
Distributed Fiber Optic Shape Sensing of Concrete Structures


Abstract
:1. Motivation
2. Distributed Fiber Optic Sensing in Civil Engineering
2.1. Sensing Principles
2.2. DFOS Cables
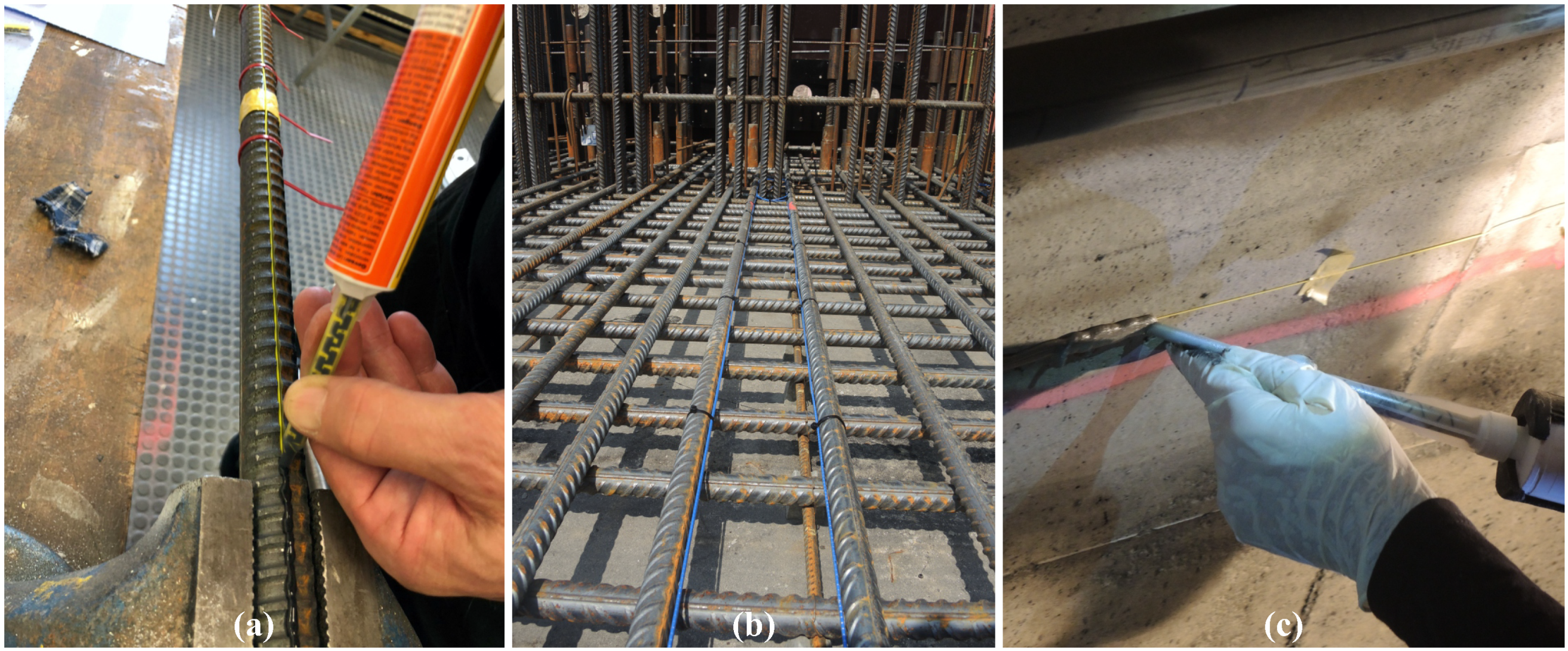
2.3. Sensor Installation Techniques
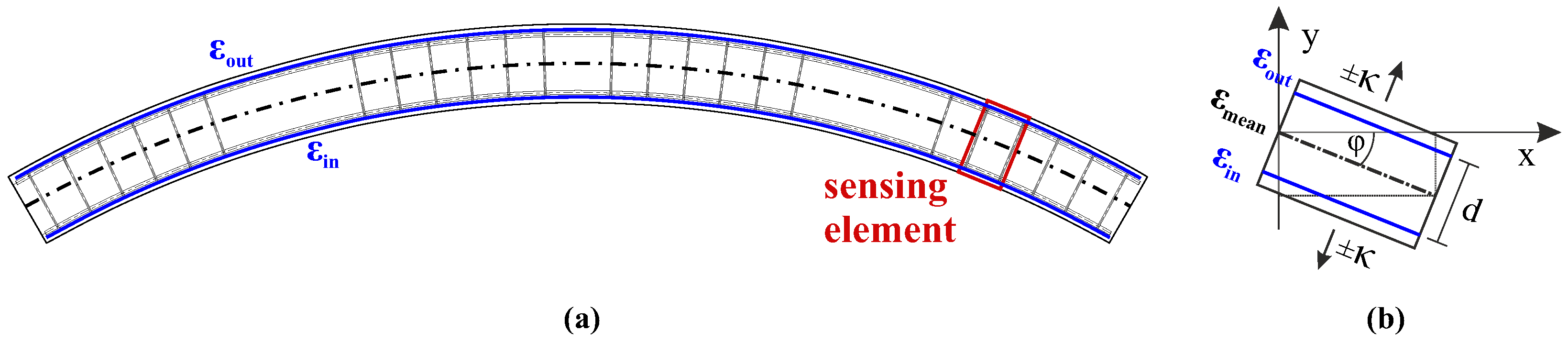
3. Distributed Fiber Optic Shape Sensing Approach
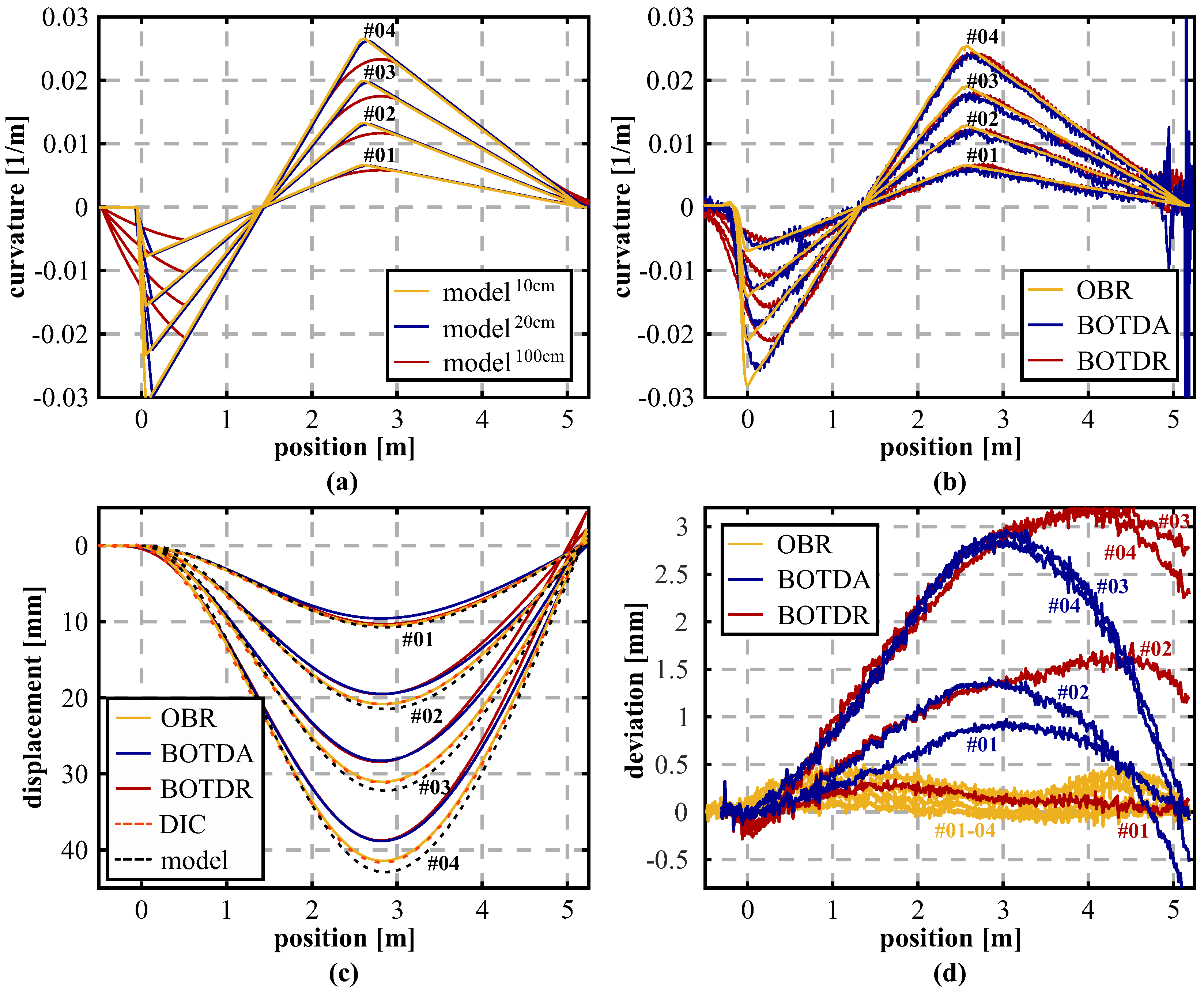
3.1. Impact of Spatial Resolution
3.2. Loading Scenarios
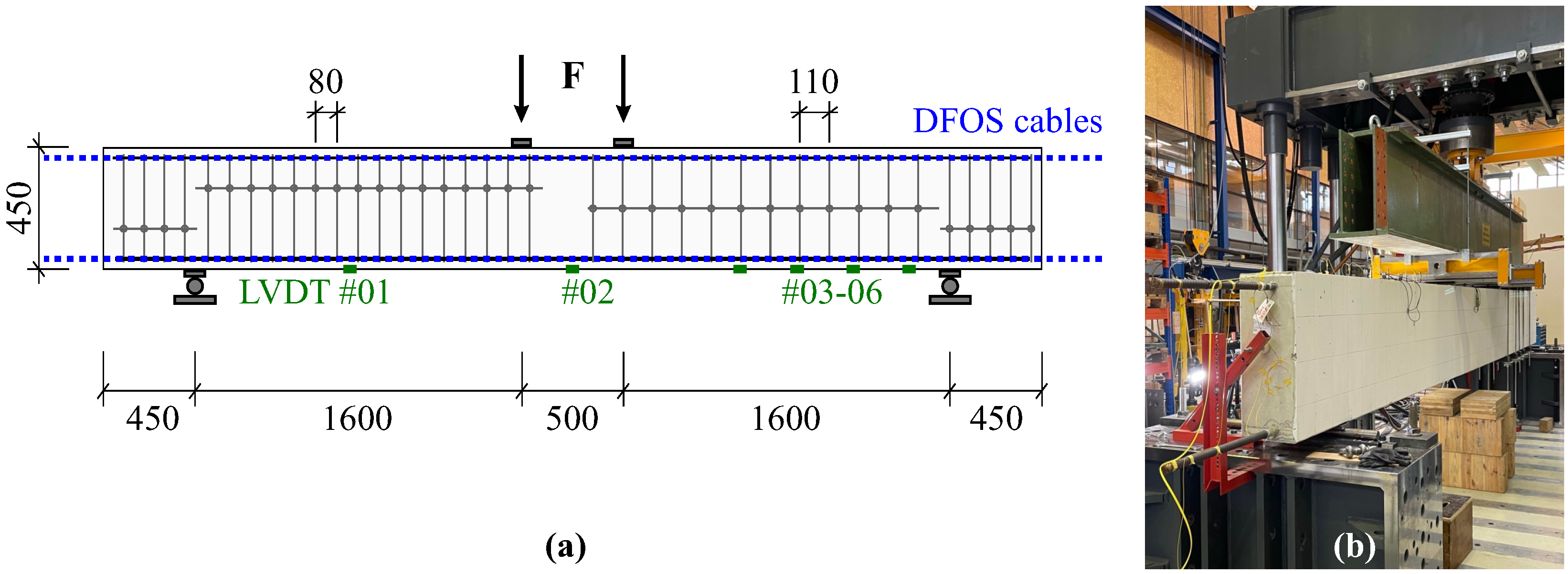
3.3. Laboratory Testing
4. Concrete Beam Loading Tests
4.1. Assessment of Different Sensor Installation Techniques
4.2. Assessment of Different Sensing Principles
5. Case Study: Precast Tunnel Lining Segments
5.1. Shape Sensing Algorithm
5.2. Comparison to Conventional Sensors within Vertical Loading Test
5.3. Assessment of Different Sensing Principles
5.4. Horizontal Loading Test
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karbhari, V.M.; Ansari, F. Structural Health Monitoring of Civil Infrastructure Systems; Woodhead Publishing Ltd.: Cambridge, UK, 2009. [Google Scholar] [CrossRef]
- Matta, F.; Bastianini, F.; Galati, N.; Casadei, P.; Nanni, A. Distributed Strain Measurement in Steel Bridge with Fiber Optic Sensors: Validation through Diagnostic Load Test. J. Perform. Constr. Facil. 2008, 22, 264–273. [Google Scholar] [CrossRef]
- Minardo, A.; Bernini, R.; Amato, L.; Zeni, L. Bridge Monitoring Using Brillouin Fiber-Optic Sensors. IEEE Sens. J. 2012, 12, 145–150. [Google Scholar] [CrossRef]
- Regier, R.; Hoult, N.A. Distributed Strain Behavior of a Reinforced Concrete Bridge: Case Study. J. Bridge Eng. 2014, 19, 05014007. [Google Scholar] [CrossRef]
- Webb, G.T.; Vardanega, P.J.; Hoult, N.A.; Fidler, P.R.A.; Bennett, P.J.; Middleton, C.R. Analysis of Fiber-Optic Strain-Monitoring Data from a Prestressed Concrete Bridge. J. Bridge Eng. 2017, 22, 05017002. [Google Scholar] [CrossRef] [Green Version]
- De Battista, N.; Kechavarzi, C.; Cheal, N.; Harvey, R.; Wong, S. Monitoring the Axial Shortening of Principal Tower Using Embedded Distributed Fibre Optic Sensors. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Cambridge, UK, 8–10 July 2019; pp. 233–240. [Google Scholar] [CrossRef] [Green Version]
