1. Introduction
With the continuous development of computer science, researchers have become increasingly interested in the use of digital virtual technologies in the construction industry. Due to the growing demand for information exchange on the construction site, cyber–physical system (CPS) architecture has become a highly promising approach. Cyber–physical systems (CPSs) refer to the integration of physical processes and computation [
1,
2,
3]. CPSs can be considered as a confluence of distributed sensor systems and controls [
4]. It is a transformative technology for managing interconnected systems between its physical assets and computational capabilities [
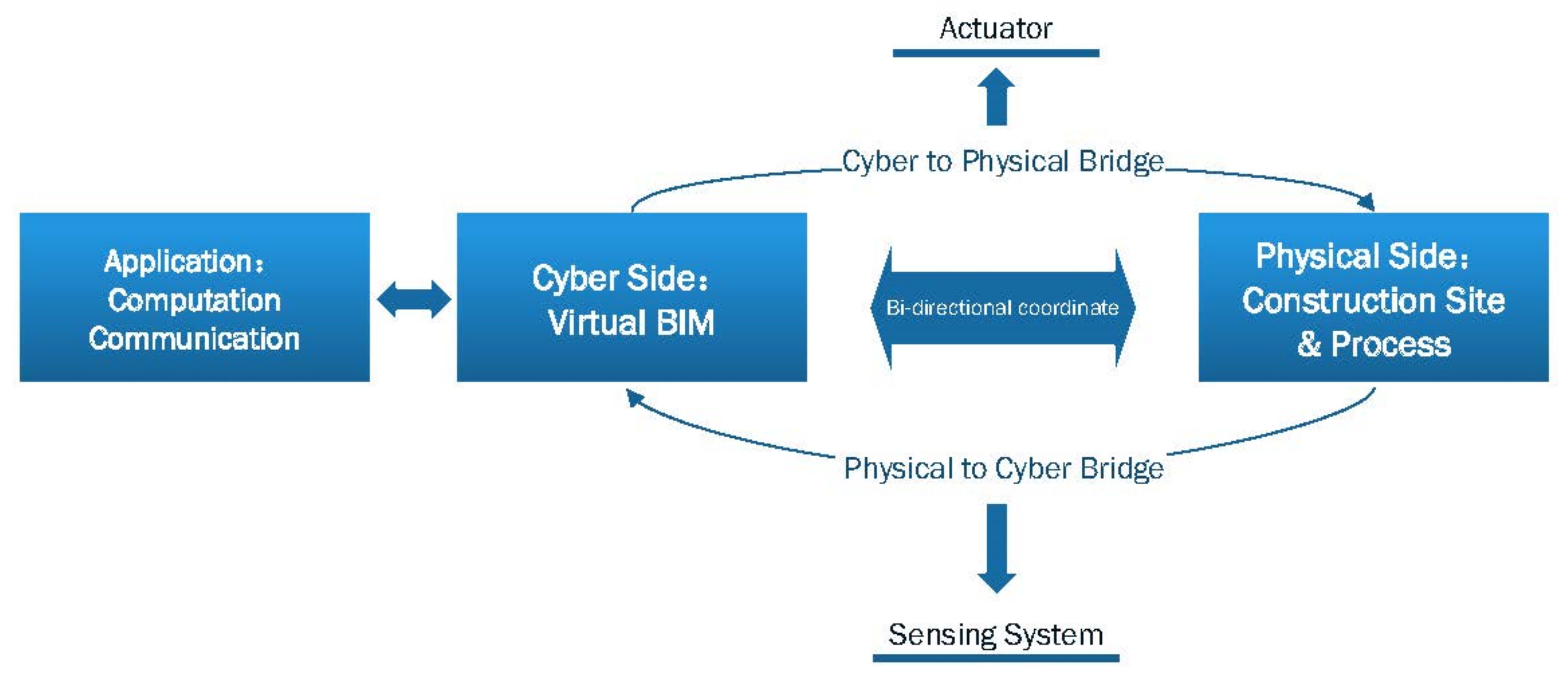
5]. In order to achieve bi-directional coordination, computational resources are needed to tightly integrate the virtual and physical domains [
5]. Using a CPS can bring great social and economic benefits. Many developed industrial countries, represented by the United States and European Union, have already turned their attention to the research of CPSs and provided enormous investment [
6].
