
Development of a Low-Cost Electronic Nose for Detection of Pathogenic Fungi and Applying It to Fusarium oxysporum and Rhizoctonia solani

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Electronic Nose
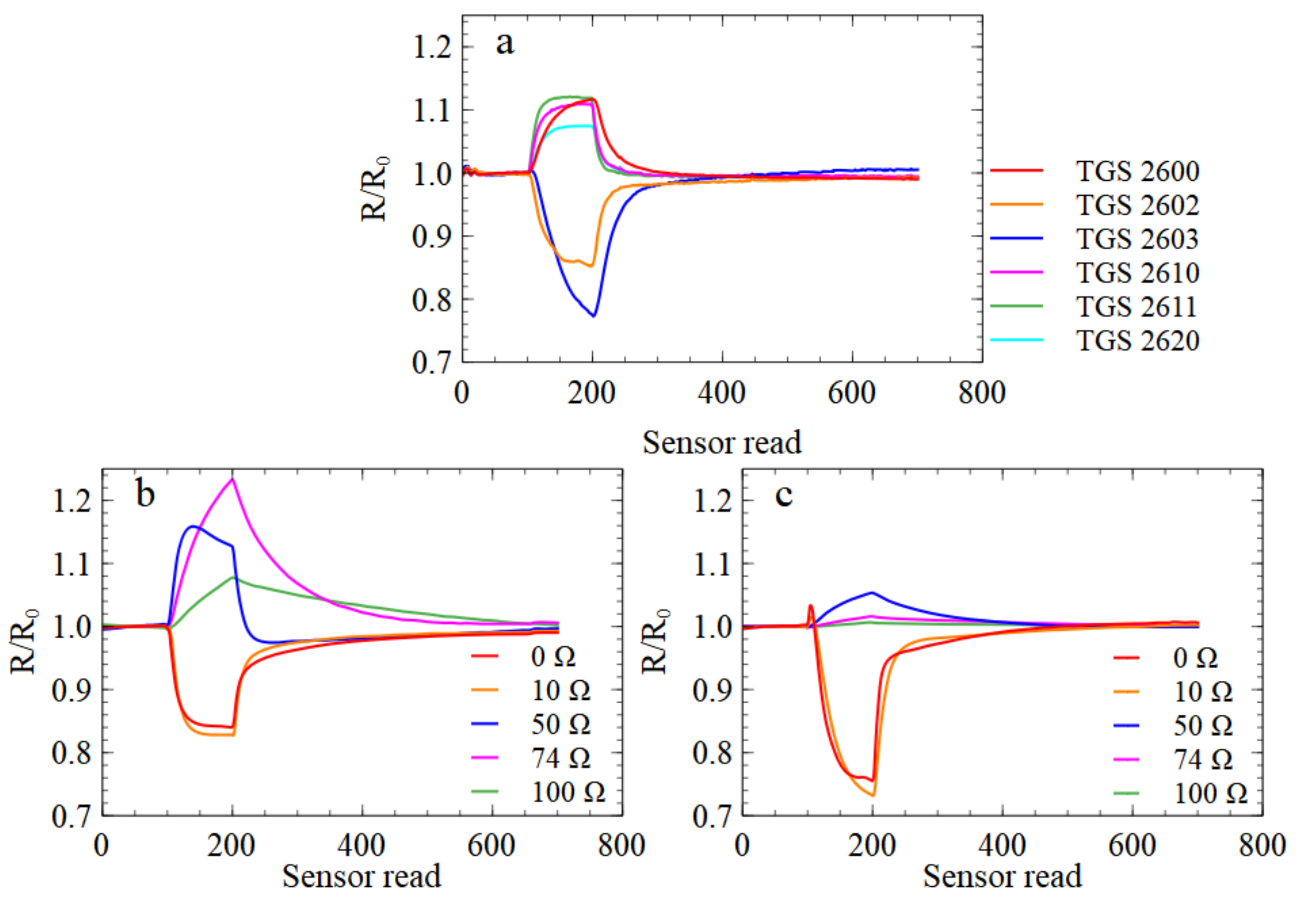
2.1. Sensor Array Selection
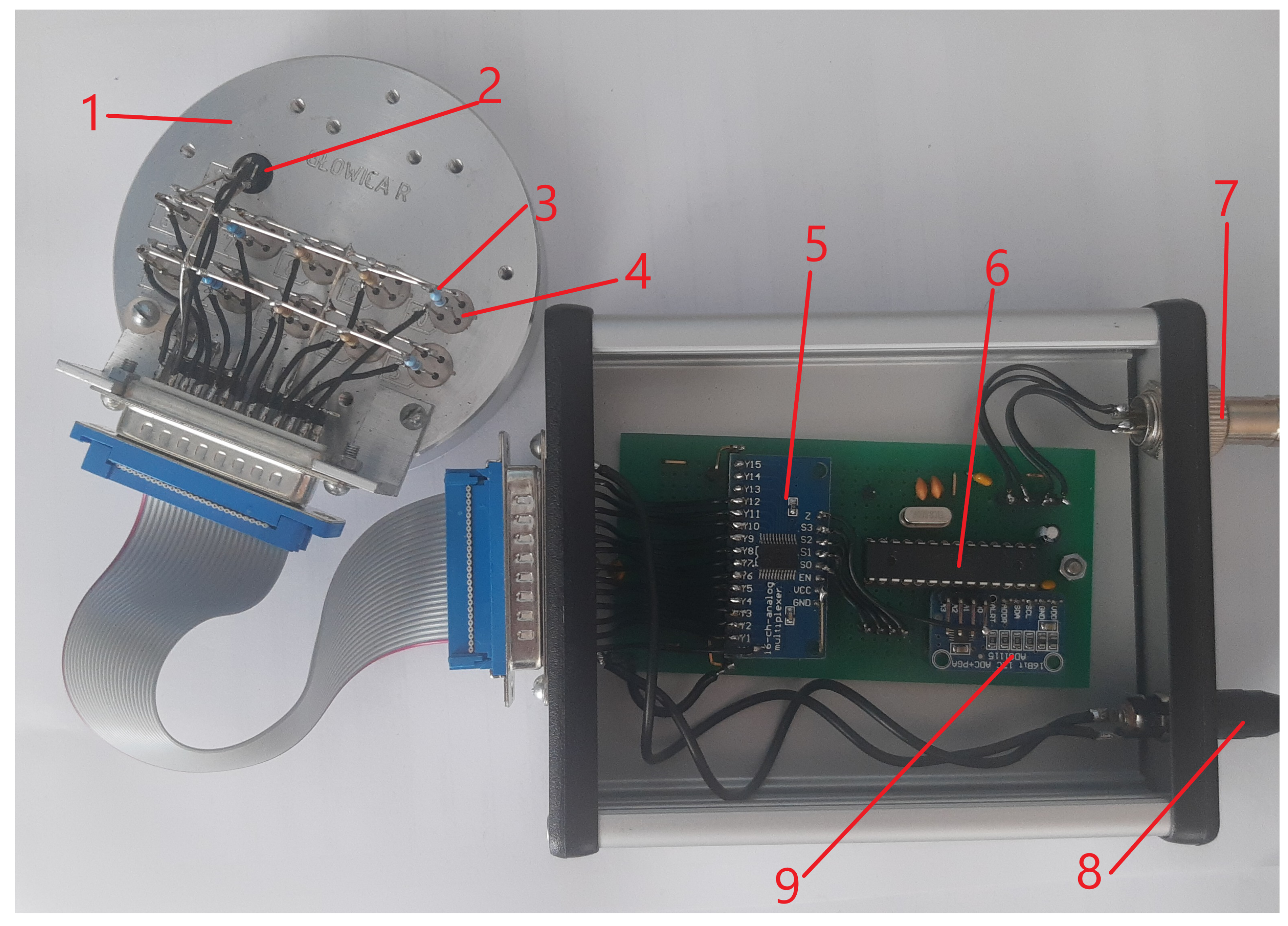
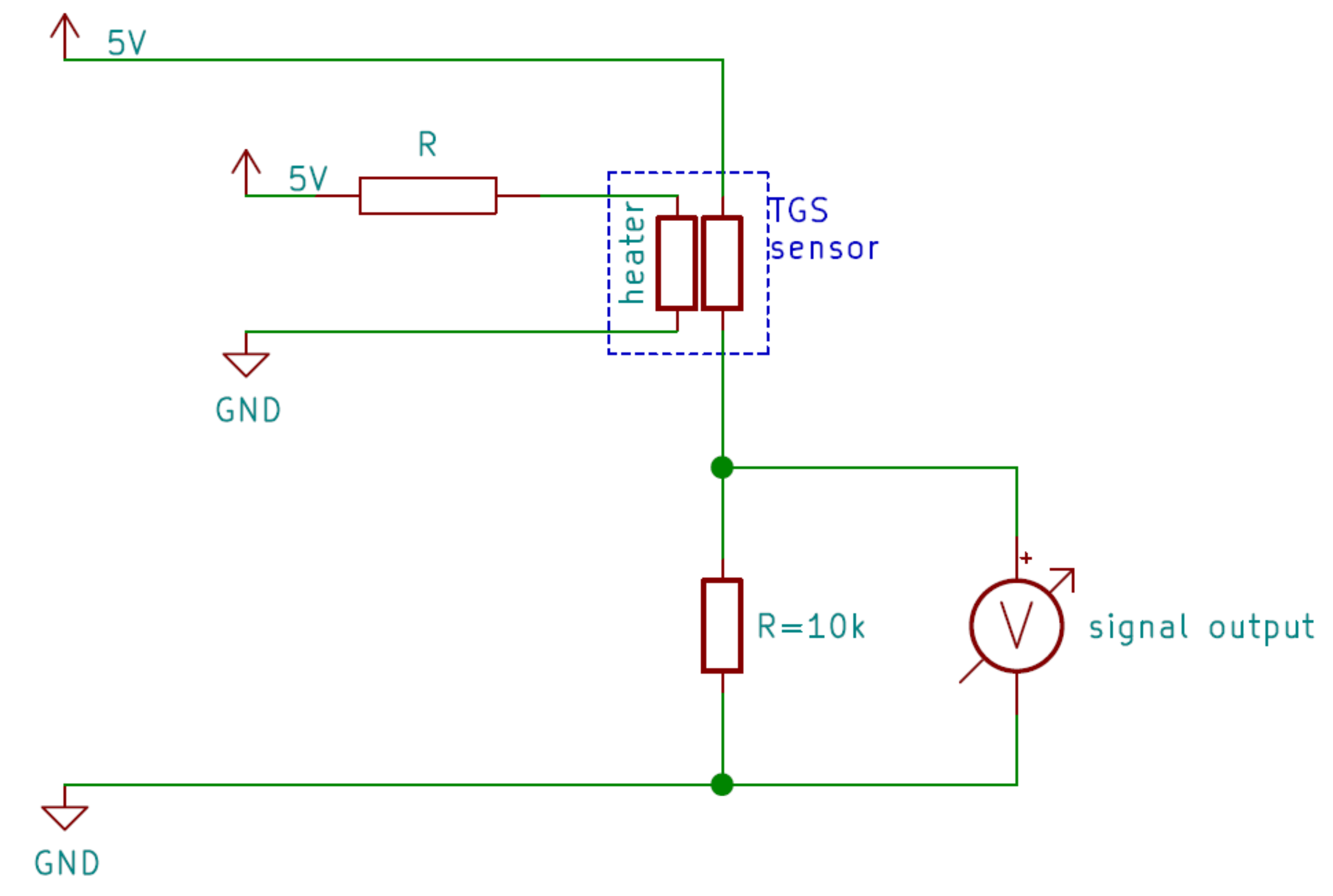
2.2. Electronic Nose Construction
3. Measured Samples
3.1. Sample Preparation
3.2. Measurements of Samples
4. Data Analysis Techniques
4.1. Data Preprocessing
4.2. Principal Component Analysis
4.3. Classification Modelling
5. Results and Discussion
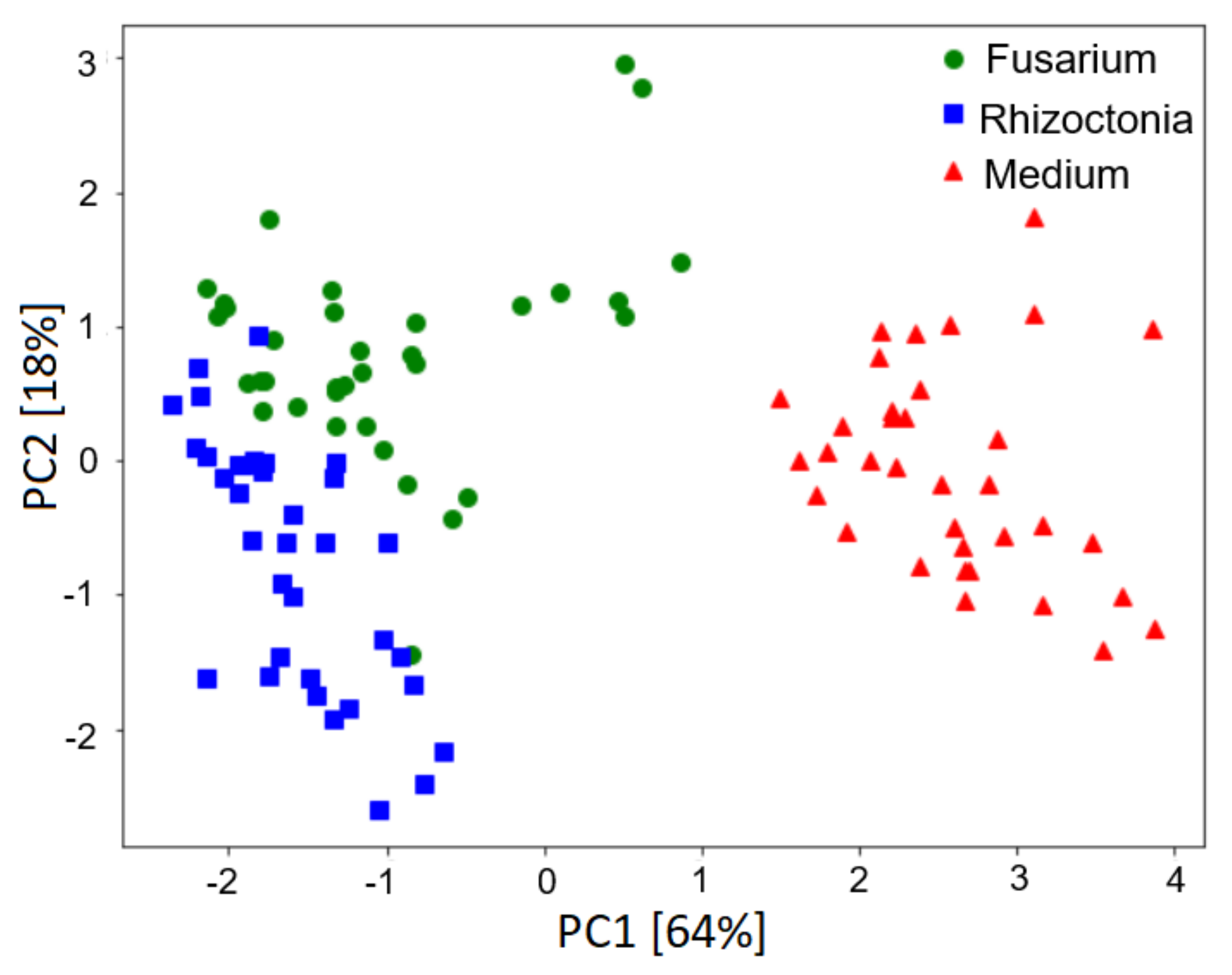
5.1. Principal Component Analysis
5.2. Performances of the Classification Models
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Loulier, J.; Lefort, F.; Stocki, M.; Asztemborska, M.; Szmigielski, R.; Siwek, K.; Grzywacz, T.; Hsiang, T.; Ślusarski, S.; Oszako, T.; et al. Detection of Fungi and Oomycetes by Volatiles Using E-Nose and SPME-GC/MS Platforms. Molecules 2020, 25, 5749. [Google Scholar] [CrossRef]
- Persaud, K.; Dodd, G. Analysis of discrimination mechanisms in the mammalian olfactory system using a model nose. Nature 1982, 299, 352–355. [Google Scholar] [CrossRef] [PubMed]
- Gardner, J.W.; Bartlett, P.N. A brief history of electronic noses. Sensors Actuators Chem. 1994, 18, 210–211. [Google Scholar] [CrossRef]
- Nagle, H.T.; Gutierrez-Osuna, R.; Schiffman, S.S. The how and why of electronic noses. IEEE Spectr. 1998, 35, 22–31. [Google Scholar] [CrossRef]
- Liu, T.; Li, D.; Chen, J. An active method of online drift-calibration-sample formation for an electronic nose. Measurement 2021, 171, 108748. [Google Scholar] [CrossRef]
- Kuchmenko, T.A.; Lvova, L.B. A Perspective on Recent Advances in Piezoelectric Chemical Sensors for Environmental Monitoring and Foodstuffs Analysis. Chemosensors 2019, 7, 39. [Google Scholar] [CrossRef] [Green Version]
