
A Novel Approach for Development and Evaluation of LiDAR Navigated Electronic Maize Seeding System Using Check Row Quality Index


 , , , and
, , , and
Abstract
:
1. Introduction
2. Materials and Methods
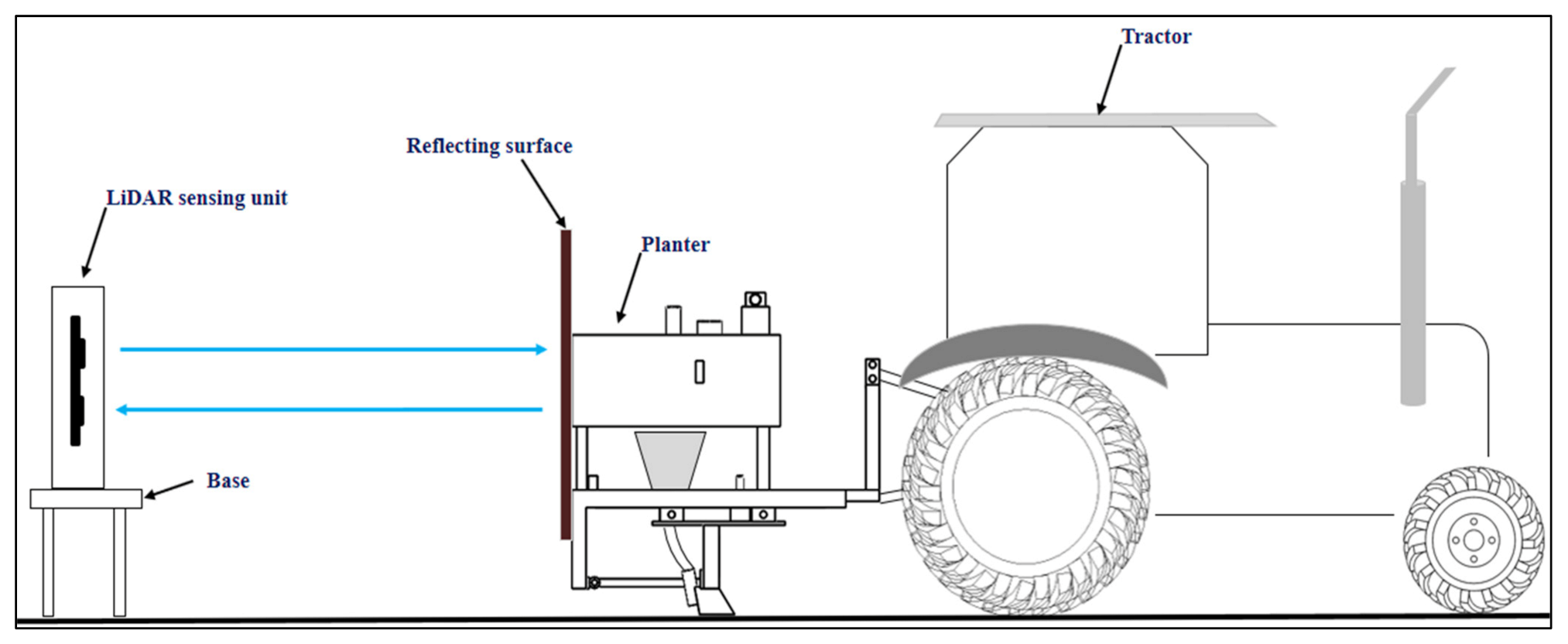
2.1. Development of the Distance Measurement Unit for Precise Positioning of Seeds
2.2. Calibration of the LIDAR Distance Sensor in the Laboratory
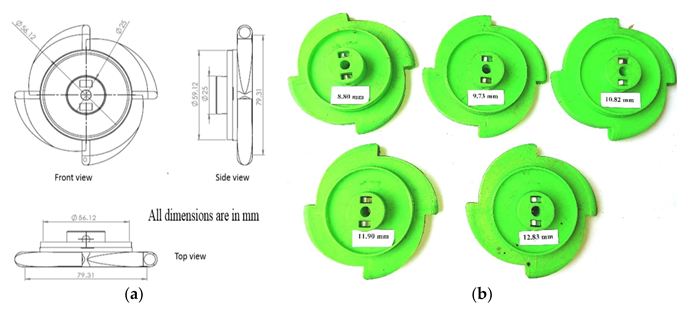
2.3. Design of the Seed Metering Mechanism