However, the application of the current CPS architecture on the construction site still faces many limitations. Although the widespread application of building information modeling (BIM) technology in construction projects has greatly facilitated the establishment of the cyber side of CPSs, how to achieve data exchange and coordination from the physical side to the cyber side based on multiple sensors is still a major problem due to the decentralized and complex nature of construction sites. Cost is also a problem in the application of CPS in construction sites. Contractors still have doubts about the benefits of their investment at the CPS level. On the other hand, at the researcher, professional, and institutional levels, barriers have resulted in narrowly defined, discipline-specific research and education venues in academia for the science and engineering disciplines. Research of CPSs is partitioned into isolated sub-disciplines [
7]. Therefore, a novel approach of CPS needs to be proposed. This approach should be applied in changing and complex scenarios and sense the construction process information. Based on these points, computer vision is taken into consideration as a complement to CPS’s ability to sense the physical world.
Computer vision (CV) allows computers to obtain high-level, abstract, and computable information from images or video. Currently, deep learning-based CV methods are widely accepted. Since the demonstration of convolutional neural networks (CNN) for image classification tasks in 1998 [
8], this approach has been continuously developed. In 2006, the concept of deep learning was significantly developed [
9]. Then, at the 2012 ImageNet competition, deep convolutional networks have almost halved the error rates of the best competing approaches [
10,
11]. At the same time, the improvement in computing performance has further stimulated the development of computer vision methods based on CNN. A variety of deep learning and CNN-based algorithms have been developed for major tasks in computer vision including image classification, object detection, object tracking, instance segmentation, semantic segmentation, etc. From an engineering perspective, computer vision can automate tasks that require human vision. Studies have been conducted on vision-based video or photographic analysis and image processing techniques for progress monitoring and scheduling, tracking equipment operation, and distinguish construction equipment [
12].
The innovation and development of CPS will require computer scientists and network professionals to work with experts in various engineering disciplines including control engineering, signal processing, civil engineering, etc. [
4]. These advances at the technical level have made CV-based CPS possible and provide a new approach to cyber–physical bi-directional information exchange. Compared to traditional CPS sensing methods (e.g., sensor networks [
13], IoT [
14], RFID-RTLS), CV-based technology for sensing offers completely new possibilities for CPS. This approach has advantages, on one hand, at the cost level, and on the other hand, there are better solutions for the decentralized nature of construction sites. In addition, the computer vision method aims to automate the work that can be done by human vision. For the traditional manual construction site management method, the CV method can provide a foundation for the automation and intelligence in construction sites.
In this paper, a review of the state-of-the-art applications of CPS in the construction industry is presented, along with an analysis of the currently existing knowledge gaps that affect the further application of CPS on the construction site. Afterward, based on the review of computer vision technology application in construction, a method to establish a bridge for the transmission of information from the physical side to the cyber side of CPS using the computer vision method is proposed. For the application of CPS in the construction industry, this paper focuses more on the combination of the construction process and CPS to enable better intelligent management of this important phase of construction. This CPS framework focuses on the construction process, and innovatively introduces computer vision as a sensing method of the construction site, and realizes low-cost and non-invasive information acquisition in complex construction scenarios. The feasibility of this method was further analyzed. Finally, the implementation method of a computer vision-based CPS system is discussed and conclusions are drawn. This method can be used as an important supplement to on-site sensing to further promote the automation and intelligence of the construction process.