- Hunter, G.W.; Akbar, S.; Bhansali, S.; Daniele, M.; Erb, P.D.; Johnson, K.; Liu, C.C.; Miller, D.; Oralkan, O.; Hesketh, P.J.; et al. Editors’ choice-critical review of solid state gas sensors. J. Electrochem. Soc. 2020, 167, 037570. [Google Scholar] [CrossRef]
- Tang, K.T.; Chiu, S.W.; Pan, C.; Hsieh, H.Y.; Liang, Y.S.; Liu, S.C. Development of a Portable Electronic Nose System for the Detection and Classification of Fruity Odors. Sensors 2010, 10, 9179–9193. [Google Scholar] [CrossRef] [Green Version]
- Macías, M.; Agudo, J.; Manso, A.; Orellana, C.; Velasco, H.; Caballero, R. A Compact and Low Cost Electronic Nose for Aroma Detection. Sensors 2013, 13, 5528–5541. [Google Scholar] [CrossRef] [Green Version]
- Trirongjitmoah, S.; Juengmunkong, Z.; Srikulnath, K.; Somboon, P. Classification of garlic cultivars using an electronic nose. Comput. Electron. Agric. 2015, 113, 148–153. [Google Scholar] [CrossRef]
- Chansongkram, W.; Nimsuk, N. Development of a Wireless Electronic Nose Capable of Measuring Odors Both in Open and Closed Systems. Procedia Comput. Sci. 2016, 86, 192–195. [Google Scholar] [CrossRef] [Green Version]
- Majchrzak, T.; Wojnowski, W.; Dymerski, T.; Gębicki, J.; Namieśnik, J. Electronic noses in classification and quality control of edible oils: A review. Food Chem. 2018, 246, 192–201. [Google Scholar] [CrossRef]
- Rodriguez Gamboa, J.C.; Albarracin E., E.S.; da Silva, A.J.; de Andrade Lima, L.L.; Ferreira, T.A.E. Wine quality rapid detection using a compact electronic nose system: Application focused on spoilage thresholds by acetic acid. LWT Food Sci. Technol. 2019, 108, 377–384. [Google Scholar] [CrossRef] [Green Version]
- Fuentes, S.; Summerson, V.; Gonzalez Viejo, C.; Tongson, E.; Lipovetzky, N.; Wilkinson, K.L.; Szeto, C.; Unnithan, R.r. Assessment of Smoke Contamination in Grapevine Berries and Taint in Wines Due to Bushfires Using a Low-Cost E-Nose and an Artificial Intelligence Approach. Sensors 2020, 20, 5108. [Google Scholar] [CrossRef]