2.4. Uniformity Test of Seed Metering Mechanism in Laboratory
2.5. Development of the Light Dependent Resistor (LDR)-Based Seed Flow Sensing System for the Seed Metering Mechanism
2.6. Laboratory Evaluation of Seed Flow Sensing System
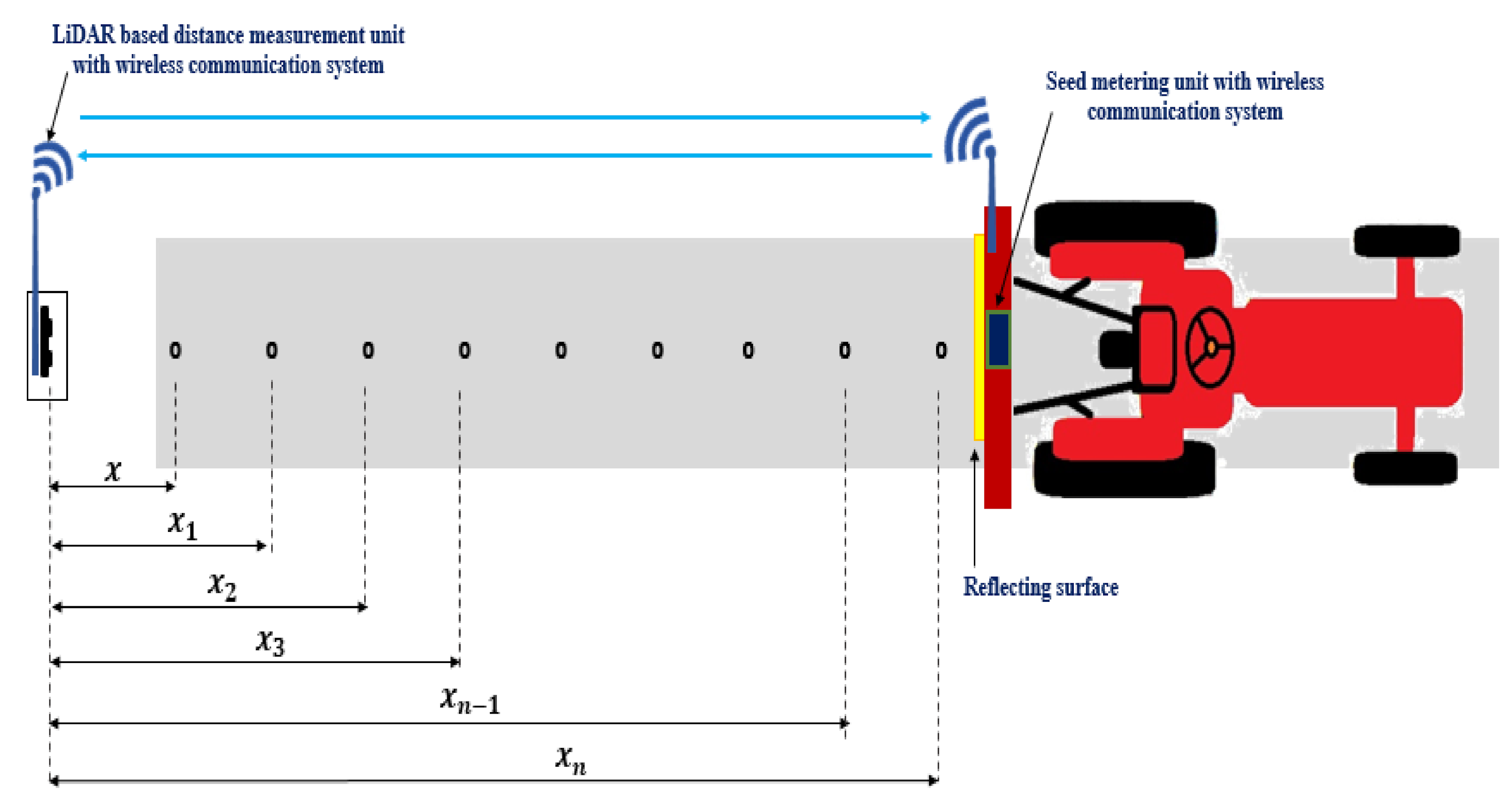
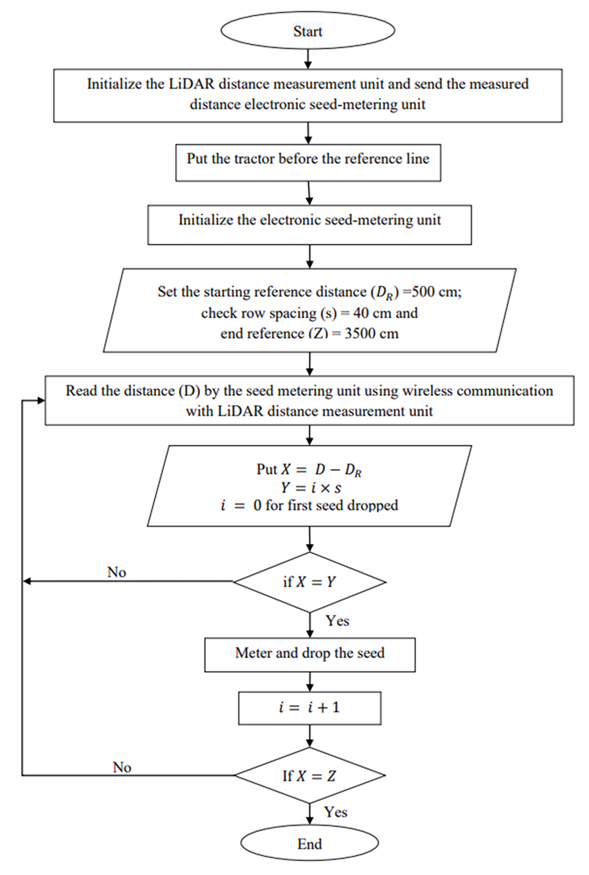
2.7. Development of the LiDAR Navigated Electronic Seed Metering System for Check Row Planting
2.8. Performance Evaluation of the LiDAR Navigated Electronic Seed Metering System to Check the Seed Placement Pattern
- i.
- Four seeds were taken in successive rows, as shown in Figure 13, to form a quadrilateral.
- ii.
- Spacings between seeds 1 and 2, 2 and 3, and 3 and 4, were named as , and respectively. Both and were considered as opposite sides of quadrilateral across the rows, where as was considered as side of quadrilateral along the row.
- iii.
- Spacings between seeds 1 and 3, and 2 and 4, were named as and respectively. Both and were considered as opposite diagonals of the quadrilateral.
