
Design and Implementation of Morphed Multi-Rotor Vehicles with Real-Time Obstacle Detection and Sensing System


 , and
, and
Abstract
:1. Introduction
2. Mechanical Design
2.1. Kinematic Modelling
2.1.1. Forward Kinematics of the Folding Arm
Modelling the Folding Mechanism
3. Modeling of Quadrotor UAV
4. Simulation Analysis of Morphed Configuration
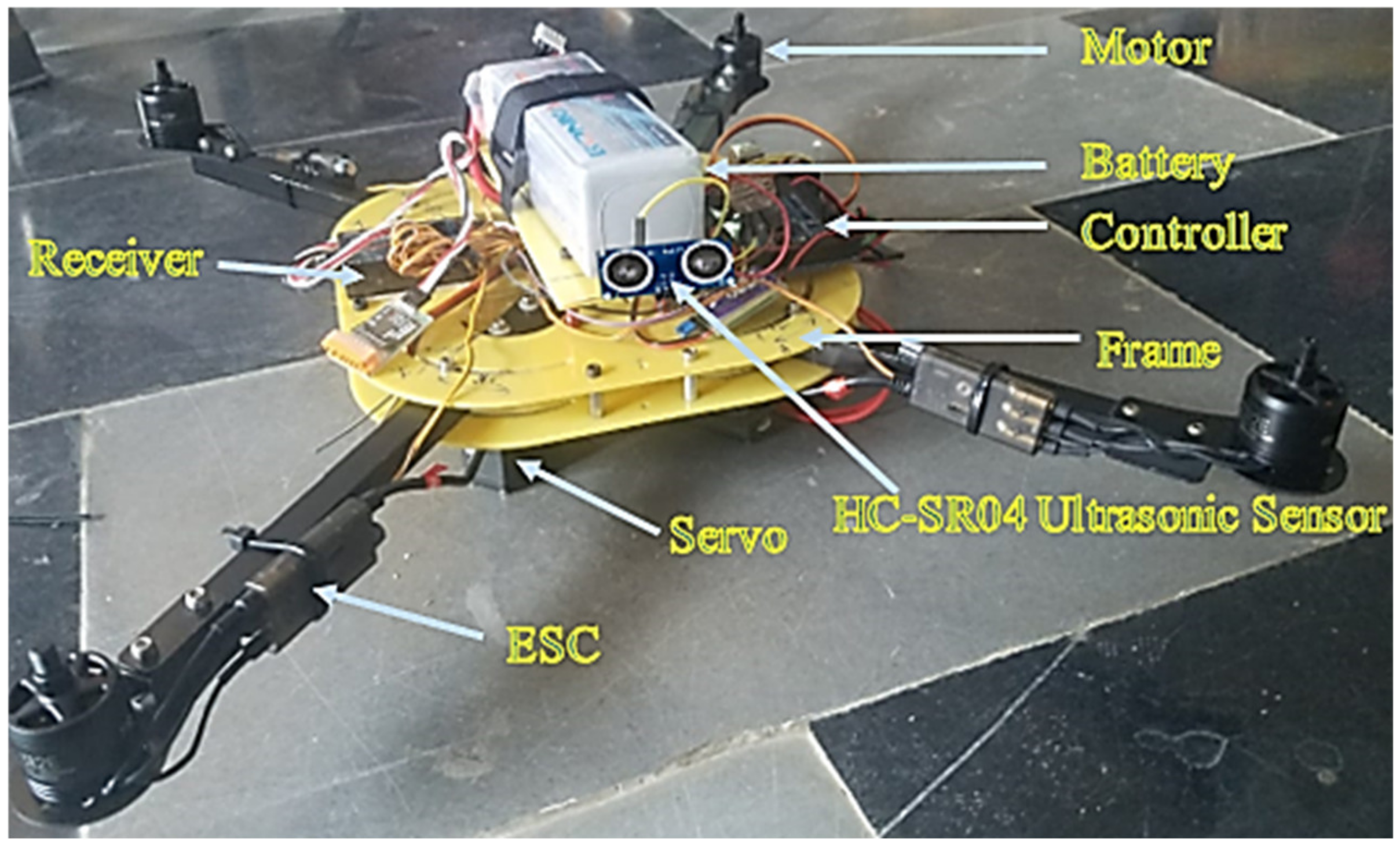
5. Hardware Specification and Construction of Morphed MUAV
6. Experimental Analysis
6.1. Synchronous Folding and Un-Folding
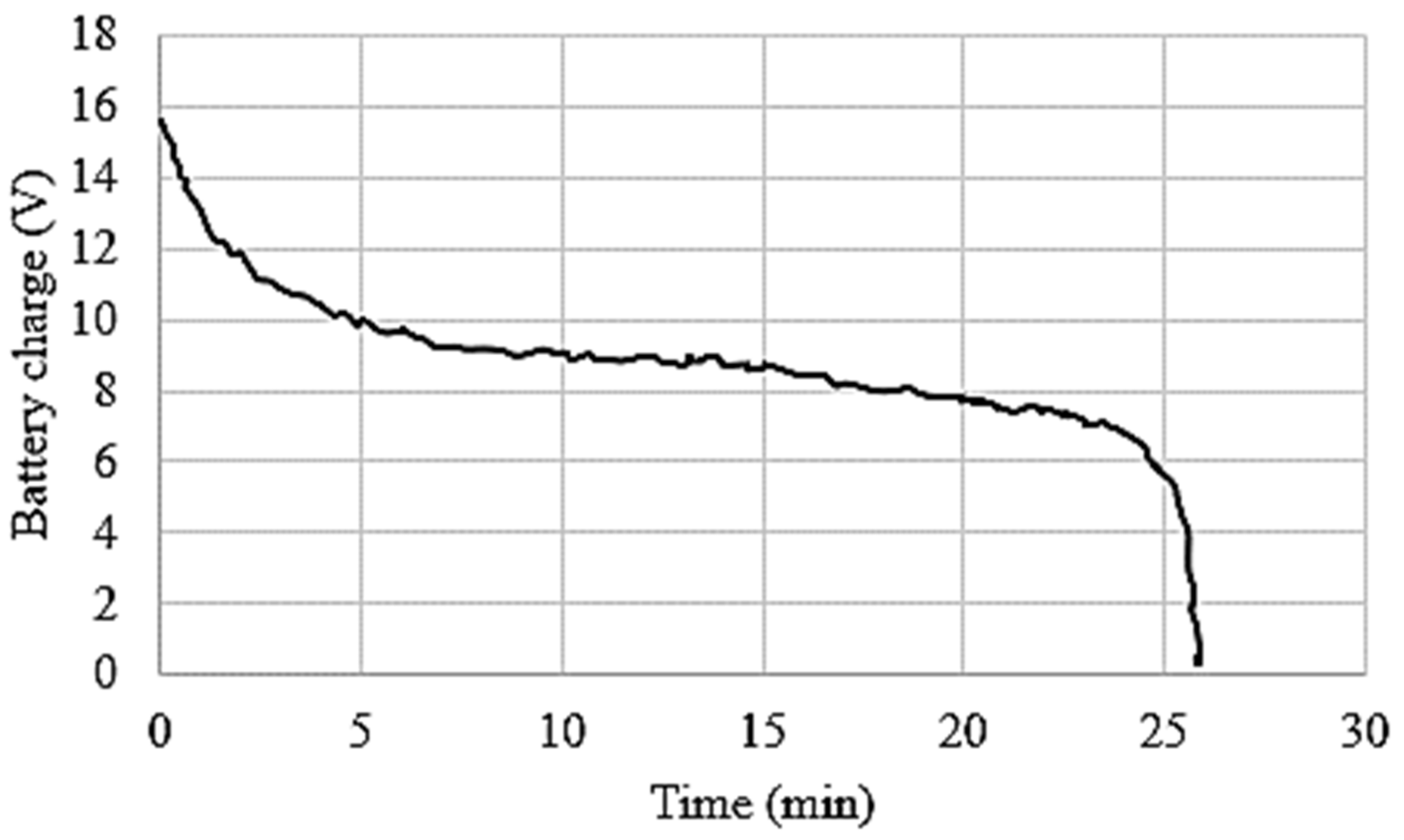
6.2. Power Consumption and Flight Endurance
6.3. Experimental Testing of the Morphing Phenomenon Using Obstacle Avoidance Algorithm
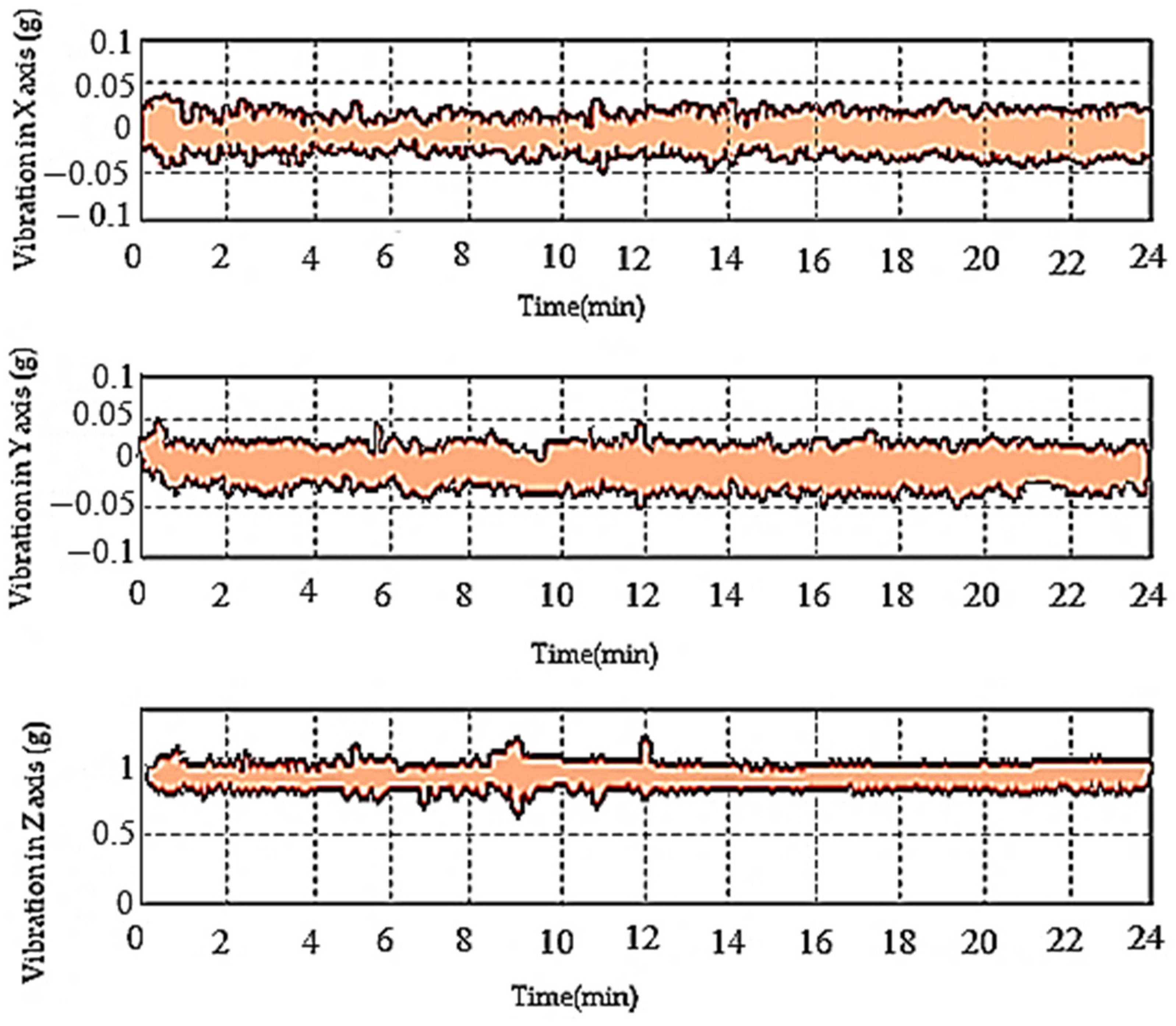
6.4. Vibration Measurement
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nat. Cell Biol. 2015, 521, 460–466. [Google Scholar] [CrossRef] [Green Version]
- Qadir, Z.; Ullah, F.; Munawar, H.S.; Al-Turjman, F. Addressing disasters in smart cities through UAVs path planning and 5G communications: A systematic review. Comput. Commun. 2021, 168, 114–135. [Google Scholar] [CrossRef]
- Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of amphibious vehicle for unmanned mission in water quality monitoring using internet of things. Sensors 2018, 18, 3318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esakki, B.; Mathiyazhagan, S.; Moses, M.; Rao, K.J.; Ganesan, S. Development of 3D-printed floating Quadrotor for collection of algae in remote water bodies. Comput. Electron. Agric. 2019, 164, 104891. [Google Scholar] [CrossRef]
- Mintchev, S.; Shintake, J.; Floreano, D. Bioinspired dual-stiffness origami. Sci. Robot. 2018, 3, 275. [Google Scholar] [CrossRef] [Green Version]
- Harvey, C.; Baliga, V.B.; Lavoie, P.; Altshuler, D.L. Wing morphing allows gulls to modulate static pitch stability during gliding. J. R. Soc. Interface 2019, 16, 20180641. [Google Scholar] [CrossRef]