- Moser, F.; Lienhart, W.; Woschitz, H.; Schuller, H. Longterm monitoring of reinforced earth structures using distributed fiber optic sensing. J. Civ. Struct. Health Monit. 2016, 6, 321–327. [Google Scholar] [CrossRef] [Green Version]
- Klais, F.; Wolf, P.; Lienhart, W. The Grautschenhof contract—Construction of an intermediate access under complex local conditions. Geomech. Tunn. 2017, 10, 686–693. [Google Scholar] [CrossRef]
- Feng, X.; Han, Y.; Wang, Z.; Liu, H. Structural performance monitoring of buried pipelines using distributed fiber optic sensors. J. Civ. Struct. Health Monit. 2018, 8, 509–516. [Google Scholar] [CrossRef]
- Li, Z. Distributed Fibre Optic Sensing of a Deep Excavation Adjacent to Pre-existing Tunnels. Géotech. Lett. 2018, 8, 171–177. [Google Scholar] [CrossRef]
- Lienhart, W.; Buchmayer, F.; Klug, F.; Monsberger, C.M. Distributed Fiber Optic Sensing on a Large Tunnel Construction Site: Increased Safety, More Efficient Construction and Basis for Condition–Based Maintenance. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Cambridge, UK, 8–10 July 2019; pp. 595–604. [Google Scholar] [CrossRef] [Green Version]
- Wagner, L.; Kluckner, A.; Monsberger, C.M.; Wolf, P.; Prall, K.; Schubert, W.; Lienhart, W. Direct and Distributed Strain Measurements Inside a Shotcrete Lining: Concept and Realisation. Rock Mech. Rock Eng. 2020, 53, 641–652. [Google Scholar] [CrossRef] [Green Version]
- Buchmayer, F.; Monsberger, C.M.; Lienhart, W. Advantages of tunnel monitoring using distributed fibre optic sensing. J. Appl. Geod. 2021, 15, 1–12. [Google Scholar] [CrossRef]
- Billon, A.; Hénault, J.M.; Quiertant, M.; Taillade, F.; Khadour, A.; Martin, R.P.; Benzarti, K. Qualification of a distributed optical fiber sensor bonded to the surface of a concrete structure: A methodology to obtain quantitative strain measurements. Smart Mater. Struct. 2015, 24, 115001. [Google Scholar] [CrossRef]