3. Results and Discussion
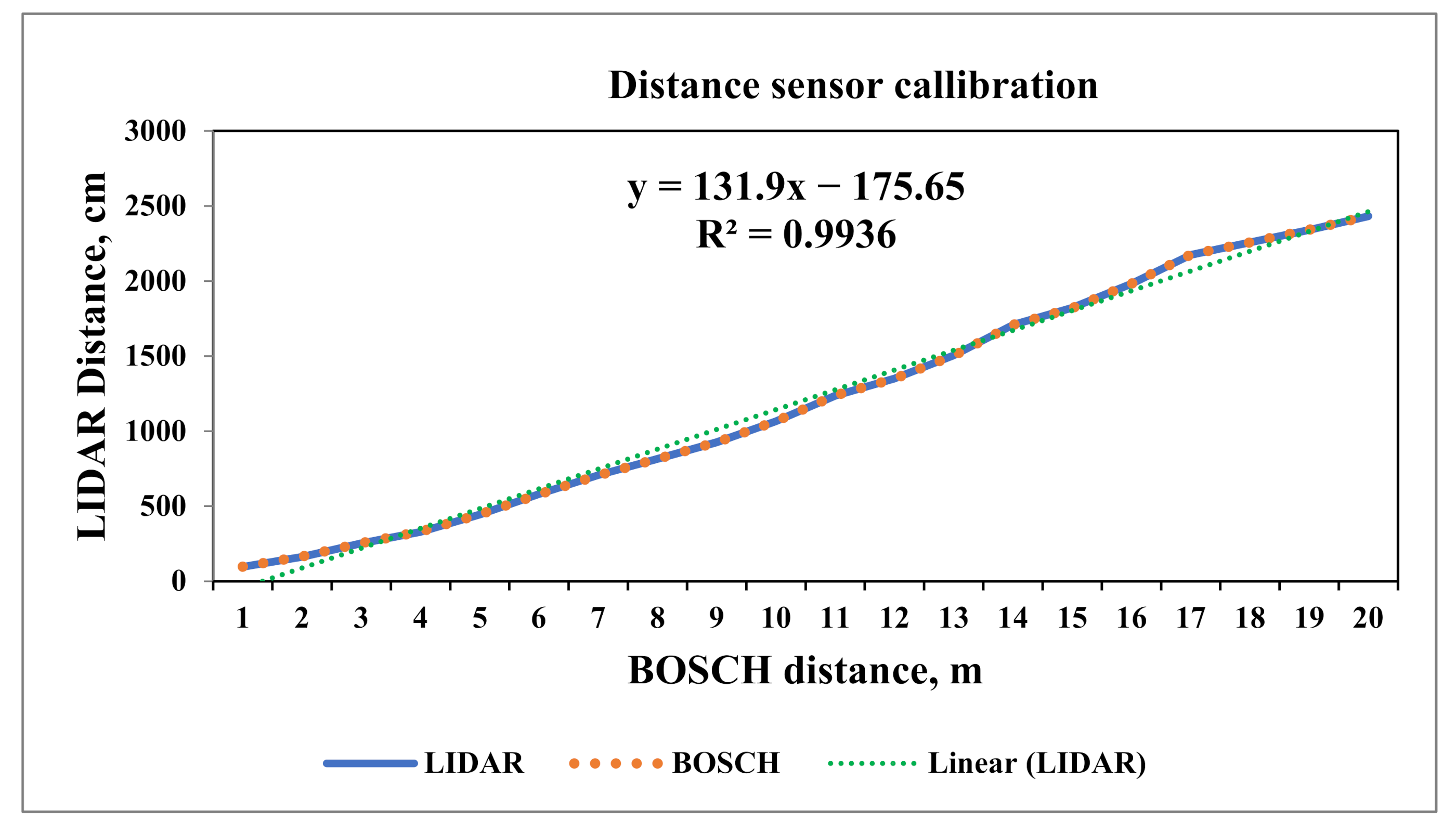
3.1. Comparison of Distance Sensors
3.2. Effect of the Linear Speed of Cell and Cell Size on the Performance Parameters of the Seed Metering Unit
3.2.1. Effect of Cell Size and Linear Speed of Cell on Mean Seed Spacing
3.2.2. Effect of Cell Size and Linear Speed of Cell on the Multiple Index
3.2.3. Effect of Cell Size and Linear Speed of Cell on Quality of Feed Index
3.2.4. Effect of Cell Size and Linear Speed of the Cell on the Miss Index
3.2.5. Effect of Cell Size and Linear Speed of Cell on the Precision
3.3. Performance Evaluation of the Seed Flow Sensing System in the Laboratory
3.4. Performance Evaluation of the LiDAR Navigated Electronic Seed Metering System in the Laboratory to Check the Seed Placement Pattern
4. Conclusions
- (1)
- A LiDAR-based distance measurement unit was calibrated, and it was found that the distance measured by it was close to that of the Bosch laser distance meter with a mean deviation of 4.05 mm over a measured linear distance of 40 m.