- Szczurek, A.; Maciejewska, M.; Zajiczek, Ż.; Bąk, B.; Wilk, J.; Wilde, J.; Siuda, M. The Effectiveness of Varroa destructor Infestation Classification Using an E-Nose Depending on the Time of Day. Sensors 2020, 20, 2532. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, H.; Sun, W.; Lu, N.; Yan, M.; Wu, Y.; Hua, Z.; Fan, S. Development of a Low-Cost Portable Electronic Nose for Cigarette Brands Identification. Sensors 2020, 20, 4239. [Google Scholar] [CrossRef] [PubMed]
- Anyfantis, A.; Blionas, S. Proof of concept apparatus for the design of a simple, low cost, mobile e-nose for real-time victim localization (human presence) based on indoor air quality monitoring sensors. Sens. Bio-Sens. Res. 2020, 27, 100312. [Google Scholar] [CrossRef]
- Gonzalez Viejo, C.; Fuentes, S.; Godbole, A.; Widdicombe, B.; Unnithan, R.R. Development of a low-cost e-nose to assess aroma profiles: An artificial intelligence application to assess beer quality. Sensors Actuators Chem. 2020, 308, 127688. [Google Scholar] [CrossRef]
- Lampson, B.D.; Khalilian, A.; Greene, J.K.; Han, Y.J.; Degenhardt, D.C. Development of a Portable Electronic Nose for Detection of Cotton Damaged by Nezara viridula (Hemiptera: Pentatomidae). J. Insects 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Phaisangittisagul, E.; Nagle, H.T. Sensor Selection for Machine Olfaction Based on Transient Feature Extraction. IEEE Trans. Instrum. Meas. 2008, 57, 369–378. [Google Scholar] [CrossRef]
- Phaisangittisagul, E.; Nagle, H.T.; Areekul, V. Intelligent method for sensor subset selection for machine olfaction. Sensors Actuators Chem. 2010, 145, 507–515. [Google Scholar] [CrossRef]
- Guo, D.; Zhang, D.; Zhang, L. An LDA based sensor selection approach used in breath analysis system. Sensors Actuators Chem. 2011, 157, 265–274. [Google Scholar] [CrossRef]
- Zhang, L.; Tian, F.; Pei, G. A novel sensor selection using pattern recognition in electronic nose. Measurement 2014, 54, 31–39. [Google Scholar] [CrossRef]