2. Methods
This article conducts an overview study of CPS applications at current construction sites. Since the sensing of the physical environment is an important part of CPS, and one of the main obstacles to the current application of CPS on construction sites is that site sensing is affected by complex environments, this paper is dedicated to a CV-based approach to site sensing. For these reasons, the scope of the literature in this paper covers two main areas: the CPS and the application of CV in construction site sensing.
This paper collects and analyzes the literature from academic publications on the application of CPS in the construction industry and the application of CV methods to perceive construction behavior on the construction site. The methodology used in this paper refers to the collection and analysis of the literature in [
15,
16]. The methodology of this paper consists of the following four steps: (1) Select the keywords for literature searching based on the research scope; (2) literature collection and organization; (3) analyze the contents of the literature and summarize the state of application of CPS and CV in construction sites under current technical conditions, and identify the knowledge gaps between current methods to an applicable CPS for construction sites; and (4) according to the existing problems and needs of the current construction site, combined with the knowledge gap in the research field, suggestions and solutions are put forward to better improve the intelligent level of the construction site of the construction industry in the era of Industry 4.0.
Of these, steps 1 and 2 will be discussed in this section, and the collected literature will be initially organized and analyzed. Step 3 will be analyzed and summarized in detail in
Section 3 and
Section 4. Step 4 will be further developed in
Section 5.
The procedure of this research can be seen in
Figure 1. Based on this process, the topic of this paper was identified. At the same time, the cyclic of keywords—literature collection—organization—new keywords is used for the problems and possible solutions of CPS in construction site applications.
The literature collected included two main parts: cyber–physical system(s) and computer vision. Both were narrowed down in research areas to “CONSTRUCTION BUILDING TECHNOLOGY.” After keyword searching, the literature was further filtered based on the title and abstract to obtain content relevant to this topic. Finally, a total of 110 references were cited in this paper. Of these, 19 were published after 2020, 46 in 2018–2019, and 24 in 2015–2017. The main sources of the literature include Automation in Construction (41), Computer-Aided Civil and Infrastructure Engineering (5), Engineering, Construction and Architectural Management (6), Journal of Computing in Civil Engineering (3), Sensors (3), and Advanced Engineering Informatics (3). All the literature searched is from Web of Science (WOS).
4. Computer Vision in Construction
4.1. Computer Vision
Computer vision is a technology that allows computers to learn to “watch” and to have human-like “vision” capability. Computer vision methods allow computers to extract higher-level, abstracted information from huge amounts of image or video data. Currently, there are many different tasks in the field of computer vision such as object detection, instance segmentation, semantic segmentation, object tracking, etc. depending on the input image information and the required output information. After the concept of deep learning was introduced, computer vision methods based on deep learning, especially convolutional neural networks, have been rapidly developed. Deep learning and convolutional neural networks have brought a great revolution in the field of computer vision, and it is this revolution that provides a far better foundation for the application of computer vision in construction sites. Convolutional neural network-based methods now play an important role in many fields including object detection, instance segmentation, and tracking.
After reviewing the computer vision methods, it was found that object detection and the instance segmentation method can benefit computer vision-based construction site sensing. In addition, tracking methods for various types of objects are equally important.
Object detection is a method to precisely estimate the concepts and locations of objects contained in each image to gain a complete image understanding. It is able to provide valuable information for the semantic understanding of images and videos [
49]. Currently, there are mainly two different approaches to object detection/instance segmentation methods as
Figure 3 shows. One is a series of methods that are evolved based on the regional proposal method proposed by R-CNN [
50]. This type of method is also known as the two-stage method because its detection process first generates a group of regional proposals, and then classifies each regional proposal afterward. The method that completes location detection and classification in the same process is called the one-stage method.
These two types of methods each have different advantages and disadvantages. In general, the two-stage approach performs better at the level of mAP and object location accuracy; however, it consumes more computing capability and time. Although tricks can be used to make it better in real-time, overall, the one-stage method can perform the detection task more quickly with better real-time performance [
49].
