
A New Photographic Reproduction Method Based on Feature Fusion and Virtual Combined Histogram Equalization


Abstract
:1. Introduction
2. Related Work
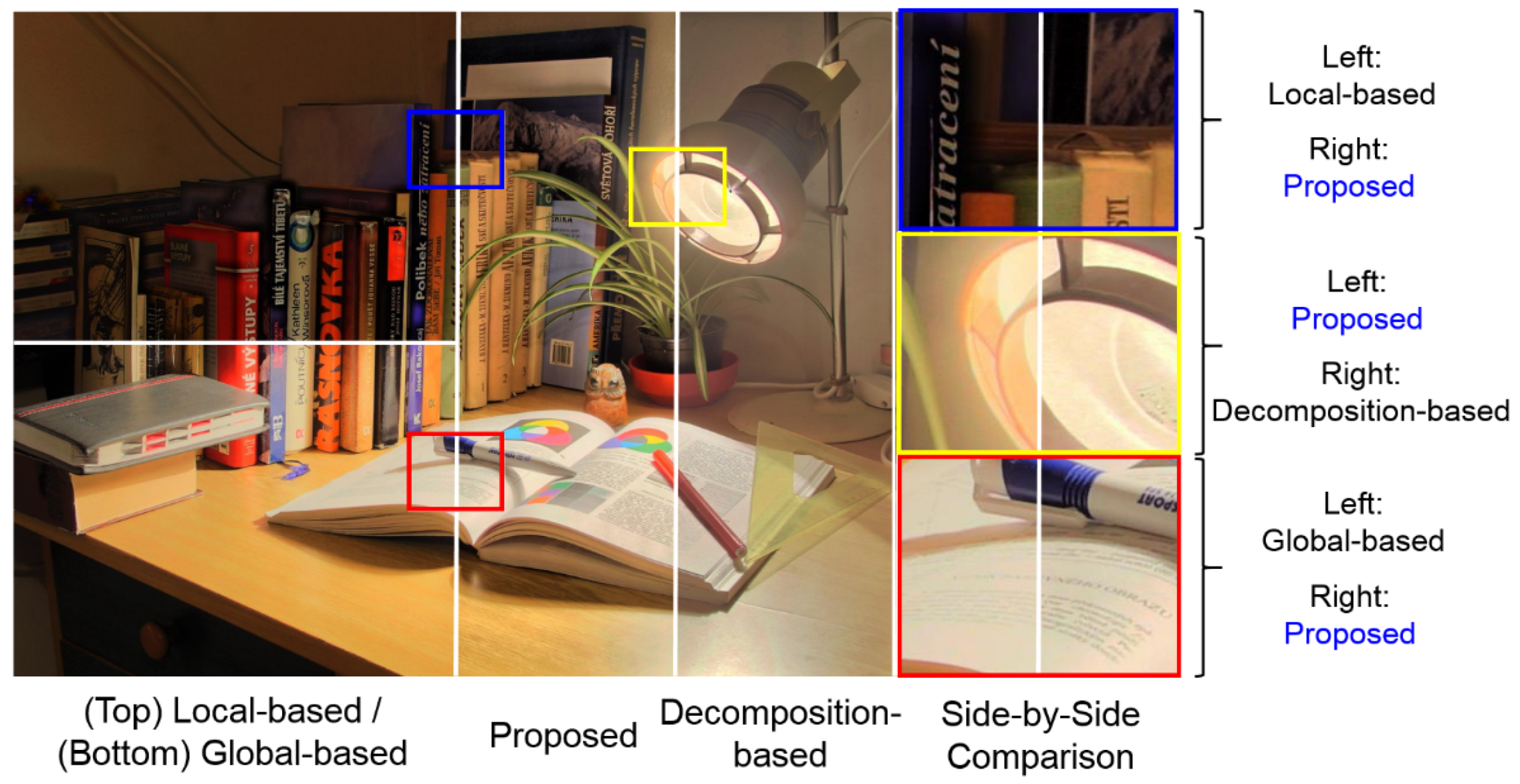
- We propose using a hybrid histogram analysis scheme to extract mutually compatible global/local features in parallel, and a feature fusion scheme to construct the virtual combined histogram, which allows us to inherit the superiority of the global-based (and the local-based) methods smoothly.
- Instead of performing late fusion (i.e., finally fusing all the processed layers as the decomposition-based methods do), the proposed virtual combined histogram equalization scheme can fuse global/local features in an earlier stage, which increases the naturalness of the output image.
- Owning to the difference between the dark/bright regions and normal-luminance regions, we propose using the weight map to adaptively modify the weights locally in the feature fusion.
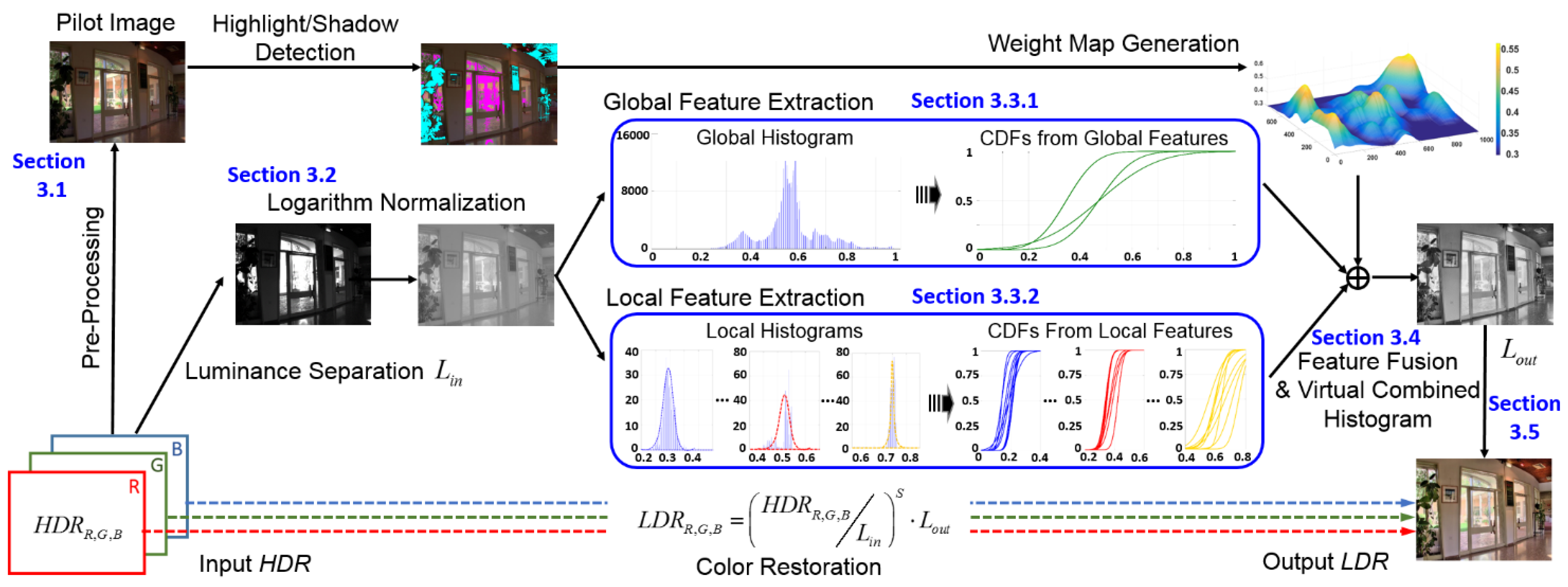
3. Proposed Approach
3.1. Pre-Processing for the Highlight/Shadow Detection