- (2)
- The linear speed of the cell and cell size influenced the performance of the seed metering mechanism. The variation of mean seed spacing with linear cell speed and cell size did not follow a particular pattern. The highest variation in mean seed spacing was observed at a linear cell speed of 133.72 mm·s−1 and cell size of 8.80 mm due to multiple seed dropping.
- (3)
- The The multiple index increased with the increase in linear speed of the cell because less time was available for the seeds to drop from the cell. The lowest multiple index of 7% was observed at a linear cell speed of 89.15 mm·s−1 and cell size of 12.83 mm.
- (4)
- Quality of feed index increased with the decrease in linear speed of the cell because at higher speed the multiple index and miss index were high. It also increased with cell size. The maximum quality of feed index (QFI) of 85.33% was found at a linear cell speed of 89.15 mm·s−1 and cell size of 12.83 mm.
- (5)
- Miss index decreased with the decrease in linear speed of the cell for all cell sizes. The miss index was higher for a smaller cell size. At higher speed, a smaller sized cell missed the seeds in the hopper due to less exposure time. The highest miss index of 20% was observed at a linear cell speed of 133 mm·s−1 and cell size of 8.80 mm.
- (6)
- The precision or coefficient of variation increased with the increase in linear cell speed. The least precision of 14.52% was observed at a linear cell speed of 89.15 mm·s−1.
- (7)
- The seed flow sensing system was able to measure the lag time between the seed picking in the seed box and the seed flow through the bottom of the seed tube. The average seed fall lag time was 251.25.39 ms at the optimised linear cell speed of 99.46 mm·s−1 and forward speed of 2 km·h−1.
- (8)
- The LiDAR navigated electronic seed metering system could maintain the check row planting pattern at a speed of 2 km·h−1 and 3 km·h−1 with a check row quality index () of 0.88 to 1.10 and 0.85 to 1.17, respectively. At 5 km·h−1, a higher standard deviation (14.14%) of the check row quality index () was obtained due to more vibration and side wise movement of planter.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Performance Parameters of the Electronic Seed Metering Units
Appendix A.1. Mean Spacing
Appendix A.2. Multiple Index
Appendix A.3. Miss Index
Appendix A.4. Quality of Feed Index
Appendix A.5. Precision
References
- Srivastava, A.; Sahoo, B.; Raghuwanshi, N.S.; Singh, R. Evaluation of variable-infiltration capacity model and MODIS-terra satellite-derived grid-scale evapotranspiration estimates in a River Basin with Tropical Monsoon-Type climatology. J. Irrig. Drain. Eng. 2017, 143, 04017028. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, A.; Kumari, N.; Maza, M. Hydrological response to agricultural land use heterogeneity using variable infiltration capacity model. Water Resour. Manag. 2020, 34, 3779–3794. [Google Scholar] [CrossRef]
- Kumari, N.; Srivastava, A. An approach for estimation of evapotranspiration by standardizing parsimonious method. Agric. Res. 2020, 9, 301–309. [Google Scholar] [CrossRef]
- Kumari, N.; Srivastava, A.; Sahoo, B.; Raghuwanshi, N.S.; Bretreger, D. Identification of Suitable Hydrological Models for Streamflow Assessment in the Kangsabati River Basin, India, by Using Different Model Selection Scores. Nat. Resour. Res. 2021. [Google Scholar] [CrossRef]
- Agricultural Statistics at a Glance. Directorate of Economics and Statistics, Department of Agriculture, Cooperation and Farmers Welfare. 2019. Available online: http://eands.dacnet.nic.in (accessed on 20 April 2021).