- Miao, J.; Zhang, T.; Wang, Y.; Li, G. Optimal Sensor Selection for Classifying a Set of Ginsengs Using Metal-Oxide Sensors. Sensors 2015, 15, 16027–16039. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Tian, F.; Liang, Z.; Sun, T.; Yu, B.; Yang, S.X.; He, Q.; Zhang, L.; Liu, X. Sensor Array Optimization of Electronic Nose for Detection of Bacteria in Wound Infection. IEEE Trans. Ind. Electron. 2017, 64, 7350–7358. [Google Scholar] [CrossRef]
- Llobet, E.; Ionescu, R.; Al-Khalifa, S.; Brezmes, J.; Vilanova, X.; Correig, X.; Barsan, N.; Gardner, J.W. Multicomponent gas mixture analysis using a single tin oxide sensor and dynamic pattern recognition. IEEE Sensors J. 2001, 1, 207–213. [Google Scholar] [CrossRef]
- Szczurek, A.; Krawczyk, B.; Maciejewska, M. VOCs classification based on the committee of classifiers coupled with single sensor signals. Chemom. Intell. Lab. Syst. 2013, 125, 1–10. [Google Scholar] [CrossRef]
- Szczurek, A.; Maciejewska, M. “Artificial sniffing” based on induced temporary disturbance of gas sensor response. Sensors Actuators Chem. 2013, 186, 109–116. [Google Scholar] [CrossRef]
- Hossein-Babaei, F.; Amini, A. Recognition of complex odors with a single generic tin oxide gas sensor. Sensors Actuators Chem. 2014, 194, 156–163. [Google Scholar] [CrossRef]
- Herrero-Carrón, F.; Yáñez, D.J.; de Borja Rodríguez, F.; Varona, P. An active, inverse temperature modulation strategy for single sensor odorant classification. Sensors Actuators Chem. 2015, 206, 555–563. [Google Scholar] [CrossRef]
- Ponzoni, A.; Depari, A.; Comini, E.; Faglia, G.; Flammini, A.; Sberveglieri, G. Exploitation of a low-cost electronic system, designed for low-conductance and wide-range measurements, to control metal oxide gas sensors with temperature profile protocols. Sensors Actuators Chem. 2012, 175, 149–156. [Google Scholar] [CrossRef]
- Ding, H.; Ge, H.; Liu, J. High performance of gas identification by wavelet transform-based fast feature extraction from temperature modulated semiconductor gas sensors. Sensors Actuators Chem. 2005, 107, 749–755. [Google Scholar] [CrossRef]