3.2. Luminance Separation and Initial Logarithmically Normalization
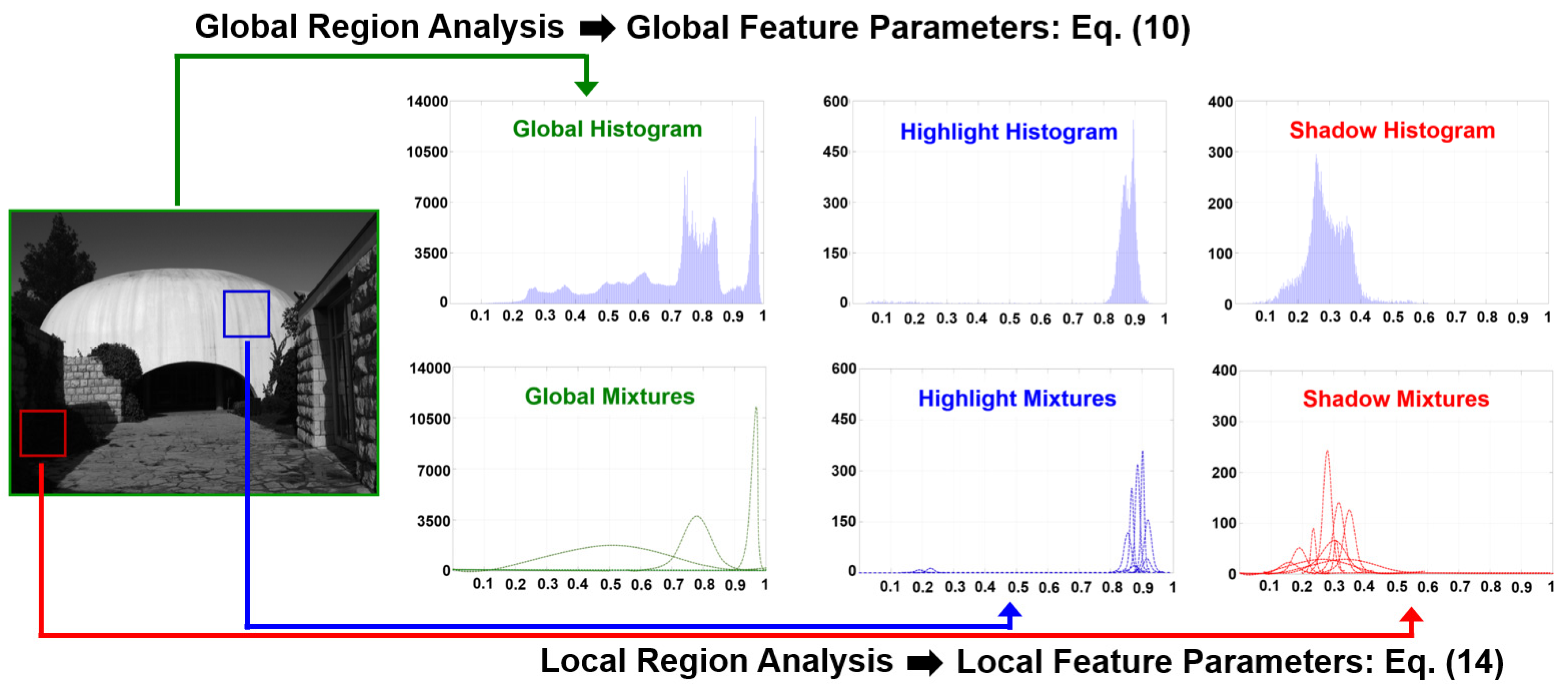
3.3. Feature Extraction through Mutually Hybrid Histogram Analysis
3.3.1. Global Region Analysis and Global Feature Extraction
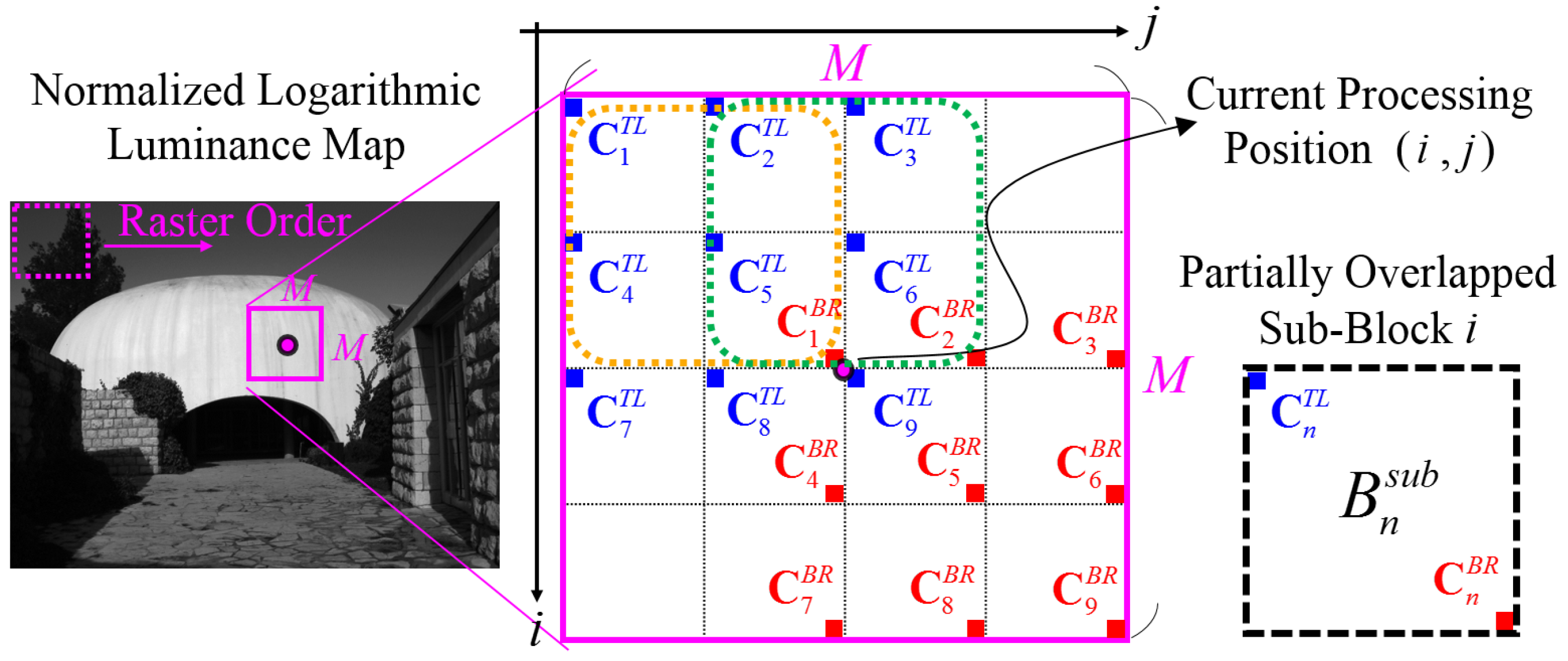
3.3.2. Local Region Analysis and Local Feature Extraction
3.4. Virtual Combined Histogram Construction Based on Feature Fusion
3.5. Luminance Modification and Color Recovery
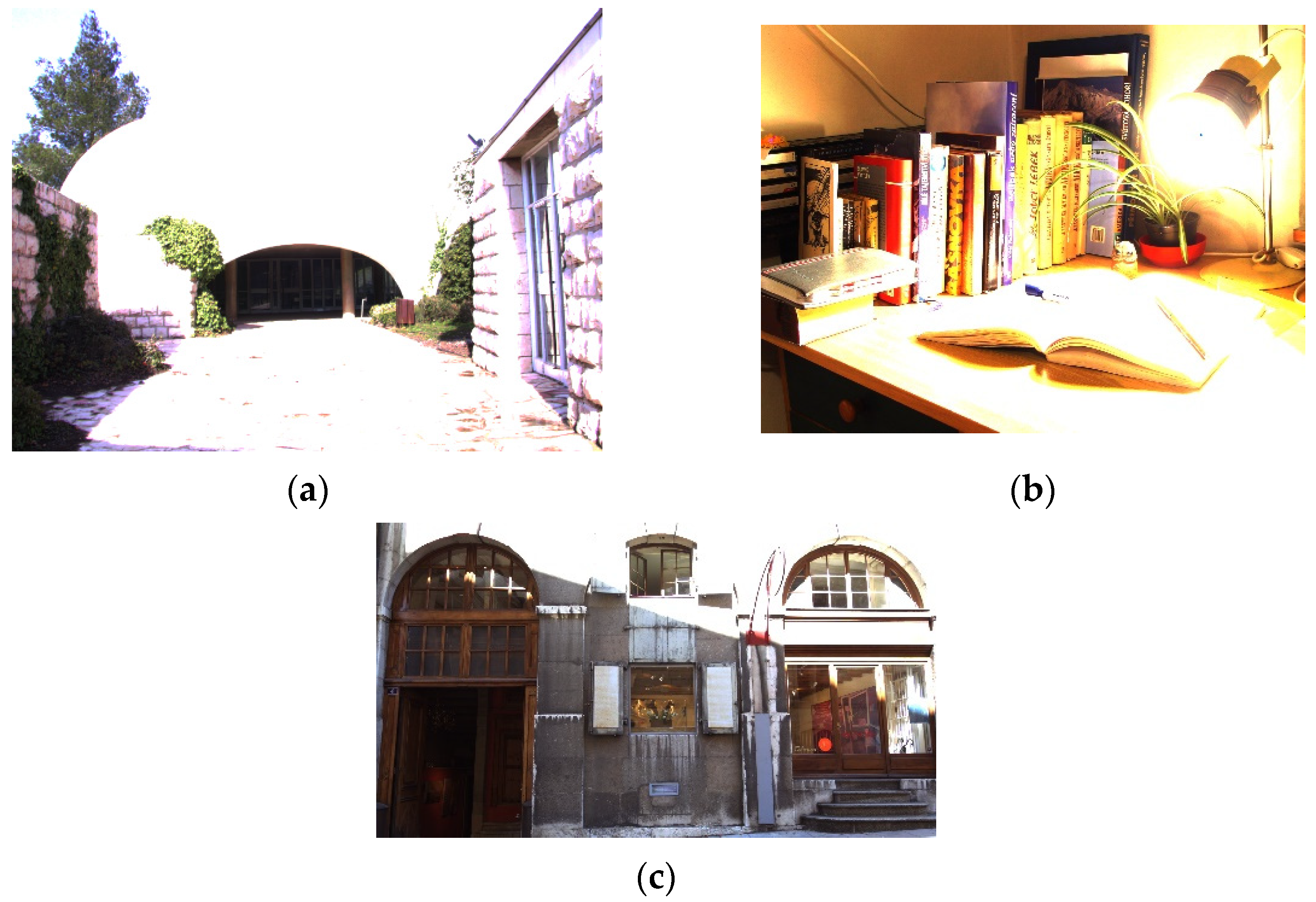
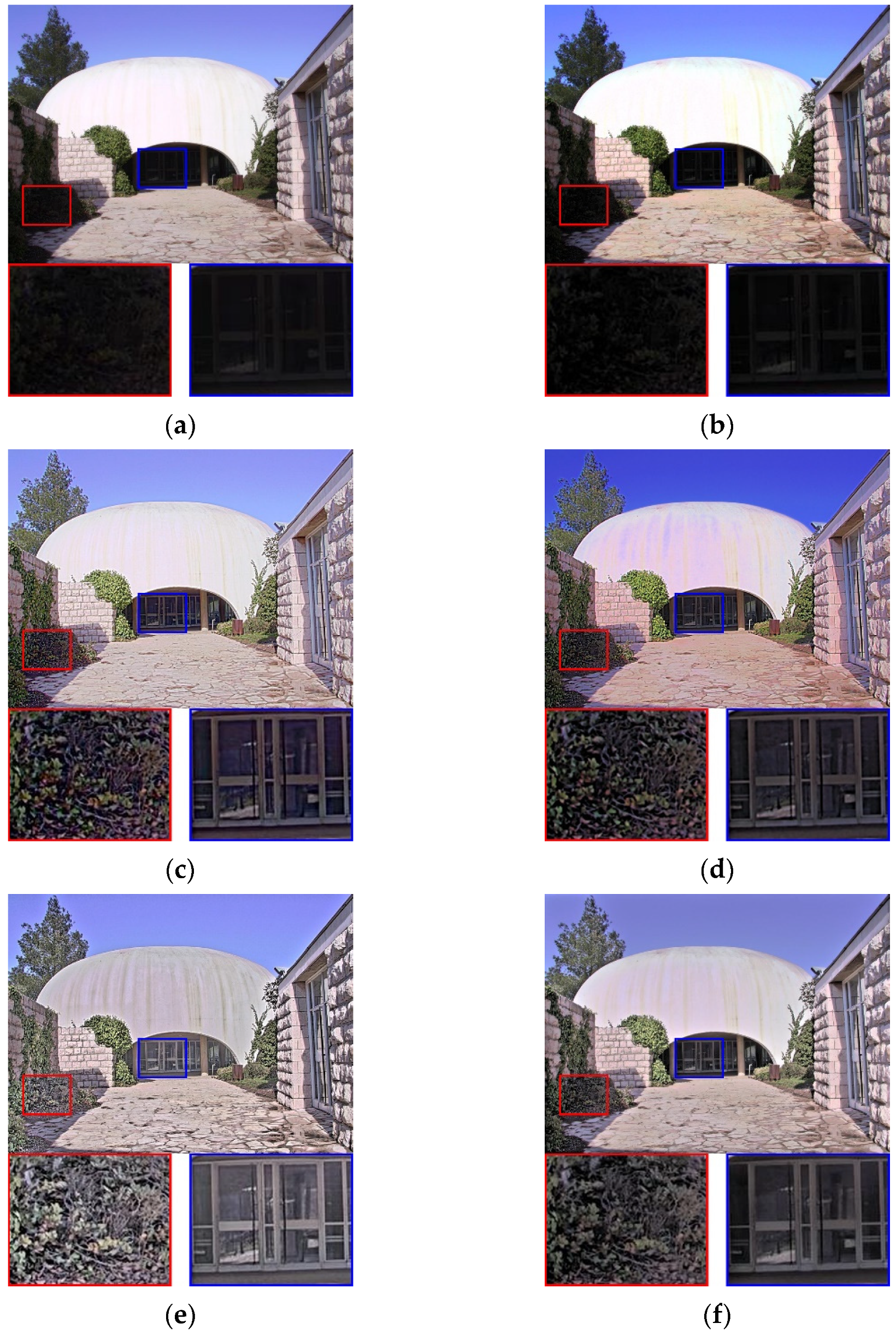
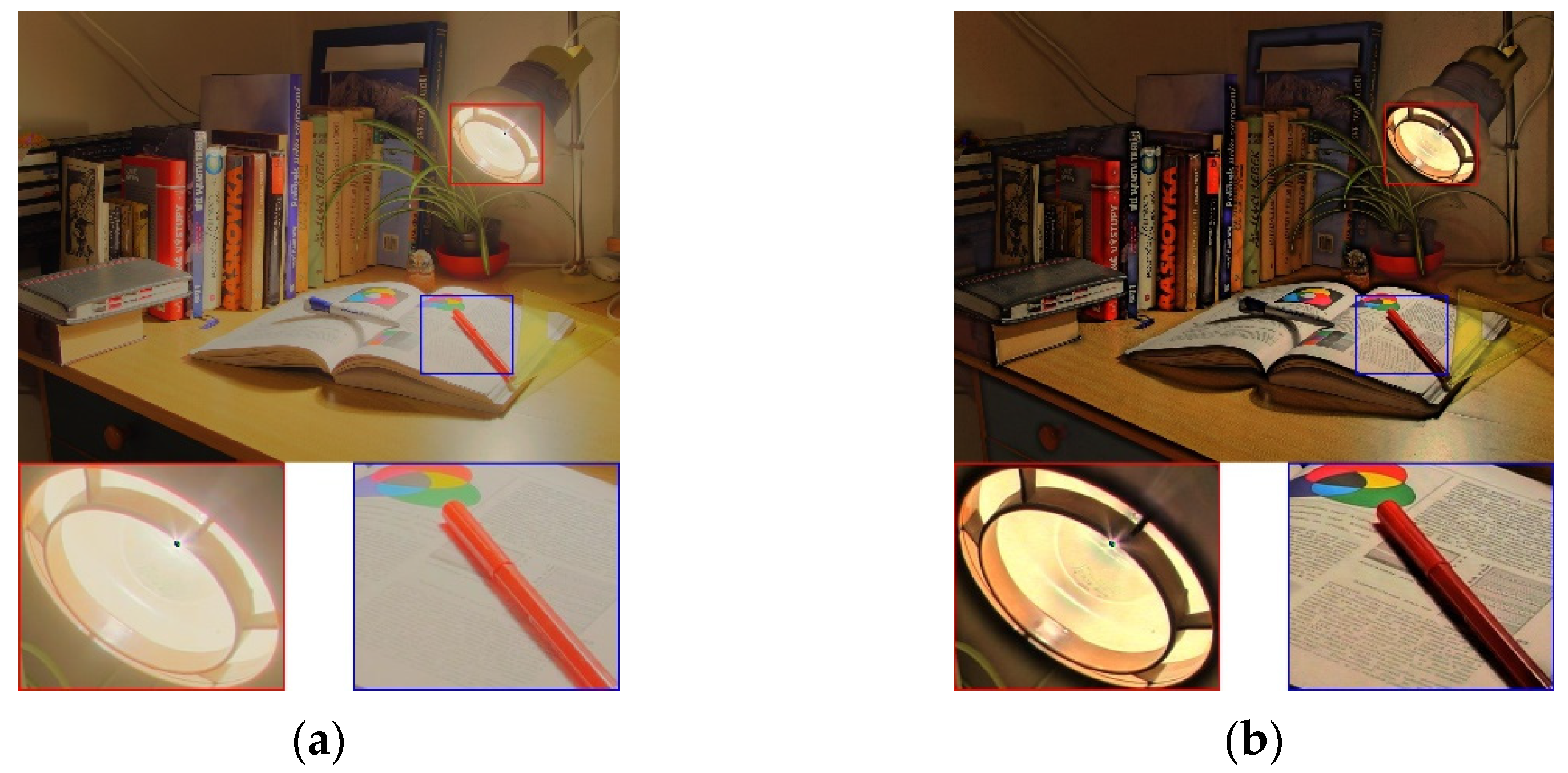
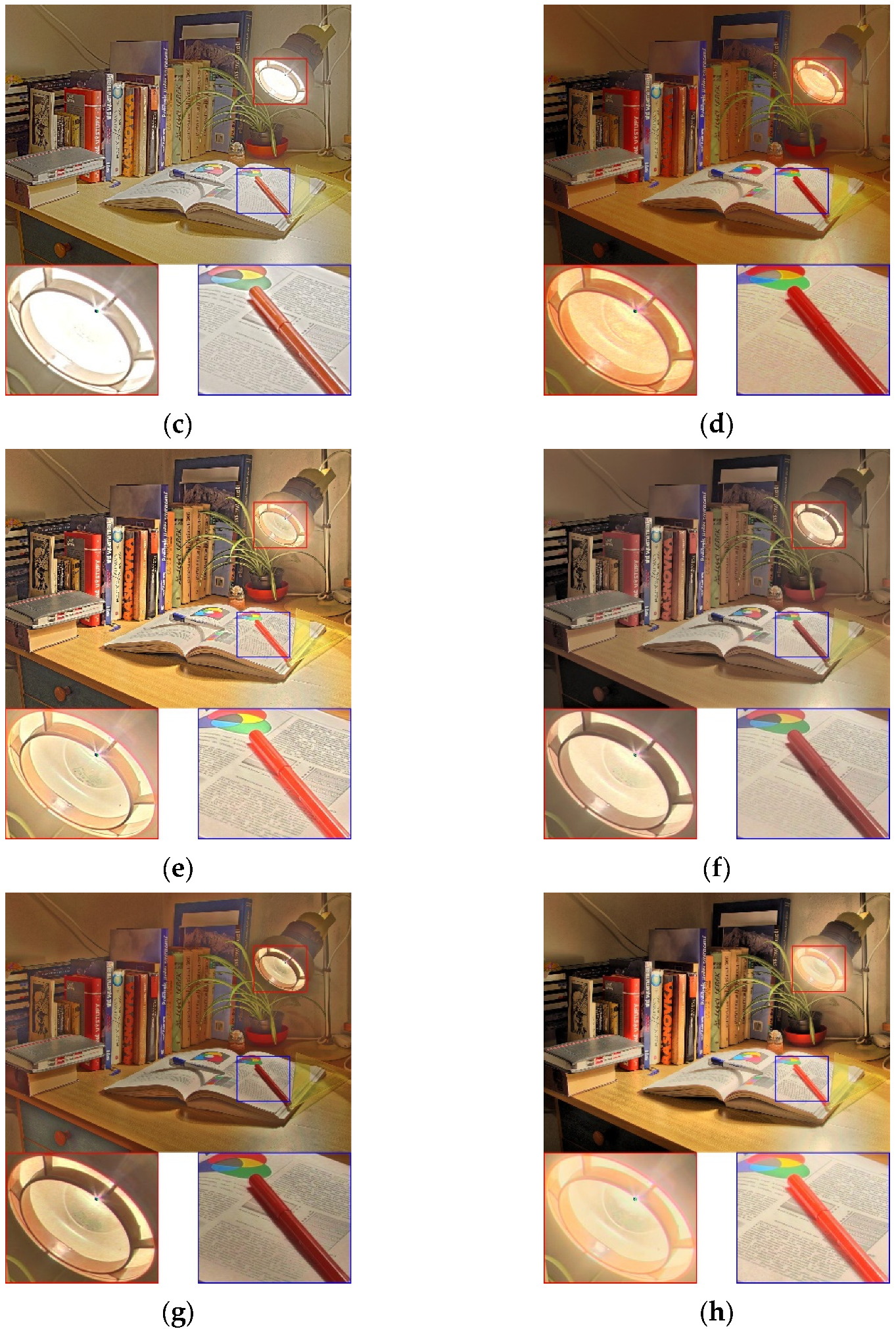
4. Experimental Results
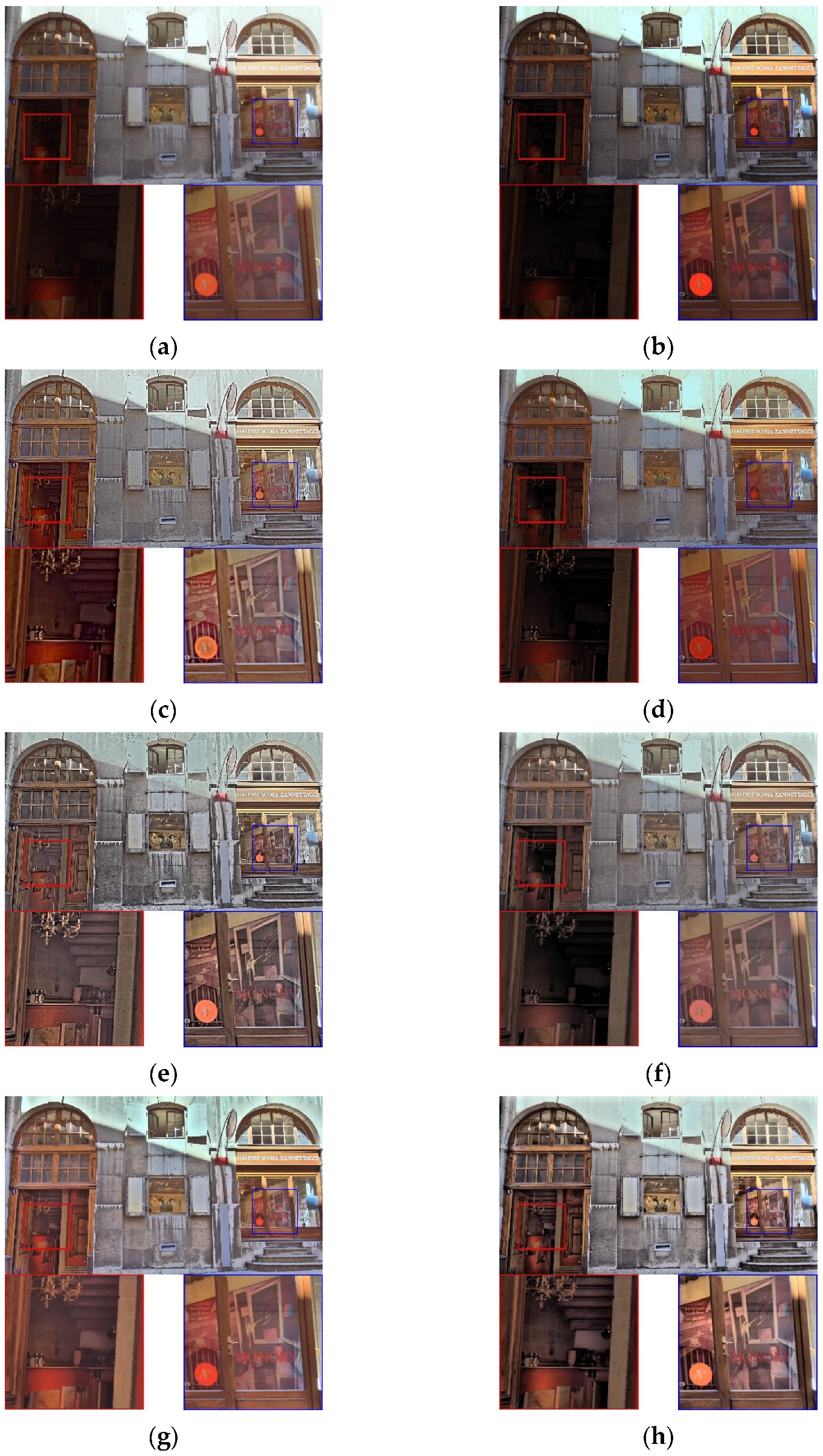
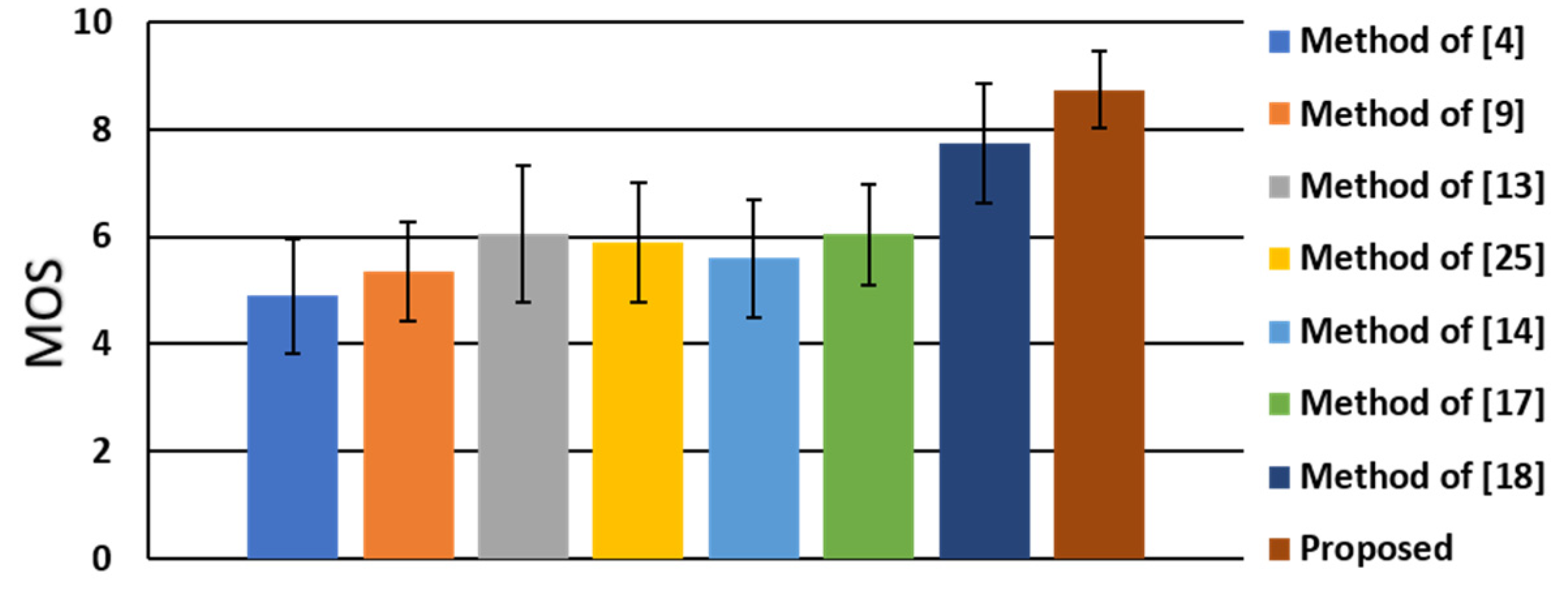
4.1. Subjective Analysis
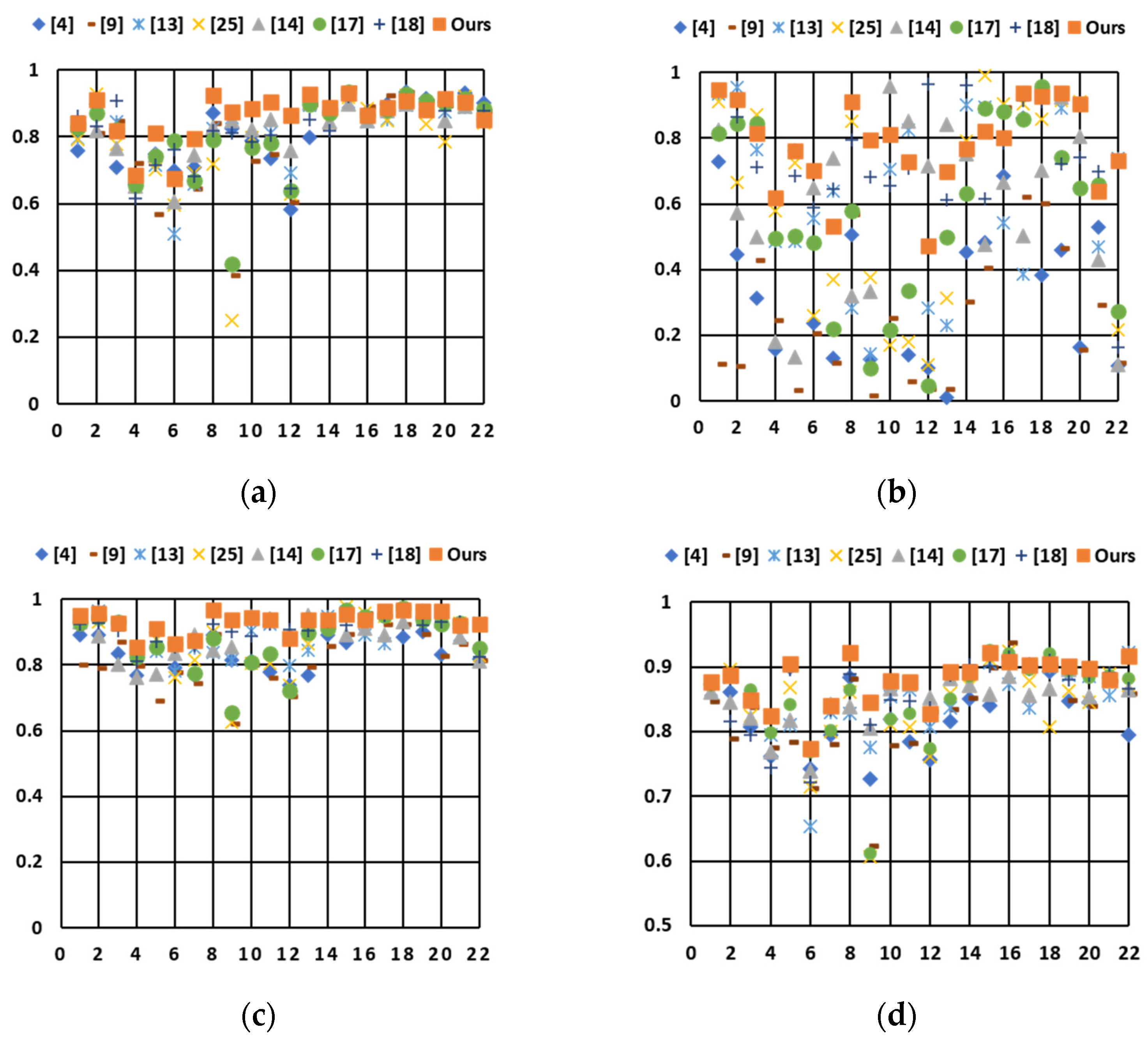
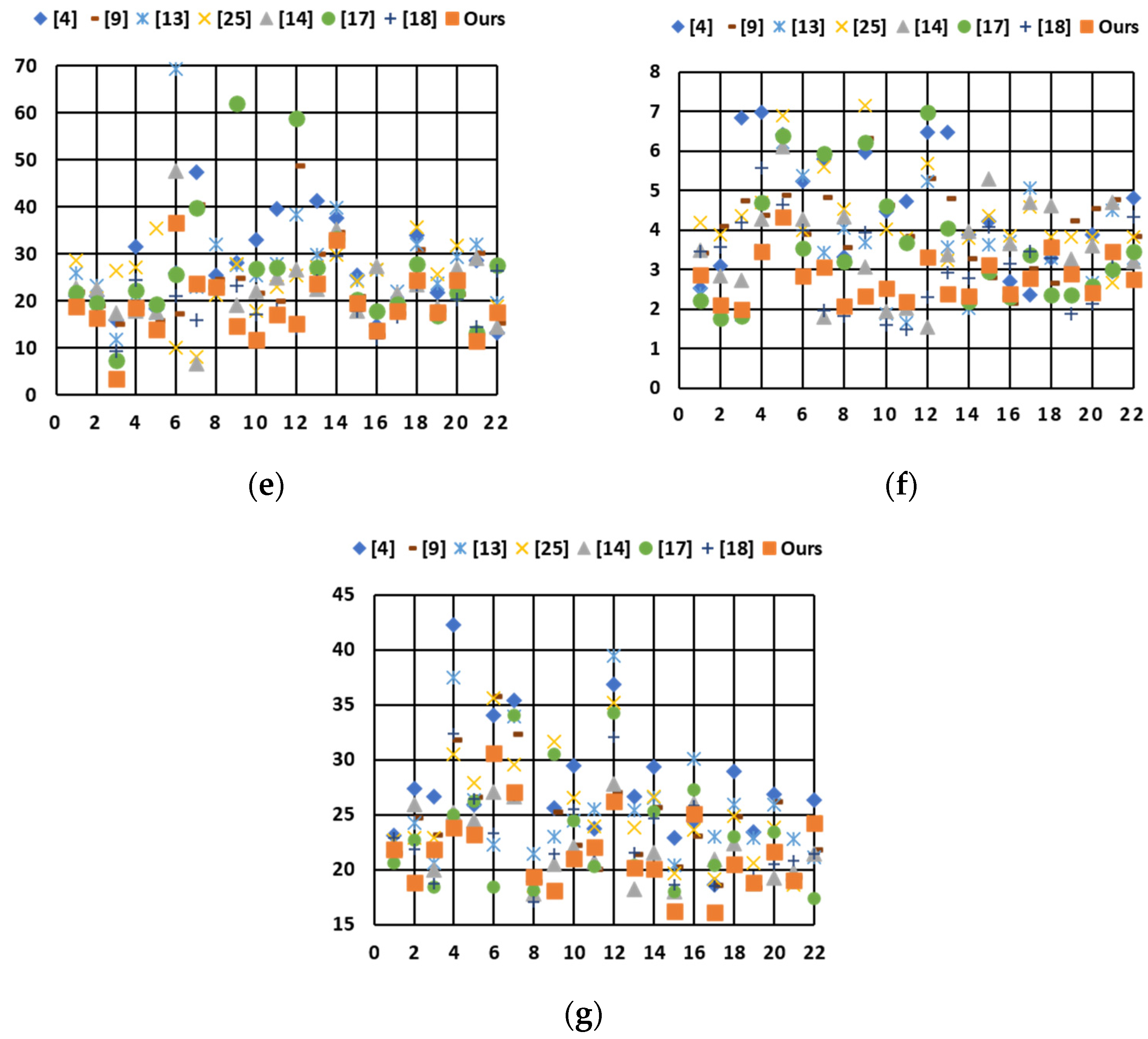
4.2. Objective Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, Z.; Yu, M.; Jiang, G.; Xu, H.; Peng, Z.; Chen, F. Multi-exposure high dynamic range imaging with informative content enhanced network. Neurocomputing 2020, 386, 147–164. [Google Scholar] [CrossRef]