- Rajaiah, P.; Mani, I.; Kumar, A.; Lande, S.D.; Singh, A.K.; Vergese, C. Development and evaluation of electronically controlled precision seed-metering device for direct-seeded paddy planter. Indian J. Agric. Sci. 2016, 86, 598–604. [Google Scholar]
- Barut, Z.B.; Yigit, K. Design of Electronic-Based Measurement System for Seed Spacing Measurement in Precision Planters. In Proceedings of the 10th International Congress on Mechanization and Energy in Agriculture, Antalya, Turkiye, 14–17 October 2008. [Google Scholar]
- Shinde, P.R.; Lende, A.B.; Rane, S.V.; Nawale, S.A.; Patwardhan, M.S.; Gharate, L.V. Development and functional test of electronic metering mechanism for bullock drawn Jyoti Multicrop planter. Int. J. Agric. Environ. Biotechnol. 2009, 2, 305–309. [Google Scholar]
- Hajahmed, O.; Tola, E.; Al-Gaadi, K.A.; Kheiralla, A.F. Development of an Opto-Electronic Monitoring System for Crop Planter Seed Metering Unit. Middle-East J. Sci. Res. 2011, 8, 732–738. [Google Scholar]
- Singh, T.P.; Mane, D.M. Development and laboratory performance of an electronically controlled metering mechanism for okra seed. AMA-Agric. Mech. Asia Afr. Lat. Am. 2011, 42, 63. [Google Scholar]
- Kaur, T.; Kumar, D. Design and development of calibration unit for precision planter. Int. J. Comput. Sci. Eng. Appl. 2013, 3, 11. [Google Scholar] [CrossRef]
- Jianbo, Z.; Junfang, X.; Yong, Z.; Shun, Z. Design and experimental study of the control system for precision seed-metering device. Int. J. Agric. Biol. Eng. 2014, 7, 13–18. [Google Scholar]
- Iacomi, C.; Popescu, O. A new concept for seed precision planting. Agric. Agric. Sci. Procedia 2015, 6, 38–43. [Google Scholar] [CrossRef] [Green Version]
- Jiangtao, Q.; Honglei, J.; Yang, L.; Haibo, Y.; Xinhui, L.; Yubin, L.; Yongxi, Y. Design and test of fault monitoring system for corn precision planter. Int. J. Agric. Biol. Eng. 2015, 8, 13–19. [Google Scholar]
- Yang, L.; He, X.; Cui, T.; Zhang, D.; Shi, S.; Zhang, R.; Wang, M. Development of mechatronic driving system for seed meters equipped on conventional precision corn planter. Int. J. Agric. Biol. Eng. 2015, 8, 1–9. [Google Scholar]
- Kocabiyik, H.; Cay, A.; Karaaslan, B.; May, S.; Khurelbaatar, M. Electro-mechanic Control System for Pneumatic Precision Corn Planters. In Proceedings of the International Conference on Machine Control and Guidance, Vichy, France, 5–6 October 2016. [Google Scholar]
- Koley, S.; Bhatt, Y.C.; Singh, G.; Joshi, S.; Jain, H.K. Development of Electronic Metering Mechanism for Precision Planting of Seeds. Int. J. Curr. Microbiol. Appl. Sci. 2017, 6, 3481–3487. [Google Scholar] [CrossRef] [Green Version]
- Manjunath. Design and Development of Sensor-Controlled Mechanism of Seed Metering for Check Row Planting. Unpublished Master’s Dissertation, Division of Agricultural Engineering, Indian Agricultural Research Institute, New Delhi, India, 2017. [Google Scholar]
- Merlo, A. Microwave Seed Sensor. U.S. Patent 4,246,469, 20 January 1981. [Google Scholar]
- Friend, K.D. Article or Seed Counter. U.S. Patent 4,635,215, 6 January 1987. [Google Scholar]