- Lentink, D.; Müller, U.K.; Stamhuis, E.J.; de Kat, R.; van Gestel, W.; Veldhuis, L.L.M.; Henningsson, P.; Hedenström, A.; Videler, J.J.; van Leeuwen, J.L. How swifts control their glide performance with morphing wings. Nat. Cell Biol. 2007, 446, 1082–1085. [Google Scholar]
- Pennycuick, C.J. A Wind-Tunnel Study of Gliding Flight in the Pigeon Columba Livia. J. Exp. Biol. 1968, 49, 509–526. [Google Scholar] [CrossRef]
- Williams, C.D.; Biewener, A.A. Pigeons trade efficiency for stability in response to level of challenge during confined flight. Proc. Natl. Acad. Sci. USA 2015, 112, 3392–3396. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shah, D.; Yang, B.; Kriegman, S.; Levin, M.; Bongard, J.; Kramer-Bottiglio, R. Shape-Changing Robots: Shape Changing Robots: Bioinspiration, Simulation, and Physical Realization. Adv. Mater. 2021, 33, 2002882. [Google Scholar] [CrossRef]
- Riviere, V.; Manecy, A.; Viollet, S. Agile Robotic Fliers: A Morphing-Based Approach. Soft Robot. 2018, 5, 541–553. [Google Scholar] [CrossRef] [PubMed]
- Falanga, D.; Kleber, K.; Mintchev, S.; Floreano, D.; Scaramuzza, D. The Foldable Drone: A Morphing Quadrotor That Can Squeeze and Fly. IEEE Robot. Autom. Lett. 2019, 4, 209–216. [Google Scholar] [CrossRef] [Green Version]
- Tuna, T.; Ovur, S.E.; Gokbel, E.; Kumbasar, T. FOLLY: A Self Foldable and Self Deployable Autonomous Quadcopter. In Proceedings of the 6th International Conference on Control Engineering & Information Technology (CEIT), Istanbul, Turkey, 25–27 October 2018; pp. 1–6. [Google Scholar]
- Kamel, M.; Verling, S.; Elkhatib, O.; Sprecher, C.; Wulkop, P.; Taylor, Z.J.; Siegwart, R.; Gilitschenski, I. The Voliro Omniorientational Hexacopter: An Agile and Maneuverable Tiltable-Rotor Aerial Vehicle. IEEE Robot. Autom. Mag. 2018, 25, 34–44. [Google Scholar] [CrossRef] [Green Version]