- Boukhayma, A.; Caizzone, A.; Enz, C. A CMOS image sensor pixel combining deep sub-electron noise with wide dynamic range. IEEE Electron Device Lett. 2020, 41, 880–883. [Google Scholar] [CrossRef]
- Garcia, D.V.; Rojo, L.F.; Aparicio, A.G.; Castello, L.P.; Garcia, O.R. Visual odometry through appearance- and feature-based method with omnidirectional images. J. Robot. 2012, 2012, 1–13. [Google Scholar] [CrossRef]
- Reinhard, E.; Devlin, K. Dynamic range reduction inspired by photoreceptor physiology. IEEE Trans. Vis. Comput. Graph. 2005, 11, 13–24. [Google Scholar] [CrossRef] [PubMed]
- Mantiuk, R.; Daly, S.; Kerofsky, L. Display adaptive tone mapping. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar] [CrossRef]
- Kim, B.; Park, R.; Chang, S. Tone mapping with contrast preservation and lightness correction in high dynamic range imaging. Signal Image Video Process. 2016, 10, 1425–1432. [Google Scholar] [CrossRef]
- Gommelet, D.; Roumy, A.; Guillemot, C.; Ropert, M.; Tanou, J.L. Gradient-based tone mapping for rate-distortion optimized backward-compatible high dynamic range compression. IEEE Trans. Image Process. 2017, 26, 5936–5949. [Google Scholar] [CrossRef]
