2.1. Fiber Bragg Grating as a Temperature Sensor
Firstly, it is important to describe briefly all the components involved in the tests. One of them is the Fiber Bragg Grating Sensors (FBGSs) from the company FBGS INTERNATIONAL, manufactured in the so-called draw tower process coated with ORMOCER [
14] and with a typical fiber diameter of 125 microns. These so-called Draw Tower Gratings (DTGs) are high resistant sensors that present almost the same breaking strength values as the optical fiber without any grating. The FBGS optic fiber sensors use the principle of Bragg reflection in a specific broadband.The reflected wavelength is a function of variables such as temperature or stress [
15]. Reference [
16] shows an equation that relates temperatures and wavelength (
). Equation (
1) shows a relationship between wavelength, temperature, strain (
) and refractive index (
n) [
17]:
In order to isolate the FBGS from strains (
), the optic fiber was introduced in a capillary, so Equation (
1) can be simplified as a third degree polynomial function
[
17,
18] (Reference [
17] Section 8.2 provides a table with different thermal expansion and thermo-optic coefficients depending on the temperature; it can be seen that the thermal expansion coefficient is almost constant at temperatures higher than 250 K and the thermo-optic can be expressed as a polynomial). The curve is obtained by a calibration process using a SIKA TP3M165E2 highly precise temperature calibrator with an accuracy of 0.3
C and stability of 0.01
C. For this calibration, the instrumented airfoil was introduced in the temperature calibrator and three cycles with five temperature steps were applied between 20
C and −30
C. In order to determine the accuracy of the calibration, the average value of the standard deviation of the grating values is obtained (Equation (
3). The accuracy of the sensors at the temperature
T is
. The number of gratings is
and the standard deviation of the wavelength values in the three cycles at temperature
T is
. The accuracy results are represented in
Table 1:
As previously mentioned, for isolation reasons and to avoid any parasitic strain, the optic fiber is located in a freely movable manner inside a polyimide capillary with an external diameter of 0.55 mm. The capillary is filled with silicone oil to enhance the thermal heat transfer from the sensor surface to the sensor and, this way, its response time is improved. The sensor zones were chemically stripped in a sulfuric acid bath to remove the coating and guarantee a high precision of the sensors’ temperature measurements by avoiding any influence of a coating material. The distance between gratings was one centimeter and the width of the grating was 8 mm. A commercial optical interrogator was used, the Luna Hyperion si155, with a wavelength range of 1500 to 1600 nm and an accuracy of 1 pm. The si155 features a high power, wide swept wavelength laser with guaranteed absolute accuracy on every scan, which is realized with Micron Optics patented Fiber Fabry-Perot filter and wavelength reference technology. The interrogator counts on rapid, full-spectrum data acquisition and flexible peak detection algorithms of FBGSs.
The spectral response of the fiber can be seen in
Figure 1. The spectral response of the lower surface is weaker than the spectral response of the upper surface, but all peaks can be detected without problems. Both responses were represented for different temperatures, 22
C and −15
C, before and during icing, respectively.
2.2. Model Resolution
In order to predict the ice conditions, it is important to define a model. For modelling the temperature in the surface of the airfoil, the heat (
5) and mass balance (
4) equations of reference [
8] are used. The control volume used is represented in
Figure 2. It represents the initial control volume previous to the ice accretion. The airfoil surface is divided into nodes, and each one represents a control volume
, as can be seen in
Figure 3. Normally, the modelled temperature in the ice accretion codes is the ice surface temperature, but in this document it is considered that initially the ice surface temperature is similar to the airfoil surface temperature. The airfoil has been made in Polylactic Acid (PLA) using additive manufacturing. The PLA thermal conductivity is less than ice, so the conduction heat flux is negligible (normally in the icing accretion codes [
8], conduction is considered negligible when an ice layer is formed; PLA has lower thermal conductivity than ice so this hypothesis could be applied in the present case).
In Equation (
4),
is the mass flux of ice formed in the surface,
is the mass flux of water that impinges the surface,
is the mass flux that enters in the control volume represented in
Figure 2,
is the mass flux that leaves that control volume and
is the mass flux of water that is evaporated.