The development of the two-stage method has a clear line of succession. From R-CNN to Mask-R-CNN, the development is established based on the previous generation of technology. The two-stage method includes R-CNN [
50], SPP-net [
51], Fast-R-CNN [
52], Faster-R-CNN [
53], Mask-R-CNN [
54]. The one-stage method includes SSD [
55] and Yolo (from v1 to the latest Yolo v4) [
56,
57,
58,
59].
Instance segmentation can be considered as a further extension of object detection. In object detection, a specific object in an image is localized by a rectangular bounding box. However, in this localization method, it is difficult to specify the exact location of the object in complex states. In practical applications, object boundaries are also important information. The algorithm represented by Mask-R-CNN [
54] achieves instance segmentation by mask generation based on the above-mentioned object detection. Mask-R-CNN adds a branch for mask prediction by building on the structure of the original Faster-R-CNN. Since then, the author of Mask-R-CNN has continued to improve the algorithms at the instance segmentation level and built RetinaNet [
60], TensorMask [
61], PointRend [
62], and other algorithms to further improve the performance of instance segmentation in various datasets.
4.2. Computer Vision-Based Construction Site Sensing
Currently, with the increasing demand for digitalization and intelligence in the construction industry, the research on the application of deep learning-based computer vision methods in construction projects has been developing rapidly. The construction site is complex and the current application of computer vision in construction sites generally selects a specific entity or several interrelated entities at the construction site for the corresponding site sensing and information acquisition. Researches carried out on the construction site vehicles, construction machinery, and workforce detection show that the use of computer vision methods can effectively obtain construction site human–machine information, and this information will play a key role in intelligent management for construction.
Depending on the selected construction site entity, the sensing of the construction site can be divided into the following components: workforce, equipment, materials, construction methods and technology, environment, and quality. The CV algorithm can also be further categorized based on the categories of information acquired when applied to these different entities, as shown in
Figure 4. The current study focuses on workforce and equipment as well as on-site construction activity because the state of human–machine at the construction site is the key to construction management. CV methods are less commonly used in materials, environment, and quality areas. The following section will categorize and organize the literature in these areas and present the current status of their research.
4.2.1. Workforce
The workforce is the most important factor on the construction site. Currently, the level of automation in the construction industry is relatively low, and the need for labor is still high. This also means that the management of the workforce is one of the most important out of all aspects of site management. The productivity of workers on site is always a concern for managers. In addition, personnel safety is another noteworthy issue. As shown in
Table 2, computer vision can enable the acquisition of information about the whole process of construction at multiple levels for the on-site workforce.
Figure 5 is a typical worker tracking method. The tracking algorithm can give a fixed number to the workers in the construction scene, and keep tracking the workers during the construction process. Reidentification (ReID) is a noteworthy novel algorithm for worker tracking. This algorithm combined with multiple cameras can effectively acquire the 3D coordinates of workers while continuously maintaining tracking [
63]. Currently, the main barriers to worker detection on construction sites exist in the complex environment and cluttered background of construction sites. In addition, the similarity of workers in appearance (due to workwear/PPE wearing) also makes it more difficult to identify/trace workers on site [
64].
4.2.2. Equipment
There is a wide variety of equipment at construction sites, and its tracking and monitoring play an important role in site management. For heavy equipment on-site such as tower cranes, their operational status has a major impact on both site safety and productivity.
Figure 6 shows a method for obtaining the productivity information of mechanical equipment on the construction site based on computer vision and LSTM. This method can judge the relationship between associated equipment while obtaining the type and location. The method in
Figure 7 pays more attention to the acquisition of spatial relationships. This method uses the known information of the vehicle to infer its three-dimensional spatial relationship based on the two-dimensional image.
Table 3 shows the information acquisition of construction equipment from existing CV-based studies.