- Brescianini, D.; D’Andrea, R. Design, modeling and control of an omni-directional aerial vehicle. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Switzerland, 16–21 May 2016; pp. 3261–3266. [Google Scholar]
- Ryll, M.; Bülthoff, H.H.; Giordano, P.R. A novel overactuated quadrotor unmanned aerial vehicle: Modeling, control, and experimental validation. IEEE Trans. Control. Syst. Technol. 2014, 23, 540–556. [Google Scholar] [CrossRef] [Green Version]
- Zhao, M.; Kawasaki, K.; Chen, X.; Noda, S.; Okada, K.; Inaba, M. Whole-body aerial manipulation by transformable multirotor with two-dimensional multilinks. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5175–5182. [Google Scholar]
- Wallace, D.A. Dynamics and Control of a Quadrotor with Active Geometric Morphing. Ph.D. Thesis, University of Washington, Washington, DC, USA, 2016. [Google Scholar]
- Zhao, N.; Luo, Y.; Deng, H.; Shen, Y. The deformable quad-rotor: Design, kinematics and dynamics characterization, and flight performance validation. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2391–2396. [Google Scholar]
- Mintchev, S.; Floreano, D. Adaptive morphology: A design principle for multimodal and multifunctional robots. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Switzerland, 16–21 May 2016. [Google Scholar]
- Yang, D.; Mishra, S.; Aukes, D.M.; Zhang, W. Design, Planning, and Control of an Origami-inspired Foldable Quadrotor. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 2551–2556. [Google Scholar]
- Hintz, C.; Torno, C.; Carrillo, L.R.G. Design and dynamic modeling of a rotary wing aircraft with morphing capabilities. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 492–498. [Google Scholar]
- Bucki, N.; Mueller, M.W. Design and control of a passively morphing quadcopter. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9116–9122. [Google Scholar]