- Oates, M.J.; Fox, P.; Sanchez-Rodriguez, L.; Carbonell-Barrachina, Á.A.; Ruiz-Canales, A. DFT based classification of olive oil type using a sinusoidally heated, low cost electronic nose. Comput. Electron. Agric. 2018, 155, 348–358. [Google Scholar] [CrossRef]
- Durán, C.; Benjumea, J.; Carrillo, J. Response Optimization of a Chemical Gas Sensor Array using Temperature Modulation. Electronics 2018, 7, 54. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.; Zhang, L.; Tian, F.; Zhang, D. Temperature Modulated Gas Sensing E-Nose System for Low-Cost and Fast Detection. IEEE Sensors J. 2016, 16, 464–474. [Google Scholar] [CrossRef]
- Fonollosa, J.; Fernández, L.; Huerta, R.; Gutiérrez-Gálvez, A.; Marco, S. Temperature optimization of metal oxide sensor arrays using Mutual Information. Sensors Actuators Chem. 2013, 187, 331–339. [Google Scholar] [CrossRef]
- Sysoev, V.; Kiselev, I.; Frietsch, M.; Goschnick, J. Temperature Gradient Effect on Gas Discrimination Power of a Metal-Oxide Thin-Film Sensor Microarray. Sensors 2004, 4, 37–46. [Google Scholar] [CrossRef] [Green Version]
- Thai, N.X.; Tonezzer, M.; Masera, L.; Nguyen, H.; Duy, N.V.; Hoa, N.D. Multi gas sensors using one nanomaterial, temperature gradient, and machine learning algorithms for discrimination of gases and their concentration. Anal. Chim. Acta 2020, 1124, 85–93. [Google Scholar] [CrossRef]
- Wilson, A. Diverse Applications of Electronic-Nose Technologies in Agriculture and Forestry. Sensors 2013, 13, 2295–2348. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ray, M.; Ray, A.; Dash, S.; Mishra, A.; Achary, K.G.; Nayak, S.; Singh, S. Fungal disease detection in plants: Traditional assays, novel diagnostic techniques and biosensors. Biosens. Bioelectron. 2017, 87, 708–723. [Google Scholar] [CrossRef]
- Cellini, A.; Blasioli, S.; Biondi, E.; Bertaccini, A.; Braschi, I.; Spinelli, F. Potential Applications and Limitations of Electronic Nose Devices for Plant Disease Diagnosis. Sensors 2017, 17, 2596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, S.; Ling, P.; Zhu, H.; Keener, H. Plant Pest Detection Using an Artificial Nose System: A Review. Sensors 2018, 18, 378. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Meng, Q.H.; Lilienthal, A.J.; Qi, P.F. Development of compact electronic noses: A review. Meas. Sci. Technol. 2021, 32, 062002. [Google Scholar] [CrossRef]