4.2.3. Material
Identifying and tracking construction materials is essential in the construction process. Management of the transportation, lifting, and installation of building materials requires access to a variety of information about their location, quantity, and condition. The use of computer vision on construction sites can provide the information needed for management in a non-intrusive way. In busy and complex construction sites, the non-intrusive, low-cost advantages of visual methods can be better demonstrated.
Table 4 provides existing methods to obtain quantity and status information for some of the building materials. However, current research in this area is still insufficient. Currently, with the implementation of a pre-cast structure, the percentage of pre-cast components in the on-site construction materials is increasing. The identification and tracking of pre-cast components can also perform well in computer vision [
90].
Figure 8 shows the tracking of a precast component hoisting process by the computer vision method.
4.2.4. Construction Activity/Method
Construction activity is the basic component unit of the construction process. For CPS, to achieve a digital representation of the production process, the identification of on-site construction activity is necessary. However, construction activity involves interactions between multiple entities and is more complex than the recognition of a single entity. Visual methods for complex construction activity still need further development.
Table 5 shows the current research for construction activity recognition.
4.2.5. 3D Reconstruction
The object detection method only acquires the position of the object in 2D image pixel coordinates, but both the implementation of construction management and the establishment of CPS need the actual 3D coordinates of the object as the basis. Therefore, the 3D reconstruction of the construction site is very necessary. There are a number of methods available to achieve this goal.
Table 6 shows the current 3D reconstruction methods.
4.2.6. Damage Identification
The detection of damage on structural components of existing buildings or buildings under construction based on computer vision methods has been proven to be an effective method. However, there is still no effective method for construction quality inspection during construction. This field is still underdeveloped.
Table 7 shows the current research for damage identification.
4.2.7. Safety Management in Construction Site
In general, although there have been studies on construction safety management based on computer vision, the focus of this research is still at the level of identifying image features (e.g., hard hat, etc.) of the construction site rather than a systematic approach to management. The combination of CPS can better accomplish this task.
Table 8 shows the current research for safety management.
4.3. Limitations
The review above shows that computer vision is currently being tested in the construction industry. As an emerging cross-discipline, this field is developing very rapidly. However, the application of computer vision on construction sites is still in its infancy. At present, researchers are still devoted to the exploration of computer vision in the construction field. Although these methods have accomplished their objectives using computer vision methods in construction site scenarios, they lack a systematic solution and do not form an effective closed-loop control, and some of the studies have only accomplished the initial goal of identifying and acquiring information, but not the subsequent reconstruction of construction scenarios or the simulation and analysis of the construction process. Similarly, there is a lack of research on how to further utilize the information extracted from the images by computer vision methods to systematically improve the intelligence of the construction process. Among the above literature, only [
112] conducted a construction safety analysis based on the relationship between worker, equipment, and materials at the construction site. The method proposed in this paper relies mainly on expert scoring, which is subjective and needs further validation for applicability between different scenarios.
This knowledge gap limits the application of computer vision in construction. There is a need for an architecture that can effectively apply the information obtained through CV to better facilitate relevant research.
5. Proposed Solution
5.1. CV-Based Construction Site Sensing and CPS
During the construction stage, CPS creates a looped connection between stakeholders that provides access to virtual models via mobile devices and facilitates decision-making [
3]. CPS is the product of integration of heterogeneous systems [
6]. To a large extent, the image information collected by the on-site camera system and the high-level, abstract geometric information and component information stored in the BIM model is heterogeneous data. Using computer vision methods to extract the required abstract information from the image data, transform the heterogeneous data into computable and storable homogeneous data, and apply it to the BIM model located on the cyber side is an approach that is completely consistent with the concept of CPS. Currently, there have been attempts to combine computer vision with BIM. Camera-based unmanned aerial systems (UAS) already use computer vision algorithms to collect and process inspection data, and a bridge information model (BrIM) to store and manage all relevant inspection information [
114]. This can be considered as a prototype of a construction process CPS, which includes the sensing processes and information core of the CPS.