- Xiu, H.; Xu, T.; Jones, A.H.; Wei, G.; Ren, L. A reconfigurable quadcopter with foldable rotor arms and a deployable carrier. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1412–1417. [Google Scholar]
- Yang, T.; Zhang, Y.; Li, P.; Shen, Y.; Liu, Y.; Chen, H. Sniae-sse deformation mechanism enabled scalable multicopter: Design, modeling and flight performance validation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 864–870. [Google Scholar]
- Tothong, T.; Samawi, J.; Govalkar, A.; George, K. Morphing Quadcopters: A Comparison Between Proposed and Prominent Foldable Quadcopters. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 589–596. [Google Scholar]
- Balasubramanian, E.; Sagar, N.V.; Chandrasekhar, U.; Salunkhe, S. Development of light weight multi-rotor UAV structures through synergistic application of design analysis and fused deposition modelling. Int. J. Mater. Prod. Technol. 2019, 59, 229–238. [Google Scholar] [CrossRef]
- Zhao, N.; Yang, W.; Peng, C.; Wang, G.; Shen, Y. Comparative Validation Study on Bioinspired Morphology-Adaptation Flight Performance of a Morphing Quad-Rotor. In Proceedings of the 2021 IEEE Robotics and Automation Letters, Xi’an, China, 30 May–5 June 2021; pp. 5145–5152. [Google Scholar]
- Ajanic, E.; Feroskhan, M.; Mintchev, S.; Noca, F.; Floreano, D. Bioinspired wing and tail morphing extends drone flight capabilities. Sci. Robot. 2020, 5, 2897. [Google Scholar] [CrossRef] [PubMed]
- Usherwood, J.R.; Cheney, J.A.; Song, J.; Windsor, S.P.; Stevenson, J.P.J.; Dierksheide, U.; Nila, A.; Bomphrey, R.J. High aerodynamic lift from the tail reduces drag in gliding raptors. J. Exp. Biol. 2020, 223, 214809. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, E.; Matloff, L.Y.; Stowers, A.K.; Lentink, D. Soft biohybrid morphing wings with feathers underactuated by wrist and finger motion. Sci. Robot. 2020, 5, 1246. [Google Scholar] [CrossRef] [PubMed]