- Khan, I.R.; Rahardja, S.; Khan, M.M.; Movania, M.M.; Abed, F. A tone-mapping technique based on histogram using a sensitivity model of the human visual system. IEEE Trans. Ind. Electron. 2018, 65, 3469–3479. [Google Scholar] [CrossRef]
- Ahn, H.; Keum, B.; Kim, D.; Lee, H.S. Adaptive local tone mapping based on retinex for high dynamic range images. In Proceedings of the 2013 IEEE International Conference on Consumer Electronics, Las Vegas, NV, USA, 11–14 January 2013; pp. 153–156. [Google Scholar]
- Tan, L.; Liu, X.; Xue, K. A retinex-based local tone mapping algorithm using L0 smoothing filter. In Proceedings of the Chinese Conference on Image and Graphics Technologies, Beijing, China, 19–20 June 2014; pp. 40–47. [Google Scholar]
- Cyriac, P.; Bertalmio, M.; Kane, D.; Corral, J.V. A tone mapping operator based on neural and psychophysical models of visual perception. In Proceedings of the Human Vision and Electronic Imaging XX, San Francisco, CA, USA, 17 March 2015; pp. 1–10. [Google Scholar]
- Croci, S.; Aydın, T.O.; Stefanoski, N.; Gross, M.; Smolic, A. Real-time temporally coherent local HDR tone mapping. In Proceedings of the 2016 IEEE International Conference on Image Processing, Phoenix, AZ, USA, 25–28 September 2016; pp. 1–5. [Google Scholar]
- Li, H.; Jia, X.; Zhang, L. Clustering based content and color adaptive tone mapping. Comput. Vis. Image Underst. 2018, 168, 37–49. [Google Scholar] [CrossRef]
- Gu, B.; Li, W.; Zhu, M.; Wang, M. Local edge-preserving multiscale decomposition for high dynamic range image tone mapping. IEEE Trans. Image Process. 2013, 22, 70–79. [Google Scholar] [CrossRef]
- Barai, N.R.; Kyan, M.; Androutsos, D. Human visual system inspired saliency guided edge preserving tone-mapping for high dynamic range imaging. In Proceedings of the 2017 IEEE International Conference on Image Processing, Beijing, China, 17–20 September 2017; pp. 1017–1021. [Google Scholar]
- Mezeni, E.; Saranovac, L.V. Enhanced local tone mapping for detail preserving reproduction of high dynamic range images. J. Vis. Commun. Image Represent. 2018, 53, 122–133. [Google Scholar] [CrossRef]