Therefore, after completing the review of the current state of application of CPS and computer vision methods on construction sites, this paper concludes that implementing a relatively low-cost construction site perception system based on computer vision methods and applying it to the construction of CPS architectures is a very promising option. Zhenhua Zhu et al. [
69] found that the on-site videos contain rich information for site engineers and managers to analyze construction productivity, monitor construction progress, inspect job site safety, etc. There are several reasons for this choice: first, camera systems are inexpensive and are now widely used at construction sites. However, in most construction sites, this valuable video data are not fully utilized. Because of the labor-intensive nature of obtaining information from these videos and images on construction sites, these cameras are generally used only as an aid to human monitoring. Since the placement of camera systems on construction sites is already a sunk cost, the willingness of contractors to accept this approach could be increased if the existing equipment could be put to greater use.
Second, camera systems cover a larger area than RFID or IoT-based sensor systems and are more advantageous for use on construction sites where the layout is dispersed. Cameras with auto-tilt systems can also be better adapted to construction sites where the location of the construction process is constantly changing, focusing on key points of the construction site.
Third, computer vision-based method is non-invasive. This solution is more flexible than invasive detection such as RFID or wearable devices and also reduces the cost of equipment placement. Because there is no need to pre-arrange on the object to be detected, it has a better ability to respond to unanticipated situations.
Finally, the information acquired by the camera, although requiring more computing power to process, is richer than that of single-function sensors and RFID. The construction process is a complex one, and it is difficult to obtain a complete picture from a single sensor. However, vision-based image information contains information that can be used to identify and judge the construction process. Just as in traditional human-based site management, a construction worker can easily judge the construction process visually. The goal of the computer vision approach is precisely to give computers processing power similar to human vision.
The 3D laser is also a feasible method on construction sites. 3D point cloud is more detailed on-site information. However, the cost and detection range make it difficult to use for construction scenarios.
Table 9 shows the advantages and limitations of cameras, common sensors, and 3D laser in practical applications. It can be found that the camera may have greater advantages in certain scenarios.