- Barrias, A.; Casas, J.R.; Villalba, S. Distributed optical fibre sensors in concrete structures: Performance of bonding adhesives and influence of spatial resolution. Struct. Control Health Monit. 2019, 26, e2310. [Google Scholar] [CrossRef]
- Bassil, A.; Wang, X.; Chapeleau, X.; Niederleithinger, E.; Abraham, O.; Leduc, D. Distributed Fiber Optics Sensing and Coda Wave Interferometry Techniques for Damage Monitoring in Concrete Structures. Sensors 2019, 19, 356. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, T.; Huang, H.; Yang, Y. Crack Detection of Reinforced Concrete Member Using Rayleigh-Based Distributed Optic Fiber Strain Sensing System. Adv. Civ. Eng. 2020, 2020, 8312487. [Google Scholar] [CrossRef]
- Henault, J.M.; Quiertant, M.; Delepine-Lesoille, S.; Salin, J.; Moreau, G.; Taillade, F.; Benzarti, K. Quantitative strain measurement and crack detection in RC structures using a truly distributed fiber optic sensing system. Constr. Build. Mater. 2012, 37, 916–923. [Google Scholar] [CrossRef]
- Bassil, A.; Chapeleau, X.; Leduc, D.; Abraham, O. Concrete Crack Monitoring Using a Novel Strain Transfer Model for Distributed Fiber Optics Sensors. Sensors 2020, 20, 2220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fischer, O.; Thoma, S.; Crepaz, S. Distributed fiber optic sensing for crack detection in concrete structures. Civ. Eng. Des. 2019, 1, 97–105. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, H.; Coulibaly, A.A.S.; DeJong, M. Fiber optic sensing of concrete cracking and rebar deformation using several types of cable. Struct. Control Health Monit. 2021, 28, e2664. [Google Scholar] [CrossRef]
- Zhang, W.; Gao, J.; Shi, B.; Cui, H.; Zhu, H. Health Monitoring of Rehabilitated Concrete Bridges Using Distributed Optical Fiber Sensing. Comput.-Aided Civ. Infrastruct. Eng. 2006, 21, 411–424. [Google Scholar] [CrossRef]
- Glišić, B. Influence of the gauge length on the accuracy of long-gauge sensors employed in monitoring of prismatic beams. Meas. Sci. Technol. 2011, 22, 035206. [Google Scholar] [CrossRef]