- Liang, Z.; Xu, J.; Zhang, D.; Cao, Z.; Zhang, L. A hybrid L1-L0 layer decomposition model for tone mapping. In Proceedings of the 2018 IEEE International Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 1–9. [Google Scholar]
- Miao, D.; Zhu, Z.; Bai, Y.; Jiang, G.; Duan, Z. Novel tone mapping method via macro-micro modeling of human visual system. IEEE Access 2019, 7, 118359–118369. [Google Scholar] [CrossRef]
- Kim, M.; Kautz, J. Consistent tone reproduction. In Proceedings of the 10th IASTED International Conference on Computer Graphics and Imaging, Anaheim, CA, USA, 6 February 2008; pp. 152–159. [Google Scholar]
- Koirala, P.; Hauta-Kasari, M.; Parkkinen, J. Highlight removal from single image. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems, Bordeaux, France, 28 September 2009; pp. 176–187. [Google Scholar]
- Lai, Y.; Chung, K.; Lin, G.; Chen, C. Gaussian mixture modeling of histograms for contrast enhancement. Expert Syst. Appl. 2012, 39, 6720–6728. [Google Scholar] [CrossRef]
- Liu, Y.-F.; Guo, J.-M.; Yu, J.-C. Contrast enhancement using stratified parametric-oriented histogram equalization. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 1171–1181. [Google Scholar] [CrossRef]
- Liu, Y.-F.; Guo, J.-M.; Lai, B.-S.; Lee, J.-D. High efficient contrast enhancement using parametric approximation. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 2444–2448. [Google Scholar]
- Vazquez-Leal, H.; Castaneda-Sheissa, R.; Filobello-Nino, U.; Sarmiento-Reyes, A.; Orea, J.S. High accurate simple approximation of normal distribution integral. Math. Probl. Eng. 2012, 2012, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Gao, S.; Tan, M.; He, Z.; Li, Y. Tone mapping beyond the classical receptive field. IEEE Trans. Image Process. 2020, 29, 4174–4187. [Google Scholar] [CrossRef]
- Yeganeh, H.; Wang, Z. Objective quality assessment of tone mapped images. IEEE Trans. Image Process. 2013, 22, 657–667. [Google Scholar] [CrossRef] [PubMed]
- Anyhere Database. Available online: http://www.anyhere.com/ (accessed on 30 August 2020).