The first term in the energy balance equation represents the fusion of impinging water which is the product between the impinging water mass flux (
) and the water latent energy of fusion (
). The impinging water mass flux is proportional to the collection efficiency value
, the Liquid Water Content (LWC) and the airspeed (
):
The second term represents the evaporation of a small liquid mass in the air. It is produced due to the water vapour concentration difference between the surface and the air. The evaporative flux heat is proportional to the evaporative mass flux and to the latent heat of vaporization (
). The mass flow rate between the surface and the air (
) could be expressed as [
13]:
The evaporative term is only taken into account in case of glaze ice, because in rime ice there is not a water film that flows on the airfoil surface. The water vapour densities at the surface
and in the air
are expressed as functions of the saturated vapour pressure
at the surface and in the airflow and the relative humidity
(G. Fortin 2006 [
13]).
The convective mass transfer coefficient
[
8] is expressed as a function of the Lewis number (
) and the convective transfer coefficient (
). The Lewis number is the ratio between the thermal and mass diffusivity
:
The third term represents the sensible heat of water and ice. In this term, the sensible heat of water and of ice on the surface of the impinging (
) and the incoming water (
) mass flow are included:
The sensible heat of impinging water depends on the impinging water mass flow and of the specific heat of water in the airfoil surface (
) and of ice (
):
Additionally, the sensible heat of incoming water depends on the specific heat of water in the previous control volume
and of the specific heat of ice.
The fourth term represents the heat flow gained by the surface due to the kinematic energy of the incoming droplets:
The last term represents the convective heat transfer. Normally, it is defined as the net convective loss from the body (Equation (
19)) which is the difference between the convective heat lost and the frictional heat gained [
9]. The convective heat flux transfer is proportional to the difference between the airfoil surface temperature
in the control volume and the static temperature
. It is highly dependant on the convective heat transfer coefficient.
The frictional gained heat flux is proportional to the difference between the recovery temperature
and the static air temperature
For solving the energy balance equation, the collection efficiency and convective heat transfer coefficient must be calculated. Both parameters depend on the fluid field which is calculated with a CFD model (
Section 2.2.1). Once the fluid field has been solved, the laminar convective heat transfer coefficient (
Section 2.2.2) and the collection efficiency (
Section 2.2.3) are calculated as well. Finally, an energy balance resolution algorithm is used for obtaining the temperature profile in the airfoil (
Section 2.2.4).
2.2.1. CFD Model
The air stream around the airfoil was modelled using OpenFoam. Normally, in ice accretion codes, a potential flow model is used for solving the airflow. Due to the anomalous airfoil used for the tests (
Figure 4) a turbulent Spalart–Allmaras model [
19] was considered. The selected kinematic viscosity is 12.43 × 10
m
/s. The rest of the constant values are similar to reference [
20]. All the conditions of the model are exposed in
Table 2.
2.2.2. Convective Heat Transfer Coefficient
One of the most important parameters in predicting ice accretion behaviour is the convection. Many efforts have been made to determine the values of the convective heat transfer coefficient Samad, A [
21]. For calculating the heat transfer coefficient, a laminar integral boundary layer method has been used [
22], with
being the thickness of the thermal boundary layer and
the thermal conductivity of air (Equation (
20)). The result can be expressed as a function of the external flow temperature
[
9]:
The thermal boundary layer thickness can be expressed as a function of the surface distance from the stagnation point (
s):
The integral will be solved using the trapezoidal rule. The external airspeed was selected taking a vector with a direction that is normal concerning the airfoil surface and its modulus is a distance that satisfies the condition that the exterior airspeed is constant in the surface normal direction.
Another way to calculate the convective heat transfer coefficient in the stagnation point is by using Equation (
22). According to the reference [
23], the heat transfer along a cylinder in the stagnation line is a function of the air density
, air viscosity
, airspeed
, Prandtl number
, leading edge equivalent diameter
D and thermal conductivity of air:
For an airfoil an equivalent diameter of the leading edge is calculated. The NACA 0012 leading edge equivalent diameter
D is a 3.16% of the chord [
24] of the original airfoil.
2.2.3. Collection Efficiency Calculation
The value of the impinging water mass depends on the local collection efficiency
. Using a Lagrangian perspective, the local collection efficiency is calculated integrating trajectories of a droplet population distribution (Chang et al. [
25]). The local collection efficiency was calculated with Equation (
23) and the droplets’ trajectories were integrated according to the equations of reference Zarling [
26] and using a Euler method. In Equation (
23), the term
represents the variation between the droplet initial and final heights and
represents the airfoil distance between the airfoil point where the
y component is equal to the initial point of the droplet trajectory and the last point of the integrated trajectory [
8].