- Sigurdardottir, D.H.; Stearns, J.; Glišić, B. Error in the determination of the deformed shape of prismatic beams using the double integration of curvature. Smart Mater. Struct. 2017, 26, 075002. [Google Scholar] [CrossRef]
- Palma, P.D.; Iadicicco, A.; Campopiano, S. Curvature Sensor Based on FBGs Embedded in 3D Printed Patches. IEEE Sens. J. 2021, 21, 17868–17874. [Google Scholar] [CrossRef]
- Brault, A.; Hoult, N.A.; Greenough, T.; Trudeau, I. Monitoring of Beams in an RC Building during a Load Test Using Distributed Sensors. J. Perform. Constr. Facil. 2019, 33, 04018096. [Google Scholar] [CrossRef]
- Othonos, A.; Kalli, K. Fiber Bragg Gratings: Fundamentals and Applications in Telecommunications and Sensing; Artech House Publishers: Boston, MA, USA, 1999. [Google Scholar]
- Inaudi, D.; Elamari, A.; Pflug, L.; Gisin, N.; Breguet, J.; Vurpillot, S. Low-coherence deformation sensors for the monitoring of civil-engineering structures. Sens. Actuators A Phys. 1994, 44, 125–130. [Google Scholar] [CrossRef]
- Hartog, A. An Introduction to Distributed Optical Fibre Sensors; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Monsberger, C.; Lienhart, W.; Hayden, M. Distributed fiber optic sensing along driven ductile piles: Design, sensor installation and monitoring benefits. Civ. Struct. Health Monit. 2020, 10, 627–637. [Google Scholar] [CrossRef]
- Luna Technologies Inc. OBR 4600 Optical Backscatter Reflectometer, Datasheet; Luna Technologies Inc.: Roanoke, VA, USA, 2019. [Google Scholar]
- Sensuron LLC. Sensuron Summit Multi-Sensing, Datasheet; Sensuron LLC: Austin, TX, USA, 2021. [Google Scholar]
- Neubrex Co., Ltd. Neural Optical Fiber Scope NEUBRESCOPE NBX-7021; Neubrex Co., Ltd.: Kobe, Japan, 2018. [Google Scholar]
- fibrisTerre Systems GmbH. fTB 5020, Fiber-Optic Sensing System for Distributed Strain and Temperature Monitoring; fibrisTerre Systems GmbH: Berlin, Germany, 2020. [Google Scholar]
- Omnisens SA. DITEST INTERROGATOR, Manual (Version 1–3); Omnisens SA: Morges, Switzerland, 2016. [Google Scholar]
- Febus Optics SAS. Febus Optics—The Manufacturer of All Your Distributed Fiber Sensing Solutions, Brochure; Febus Optics SAS: Pau, France, 2021. [Google Scholar]