- Bachman, W.J. Capacitive-Type Seed Sensor for a Planter Monitor. U.S. Patent 4,782,282, 1 November 1988. [Google Scholar]
- Karayel, D.; Wiesehoff, M.; Özmerzi, A.; Müller, J. Laboratory measurement of seed drill seed spacing and velocity of fall of seeds using high-speed camera system. Comput. Electron. Agric. 2006, 50, 89–96. [Google Scholar] [CrossRef]
- Al-Mallahi, A.; Kataoka, T. Estimation of mass flow of seeds using fibre sensor and multiple linear regression modelling. Comput. Electron. Agric. 2013, 99, 116–122. [Google Scholar] [CrossRef]
- Al-Mallahi, A.; Kataoka, T. Application of fibre sensor in grain drill to estimate seed flow under field operational conditions. Comput. Electron. Agric. 2016, 121, 412–419. [Google Scholar] [CrossRef]
- Karimi, H.; Navid, H.; Besharati, B.; Behfar, H.; Eskandari, I. A practical approach to comparative design of non-contact sensing techniques for seed flow rate detection. Comput. Electron. Agric. 2017, 142, 165–172. [Google Scholar] [CrossRef]
- Kumar, R.; Raheman, H. Detection of flow of seeds in the seed delivery tube and choking of boot of a seed drill. Comput. Electron. Agric. 2018, 153, 266–277. [Google Scholar] [CrossRef]
- Liu, W.; Hu, J.; Zhao, X.; Pan, H.; Lakhiar, I.A.; Wang, W.; Zhao, J. Development and experimental analysis of a seeding quantity sensor for the precision seeding of small seeds. Sensors 2019, 19, 5191. [Google Scholar] [CrossRef] [Green Version]
- Pandey, M.K.; Verma, A.; Sirmaur, A.; Pandey, N. Evaluation and performance of the operated check row planter for dry seeding of rice. J. Pharmacogn. Phytochem. 2018, 7, 543–547. [Google Scholar]
- Karayel, D.; Barut, Z.B.; Ozmerzi, A. Mathematical modelling of vacuum pressure on a precision seeder. Biosyst. Eng. 2004, 87, 437–444. [Google Scholar] [CrossRef]
- Maleki, M.R.; Jafari, J.F.; Raufat, M.H.; Mouazen, A.M.; De Baerdemaeker, J. Evaluation of Seed Distribution Uniformity of a Multi-flight Auger as a Grain Drill Metering Device. Biosyst. Eng. 2006, 94, 535–543. [Google Scholar] [CrossRef]
- Gaikwad, B.B.; Sirohi, N.P.S. Design of a low-cost pneumatic seeder for nursery plug trays. Biosyst. Eng. 2008, 99, 322–329. [Google Scholar] [CrossRef]
- Johansena, C.; Haque, M.E.; Bell, R.W.; Thierfelder, C.; Esdailee, R.J. Conservation agriculture for smallholder rained farming: Opportunities and constraints of new mechanized seeding systems. Field Crops Res. 2012, 132, 18–32. [Google Scholar] [CrossRef] [Green Version]
- St Jack, D.; Hesterman, D.C.; Guzzomi, A.L. Precision metering of Santalum spicatum (Australian Sandalwood) seeds. Biosyst. Eng. 2013, 115, 171–183. [Google Scholar] [CrossRef]
- Sidhu, H.S.; Singh, M.; Singh, Y.; Blackwell, J.; Lohan, S.K.; Humphreys, E.; Jat, M.L.; Singh, V.; Singh, S. Development and evaluation of the Turbo Happy Seeder for sowing wheat into heavy rice residues in NW India. Field Crops Res. 2015, 184, 201–212. [Google Scholar] [CrossRef]
- RNAM. Agricultural Machinery Design and Data Handbook (Seeders and Planters); RNAM: Bangkok, Thailand, 1991. [Google Scholar]