In crowded and busy construction sites, vision-based methods of acquiring information have a unique advantage over other methods. With careful planning, hundreds of RFID tracking tags can be replaced by a small number of cameras placed on the construction site, significantly reducing the cost of information acquisition [
115].
5.2. Architecture of CV-Based CPS for Construction Process Monitoring
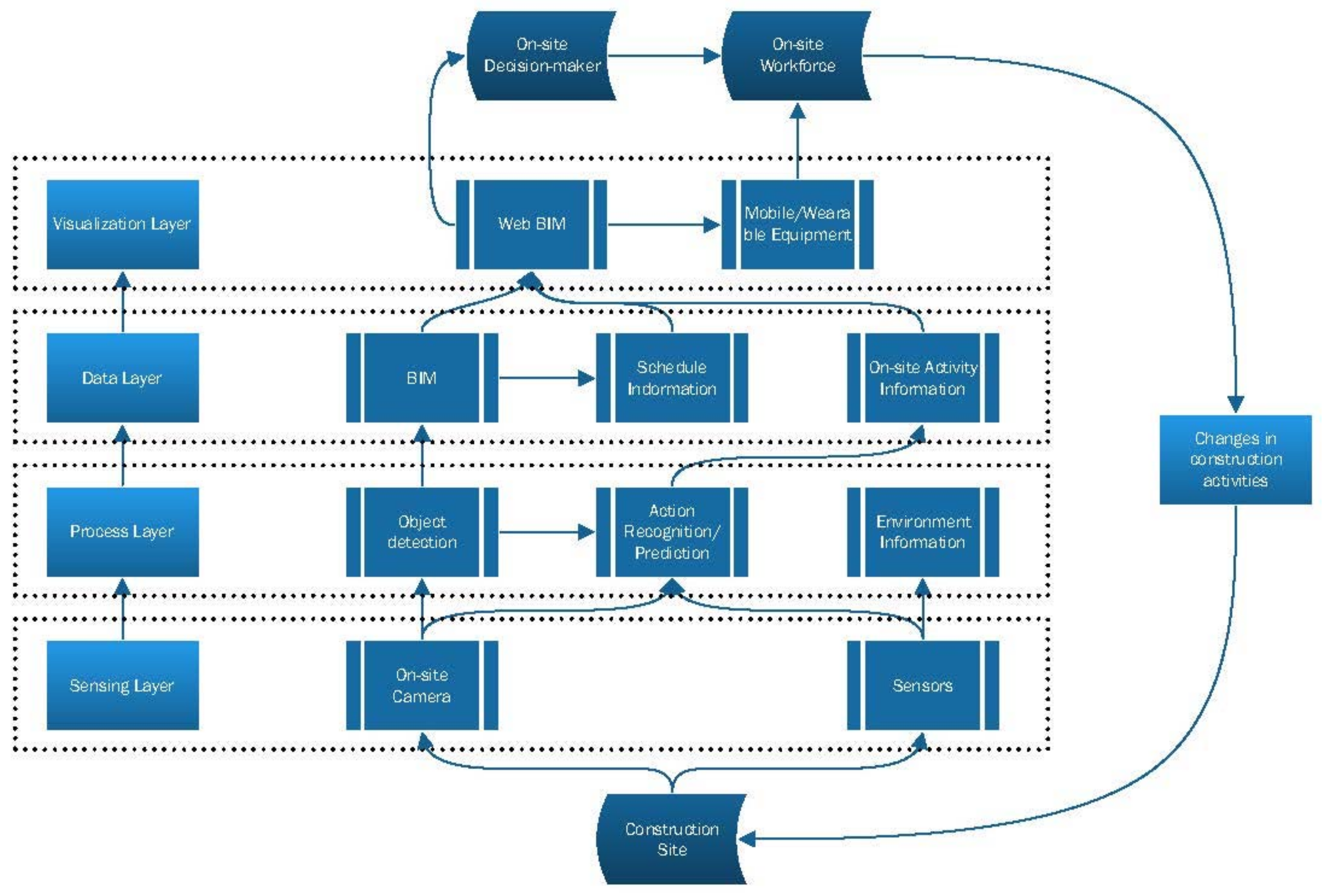
Based on the above reasons, the following CPS framework is proposed in this paper as a solution to the current difficulties in applying CPS in the construction field. The CPS architecture proposed in this paper places more emphasis on the mirror mapping between physical and digital entities on the construction site, and aims to establish a virtual construction site as well as a mirror relationship and synchronous mapping from a physical to virtual construction site through site sensing. First,
Figure 9 is the overall framework of CPS for the construction process. The composition and operational flow of this system are demonstrated in
Figure 10. The four layers of this system are as follows:
- (1)
Sensing layer: The function of this layer is to obtain primary information from the construction site and consists mainly of surveillance cameras installed at the construction site. At the same time, 3D lasers can be added to supplement the information acquisition channel in key areas. Other sensors can also be integrated into the system as additional information to obtain a more detailed site perception. The camera layout needs to cover as much of the main construction area as possible, with multiple viewpoints for areas where the workforce and equipment are concentrated as well as an overall view of the construction site.
- (2)
Process layer: Although visual data are rich in information, it is also more difficult to process than other methods. Especially for the complex environment of a construction site, the information required by the system is at many different levels, and the extraction of high-level, abstract, and computable information from the visual data requires a combination of different processing methods. Category and location detection, edge detection, and activity/state recognition of workforce and equipment require a composite approach. This layer is the computationally intensive part of the system, and the extraction of the various features in images needs to be considered in order to minimize the computational stress.
- (3)
Data layer: The function of the data layer is to integrate, archive, and store the original data (BIM, drawings, mechanical equipment parameters, etc.) with the real-time data from the site during the construction process. The original BIM needs to be matched with the real-time site conditions to derive the actual construction schedule information. In addition, the construction activity information obtained on-site also needs to be integrated with BIM to be used in subsequent analysis.