- OZ Optics Ltd. Fiber Optic Distributed Strain and Temperature Sensors (DSTS) BOTDA Module; OZ Optics Ltd.: Ottawa, ON, Canada, 2018. [Google Scholar]
- HBM FiberSensing S.A. FS22SI Industrial BraggMETER SI, Datasheet; HBM FiberSensing S.A.: Maia, Portugal, 2021. [Google Scholar]
- Luna Technologies Inc. si255 HYPERION Optical Sensing Instrument, Datasheet; Luna Technologies Inc.: Roanoke, VA, USA, 2021. [Google Scholar]
- Solifos AG. BRUsens DSS 7.2 mm V3 Grip 3_50_2_002; Solifos AG: Windisch, Switzerland, 31 October 2019. [Google Scholar]
- Solifos AG. BRUsens DSS 3.2 mm V9 Grip 3_50_2_005; Solifos AG: Windisch, Switzerland, 31 October 2019. [Google Scholar]
- The Light Connection Inc. Data Sheet: Tight Buffer; Rev. 3.0 11/12/2020; The Light Connection Inc.: Oriskany, NY, USA, 2020. [Google Scholar]
- SMARTEC SA. SMARTprofile II Strain Sensing Cable; SMA 11.1030; SMARTEC SA: Manno, Switzerland, 2021. [Google Scholar]
- Solifos AG. BRUsens DTS STL PA 3_50_1_001; Solifos AG: Windisch, Switzerland, 31 October 2019. [Google Scholar]
- Moritz, B.; Heissenberger, R.; Schachinger, T.; Lienhart, W. Long-term monitoring of railway tunnels. Geomech. Tunn. 2021, 14, 35–46. [Google Scholar] [CrossRef]
- Corning Inc. White Paper WP 8002: Optical Fiber Mechanical Reliability; Corning Inc.: New York, NY, USA, 2017. [Google Scholar]
- Corning Inc. White Paper WP 5082: Frequently Asked Questions on Fiber Reliability; Corning Inc.: New York, NY, USA, 2016. [Google Scholar]
- Delepine-Lesoille, S.; Girard, S.; Landolt, M.; Bertrand, J.; Planes, I.; Boukenter, A.; Marin, E.; Humbert, G.; Leparmentier, S.; Auguste, J.L.; et al. France’s State of the Art Distributed Optical Fibre Sensors Qualified for the Monitoring of the French Underground Repository for High Level and Intermediate Level Long Lived Radioactive Wastes. Sensors 2017, 17, 1377. [Google Scholar] [CrossRef] [Green Version]
- Mang, H.; Hofstetter, G. Festigkeitslehre; Springer: Berlin/Heidelberg, Germany, 2018; Volume 5. [Google Scholar] [CrossRef]