Once the collection efficiency of each droplet size has been calculated, their weighted average with the volume percentage is made. In this paper it has been considered that all the droplet population collection efficiencies can be approximated as a unique droplet trajectory where the diameter value is equal to the MVD of the droplet population (without this simplification the problem would be different for each droplet distribution).
2.2.4. Model Resolution
The model algorithm resolution begins in the stagnation point node (node 1 in
Figure 5). In the stagnation node, the mass flow of incoming water does not exist. The resolution is made in two steps [
8]. Firstly, glaze ice conditions are assumed. In glaze ice, the freezing fraction is less than one and the surface temperature is the same as the melting point temperature [
6]. If the mathematical solution of the freezing fraction with a glaze hypothesis is higher than the unity, the previous assumption is wrong, so the model would be resolved with a rime supposition. In the case of being less than one, the hypothesis was right, so the water flow mass that is going out of the control volume is calculated using the mass balance equation. In glaze ice, the equation is non-linear, so the Newton–Raphson method is used in order to calculate the freezing fraction of each node.
In the case of rime ice, the surface temperature is less than the melting temperature and the freezing fraction is one. In rime ice, the evaporative term is null ( Messinger [
6]), so the energy balance equation is linear. Once a feasible result has been obtained, the same process is done with the following node (see
Figure 5).
2.3. Tests Description
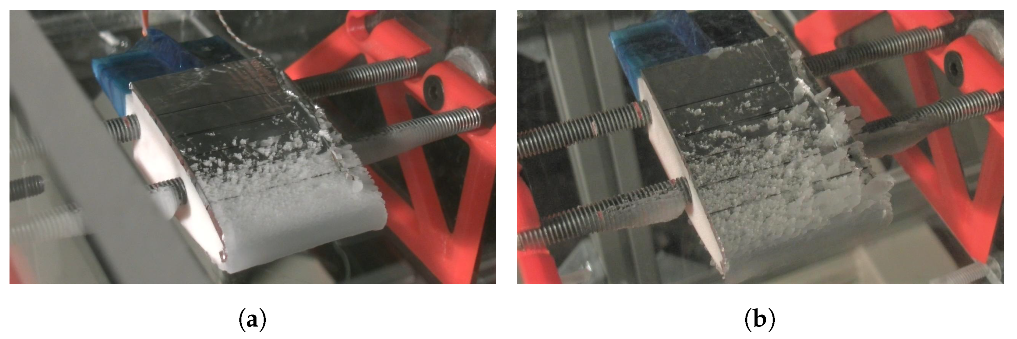
Several tests at different temperatures and ordered in a test matrix were carried out in order to obtain repetitive results. The tests were planned to have outcomes in two types of ice—glaze and rime. All tests were recorded with the same time sequence for having a visual explanation of the sensor signals and for giving sense to the signal events recorded.
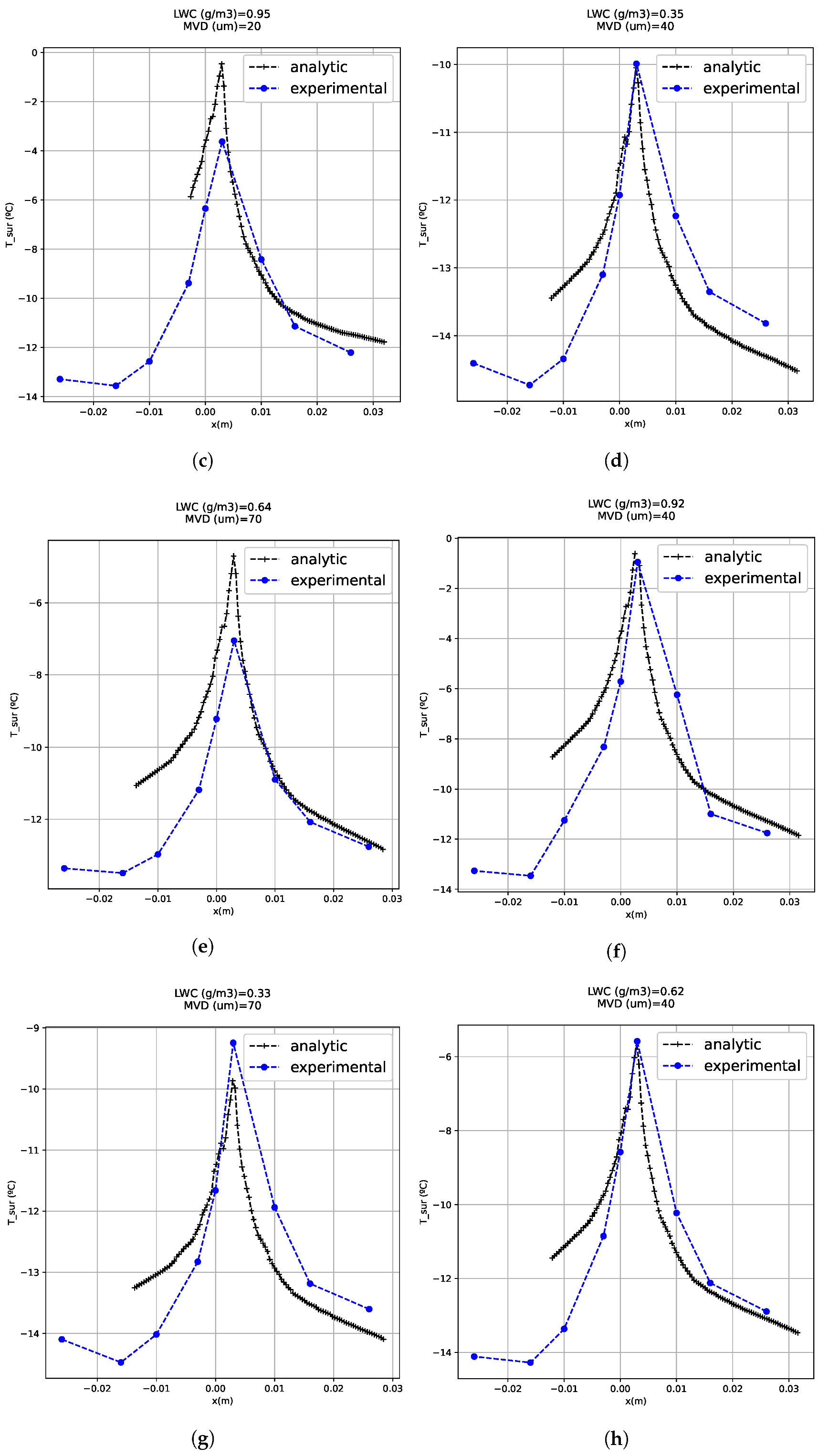