- (4)
Visualization layer: Due to the characteristics of the construction site itself, the closed-loop control of the site must be carried out by the workers on the construction site. The current building construction process is still in a human-dominated state. Construction sites also lack mechanical devices that can provide direct feedback control. Therefore, the feedback of information is mainly through two ways of the visualization layer. First, for the information directly related to construction site personnel such as safety information, this type of feedback is provided directly through the mobile devices or wearable devices of the on-site workers. The CPS environment typically includes humans, and humans function in a different way to the other components of a CPS. The architecture must support a variety of modes of human interaction with CPS to include the human as the CPS controller or partner in control [
20]. The best way to achieve human–computer interaction on site is based on the visualization of mobile/wearable devices. In this layer, commands and instructions can be given to workers on-site based on visual 4D models and mobile devices, providing feedback from the virtual to the physical side.
For the information that must be involved at the decision-making level such as productivity management, schedule control, and construction quality, the feedback control is provided through visual BIM presented directly to the decision-maker. This feedback mode is mainly determined by the current construction automation level and management mode. In the future, the construction site with higher automation can further optimize it to realize more intelligent and automatic decision-making and feedback.
This four-layer structure above provides a generalized framework for the construction process CPS. Considering the actual situation of the construction site, except for a few mechanical equipment, the construction site lacks actuators. This phenomenon is caused by the level of automation on site. This framework incorporates person–system and person–environment interactions into the system through a visualization layer that provides instructions or warnings to the on-site workforce as feedback. This framework is only a preliminary idea to achieve the co-application of CV and CPS. It is expected that this framework will provide ideas for the application of computer vision on construction sites and encourage the combination of CPS and CV methods to achieve smarter construction sites.
5.3. Limitations and Current Barriers
Although computer vision-based site sensing has many of the above-mentioned advantages, its current application on construction sites also has certain limitations. In order to overcome these limitations, there are still obstacles that need more novel technology to overcome.
First, the layout of the construction site frequently changes with the construction progress. From the time that equipment enters, the layout of the site will be constantly adjusted as the construction phase progresses. The working surface/temporary yard/temporary facilities will also change constantly during construction, and the number of tower cranes will also increase or decrease as construction proceeds. As cameras are often placed on construction equipment/facilities, these physical changes to the construction site will lead to additional challenges to the camera system and it will be difficult to achieve complete monitoring. Adjustments would also create more workload.
Second, the issue of occlusion during construction is also a major impediment to the application of visual methods. The problem of occlusion is multi-layered, starting with the problem of objects in front blocking objects in the rear in a localized area of the work surface. This can be solved by placing the camera at multiple views. The other level is the macro-level blocking of the existing work surfacing over the completed floor. Ensuring adequate views will greatly increase the number of cameras that need to be placed. The reliability of computer vision methods for extracting information is also an important issue.
Finally, visual methods for processing on-site video require more computing power. In addition, there is no appropriate method for calculating the different layers of information that need to be extracted, which leads to repetitive computation and wasted computing power. For the large-scale application of this CV-based approach, the above-mentioned knowledge gaps must be filled. Better solutions are still waiting to be proposed.
In addition, the current construction site automation is still at a low level, and a large amount of work needs to be done manually by the on-site workforce, which leads to a great limitation of the control method from the information side to the physical side of the CPS. Currently, feedback control can only be achieved through visualization and instructions to the on-site workforce to transfer information from the cyber side to the physical side. Although this approach enhances the digital and intelligence level of the construction site, there is still a gap between this approach and the automation control expected from CPS. This is a compromise due to the complexity and decentralized nature of the construction site. The solution to this problem is to look forward to the further development of automated construction, so that actuators that can be connected to the cyber-side on the construction site can play a major role.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}