- Pei, H.F.; Yin, J.H.; Jin, W. Development of novel optical fiber sensors for measuring tilts and displacements of geotechnical structures. Meas. Sci. Technol. 2013, 24, 095202. [Google Scholar] [CrossRef]
- Sigurdardottir, D.H. Strain-Based Monitoring Methods for Beam-Like Structures. Ph.D. Thesis, Princeton University, Department of Civil and Environmental Engineering, Princeton, NJ, USA, 2015. [Google Scholar]
- Monsberger, C.; Lienhart, W. Distributed fiber optic shape sensing along shotcrete tunnel linings: Methodology, field applications, and monitoring results. J. Civ. Struct. Health Monit. 2021, 11, 337–350. [Google Scholar] [CrossRef]
- Presl, R. Entwicklung Eines Automatisierten Messsystems zur Charakterisierung Faseroptischer Dehnungssensoren. Master’s Thesis, FH Upper Austria, Wels, Austria, 2009. [Google Scholar]
- Innotec GmbH. Technische Info Metal Weld 50 mL Weiß; Innotec GmbH: Moers, Germany, 1 May 2017. [Google Scholar]
- Monsberger, C.M.; Lienhart, W. Design, Testing, and Realization of a Distributed Fiber Optic Monitoring System to Assess Bending Characteristics Along Grouted Anchors. J. Light. Technol. 2019, 37, 4603–4609. [Google Scholar] [CrossRef]
- Poldon, J.J.; Hoult, N.A.; Bentz, E.C. Distributed Sensing in Large Reinforced Concrete Shear Test. ACI Struct. J. 2019, 116, 235–245. [Google Scholar] [CrossRef]
- Lienhart, W.; Galler, R. Tubbing Element with Strain Measurement. Austria AT516158 (B1), 15 March 2016. [Google Scholar]
- Soga, K.; Kwan, V.; Pelecanos, L.; Rui, Y.; Schwamb, T.; Seo, H.; Wilcock, M. The Role of Distributed Sensing in Understanding the Engineering Performance of Geotechnical Structures. In Geotechnical Engineering for Infrastructure and Development; ICE Virtual Library: London, UK, 2015; pp. 13–48. [Google Scholar] [CrossRef]
- Monsberger, C.M.; Lienhart, W.; Moritz, B. In-Situ assessment of strain behaviour inside tunnel linings using distributed fibre optic sensors. Geomech. Tunn. 2018, 11, 701–709. [Google Scholar] [CrossRef]
- Gehwolf, P.; Monsberger, C.; Barwart, S.; Wenighofer, R.; Galler, R.; Lienhart, W.; Haberler-Weber, M.; Moritz, B.; Barwart, C.; Lange, A. Deformation measurements of tunnel segments at a newly developed test rig. Geomech. Tunn. 2016, 9, 180–187. [Google Scholar] [CrossRef]