- Sherveglieri, V.; Bhandari, M.; Carmona, E.N.; Betto, G.; Soprani, M.; Malla, R.; Sberveglieri, G. Spectrocolorimetry and nanowire gas sensor device S3 for the analysis of Parmigiano Reggiano cheese ripening. In Proceedings of the ISOCS/IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Montreal, QC, Canada, 28–31 May 2017; pp. 1–3. [Google Scholar]
- Sberveglieri, V.; Bhandari, M.P.; Núñez Carmona, E.; Betto, G.; Sberveglieri, G. A novel MOS nanowire gas sensor device (S3) and GC-MS-based approach for the characterization of grated Parmigiano Reggiano cheese. Biosensors 2016, 6, 60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mota, I.; Teixeira-Santos, R.; Rufo, J.C. Detection and identification of fungal species by electronic nose technology: A systematic review. Fungal Biol. Rev. 2021. [Google Scholar] [CrossRef]
- de Lamo, F.J.; Takken, F.L.W. Biocontrol by Fusarium oxysporum Using Endophyte-Mediated Resistance. Front. Plant Sci. 2020, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bao, J.; Fravel, D.; Lazarovits, G.; Chellemi, D.; van Berkum, P.; O’Neill, N. Biocontrol genotypes of Fusarium oxysporum from tomato fields in Florida. Phytoparasitica 2004, 32, 9–20. [Google Scholar]
- Armstrong, G.M.; Armstrong, J.K. Formae Speciales and Races of Fusarium oxysporum Causing Wilt Disease. In Fusarium: Diseases, Biology, and Taxonomy; Nelson, P.E., Toussoun, T.A., Cook, R.J., Eds.; Pennsylvania State University: University Park, PA, USA, 1981; pp. 391–399. [Google Scholar]
- Edel-Hermann, V.; Lecomte, C. Current Status of Fusarium oxysporum Formae Speciales and Races. Phytopathology 2019, 109, 512–530. [Google Scholar] [CrossRef] [Green Version]