The test matrix was designed with the goal of comparing the results with a constant parameter in different conditions of LWC and MVD. Each test matrix has constant ambient temperature and a fixed air speed of 70 m/s. Two matrices were tested, one at −5
C and the other at −13.5
C. Conditions are described in
Table 3. There is one Appendix O [
3], freezing drizzle conditions, with LWC ≈ 0.3 g/m
and with MVD of 40
m.
The airfoil used in the tests is a NACA 0012, cut for not having a too large chord for testing in the icing tunnel. The dimensions of the airfoil are shown in
Figure 4, with sensors uniformly separated all over the chord of the airfoil. This airfoil was chosen due to its thickness and because of its symmetry. Several tests with different airfoils were done previously in order to find out the effect of the airfoil thickness in ice formation with SLD conditions. A NACA 0012 was selected for these tests because it was observed that in airfoils with less thickness the large droplets impinge farther from the leading edge.
In order to detect ice formation and to obtain information about the temperatures in different locations all over the chord, eight sensors were placed in the upper surface and another eight in the lower surface. Of those, four were placed in the leading edge, two in the upper and another two in the lower surface. Leading edge sensors have a big temperature step in the conditions of
Table 3 so they are very useful for ice detection. The other sensors can be useful in order to know the environmental icing conditions. Positions and names of each sensor are in
Table 4.
Every test consists of one icing cycle of approximately 90 s. An example of the signals of the tests can be seen in
Figure 6. The tests have three stages:
The temperature is stabilised in an equilibrium temperature before the fogging.
In the 40th second the temperature rises abruptly due to the beginning of the icing cycle. It stabilizes in a new equilibrium temperature.
In the 130th second the fogging stops and the temperatures drop abruptly.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}