- Monsberger, C.; Lienhart, W. In-Situ Deformation Monitoring of Tunnel Segments using High-resolution Distributed Fibre Optic Sensing. In Proceedings of the 8th International Conference on Structural Health Monitoring of Intelligent Infrastructure (SHMII-8). International Society for Structural Health Monitoring of Intelligent Infrastructure, Brisbane, Australia, 5–8 December 2017. [Google Scholar]
- Monsberger, C.M.; Lienhart, W.; Kluckner, A.; Schubert, W. In-Situ assessment of distributed strain and curvature characteristics in shotcrete tunnel linings based on fiber optic strain sensing. In Proceedings of the ISRM 14th International Congress on Rock Mechanics. International Society for Rock Mechanics and Rock Engineering, Foz do Iguassu, Brazil, 13–18 September 2019. [Google Scholar]
- Radončić, N.; Kern, M.; Weissnar, M.; Moritz, B. Strain gauges in pre-cast concrete segments: Working principle, evaluation and interpretation. Geomech. Tunn. 2015, 8, 265–272. [Google Scholar] [CrossRef]
- Berrocal, C.G.; Fernandez, I.; Bado, M.F.; Casas, J.R.; Rempling, R. Assessment and visualization of performance indicators of reinforced concrete beams by distributed optical fibre sensing. Struct. Health Monit. 2021, 1475921720984431. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scattering | Rayleigh | Brillouin | ||
|---|---|---|---|---|
| Sensing technique | OFDR | TW-COTDR | BOTDA/ BOFDA | BOTDR/ BOFDR |
| Configuration | Single ended | Loop | Single Ended | |
| Commercial manufacturers | Luna, Sensuron | Neubrex | fibrisTerre, Omnisens, Febus, OZ Optics, Neubrex | |
| Sensing range | 70 m (2 km) | 20 km | up to 80 km | up to 100 km |
| Spatial resolution | ≤10 mm | 2–20 cm | ≥20 cm | ≥100 cm |
| Typ. strain repeatability | ≤1 μm/m | ≤0.5 μm/m | ≥2 μm/m | ≥20 μm/m |
| Typ. measurement duration | <10 s | ≤10 min | 3–60 min | |
| Sensor Type | 95% Strain Gradient Peak Width [cm] | ||
|---|---|---|---|
| at ∼500 | at ∼1000 | at ∼1500 | |
| SMF (Ormocer) | — | 2.0 | — |