- Fabris, A.; Kleber, K.; Falanga, D.; Scaramuzza, D. Geometry-aware compensation scheme for morphing drones. arXiv 2020, arXiv:2003.03929. [Google Scholar]
- Kose, O.; Oktay, T. Simultaneous quadrotor autopilot system and collective morphing system design. Aircr. Eng. Aerosp. Technol. 2020, 92, 1093–1100. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust Integral Terminal Sliding Mode Control for Quadrotor UAV with External Disturbances. Int. J. Aerosp. Eng. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Wong, W.-K. Adaptive Terminal Sliding Mode Control for Attitude and Position Tracking Control of Quadrotor UAVs in the Existence of External Disturbance. IEEE Access 2021, 9, 3428–3440. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Adaptive finite-time back-stepping global sliding mode tracker of quad-rotor UAVs under model uncertainty, wind perturbation and input saturation. IEEE Trans. Aerosp. Electron. Syst. 2021. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Zhang, C.; Esakki, B. Desired tracking of delayed quadrotor UAV under model uncertainty and wind disturbance using adaptive super-twisting terminal sliding mode control. ISA Trans. 2021. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison Criteria | Developed Morphed MUAV | Custom MUAV |
|---|---|---|
| Percentage Reduction in volume | 60% reduction in Horizontal space | No space reduction |
| Obstacle avoidance | Yes | No |
| Reconfigurable | Yes | No |
| Intrusion in narrow environment | Yes | No |
| Adapt to different tasks or environments by altering their shapes | Yes | No |
| Configuration | Arm Length | Folding Ratio | ||
|---|---|---|---|---|
| LH | LV | ηH | ηV | |
| Unfolded (= 0) | 553 mm | 563 mm | 100% | 100% |
| Folded () | 220 mm | 702 mm | 40% | 125% |