- Canhoto, O.; Pinzari, F.; Fanelli, C.; Magan, N. Application of electronic nose technology for the detection of fungal contamination in library paper. Int. Biodeterior. Biodegrad. 2004, 54, 303–309. [Google Scholar] [CrossRef]
- Falasconi, M.; Gobbi, E.; Pardo, M.; Torre, M.D.; Bresciani, A.; Sberveglieri, G. Detection of toxigenic strains of Fusarium verticillioides in corn by electronic olfactory system. Sensors Actuators Chem. 2005, 108, 250–257. [Google Scholar] [CrossRef]
- Borowik, P.; Adamowicz, L.; Tarakowski, R.; Wacławik, P.; Oszako, T.; Ślusarski, S.; Tkaczyk, M. Application of a Low-Cost Electronic Nose for Differentiation between Pathogenic Oomycetes Pythium intermedium and Phytophthora plurivora. Sensors 2021, 21, 1326. [Google Scholar] [CrossRef]
- Borowik, P.; Adamowicz, L.; Tarakowski, R.; Wacławik, P.; Oszako, T.; Ślusarski, S.; Tkaczyk, M.; Stocki, M. Electronic Nose Differentiation Between Quercus robur Acorns Infected by Pathogenic Oomycetes Phytophthora plurivora and Pythium intermedium. Molecules 2021, 26, 5272. [Google Scholar] [CrossRef]
- Figaro Engineering Inc. TGS 2602 Product Information. Available online: https://www.figarosensor.com/product/docs/TGS2602-B00 (accessed on 10 July 2021).
- Figaro Engineering Inc. TGS 2603 Product Information. Available online: https://www.figaro.co.jp/en/product/docs/tgs2603_product_information_rev02.pdf (accessed on 10 July 2021).
- Figaro Engineering Inc. TGS 2600 Product Information. Available online: https://www.figarosensor.com/product/docs/TGS2600B00%20%280913%29.pdf (accessed on 10 July 2021).
- Figaro Engineering Inc. TGS 2610 Product Information. Available online: https://www.figaro.co.jp/en/product/docs/tgs2610_product_information_rev03.pdf (accessed on 10 July 2021).
- Figaro Engineering Inc. TGS 2611 Product Information. Available online: https://www.figarosensor.com/product/docs/TGS%202611C00(1013).pdf (accessed on 10 July 2021).
- Figaro Engineering Inc. TGS 2620 Product Information. Available online: https://www.figarosensor.com/product/docs/TGS%202620C%280814%29%20pdf.pdf (accessed on 10 July 2021).