| SMF 28e (Acrylat, clamped) | — | 2.6 | — |
| SMF 28e (Acrylat, glued) | 11.2 | 11.3 | 12.0 |
| Tight-buffered | 8.5 | 8.1 | 8.3 |
| BRUsens FiMT | 1.8 | 1.9 | 1.9 |
| BRUsens V9 | 10.2 | 10.0 | 10.3 |
| BRUsens V3 | 15.4 | 15.5 | 15.6 |
| LVDT | Rel. Error [%] | ||||||
|---|---|---|---|---|---|---|---|
| No. | Pos. | Rebar | Concrete | Surface | Rebar | Rebar Tension | Compr. |
| #01 | −1.05 m | 5.0 | 3.9 | 3.8 | 10.4 | 9.7 | |
| #02 | 0.00 m | 13.8 | 12.7 | 12.9 | 2.6 | 2.2 | |
| #03 | +0.75 m | 16.1 | 13.2 | 15.7 | 0.0 | 4.3 | |
| #04 | +1.05 m | 14.5 | 10.5 | 14.2 | 1.5 | 5.8 | |
| #05 | +1.35 m | 5.5 | 0.1 | 5.3 | 9.6 | 0.2 | |
| #06 | +1.65 m | 3.9 | 2.7 | 3.8 | 8.3 | 1.8 | |
| LVDT | Rel. Error [%] | |||
|---|---|---|---|---|
| No. | Pos. | OBR | BOFDA | FBG |
| #01 | −2.40 m | 9.4 | 9.3 | 15.2 |
| #02 | −1.50 m | 1.0 | 1.1 | 4.9 |
| #03 | 0.00 m | 0.5 | 3.1 | 5.4 |
| #04 | +1.50 m | 1.3 | 3.2 | 6.1 |
| #05 | +2.40 m | 3.9 | 3.2 | 8.6 |
| Load | Rel. Error [%] | |||||
|---|---|---|---|---|---|---|
| #01 | #02 | #03 | #04 | #05 | DIC | |
| −1.65 m | −0.85 m | 0.00 m | +0.85 m | +1.65 m | — | |
| 50 kN | 12.0 | 9.1 | 2.1 | 23.2 | 11.4 | 39.3 |
| 100 kN | 9.2 | 3.0 | 7.5 | 47.6 | 9.4 | 26.4 |
| 150 kN | 5.9 | 0.2 | 5.5 | 12.6 | 9.3 | 14.7 |
| 200 kN | 3.1 | 0.1 | 2.5 | 3.0 | 5.3 | 5.7 |
| 250 kN | 2.4 | 3.4 | 0.3 | 0.2 | 4.1 | 6.5 |
| 300 kN | 2.1 | 3.2 | 0.8 | 1.5 | 3.9 | 4.8 |
| 350 kN | 1.3 | 2.4 | 0.7 | 0.2 | 3.0 | 1.7 |
| 400 kN | 0.8 | 2.2 | 0.6 | 0.6 | 2.5 | 1.4 |
| 450 kN | 0.3 | 2.4 | 0.8 | 0.0 | 2.1 | 1.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monsberger, C.M.; Lienhart, W. Distributed Fiber Optic Shape Sensing of Concrete Structures. Sensors 2021, 21, 6098. https://doi.org/10.3390/s21186098
Monsberger CM, Lienhart W. Distributed Fiber Optic Shape Sensing of Concrete Structures. Sensors. 2021; 21(18):6098. https://doi.org/10.3390/s21186098
Chicago/Turabian StyleMonsberger, Christoph M., and Werner Lienhart. 2021. "Distributed Fiber Optic Shape Sensing of Concrete Structures" Sensors 21, no. 18: 6098. https://doi.org/10.3390/s21186098