until , where ‘t’ denotes the iteration and is the absolute difference between J1t and J1t−1.
- 7.
Compute Jm. Then, let c = c+1, stop when the number of clusters c = 10/2 5, otherwise return to step 2.
- 8.
Select the number of clusters with the minimum value of ‘Jm’ and defuzzify the memberships
In
Table 8 the membership value of each sensor for a given cluster is shown. Considering
the sensors belonging to cluster
are selected. The next step in the process is to proceed with the two-sieve method to identify the specification for the chosen sensors. At least three different alternatives for each sensor are chosen. The specification data for each sensor are obtained through the
https://www.digikey.com, website last accessed on 2 April 2021.
The two-sieve method provides the specifications of the sensors and provides a method to compare different sensor specifications with that of the system information. System information is converted to constraints and entered into the table as shown in
Table 9An example of oil particle counters from different sensor providers is shown in
Table 9. In the example shown below, the color codes are keyed to scores: red = 0, yellow = 1, and green = 2. The total score in each sieve is calculated by multiplying the scores of each constraint. In the first sieve, the sensors with scores more than 0 are filtered out. In the second sieve, the scores are calculated by multiplying the scores of the first sieve with that of the total score of the second sieve, and the sensor with the maximum score is selected. In this case, the ‘Filtertechnik PC9001′ is selected.
This process is repeated for all the other types of sensors that are selected. In the two-sieve method the scores do not reflect the sensor performance in the long run nor do they indicate the superiority of any sensor over another.
4. Conclusions
In this paper, a sensor selection framework for designing a fault diagnostic system has been presented. A case study based on the gearbox subsystem of a wind turbine is provided to demonstrate the OFCCaTS methodology, utilizing a fuzzy clustering method with preference ranking that has been established based on the wind turbine gearbox fault history data and expert experience. The constraints and metric proposed in the graphical method proposed in this paper generate two 2D graphs. No candidates are discarded between the graphs so that analysis is performed with simultaneous comparison of multiple graphs. Further, while most sensor selection processes become unmanageably complex given a large system, the proposed process is scalable and generalizable to any size system. In contrast to the complex, and sometimes specialized approaches, the proposed sensor selection process offers a more general and easily adaptable approach.
In the case of an extremely large system, the proposed method is scalable until the OFCM step, where the two-sieve method becomes time-consuming and extremely inefficient. Future work will investigate extending the process to automate the two-sieve step of the proposed sensor selection method such that the decision-maker is provided with a list of sensors with associated specifications.




{kind=link}
{kind=link}