- Lamichhane, J.R.; Dürr, C.; Schwanck, A.A.; Robin, M.H.; Sarthou, J.P.; Cellier, V.; Messéan, A.; Aubertot, J.N. Integrated management of damping-off diseases. A review. Agron. Sustain. Dev. 2017, 37, 10. [Google Scholar] [CrossRef]
- Jarvis, W.R. Taxonomic Status of Fusarium oxysporum Causing Foot and Root Rot of Tomato. Phytopathology 1978, 68, 1679. [Google Scholar] [CrossRef]
- Vakalounakis, D.J. Root and stem rot of cucumber caused by Fusarium oxysporum f. sp. radicis-cucumerinum f. sp. nov. Plant Dis. 1996, 80, 313. [Google Scholar] [CrossRef]
- Linderman, R.G. Fusarium diseases of flowering bulb crops. In Fusarium: Diseases, Biology, and Taxonomy; Nelson, P.E., Toussoun, T.A., Cook, R.J., Eds.; Pennsylvania State University: University Park, PA, USA, 1981; pp. 129–141. [Google Scholar]
- Houterman, P.W.; Speijer, D.; Dekker, H.L.; de Koseter, C.G.; Cornelissen, B.J.C.; Rep, M. The mixed xylem sap proteome of Fusarium oxysporum-infected tomato plants. Mol. Plant Pathol. 2007, 8, 215–221. [Google Scholar] [CrossRef]
- Ma, L.J.; van der Does, H.C.; Borkovich, K.A.; Coleman, J.J.; Daboussi, M.J.; Di Pietro, A.; Dufresne, M.; Freitag, M.; Grabherr, M.; Henrissat, B.; et al. Comparative genomics reveals mobile pathogenicity chromosomes in Fusarium. Nature 2010, 464, 367–373. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, S.M.; Houterman, P.M.; Schreiver, I.; Ma, L.; Amyotte, S.; Chellappan, B.; Boeren, S.; Takken, F.L.W.; Rep, M. MITEs in the promoters of effector genes allow prediction of novel virulence genes in Fusarium oxysporum. BMC Genom. 2013, 14, 119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, S.; Demers, J.; Jimenez-Gasco, M.M.; Rep, M. Fusarium oxysporum. In Genomics of Plant-Associated Fungi and Oomycetes: Dicot Pathogens; Springer: Berlin/Heidelberg, Germany, 2014; pp. 99–119. [Google Scholar] [CrossRef]
- Yan, J.; Guo, X.; Duan, S.; Jia, P.; Wang, L.; Peng, C.; Zhang, S. Electronic Nose Feature Extraction Methods: A Review. Sensors 2015, 15, 27804–27831. [Google Scholar] [CrossRef] [PubMed]
- Borowik, P.; Adamowicz, L.; Tarakowski, R.; Siwek, K.; Grzywacz, T. Odor Detection Using an E-Nose with a Reduced Sensor Array. Sensors 2020, 20, 3542. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Model | Target Detection |
|---|---|
| In both constructions (PW4 and PW6) | |
| TGS 2602 | Has high sensitivity to low concentrations of odorous gases such as ammonia and HS generated from waste materials in office and home environments. The sensor also has a high sensitivity to low concentrations of VOCs such as toluene emitted from wood finishing and construction products. [55] |
| TGS 2603 | Has high sensitivity to low concentrations of odorous gases such as amine-series and sulphurous odours generated from waste materials or spoiled foods such as fish. [56] |
| Only in the first construction (PW4) | |
| TGS 2600 | Has a high sensitivity to low concentrations of gaseous air contaminants such as hydrogen and carbon monoxide, which exist in cigarette smoke. The sensor can detect hydrogen at a level of several ppm. [57] |
| TGS 2610 | Uses filter material in its housing, eliminating the influence of interference gases such as alcohol, resulting in a highly selective response to LP gas. [58] |
| TGS 2611 | Uses filter material in its housing which eliminates the influence of interference gases such as alcohol, resulting in a highly selective response to methane gas. [59] |
| TGS 2620 | Has high sensitivity to organic solvents and other volatile vapours’ vapours, making it suitable for organic vapour detectors/alarms. [60] |
| Resistor | TGS 2602 | TGS 2603 |
|---|---|---|
| 0 | 5.0 V | 5.0 V |
| 10 | 4.5 V | 4.6 V |
| 50 | 3.0 V | 3.2 V |
| 75 | 2.4 V | 2.6 V |
| 100 | 2.0 V | 2.3 V |
| Component | Power Consumption |
|---|---|
| TGS 2600 | 210 mW |
| TGS 2602 | 280 mW |
| TGS 2603 | 240 mW |
| TGS 2610 | 280 mW |
| TGS 2611 | 280 mW |
| TGS 2600 | 210 mW |
| Other | 250 mW |
| Total PW4 | 1750 mW |
| Total PW6 | 2850 mW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borowik, P.; Adamowicz, L.; Tarakowski, R.; Wacławik, P.; Oszako, T.; Ślusarski, S.; Tkaczyk, M. Development of a Low-Cost Electronic Nose for Detection of Pathogenic Fungi and Applying It to Fusarium oxysporum and Rhizoctonia solani. Sensors 2021, 21, 5868. https://doi.org/10.3390/s21175868
Borowik P, Adamowicz L, Tarakowski R, Wacławik P, Oszako T, Ślusarski S, Tkaczyk M. Development of a Low-Cost Electronic Nose for Detection of Pathogenic Fungi and Applying It to Fusarium oxysporum and Rhizoctonia solani. Sensors. 2021; 21(17):5868. https://doi.org/10.3390/s21175868
Chicago/Turabian StyleBorowik, Piotr, Leszek Adamowicz, Rafał Tarakowski, Przemysław Wacławik, Tomasz Oszako, Sławomir Ślusarski, and Miłosz Tkaczyk. 2021. "Development of a Low-Cost Electronic Nose for Detection of Pathogenic Fungi and Applying It to Fusarium oxysporum and Rhizoctonia solani" Sensors 21, no. 17: 5868. https://doi.org/10.3390/s21175868