- Mignotte, M. Non-local pairwise energy-based model for the high-dynamic-range image compression problem. J. Electron. Imaging 2012, 21, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Cadik Database. Available online: http://cadik.posvete.cz/tmo/ (accessed on 23 August 2020).
- Nemoto, H.; Korshunov, P.; Hanhart, P.; Ebrahimi, T. Visual attention in LDR and HDR images. In Proceedings of the 9th International Workshop on Video Processing and Quality Metrics for Consumer Electronics, Chandler, AZ, USA, 5–6 February 2015; pp. 1–6. [Google Scholar]
- Nafchi, H.Z.; Shahkolaei, A.; Moghaddam, R.F.; Cheriet, M. FSITM: A feature similarity index for tone-mapped images. IEEE Signal Process. Lett. 2015, 22, 1026–1029. [Google Scholar] [CrossRef] [Green Version]
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-reference image quality assessment in the spatial domain. IEEE Trans. Image Process. 2012, 21, 4695–4708. [Google Scholar] [CrossRef]
- Gu, K.; Wang, S.; Zhai, G.; Ma, S.; Yang, X.; Lin, W.; Zhang, W.; Gao, W. Blind quality assessment of tone-mapped images via analysis of information, naturalness and structure. IEEE Trans. Multimed. 2016, 18, 432–443. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Bovik, A. A feature-enriched completely blind image quality evaluator. IEEE Trans. Image Process. 2015, 24, 2579–2591. [Google Scholar] [CrossRef] [PubMed] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TMQI-S (Structural Similarity) | ||||||||
| Method | [4] | [9] | [13] | [25] | [14] | [17] | [18] | Ours |
| Synagoguei | 0.8724 | 0.8414 | 0.8254 | 0.7177 | 0.8266 | 0.7906 | 0.8191 | 0.9241 |
| Cadik_Desk02 | 0.7338 | 0.7465 | 0.8116 | 0.7883 | 0.8516 | 0.7815 | 0.8037 | 0.9049 |
| C33_Store | 0.9342 | 0.9326 | 0.8924 | 0.9235 | 0.8972 | 0.9255 | 0.9090 | 0.9072 |
| Average | 0.8468 | 0.8402 | 0.8431 | 0.8098 | 0.8584 | 0.8326 | 0.8439 | 0.9121 |
| TMQI-N (Naturalness) | ||||||||
| Synagoguei | 0.5045 | 0.5690 | 0.2826 | 0.8492 | 0.3186 | 0.5785 | 0.7930 | 0.9113 |
| Cadik_Desk02 | 0.1387 | 0.0615 | 0.8236 | 0.1790 | 0.8517 | 0.3349 | 0.7084 | 0.7269 |
| C33_Store | 0.3809 | 0.6014 | 0.9239 | 0.8563 | 0.6999 | 0.9555 | 0.9104 | 0.9278 |
| Average | 0.3414 | 0.4106 | 0.6767 | 0.6282 | 0.6234 | 0.6230 | 0.8039 | 0.8554 |
| TMQI-Q (Overall Quality) | ||||||||
| Synagoguei | 0.8910 | 0.8934 | 0.8369 | 0.9013 | 0.8444 | 0.8808 | 0.9226 | 0.9683 |
| Cadik_Desk02 | 0.7781 | 0.7605 | 0.9251 | 0.8039 | 0.9403 | 0.8348 | 0.9251 | 0.9358 |
| C33_Store | 0.8851 | 0.9230 | 0.9633 | 0.9601 | 0.9295 | 0.9750 | 0.9642 | 0.9663 |
| Average | 0.8514 | 0.8590 | 0.9084 | 0.8884 | 0.9048 | 0.8969 | 0.9373 | 0.9568 |
| No. | Name | D | No. | Name | D |
|---|---|---|---|---|---|
| 1 | Belgium | 5.87 | 12 | Cadik_Window | 5.10 |
| 2 | Fop_map | 4.12 | 13 | C19_Casement | 2.46 |
| 3 | Mt. Tam West | 4.06 | 14 | C21_Studio | 2.88 |
| 4 | Napa_Valley | 5.36 | 15 | C22_Fort | 2.79 |
| 5 | Rend01 | 5.84 | 16 | C29_Buildings | 3.52 |
| 6 | Still_Life | 3.91 | 17 | C31_Parasol | 3.57 |
| 7 | Spheron_Siggraph | 5.01 | 18 | C33_Store | 2.57 |
| 8 | Synagogue | 2.58 | 19 | C37_Sculptures | 4.17 |
| 9 | Design Center | 5.25 | 20 | C38_Cross | 3.65 |
| 10 | Cadik_Desk01 | 5.68 | 21 | Spheron_PriceWestern | 3.73 |
| 11 | Cadik_Desk02 | 4.26 | 22 | Memorial | 5.53 |
| Method | [4] | [9] | [13] | [25] | [14] | [17] | [18] | Ours |
|---|---|---|---|---|---|---|---|---|
| TMQI-S | 0.8144 | 0.7946 | 0.8085 | 0.7737 | 0.8197 | 0.8066 | 0.8199 | 0.8606 |
| TMQI-N | 0.3631 | 0.2765 | 0.6334 | 0.6143 | 0.5898 | 0.5689 | 0.7258 | 0.7805 |
| TMQI-Q | 0.8464 | 0.8185 | 0.8906 | 0.8734 | 0.8838 | 0.8776 | 0.9046 | 0.9308 |
| FSITM-TMQI | 0.8314 | 0.8265 | 0.8462 | 0.8340 | 0.8475 | 0.8487 | 0.8571 | 0.8784 |
| BRISQUE | 28.9897 | 23.6616 | 28.2828 | 23.6827 | 22.9164 | 26.2905 | 18.9477 | 18.9413 |
| BTMQI | 4.5153 | 4.0962 | 3.4366 | 4.3851 | 3.5776 | 3.6170 | 3.1737 | 2.7792 |
| IL-NIQE | 27.0699 | 24.0626 | 25.6440 | 25.1176 | 22.0920 | 22.9561 | 22.8037 | 21.6186 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.-H.; Hua, K.-L.; Chen, Y.-Y.; Chen, I.-Y.; Tsai, Y.-C. A New Photographic Reproduction Method Based on Feature Fusion and Virtual Combined Histogram Equalization. Sensors 2021, 21, 6038. https://doi.org/10.3390/s21186038
Lin Y-H, Hua K-L, Chen Y-Y, Chen I-Y, Tsai Y-C. A New Photographic Reproduction Method Based on Feature Fusion and Virtual Combined Histogram Equalization. Sensors. 2021; 21(18):6038. https://doi.org/10.3390/s21186038
Chicago/Turabian StyleLin, Yu-Hsiu, Kai-Lung Hua, Yung-Yao Chen, I-Ying Chen, and Yun-Chen Tsai. 2021. "A New Photographic Reproduction Method Based on Feature Fusion and Virtual Combined Histogram Equalization" Sensors 21, no. 18: 6038. https://doi.org/10.3390/s21186038