- Sahoo, P.K.; Srivastava, A.P. Seed pattern characteristics of different metering systems for soaked okra seeds. J. Agric. Eng. 2008, 45, 1–6. [Google Scholar]
- Kachman, S.D.; Smith, J.A. Alternative measures of accuracy in plant spacing for planters using single seed metering. Trans. ASAE 1995, 38, 379–387. [Google Scholar] [CrossRef]
- International Standardization Organization. Sowing Equipment- Test Methods- Part I: Single Seed Drills (Precision Drills), 7256/1; ISO: Geneva, Switzerland, 1984. [Google Scholar]
- Kaldén, P. Development of a Low-Cost Laser Range-Finder (LIDAR). Unpublished. Master’s Thesis, Department of Microtech nology & Nanoscience, Chalmers University of Technology, Gothenburg, Sweden, 2015. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sl. No. | Property | Range | Mean | Standard Deviation | Coefficient of Variation (CV), % |
|---|---|---|---|---|---|
| 1 | Length (mm) | 8.88–12.83 | 10.93 | 0.91 | 8.38 |
| 2 | Breadth (mm) | 7.45–10.37 | 8.69 | 0.76 | 8.80 |
| 3 | Thickness (mm) | 3.46–4.93 | 4.213 | 0.53 | 12.71 |
| 4 | Geometric mean diameter (mm) | 6.53–8.31 | 7.348 | 0.45 | 6.14 |
| 5 | Sphericity | 0.58–0.76 | 0.67 | 0.04 | 6.57 |
| 6 | Aspect ratio | 0.62–0.98 | 0.79 | 0.08 | 10.29 |
| 7 | Angle of repose (degree) | 29.8–38.6 | 35.6 | 2.830 | 7.94 |
| 8 | Bulk density (kg·m−3) | 732.81–795.32 | 758.4 | 17.60 | 2.32 |
| 9 | Particle density (kg·m−3) | 1286.16–1352.88 | 1325 | 21.68 | 1.63 |
| 10 | Test weight (100 seeds, g) | 27.28–29.90 | 28.86 | 0.67 | 2.35 |
| Speed (km·h−1) | Parameters | Average | Standard Deviation (SD) |
|---|---|---|---|
| 2.0 | (cm) | 41.25 | 3.77 |
| (cm) | 40.37 | 3.49 | |
| (cm) | 41.53 | 3.33 | |
| (cm) | 56.99 | 4.13 | |
| (cm) | 57.38 | 4.08 | |
| 0.97 | 6.42 | ||
| 3.0 | (cm) | 42.67 | 4.84 |
| (cm) | 41.32 | 3.34 | |
| (cm) | 40.34 | 4.98 | |
| (cm) | 59.19 | 5.35 | |
| (cm) | 57.56 | 6.40 | |
| 0.98 | 9.86 | ||
| 5.0 | (cm) | 43.59 | 5.61 |
| (cm) | 39.65 | 6.70 | |
| (cm) | 40.26 | 5.26 | |
| (cm) | 60.81 | 7.72 | |
| (cm) | 61.07 | 7.65 | |
| 1.07 | 14.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pradhan, N.C.; Sahoo, P.K.; Kushwaha, D.K.; Mani, I.; Srivastava, A.; Sagar, A.; Kumari, N.; Sarkar, S.K.; Makwana, Y. A Novel Approach for Development and Evaluation of LiDAR Navigated Electronic Maize Seeding System Using Check Row Quality Index. Sensors 2021, 21, 5934. https://doi.org/10.3390/s21175934
Pradhan NC, Sahoo PK, Kushwaha DK, Mani I, Srivastava A, Sagar A, Kumari N, Sarkar SK, Makwana Y. A Novel Approach for Development and Evaluation of LiDAR Navigated Electronic Maize Seeding System Using Check Row Quality Index. Sensors. 2021; 21(17):5934. https://doi.org/10.3390/s21175934
Chicago/Turabian StylePradhan, Nrusingh Charan, Pramod Kumar Sahoo, Dilip Kumar Kushwaha, Indra Mani, Ankur Srivastava, Atish Sagar, Nikul Kumari, Susheel Kumar Sarkar, and Yash Makwana. 2021. "A Novel Approach for Development and Evaluation of LiDAR Navigated Electronic Maize Seeding System Using Check Row Quality Index" Sensors 21, no. 17: 5934. https://doi.org/10.3390/s21175934