| Characteristics | Value | |
|---|---|---|
| Stall Torque (Nm) | 0.92 (@4.8 V) | 1.078 (@6 V) |
| Maximum Idle Angular Velocity (deg/s) | 315.8 (@4.8 V) | 400 (@6 V) |
| Instantaneous Current Drawn (mA) | 100 | 120 |
| Weight | 1.5 kg |
|---|---|
| Arm length | 220 mm |
| Propellor diameter | 101.6 mm |
| Object detection | Front |
| Object detection range | 20 mm–4000 mm |
| Flight time | 26 min |
| Actuators | 2300 kv Brushless DC Motors ESC 30 A TowerPro MG996R gear servo motor |
| Sensors | HC-SR04 Ultrasonic Sensor 20 mm–4000 mm QMC5883L Magnetometer Ublox NEO-M8 Global Positioning System MPU6000 6 Axis SPI Gyroscope + Accelerometer BMP280 Barometer |
| Controller | Arduino Nano Atmega358–3.3 V/16 MHz Pixhawk PX4 Flight Controller |
| Power | 5700 mAh 11.1 V Li-PO Battery Energy ~ 76.9 Wh |
| Sl. No | Parameters | Developed Morphed UAV | Existing Morphed UAV |
|---|---|---|---|
| 1 | Power consumption | 180.5 W | 185.7 W |
| 2 | Endurance (5700 mAh) | 26 min | 24 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shiferaw, A.Y.; Esakki, B.; Pari, T.; Elumalai, E.; Mobayen, S.; Bartoszewicz, A. Design and Implementation of Morphed Multi-Rotor Vehicles with Real-Time Obstacle Detection and Sensing System. Sensors 2021, 21, 6192. https://doi.org/10.3390/s21186192
Shiferaw AY, Esakki B, Pari T, Elumalai E, Mobayen S, Bartoszewicz A. Design and Implementation of Morphed Multi-Rotor Vehicles with Real-Time Obstacle Detection and Sensing System. Sensors. 2021; 21(18):6192. https://doi.org/10.3390/s21186192
Chicago/Turabian StyleShiferaw, Aleligne Yohannes, Balasubramanian Esakki, Tamilarasan Pari, Elangovan Elumalai, Saleh Mobayen, and Andrzej Bartoszewicz. 2021. "Design and Implementation of Morphed Multi-Rotor Vehicles with Real-Time Obstacle Detection and Sensing System" Sensors 21, no. 18: 6192. https://doi.org/10.3390/s21186192